
Approximation of Fractional Order PIλDμ-Controller Transfer Function Using Chain Fractions

 , , , ,
, , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- -
- to obtain analytical expressions for the approximation of the components of PIλDμ-controller transfer functions through the application of the chain fraction theory;
- -
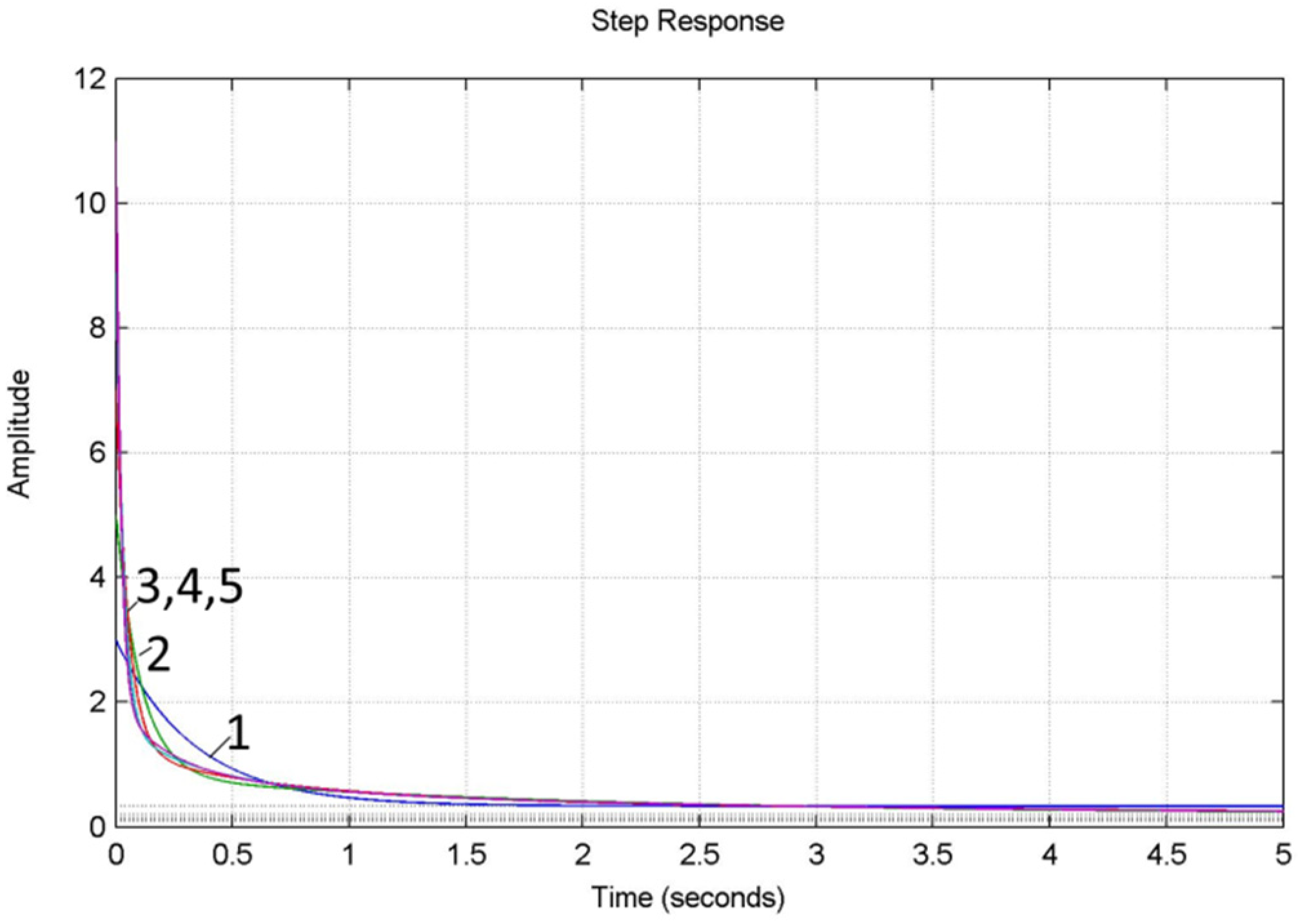
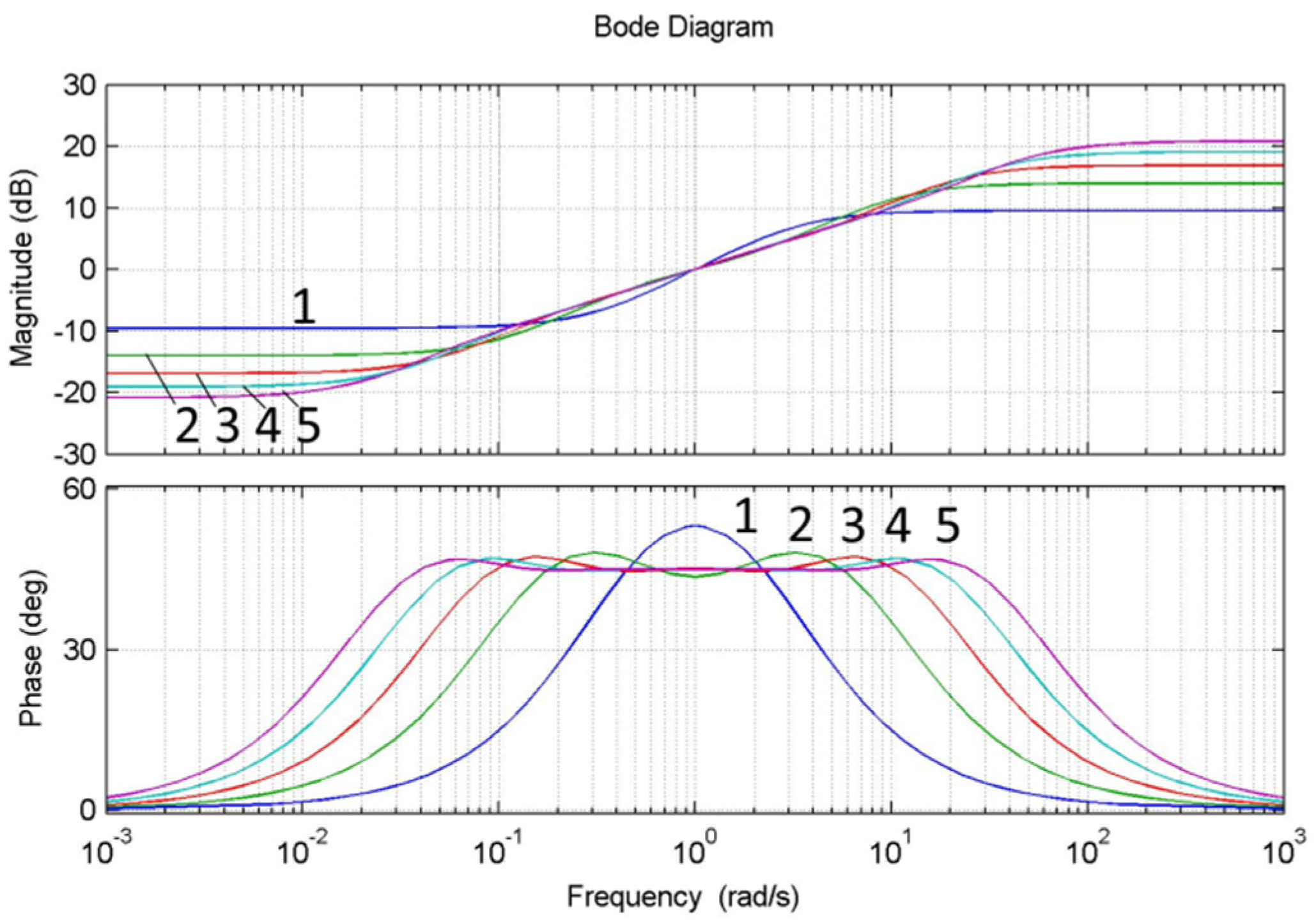
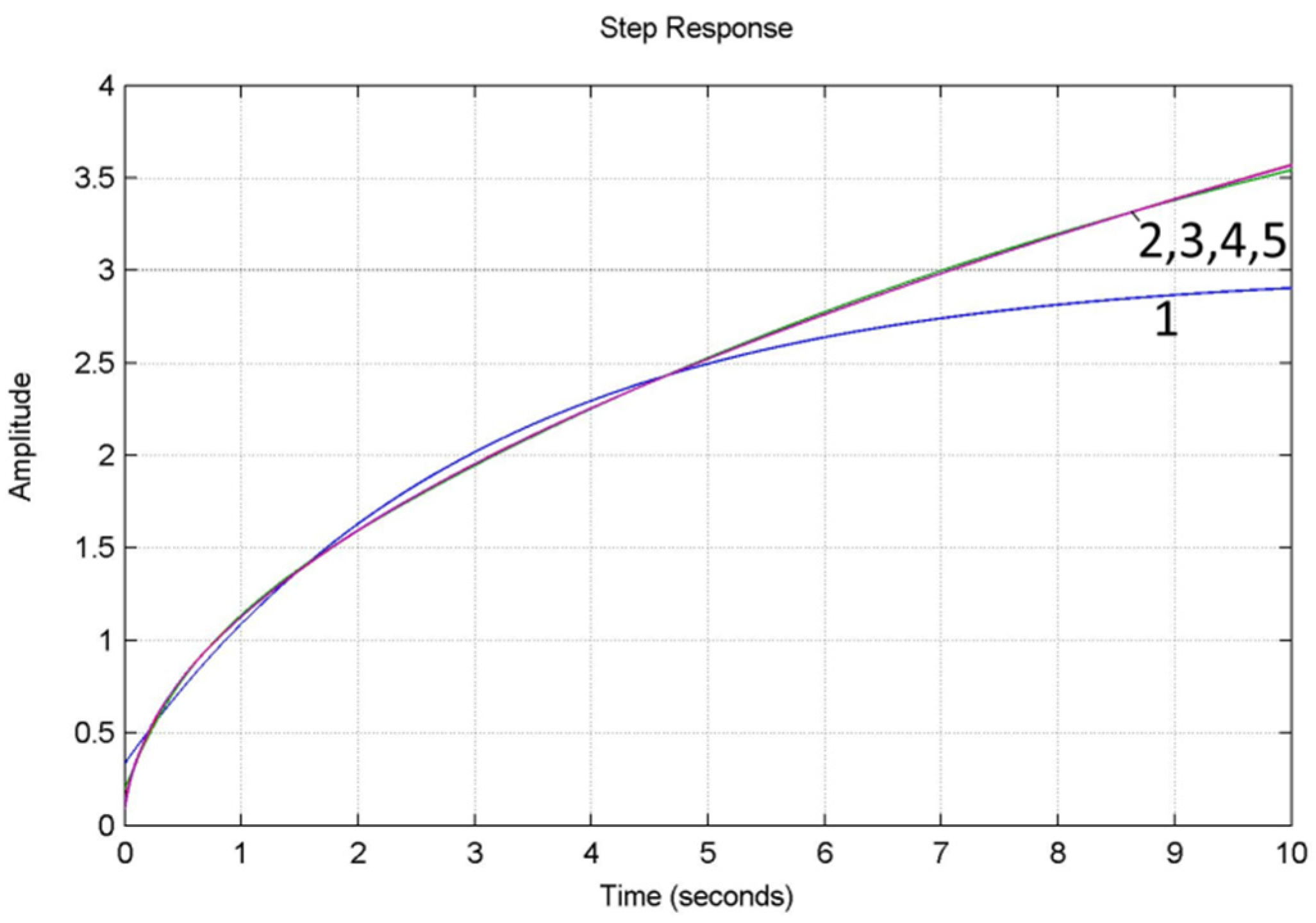
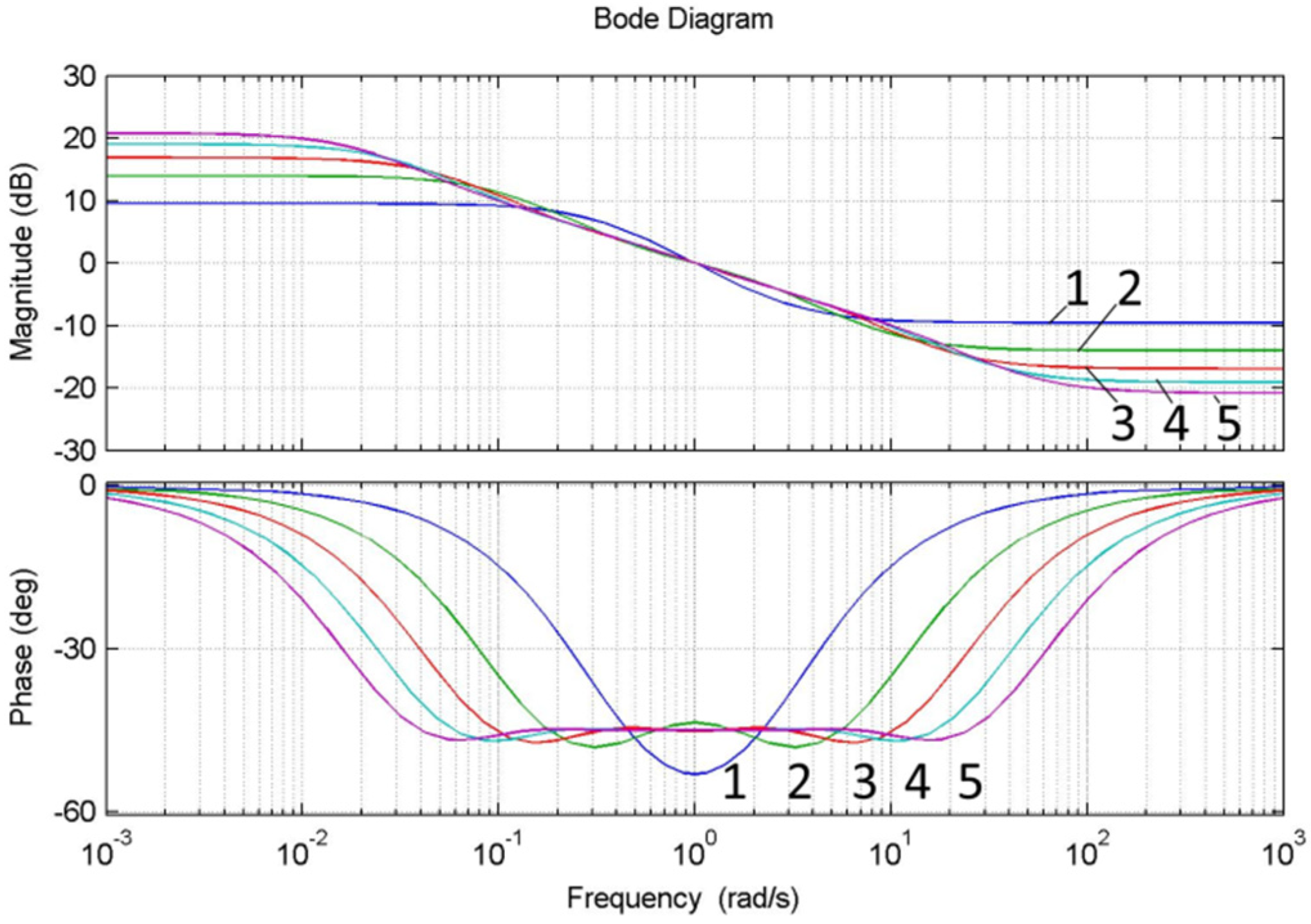
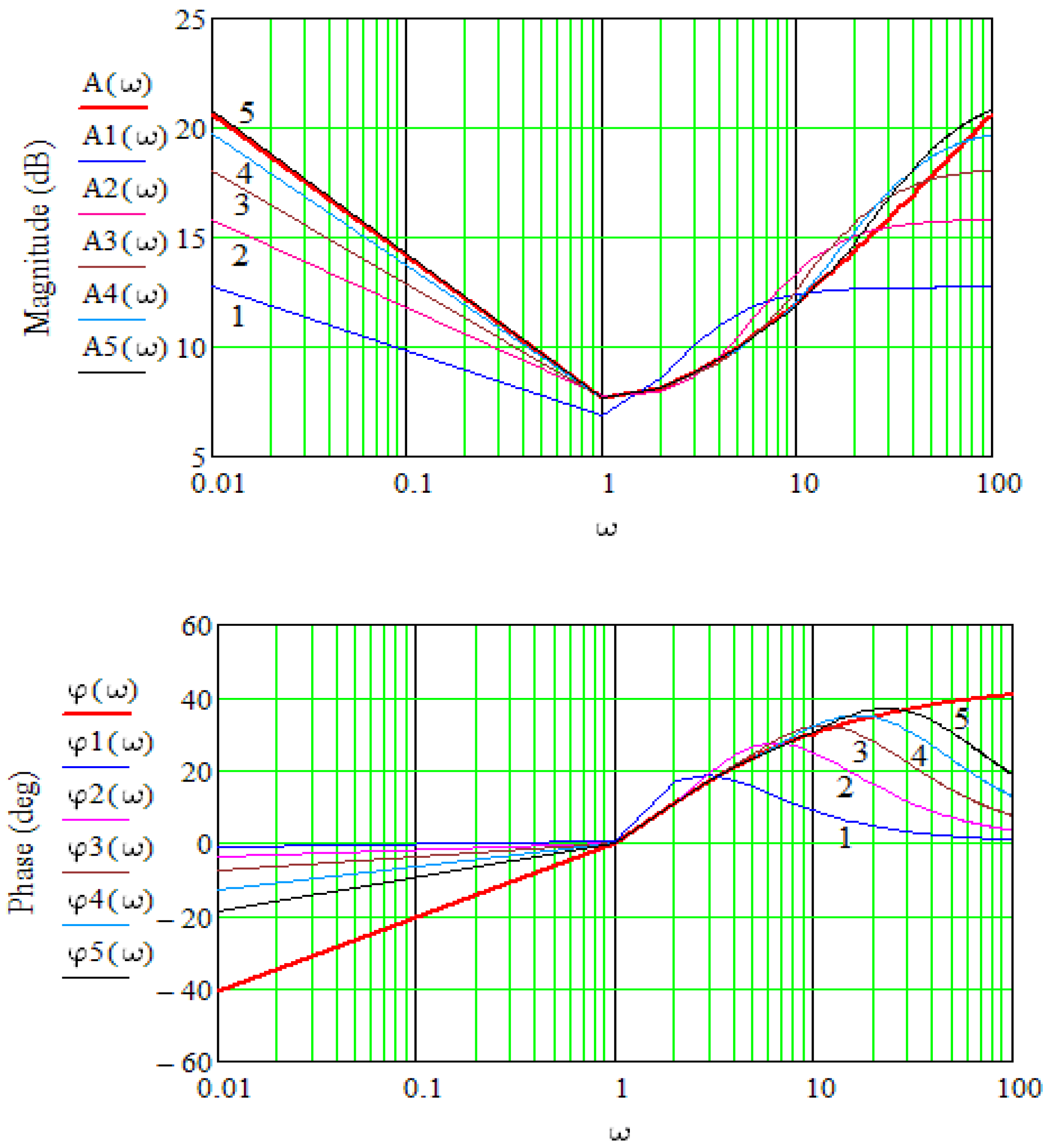
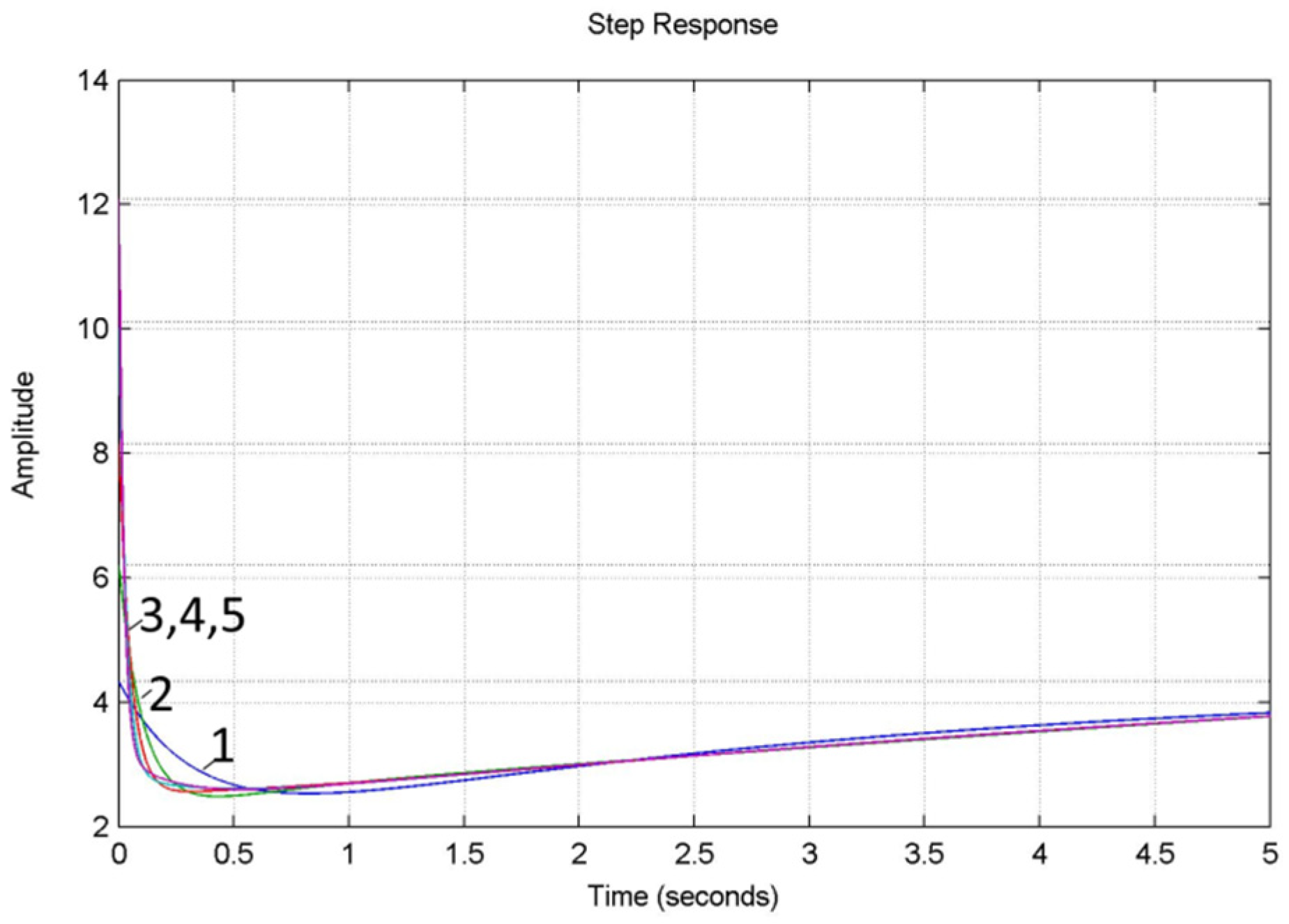
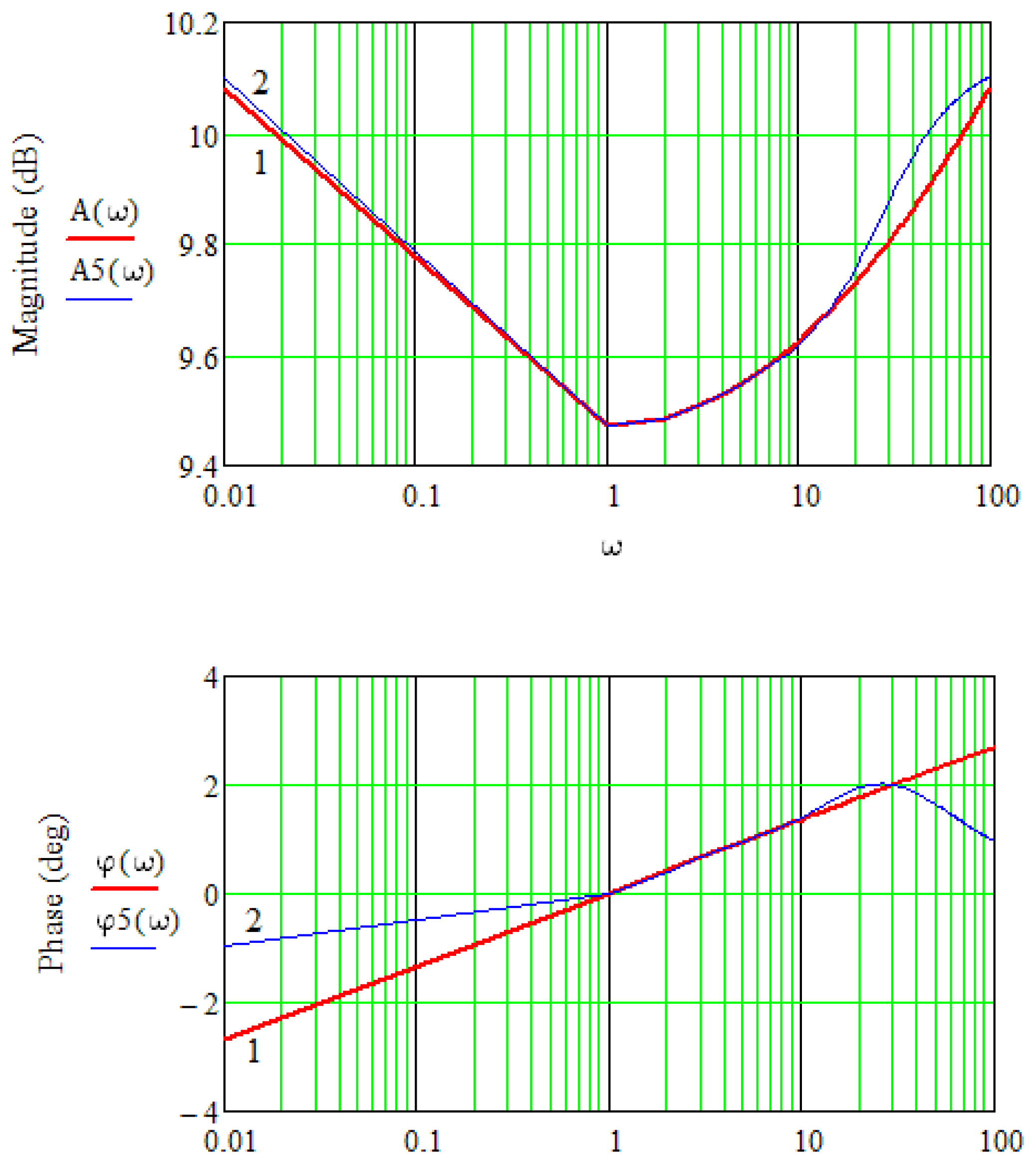
- to analyze the accuracy of the approximation of fractional order PIλDμ-controller TFs by the method of chain fractions by analyzing the transition functions and frequency characteristics of the units Dμ(α = μ = 0.5) and Iλ (α = λ = −0.5) for five different orders of decomposition by the method of chain fractions;
- -
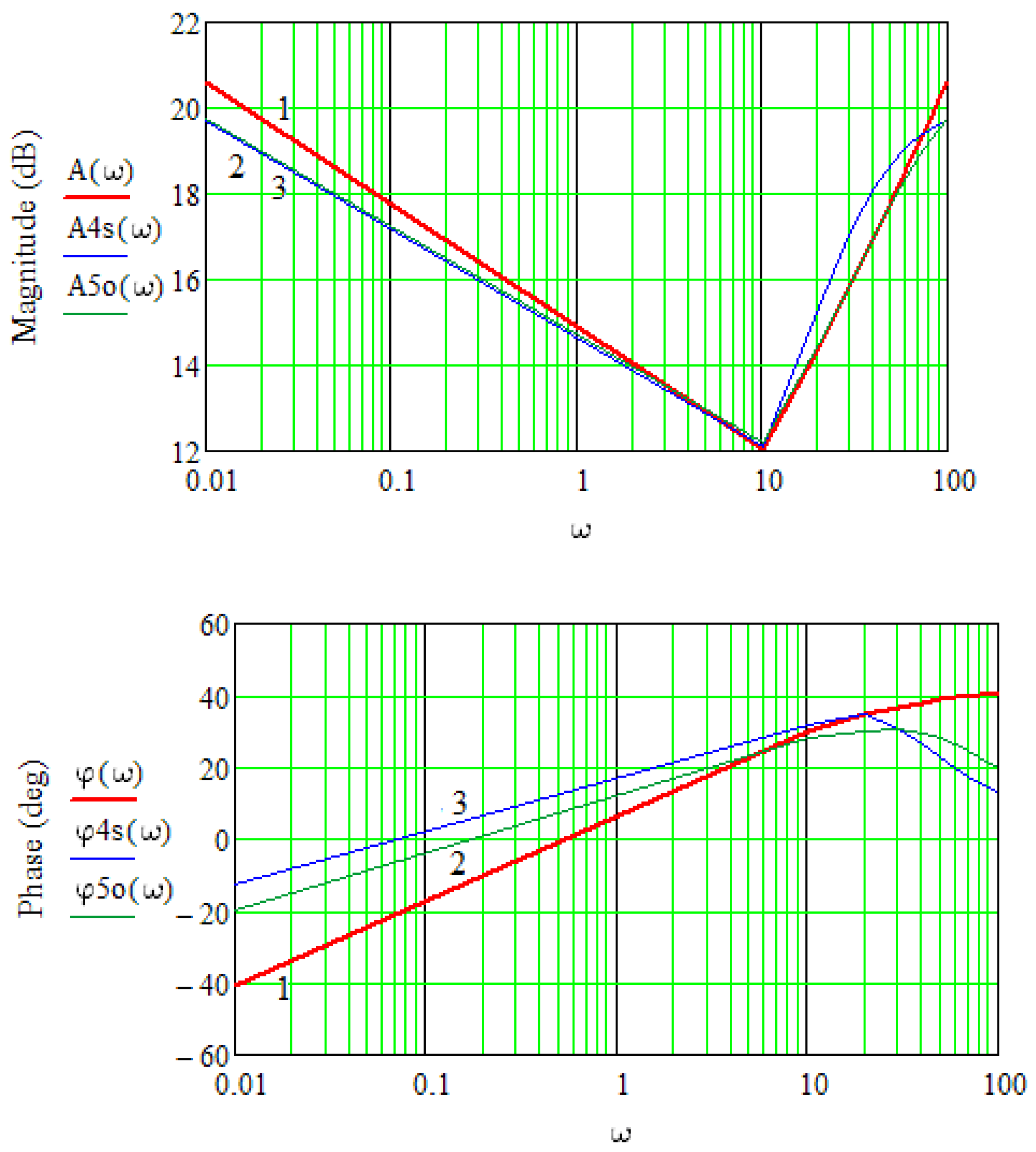
- to compare the approximated TFs with polynomials of the same order obtained by the methods of Oustaloup and chain fractions for α = ±0.5 and to establish the advantages of using the method of chain fractions to approximate the TFs of the PIλDμ-controllers.
2. Application of the Oustaloup Transformation for Approximations of Fractional Order TFs
- (1)
- integral fractional unitN = 1N = 2
- (2)
- differential fractional unitN = 1N = 2
3. Application of Chain Fractions for Approximation ofthe Fractional Order Operator
4. Conclusions
- Analytical expressions based on the application of the chain fraction theory to approximate the components of the transfer functions of PIλDμ-controllers have been obtained.
- The accuracy of the approximation of the fractional transfer function by the method of chain fractions has been researched by analyzing the transition functions and frequency characteristics of the units Dμ and Iλ for five different orders of decomposition by the method of chain fractions.
- The comparison of the transfer functions, approximated by different order polynomials, has been conducted. As a result, the possibility of obtaining the same approximation accuracy has been established under the condition of using the method of chain fractions of the lower order. Using this approximation method simplifies the implementation of PIλDμ.
- The analysis proved the possibility of using the method of chain fractions to approximate the transfer function of PIλDμ-controllers. The accuracy of the same order transfer function approximation is higher when the method of chain fractions is used. Based on the analysis of the system’s performance of the expected frequency effects, it is necessary to choose the appropriate approximation order to ensure the specified accuracy of the approximation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kopchak, B.; Marushchak, Y.; Kushnir, A. Devising a procedure for the synthesis of electromechanical systems with cascade-enabled fractional-order controllers and their study. East.-Eur. J. Enterp. Technol. Inf. Technol. Ind. Control. Syst. 2019, 5, 65–71. [Google Scholar] [CrossRef] [Green Version]
- Lozynskyy, O.; Mazur, D.; Marushchak, Y.; Kwiatkowski, B.; Lozynskyy, A.; Kwater, T.; Kopchak, B.; Hawro, P.; Kasha, L.; Pękala, R.; et al. Formation of characteristic polynomials on the basis of fractional powers j of dynamic systems and stability problems of such systems. Energies 2021, 14, 7374. [Google Scholar] [CrossRef]
- Oustaloup, A.; Levron, F.; Nanot, F.; Mathieu, B. Frequency band complex non-integer differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 25–40. [Google Scholar] [CrossRef]
- Kopchak, B. Development of fractional order differential-integral controller by using Oustaloup transformation. In Proceedings of the 2016 XII International Conference on Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, 20–24 April 2016; pp. 62–65. [Google Scholar] [CrossRef]
- Khovanskii, A.N. The Application of Continued Fractions and Their Generalizations to Problems in Approximation Theory; P. Noordhoff: Groningen, The Netherlands, 1963. [Google Scholar]
- Krishna, B.T.; Reddy, K.V.V.S. Active and passive realization of fractance device of order ½. Act. Passiv. Electron. Compon. 2008, 2008, 369421. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Perumalla, S.; Vista, J.; Ranjan, A. Realization of single and double cole tissue models using higher order approximation. In Proceedings of the 1st International Conference on Electronics, Materials Engineering and Nano-Technology (IEMENTech), Science City, Kolkata, India, 28–29 April 2017; pp. 1–4. [Google Scholar]
- Pu, Y.; Yuan, X.; Liao, K. Structuring analog fractance circuit for 1/2 order fractional calculus. In Proceedings of the 6th International Conference on ASIC (ASICON’05), Shanghai, China, 24–27 October 2005; Volume 2, pp. 1136–1139. [Google Scholar]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Section 5.2. Evaluation of Continued Fractions. In Numerical Recipes: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: New York, NY, USA, 2007. [Google Scholar]
- Cuyt, A.; Brevik Petersen, V.; Verdonk, B.; Waadeland, H.; Jones, W.B. Handbook of Continued Fractions for Special Functions; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Rockett, A.M.; Szüsz, P. Continued Fractions; World Scientific Press: Singapore, 1992. [Google Scholar]
- Scheinerman, E.; Pickett, T.; Coleman, A. Another Continued Fraction for π. Am. Math. Mon. 2008, 115, 930–933. [Google Scholar]
- Collins, D.C. Continued Fractions. MIT Undergrad. J. Math. 1999, 1, 11–20. [Google Scholar]
- Martin, R.M. Electronic Structure: Basic Theory and Practical Methods; Cambridge University Press: Cambridge, UK, 2004; p. 557. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marushchak, Y.; Mazur, D.; Kwiatkowski, B.; Kopchak, B.; Kwater, T.; Koryl, M. Approximation of Fractional Order PIλDμ-Controller Transfer Function Using Chain Fractions. Energies 2022, 15, 4902. https://doi.org/10.3390/en15134902
Marushchak Y, Mazur D, Kwiatkowski B, Kopchak B, Kwater T, Koryl M. Approximation of Fractional Order PIλDμ-Controller Transfer Function Using Chain Fractions. Energies. 2022; 15(13):4902. https://doi.org/10.3390/en15134902
Chicago/Turabian StyleMarushchak, Yaroslav, Damian Mazur, Bogdan Kwiatkowski, Bohdan Kopchak, Tadeusz Kwater, and Maciej Koryl. 2022. "Approximation of Fractional Order PIλDμ-Controller Transfer Function Using Chain Fractions" Energies 15, no. 13: 4902. https://doi.org/10.3390/en15134902