
Mobile Networks’ Support for Large-Scale UAV Services

Abstract
:1. Introduction
2. UAS Ecosystem Status
- inspection and monitoring—civil and critical infrastructure inspection (wind power plants, oil and gas infrastructure, and pipelines), energy efficiency and consumption (aerial thermography), surveillance, farming, and forestry;
- mapping and surveying—photogrammetry, natural resources exploration and utilization assessment, mapping of fields and crops in precision farming, etc.;
- spraying and seeding—firefighting, forestation, precision farming, etc.;
- filming and photography—entertainment, archaeology, etc.;
- transport and delivery—retail (parcel delivery), healthcare (transport of medicines, blood, tissues for transplantation), etc.;
- security, search, and rescue—assistance during natural disasters, surveillance of law obedience and enforcement, monitoring of large-scale events and state borders;
- Public Land Mobile Network (PLMN) coverage extension (occasional hovering base stations), collection of data from off-network coverage Internet of Things sensors.
2.1. UAV in the Aviation Ecosystem
- Risk management: the methods for identification, assessment, avoidance, mitigation, and accepting risks that can occur during UAV flights;
- Contingency planning: defining the steps to take when the risk occurs;
- Flight traffic management: enforcement of mechanisms and procedures that allow for efficient management of drones in the airspace, including prioritization of operations, risk mitigation (e.g., caused by battery depletion, UAV malfunction), collision avoidance, etc.
- (U1) U-space foundation services: support for e-registration, e-identification, and geofencing services;
- (U2) U-space initial services: support for the management of UAV operations that include flight planning, flight approval, tracking, airspace dynamic information exchange;
- (U3) U-space advanced services: addressing complex use cases (operations in dense areas, capacity management, assistance in conflict detection);
- (U4) U-space full services: provision of services integrated with systems supporting manned aviation (ATM), full operational capability of U-space, automation of offered services.
- Aerial vehicles—UAVs and manned aircraft;
- Ground Control Station (GCS): the hardware and software used for remote communication and control of UAVs;
- DOPs—commercial or recreational;
- U-space Service Provider (USSP), one or more operators of a UTM system handling flight-related procedures in a specific area;
- Aviation Authority: an entity responsible for the management of flight information and manned aircraft traffic;
- Public Safety Authority: e.g., fire companies, rescue and emergency medical organizations, police, etc.
- UAV Identification and Tracking: services, which enable registration (including registration assistance), e-identification, position reporting, and exchange of surveillance data;
- Airspace Management and Geofencing: services providing geo-awareness and enabling management of aeronautical and geofence information;
- UAV Mission Management: services facilitating the preparation, optimization, and processing of mission plan, risk analysis [20] and enabling dynamic management of the airspace capacity;
- UAV Conflict Management: service group responsible for conflict resolution on a strategic (pre-flight) and tactical (in-flight) level;
- Emergency Management: services providing incident/accident reporting (drone pilots/operators, citizens) and DOPs’ support during emergencies;
- Monitoring: monitoring of navigation and communication infrastructure, gathering of traffic control and all user activities that impact U-space environment;
- Environment: services providing information on weather conditions, geo-spatial positioning, electromagnetic interference, coverage (both navigation and communication), or population density in the area of concern;
- Interface with Air Traffic Control (ATC): provision of interfaces and procedural support for communication with ATC entities.
- Users: aircraft and UAS operators, pilots, and supervisors;
- ANSP: service providers of Aeronautical Information Service, Flight Authorization, Dynamic Airspace Management, and Tactical Conflict Resolution between Manned Aircraft and UAVs;
- Common Information Services providers: providers of Drone Aeronautical Information Management, Emergency Management and Network Identification Data services, and Flight Plan Management, responsible for data synchronization between USSPs;
- USSPs: providers of U-space services, i.e., the information and mechanisms that support the operation of UTM during flight planning and flight execution phases.
- Network Identification: continuous collection of telemetry information (including location) from airplanes and UASs;
- Geo-Awareness: propagation of information on airspace restrictions/requirements, which enables strategic and tactical deconfliction (operational conditions, airspace limitations, existing time restrictions);
- UAS Flight Authorization: flight plan approval at strategic phase (covering evaluation of flight intent constraints and conditions taking into consideration all available aeronautical information, priorities of other planned missions, appropriate risk analysis and mitigation, etc.), and flight approval at tactical phase;
- Traffic Information provision: providing information about any conspicuous air traffic (manned aircraft and UAS traffic) that may be in proximity to the position or planned route of the UAS flight;
- Weather Information provisioning (optional): providing weather condition information in the area of concern during flight planning and execution phases;
- Conformance Monitoring (optional): checking that ongoing missions comply with the operational conditions, the EU requirements, the constraints of the airspace, and the terms of the UAS Flight Authorization;
- CIS (optional): providing a touchpoint for U-space actors to obtain reliable information on operations and situations that can have an impact on airspace, delivered in a timely and synchronized fashion.
2.2. UAS Ecosystem Communication Requirements
- Direct stick steering: the GCS → UAV control message contains direction instructions, while the optional FPV is provided as the feedback from UAV to GCS (used in both direct and network-assisted C2 communication).
- Steer to waypoints: the GCS/UTM → UAV control message contains the flight declaration, e.g., waypoints (used in C2 communication in both cases: direct—VLOS and network-assisted—VLOS and BVLOS).
- Approaching autonomous navigation infrastructure: the UTM → UAV control message contains direction instructions, e.g., waypoints, altitudes, and speeds; during the landing/departure operations, the UAV is coordinated more closely with the locally available autonomous navigation infrastructure (used in UTM-navigated C2 communication).
- Automatic flight by UTM: the UTM → UAV control message contains a pre-scheduled flight plan, e.g., in the form of an array of 4D polygons (3D space dimensions with the dimension of time); UAV thereafter flies autonomously with periodic position reporting (used in UTM-navigated C2 communication).
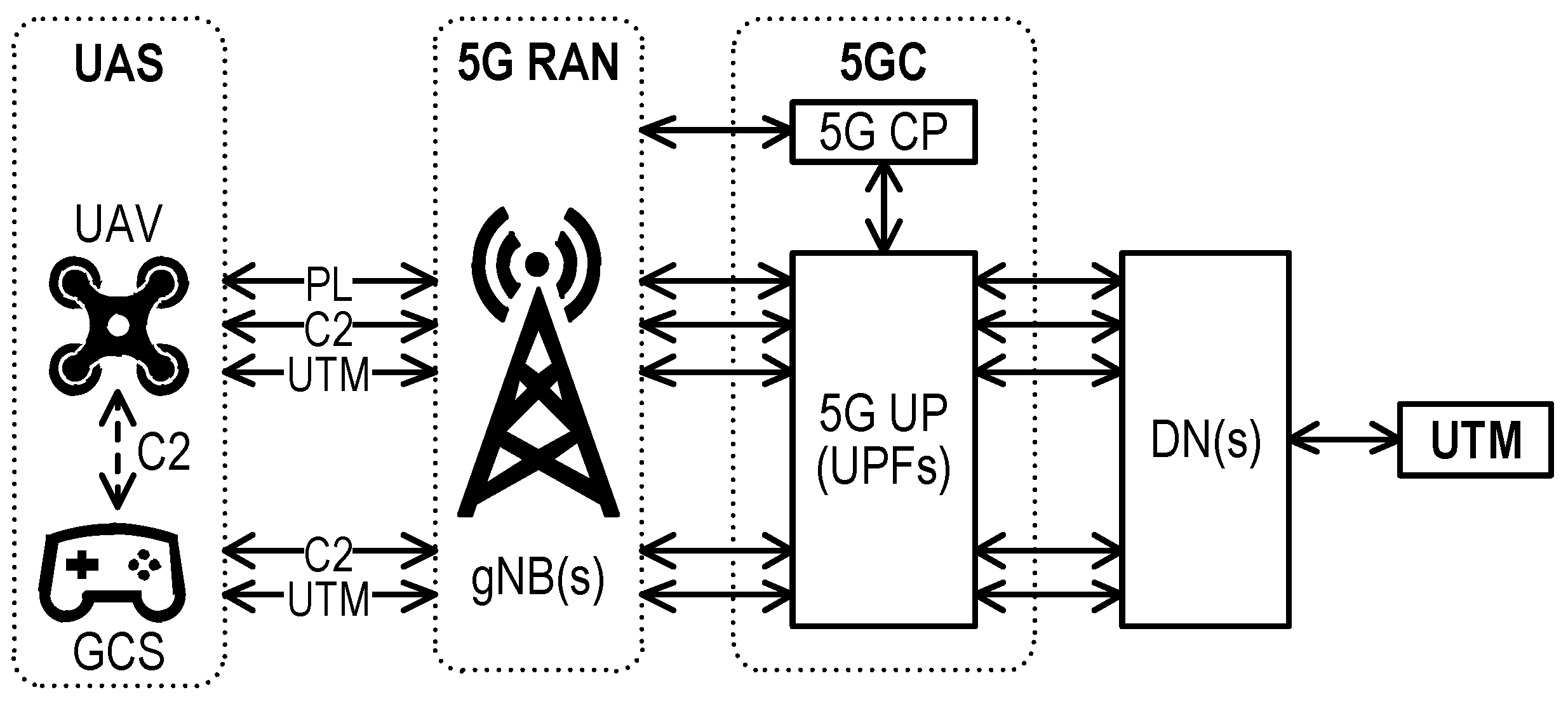
- Multiple communication links (for C2, UAS ↔ UTM, non-mandatory FPV, and UAV use case-specific payload transmissions) with different QoS targets.
- Non-payload connectivity QoS—depending on the control model, the required E2E latencies vary from 10 ms to 5 s, and the supported maximum UAV speeds relative to the ground are between 50 km/h and 300 km/h, and reliabilities between 99% and 99.99%. For the FPV aid in BVLOS flights (more challenging case), the video streaming QoS requirements are 4 Mbps at 720p/30 fps with 140 ms E2E latency and 99.99% reliability.
- Non-payload connectivity through PLMN (UTM ↔ UAV/GCS or GCS ↔ UAV in BVLOS) or directly in the Device to Device (D2D) model (GCS ↔ UAV in VLOS, UAV ↔ UAV, also cross-PLMN).
- Payload connectivity—the most demanding QoS targets are 120 Mbps (UAV-originated) and 20 ms.
- UAV remote identification and traffic management—association of UAV with its GCS, on-network UAV → GCS/UTM position reporting and local, D2D UAV → UAV broadcasting of the information about UAV’s presence (identifier, location, flight azimuth, and speed) for collision avoidance in a small radius (600 m) with a maximum latency of 100 ms, PLMN-based UAV location with the 0.1–0.5 m horizontal and 1 m vertical accuracy and 1 s position estimation latency, and detection of UAVs operating without authorization.
- Service status monitoring—real-time monitoring of UAS links status and performance both for UTM and GCS, monitoring of the UAVs service status in a certain geographical area and/or at a specific time (refers especially to C2 communication).
- Early warning about the risk of communication loss—notification of the GCS pilot or UTM that a UAV is about to leave the 5GS UAS services’ authorization space (altitude, coverage area, etc.).
- Security and trust—ensuring the traffic protection of the UAS ↔ UTM data and their integrity, non-repudiation, and privacy, protection from spoofing attacks of UAS identities.
3. UAS Services Support by 5GS
3.1. General Characteristic of 5GS
- CP programmability, additionally boosted by its SBA, where functional entities expose services as their Producers or discover/consume them as Consumers, within the RESTful framework Application Programming Interface (API) based on JSON—serialization, HTTP/2—application layer, and TCP—transport.
- UP programmability, i.e., its flexible composition as a chain of atomic functions to process the UP traffic according to the specificity of the use case or communication service requirements, e.g., firewall, deep packet inspection, selective marking or altering, encapsulation, classification, forwarding or redirection of user traffic, anti-virus protection, parental control, etc.
- NS that breaks with the hitherto approach to the mobile network as a universal one in favor of the vision of a “federation” of virtual parallel networks, individually tailored to the specific requirements of the specific supported services but jointly using certain mechanisms, e.g., mobility or user capabilities subscription management. The adaptation to the requirements may consist of a different architecture of user traffic processing in a UP chain for each service class. Thus far, 3GPP has defined the following network slice types [34]: Enhanced Mobile Broadband (eMBB), Ultra-Reliable Low-Latency Communication (URLLC), Massive Machine Type Communications (mMTC), and two additional Vehicle to Everything (V2X) classes (since the Release 16) and High-Performance Machine-Type Communications (HMTC) (since the Release 17); future extensions are possible. Slice-specific CP functions can be flexibly integrated with 5GS CP, using separation mechanisms of the SBA CP communication bus. As UE may use applications demanding various communication services, the UE ability to attach to multiple slices on-demand has to be supported with proper network-side mechanisms of selection and admission control.
- Embedded analytics and prediction capabilities regarding UE (mobility, abnormal behavior, traffic volume, etc.), QoS changes in geographical areas, congestion, observed service experience, and more [35].
- Location Services (LCS) [36] framework enabling the provisioning of target UE location information (geographic location, velocity, or civic location), taking into consideration the security policies. The privacy control is enabled by several mechanisms that include, among others, aliases for UE anonymity maintenance, access restrictions by codewords, whitelisting of LCS clients, etc. In the LCS framework, both UE-assisted and network-based (using RAN node mechanisms) locations are supported.
- Network capabilities exposure, which enables the 5GS control and management mechanisms integration with external systems (e.g., of vertical industries). The native mechanisms of CP can be exposed, as well as the special Application Functions (AFs), acting as “embassies” of the Application Plane services, can be hosted by CP.
- Common Application Programming Interface Framework (CAPIF) [37], i.e., a unified northbound interface API framework for 3GPP functions, which allows secure exposure of 5GS CN APIs to external consumers. It also specifies how the third parties can define and expose their own APIs.
- Service Enabler Architecture Layer for Verticals (SEAL) enables reusing the core functions and mechanisms already developed by industries in parallel use cases via a standardized framework. The interconnection and inter-service communication has been specified to enable distributed deployments and access [38].
3.2. A Discussion on 5GS Support of Generic UAS Solution
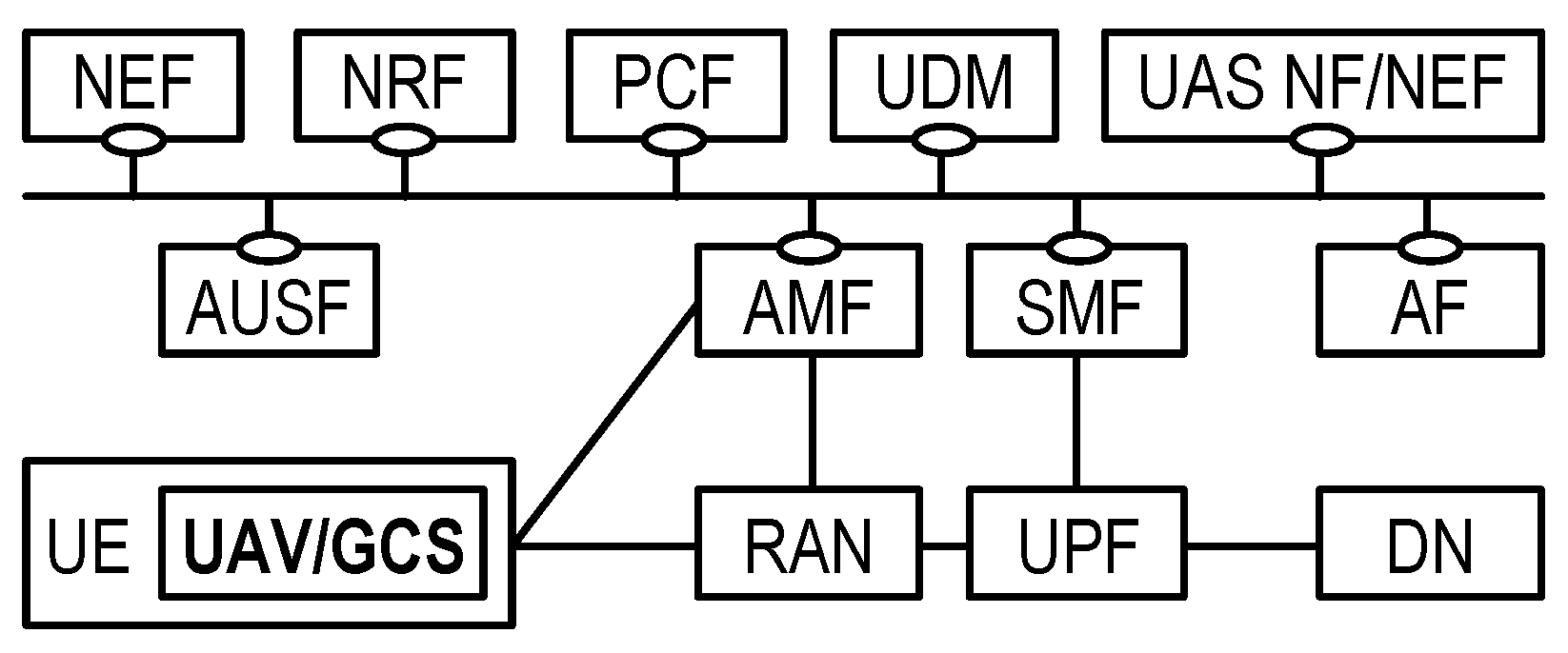
- Network access and mobility—access to network resources is enabled by RAN nodes and the Access and Mobility Management Function (AMF). The most significant RAN mechanisms that benefit UAS refer to proactive coverage improvement [40] by, e.g., beam management (beamforming, beam steering) or massive Multiple Input Multiple Output (MIMO). The AMF is responsible for handling mobility aspects of connected UEs (UAV/GCS) and can be treated as a CP proxy for interactions with UEs and New Radio (NR) (used, e.g., for requesting positioning information based on RAN measurements [41]).
- Authentication functions—the primary functions that handle UE authentication are Authentication Server Function (AUSF) and 5G-Equipment Identity Register (5G-EIR). The foremost is responsible for conducting procedures that allow for UE authentication and authorization [42]. The 5G-EIR entity allows the identification of the on-board UE as UAV-capable that can be used during admission or the 5G network registration phase.
- Location—UE location services, i.e., LCS, are provided by the Location Management Function (LMF)and exposed by Gateway Mobile Location Centre (GMLC). The alternative source of a precise location of the requested UE (or a group of UEs) can be useful, e.g., for the purpose of validation of location data provided by UAV/GCS or in case of on-board navigation malfunctions. The provided location data can be delivered in a request-response, periodic, or triggered manner and extended by estimations of UE velocity and location accuracy assessment.
- User data transfer—User Plane Function (UPF) enables user data flow forwarding in the network under given QoS requirements and its routing to the DN (e.g., Internet access, 3rd party services). The individual UPF and the context of the established data session are managed by the Session Management Function (SMF). The transferred user data is charged on the basis of policies specified in Policy and Charging Function (PCF), which can be implemented with respect to different business models of 5G UAS.
- NS-associated functions—they include NSSAAF, which is responsible for the authentication and authorization of the UE that tries to attach to the slice. It can be used to elevate the security of the slice and mitigate the admission of unprivileged UEs. Network Slice Selection Function (NSSF) cooperates with Network Repository Function (NRF) to validate, determine, and select Network Slice Instances and AMFs to serve the requesting UAV/GCS UE.
- Data analytics—NWDAF enables the collection of data from all 5GS Network Functions (NFs), processing of the data, and performing analytics and predictions on their basis. It can assist UAS by providing real-time UAS links monitoring, communication loss risk detection, or possible QoS degradation (e.g., due to network congestion), by improving the security of UAS operation, e.g., by the identification of abnormal behavior of connected UAV/GCS UEs. The NWDAF enables triggering UE-specific threshold crossing events, which can assist UAS in the context of risk management procedures.
- Assisting functions—3GPP allows the extension of CP by implementing its own functions on the basis of a generic AF. This opportunity can be leveraged by the aviation ecosystem to extend network capabilities to match their specific needs (e.g., enhance admission procedures). The exposure of all network functionalities is performed by Network Exposure Function (NEF)/Service Capability Exposure Function (SCEF).
- U-space support entities—communication between USSP and 5GC is facilitated by the Unmanned Aviation System Network Function (UAS NF), which can be treated as the interface and a wrapper of functionalities that may be of interest to the USSP. UAS NF supports functionalities related to UAV identification, authentication, authorization, and tracking, as well as Remote Identification [39]. Moreover, it exposes services of location reporting, presence monitoring, obtaining a list of UAV-UEs in a geographic area, and control of QoS/traffic filtering for C2 communication.
4. 5GS and UAS Ecosystem Integration According to 3GPP
- NEF: for authenticated/authorized communication with USSP (an external entity). A NEF dedicated to UAS can be used;
- AMF: for triggering the UUAAMobilityManagement (UUAA-MM) procedure for a UE requiring UAV authentication and authorization by a USSP when registering with 5GS;
- SMF: may trigger the UUAA Session Management (UUAA-SM) procedure for Aerial UE requiring UAV authentication and authorization by a USSP when requesting UP resources or may trigger the authorization of the UAV–GCS pairing or during the establishment (modification) of the DN connection for C2 communication.
5. Network Slicing-Based Approach to 5GS and UAS Integration
6. Open Issues Related to Mobile Network Usage for UAV Services
- Lack of direct D2D link to provide the ability of short-distance direct communication among all the UAVs, including those served by different PLMNs. This type of communication is widely used in aviation to broadcast location/telemetry information. It is also one of the main enablers for inter-UAV communication in UAV swarm. Its standardization is still ongoing within Release 18, named “5G Advanced” [44].
- UAV support in NR—while the support of some mechanisms important for UAS support in 5G RAN have already been included up to Release 17 (e.g., RAN slicing, NR MIMO, enhancements of NR positioning and coverage, etc.) [43], the dedicated support of UAVs in NR is only in the scope of Release 18—to be finished in the middle of 2024 [44].
- Seamless edge applications context switching—the problem is linked with seamless context switching of edge applications (change of the edge cloud or server). The network should be able to predict handover and forward the whole application’s context in advance, e.g., GCS, from one server to another, and to switch between different instances of the applications. However, the time duration of context transfer can exceed the tolerable delay for latency-critical services [47] due to the standardized procedure [48] and virtualization aspects [49,50]. This problem can be solved by giving control over the user context transfer to the application, as described in [47]. Additionally, there is still an unresolved general problem of integration of various architectural frameworks having functional overlaps and hence subject to suffering from the uncoordinated competition of overlapping mechanisms (e.g., 5GS, virtualization, and edge computing frameworks) [51].
- Lack of sharing of 3D RAN coverage information and network planning itself—up to now, PLMNs were planned to handle terrestrial communication and were optimized to provide the best coverage at the fixed, average human-height-optimized level. When UAS are considered, they will operate at completely different and variable height levels. The network planning tools as well infrastructure itself (e.g., thanks to the beamforming feature), should be capable of dynamic, case-by-case, adaptation to different coverage requirements (providing the required QoS for different missions). Another aspect of network coverage is the ability to share this information with third parties. Based on the business value of this information, it was common that MNOs were not sharing reliable details of these assets. Now it becomes required by flight planning and flight validation processes: it is a part of risk analysis and risk mitigation to foresee and predict the planned and guaranteed availability of network coverage and quality. This data should be shared at the mission planning stage for DOPs as well as with USSPs to validate the operational flight plans. The data should describe coverage and quality data in 4D (space and time) to confirm given PLMN’s quality in a particular time frame corresponding to the planned time of the mission. As of today, however, there exist no interfaces in the 5GS management system that allow for exposing coverage data to external, trusted entities. An exemplary solution to the issues mentioned above is presented in [52], where a function called U-space Coverage Correlation (UCC) has been introduced. The UCC entity is an intelligent, crowd-sensing database that cooperates with MNOs in order to provide reliable PLMNs quality information in each of the flight phases to DOP and UTM.
- Lack of mechanisms for proactive coverage improvements on demand, e.g., by UTM during flight execution. Despite the provisioning of low-level mechanisms (e.g., beam management), no interfaces are exposed by the operator to request coverage improvements in the specific area. Such capabilities can be offered, however, by using dedicated RAN controllers, such as Open RAN (O-RAN) that enable the deployment of applications dedicated to RAN optimization. The exemplary UAS-oriented applications include flight path-based UAV resource allocation, radio resources allocation for UAV applications, massive MIMO optimization (e.g., for adaptive beam management to follow UAV swarm) etc. [53]. Moreover, the generic application template has been defined that allows a free extension of RAN controller functions (e.g., by APIs exposure). However, 5GS and O-RAN are not integrated yet, making the cooperation of systems problematic. A proposal to address this issue has been described in [54].
- Internal roaming for UAS—significant communication coverage improvements could be achieved by allowing the UAV to connect to any operator providing the best quality of network in the area of concern. To that end, the currently non-existent internal roaming policies regarding UAV-UEs traffic should be established between PLMNs.
- Cross-border operations—the paradigms of “Single European sky” (UAVs operations in any EU country, regardless of the country of UAV registration and pilot certification) as well as “free movement of goods and services” in the EU imply the demand for low latency services (FPV 20 ms) in roaming, hence the Local Break-Out (LBO) roaming architecture (alone or hybrid) has to be used. Thus far, although also defined for LTE, it was practically unused due to the problem of home PLMN to verify the reported charging information about the usage of data transmission in visited PLMN, so in practice, only the implementation of the Home Routed (HR) model is encountered. As UAVs, while roaming, may require safe and dedicated communication channels both within the country of operation and to the home country, the mixed LBO/HR architecture may be necessary to be supported with either LBO or HR network slices (e.g., to visited and home UTM, respectively). Special focus should be paid to the problem of cross-border flights, where the continuity of flight control/traffic management, exchange of geofencing tokens, etc., must take place while simultaneously changing (re-selecting and re-registering) the area-specific UTMs and PLMNs. These problems have been described in detail together with proposed solutions in [55], but they are not addressed in the standardization yet.
- Integrated UTM and PLMN interconnect architecture—the deep integration of UTMs and PLMNs, especially the joint authentication and authorization procedures (UUAA-MM, UUAA-SM), imposes the need to develop an effective interconnected architecture. While in the case of national roaming, the number of direct interactions between different UTMs and PLMNs operating in the same area is reasonable, in the case of international roaming of UAVs, there will appear interactions between visited and home UTMs/PLMNs. Hence the number of potential bilateral interactions becomes unmanageable. The E2E joint authentication and authorization procedures involving UTM and PLMN in the home country, providing the proof of UAV network and air domains identity, as well as the ones hosting the UAV in the visited country, should be agreed between the UAS and telecommunications Standards Developing Organizations to optimize the interconnect architecture.
- Lack of E2E security mechanisms—5GS has a rich set of security mechanisms that can be used for data ciphering, integrity protection, and authentication of nodes as well as UEs. It is also possible to interact securely with other PLMNs and integrate non-3GPP access securely. The security mechanisms of 5GS cannot be, however, extended beyond the N6 interface, i.e., for the interconnection with external DNs. This problem has been partly resolved by additional authentication mechanisms described in Section 4, but a generic mechanism for providing harmonizing security with external data networks and service platforms is needed.
- Lack of real E2E slices—the slices offered by MNOs extend as far as the UPF termination point in DN, meaning that the QoS, as well as security measures, cannot be ensured in the E2E manner as the operator does not control the in-DN routing policies. This issue is especially important in the context of low latency and critical communication, such as C2, where the risk of QoS validation is high and can impact the safety of UAV operations. Moreover, the ensured by 5GS, non-repudiation of data, data integrity, the confidentiality of identities, and other features of interest to UAS are also not guaranteed. To mitigate the mentioned threats, PLMN should reach the USSP services’ hosting environment. Alternatively, the PLMNs can host the USSP services on the operator’s premise to maintain full control over transmission performance and security.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| 3GPP | 3rd Generation Partnership Project |
| 4G | 4th Generation |
| 5G | 5th Generation |
| 5G-EIR | 5G-Equipment Identity Register |
| 5GC | 5G Core |
| 5GS | 5G System |
| AF | Application Function |
| AMF | Access and Mobility Management Function |
| ANSP | Air Navigation Service Provider |
| API | Application Programming Interface |
| ATC | Air Traffic Control |
| ATM | Air Traffic Management |
| AUSF | Authentication Server Function |
| BVLOS | Beyond Visual Line of Sight |
| C2 | Command and Control |
| CAPIF | Common Application Programming Interface Framework |
| CIS | Common Information Service |
| CN | Core Network |
| CP | Control Plane |
| D2D | Device to Device |
| DN | Data Network |
| DOP | Drone Operator |
| E2E | End-to-End |
| eMBB | Enhanced Mobile Broadband |
| EPC | Evolved Packet Core |
| EU | European Union |
| FPV | First Person View |
| GCS | Ground Control Station |
| GMLC | Gateway Mobile Location Centre |
| HMTC | High-Performance Machine-Type Communications |
| HR | Home Routed |
| LBO | Local Break-Out |
| LCS | Location Services |
| LMF | Location Management Function |
| LTE | Long Term Evolution |
| MIMO | Multiple Input Multiple Output |
| mMTC | Massive Machine Type Communications |
| MNO | Mobile Network Operator |
| NEF | Network Exposure Function |
| NF | Network Function |
| NR | New Radio |
| NRF | Network Repository Function |
| NS | Network Slicing |
| NSSF | Network Slice Selection Function |
| NWDAF | Network Data Analytics Function |
| O-RAN | Open RAN |
| PCF | Policy and Charging Function |
| PLMN | Public Land Mobile Network |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| SBA | Service-Based Architecture |
| SCEF | Service Capability Exposure Function |
| SEAL | Service Enabler Architecture Layer for Verticals |
| SMF | Session Management Function |
| TPAE | Third Party Authorized Entity |
| UAS | Unmanned Aircraft System |
| UAS | NF Unmanned Aviation System Network Function |
| UAV | Unmanned Aerial Vehicle |
| UCC | U-space Coverage Correlation |
| UDM | Unified Data Management |
| UE | User Equipment |
| UP | User Plane |
| UPF | User Plane Function |
| URLLC | Ultra-Reliable Low-Latency Communication |
| USSP | U-space Service Provider |
| UTM | Unmanned Aircraft Systems Traffic Management |
| UUAA | USS UAV Authentication & Authorization |
| UUAA-MM | UUAA Mobility Management |
| UUAA-SM | UUAA Session Management |
| V2X | Vehicle to Everything |
| VLOS | Visual Line of Sight |
References
- Markets and Markets. Unmanned Aerial Vehicle (UAV) Market by Point of Sale, Systems, Platform (Civil & Commercial, and Defense & Governement), Function, End Use, Application, Type, Mode of Operation, MTOW, Range, and Region (2021–2026). Available online: https://www.marketsandmarkets.com/Market-Reports/unmanned-aerial-vehicles-uav-market-662.html (accessed on 4 July 2022).
- Zipline. Zipline Delivers 1 Million COVID-19 Vaccines in Ghana. Available online: https://flyzipline.com/press/zipline-delivers-1-million-covid-19-vaccines-in-ghana (accessed on 4 July 2022).
- Edwards, D. UPS to Use Drones to Deliver Medicines to Retirement Homes in Florida. Available online: https://roboticsandautomationnews.com/2020/05/26/ups-to-use-drones-to-deliver-medicines-to-retirement-homes-in-florida/32453/ (accessed on 4 July 2022).
- Koetsier, J. Drone Delivery Is Here. Right Now. Live. For Real. and It’s Awesome. Available online: https://johnkoetsier.com/drone-delivery-is-here-right-now-live-for-real-and-its-awesome/ (accessed on 4 July 2022).
- Duncan, I. Virginia Town Becomes Home to Nation’s First Drone Package Delivery Service. Available online: https://www.washingtonpost.com/local/trafficandcommuting/virginia-town-becomes-home-to-nations-first-drone-package-delivery-service/2019/10/19/4b777d24-f1ff-11e9-89eb-ec56cd414732_story.html (accessed on 4 July 2022).
- Ren, L.; Castillo-Effen, M. Air Traffic Management (ATM) Operations: A Review; Report 2017GRC0222; GE Global Research: Niskayuna, NY, USA, 2017. [Google Scholar]
- GUTMA. UAS Traffic Management Architecture; Report Ver. 1.0; Global UTM Association: Lausanne, Switzerland, 2017. [Google Scholar]
- The Concept of Operations for European Unmanned Traffic Management (UTM) Systems (CORUS). Available online: https://www.sesarju.eu/projects/corus (accessed on 4 July 2022).
- A European UTM Testbed for U-Space—EuroDRONE. Available online: https://www.sesarju.eu/node/3202 (accessed on 4 July 2022).
- Proving Operations of Drones with Initial UTM—PODIUM. Available online: https://www.sesarju.eu/projects/podium (accessed on 4 July 2022).
- Finnish-Estonian “Gulf of Finland” Very Large U-Space Demonstration—GOF USPACE. Available online: https://www.sesarju.eu/node/3203 (accessed on 4 July 2022).
- GOF 2.0 Integrated Urban Airspace Validation. Available online: https://gof2.eu/project (accessed on 4 July 2022).
- European Commission. Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the rules and procedures for the operation of unmanned aircraft (Text with EEA relevance). Off. J. Eur. Union 2019, L 152, 45–71. [Google Scholar]
- SESAR Joint Undertaking. U-space Blueprint. In Brochure, Single European Sky ATM Research Joint Undertaking; European Union: Maastricht, The Netherlands, 2017. [Google Scholar] [CrossRef]
- European Commission. Commission Implementing Regulation (EU) 2020/639 of 12 May 2020 amending Implementing Regulation (EU) 2019/947 as regards standard scenarios for operations executed in or beyond the visual line of sight (Text with EEA relevance). Off. J. Eur. Union 2020, L 150, 1–31. [Google Scholar]
- European Commission. Commission Implementing Regulation (EU) 2021/664 of 22 April 2021 on a regulatory framework for the U-space (Text with EEA relevance). Off. J. Eur. Union 2021, L 139, 161–183. [Google Scholar]
- European Commission. Commission Implementing Regulation (EU) 2021/666 of 22 April 2021 amending Regulation (EU) No 923/2012 as regards requirements for manned aviation operating in U-space airspace (Text with EEA relevance). Off. J. Eur. Union 2021, L 139, 187–188. [Google Scholar]
- European Commission. Commission Implementing Regulation (EU) 2021/665 of 22 April 2021 amending Implementing Regulation (EU) 2017/373 as regards requirements for providers of air traffic management/air navigation services and other air traffic management network functions in the U-space airspace designated in controlled airspace (Text with EEA relevance). Off. J. Eur. Union 2021, L 139, 184–186. [Google Scholar]
- CORUS Consortium. Deliverable D6.3: Concept Of Operations For European UTM Systems, Final Version; Report 03.00.02; Single European Sky ATM Research Joint Undertaking: Brussels, Belgium, 2019. [Google Scholar]
- JARUS. JARUS Guidelines on Specific Operations Risk Assessment (SORA), 2nd ed.; Report JAR-DEL-WG6-D.04; Joint Authorities for Rulemaking of Unmanned Systems: Pittsburgh, PA, USA, 2019; Available online: http://jarus-rpas.org/sites/jarus-rpas.org/files/jar_doc_06_jarus_sora_v2.0.pdf (accessed on 4 July 2022).
- PJ34 Aura: ATM U-Space Interface. Available online: https://www.pj34aura.com/project (accessed on 4 July 2022).
- Egis, E.A. Military and U-Space: Guidelines. D1—U-Space Evaluation; Report 1.0; European Defence Agency: Brussels, Belgium, 2021. [Google Scholar]
- 3GPP. TS 22.125: Unmanned Aerial System (UAS) Support in 3GPP; Ver. 17.6.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- ACJA. Interface for Data Exchange between MNOs and the UTM Ecosystem: NetworkCoverage Service Definition v1.00; Technical Report ver. 1.0; GSM Association: London, UK, 2021; Available online: https://www.gsma.com/iot/wp-content/uploads/2021/02/ACJA-NetworkCoverage-Service-Definition-v1.00.pdf (accessed on 4 July 2022).
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021. [Google Scholar] [CrossRef]
- Mozaffari, M.; Lin, X.; Hayes, S. Toward 6G with Connected Sky: UAVs and Beyond. IEEE Commun. Mag. 2021, 59, 74–80. [Google Scholar] [CrossRef]
- Mishra, D.; Natalizio, E. A survey on cellular-connected UAVs: Design challenges, enabling 5G/B5G innovations, and experimental advancements. Comput. Netw. 2020, 182, 107451. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, J.; Zeng, Y.; Ng, D.W.K.; Al-Dhahir, N.; Schober, R.; Swindlehurst, A.L. A Comprehensive Overview on 5G-and-Beyond Networks with UAVs: From Communications to Sensing and Intelligence. IEEE J. Sel. Areas Commun. 2020, 39, 2912–2945. [Google Scholar] [CrossRef]
- Si-Mohammed, S.; Bouaziz, M.; Hellaoui, H.; Bekkouche, O.; Ksentini, A.; Taleb, T.; Tomaszewski, L.; Lutz, T.; Srinivasan, G.; Jarvet, T.; et al. Supporting Unmanned Aerial Vehicle Services in 5G Networks: New High-Level Architecture Integrating 5G With U-space. IEEE Vehicular Technol. Mag. 2021, 16, 57–65. [Google Scholar] [CrossRef]
- Kainrath, K.; Gruber, M.; Hinze, A.; Fluehr, H.; Leitgeb, E. Towards Unmanned Aerial Vehicle UTM-integration using mobile radio networks. In Proceedings of the 2022 45th Jubilee International Convention on Information, Communication and Electronic Technology (MIPRO), Opatija, Croatia, 27–23 May 2022; pp. 465–469. [Google Scholar] [CrossRef]
- Bin Li, Z.F.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things 2019, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- NRG-5 Project. Available online: http://www.nrg5.eu (accessed on 4 July 2022).
- 5G!Drones: Unmanned Aerial Vehicle Vertical Applications’ Trials Leveraging Advanced 5G Facilities. Available online: https://5gdrones.eu (accessed on 4 July 2022).
- 3GPP. TS 23.501: System Architecture for the 5G System (5GS); Ver. 17.5.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 28.533: Management and Orchestration; Architecture Framework; Ver. 17.2.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 23.273: 5G System (5GS) Location Services (LCS); Stage 2; Ver. 17.5.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 23.222: Common API Framework for 3GPP Northbound APIs; Ver. 17.6.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 23.434: Service Enabler Architecture Layer for Verticals (SEAL); Functional Architecture and Information Flows; Ver. 18.1.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 23.256: Support of Uncrewed Aerial Systems (UAS) Connectivity, Identification and Tracking; Stage 2; Ver. 17.3.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 38.300: NR; NR and NG-RAN Overall Description; Stage-2; Ver. 17.0.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 38.305: NG Radio Access Network (NG-RAN); Stage 2 Functional Specification of User Equipment (UE) Positioning in NG-RAN; Ver. 17.0.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TS 23.502: Procedures for the 5G System (5GS); Stage 2; Ver. 17.5.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP Release 17 Scope and Timeline. Available online: https://www.3gpp.org/release-17 (accessed on 4 July 2022).
- 3GPP Release 18 Scope and Timeline. Available online: https://www.3gpp.org/release18 (accessed on 4 July 2022).
- 3GPP. TS 23.255: Application Layer Support for Uncrewed Aerial System (UAS); Functional Architecture and Information Flows; Ver. 17.3.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2022. [Google Scholar]
- 3GPP. TR 23.754: Study on Supporting Unmanned Aerial Systems (UAS) Connectivity, Identification and Tracking; Ver. 17.1.0; 3rd Generation Partnership Project: Sophia Antipolis, France, 2021. [Google Scholar]
- 5G HarmoniseD Research and TrIals for serVice Evolution between EU and China (5G-DRIVE): Deliverable D4.4: Final Report of V2X Trials. Available online: https://5g-drive.eu/wp-content/uploads/2021/08/5GD-D4.4_Final-report-of-V2X-trials.pdf (accessed on 4 July 2022).
- ETSI. GS MEC 021: Multi Access Edge Computing (MEC); Application Mobility Service API; V2.1.1; European Telecommunications Standards Institute: Sophia Antipolis, France, 2020. [Google Scholar]
- Sollfrank, M.; Loch, F.; Denteneer, S.; Vogel-Heuser, B. Evaluating Docker for Lightweight Virtualization of Distributed and Time-Sensitive Applications in Industrial Automation. IEEE Trans. Ind. Inform. 2021, 17, 3566–3576. [Google Scholar] [CrossRef]
- Oljira, D.B.; Brunstrom, A.; Taheri, J.; Grinnemo, K.J. Analysis of Network Latency in Virtualized Environments. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kukliński, S.; Kołakowski, R. A New Approach to 5G and MEC Integration. Artificial Intelligence Applications and Innovations. In Proceedings of the AIAI 2020 IFIP WG 12.5 International Workshops, Neos Marmaras, Greece, 5–7 June 2020; Maglogiannis, I., Iliadis, L., Pimenidis, E., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 15–24. [Google Scholar] [CrossRef]
- Kukliński, S.; Tomaszewski, L.; Korzec, P.; Kołakowski, R. 5G-UASP: 5G-based multi-provider UAV platform architecture. In Proceedings of the 2020 6th IEEE Conference on Network Softwarization (NetSoft), Ghent, Belgium, 29 June–3 July 2020; pp. 242–246. [Google Scholar] [CrossRef]
- O-RAN Alliance. O-RAN Use Cases and Deployment Scenarios; White paper; Open RAN Alliance: Alfter, Germany, 2020. [Google Scholar]
- Kukliński, S.; Tomaszewski, L.; Kołakowski, R. On O-RAN, MEC, SON and Network Slicing integration. In Proceedings of the 2020 IEEE Globecom Workshops (GC Wkshps), Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Tomaszewski, L.; Kołakowski, R.; Korzec, P. On 5G Support of Cross-Border UAV Operations. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tomaszewski, L.; Kołakowski, R.; Dybiec, P.; Kukliński, S. Mobile Networks’ Support for Large-Scale UAV Services. Energies 2022, 15, 4974. https://doi.org/10.3390/en15144974
Tomaszewski L, Kołakowski R, Dybiec P, Kukliński S. Mobile Networks’ Support for Large-Scale UAV Services. Energies. 2022; 15(14):4974. https://doi.org/10.3390/en15144974
Chicago/Turabian StyleTomaszewski, Lechosław, Robert Kołakowski, Piotr Dybiec, and Sławomir Kukliński. 2022. "Mobile Networks’ Support for Large-Scale UAV Services" Energies 15, no. 14: 4974. https://doi.org/10.3390/en15144974