Direct Model Reference Adaptive Control of a Boost Converter for Voltage Regulation in Microgrids




Abstract
:1. Introduction
- An adaptive controller is designed to regulate the output voltage of the DC–DC converters in an isolated MG system.
- This paper proposes a DMRAC that can adjust the parameters of the PID controller in real-time to ensure that the actual system is following the desired reference model.
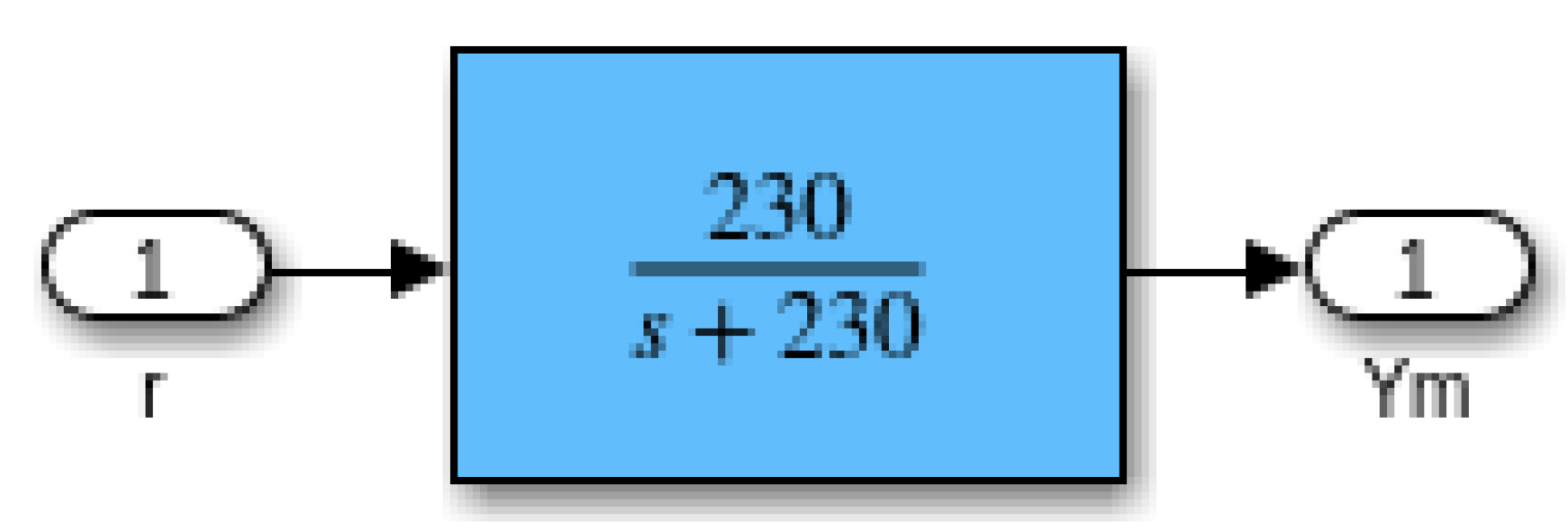
- The PID controller regulates the output voltage at a fixed level, essential for correct power injection when the DC–DC boost converter is connected to the MG. The outer loop implements the MIT rule for a model reference adaptive control. Besides, no training or database is needed in this method.
- The proposed controller does not require using any current sensor, and the control scheme is only obtained using the voltage feedback of the boost converter. So, the proposed design is cost-effective.
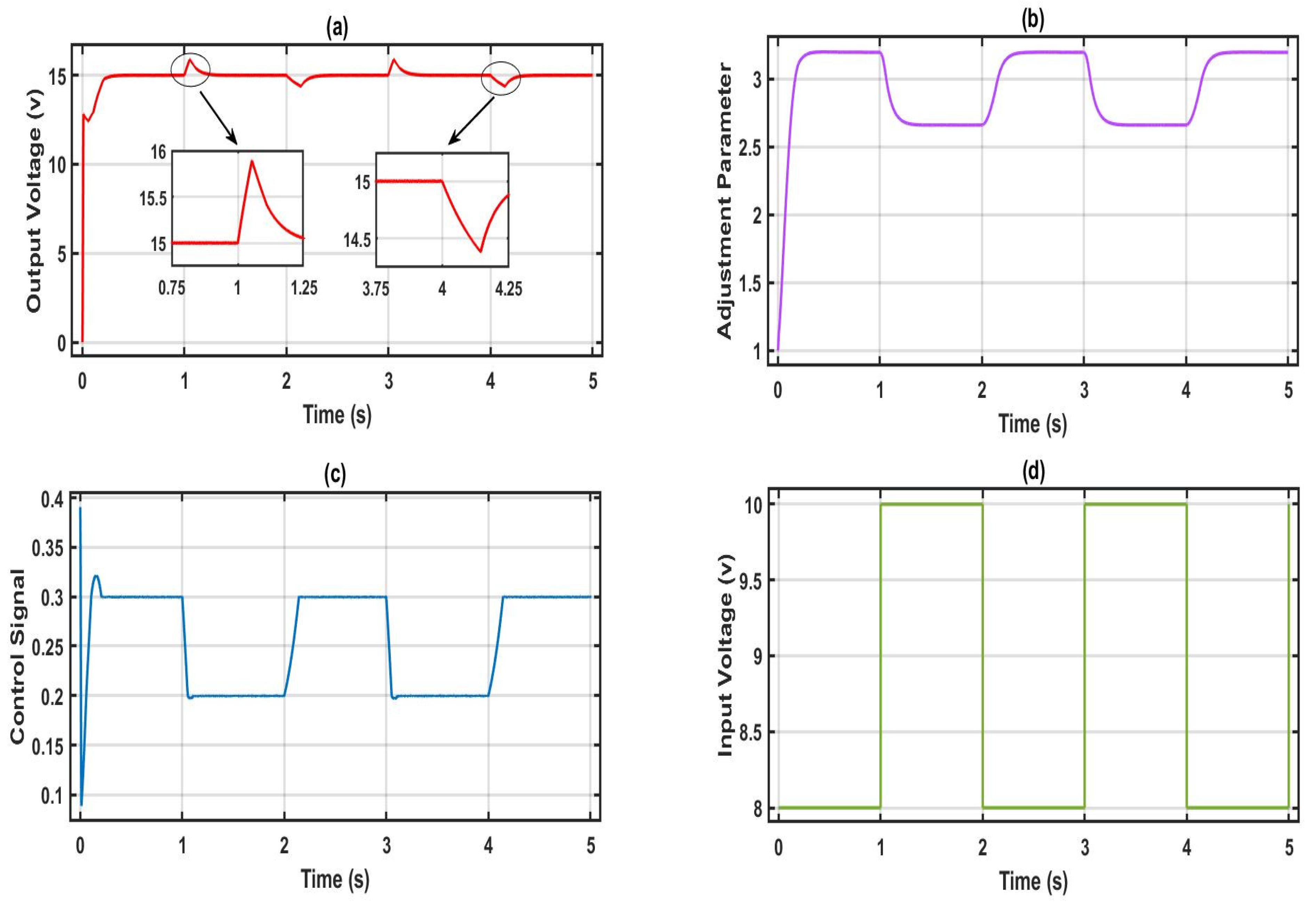
- The proposed controller’s effectiveness and robustness are validated through simulation and hardware implementation when subjected to load variations, input voltage changes, and reference voltage changes.
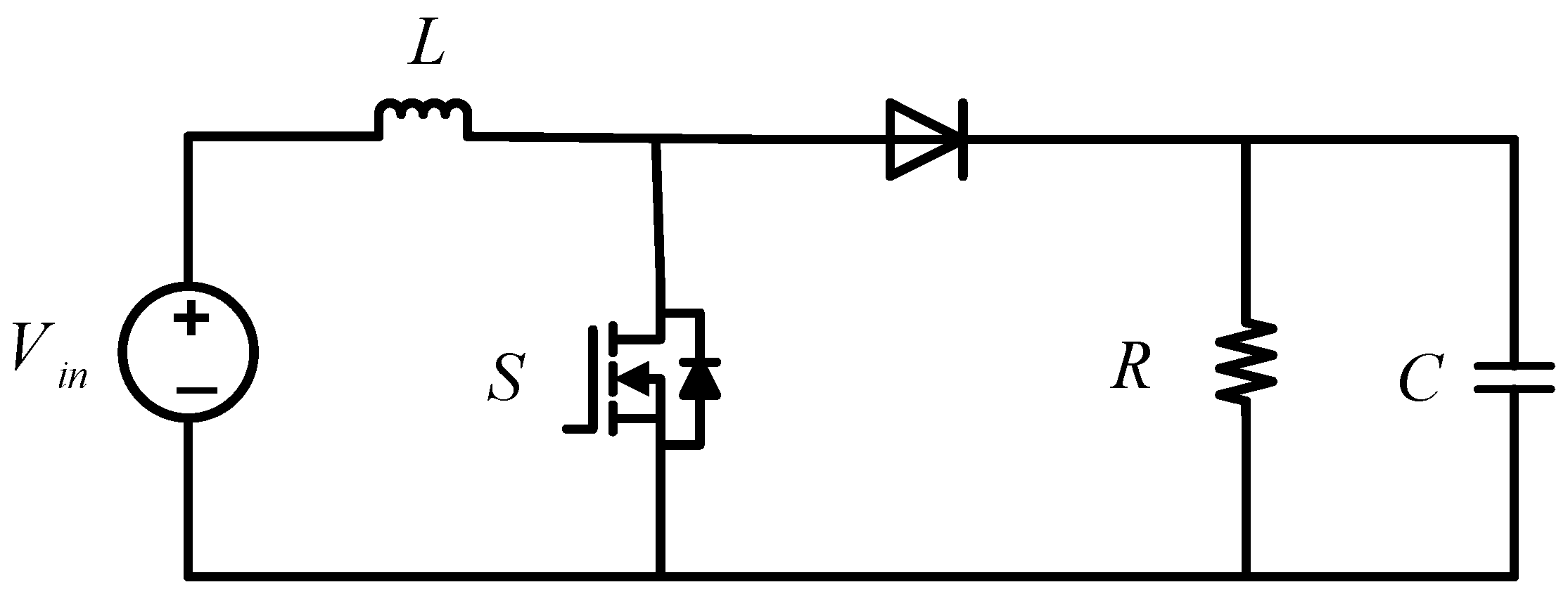
2. DC–DC Converter Dynamic Modelling
2.1. Ideal Dynamic Model
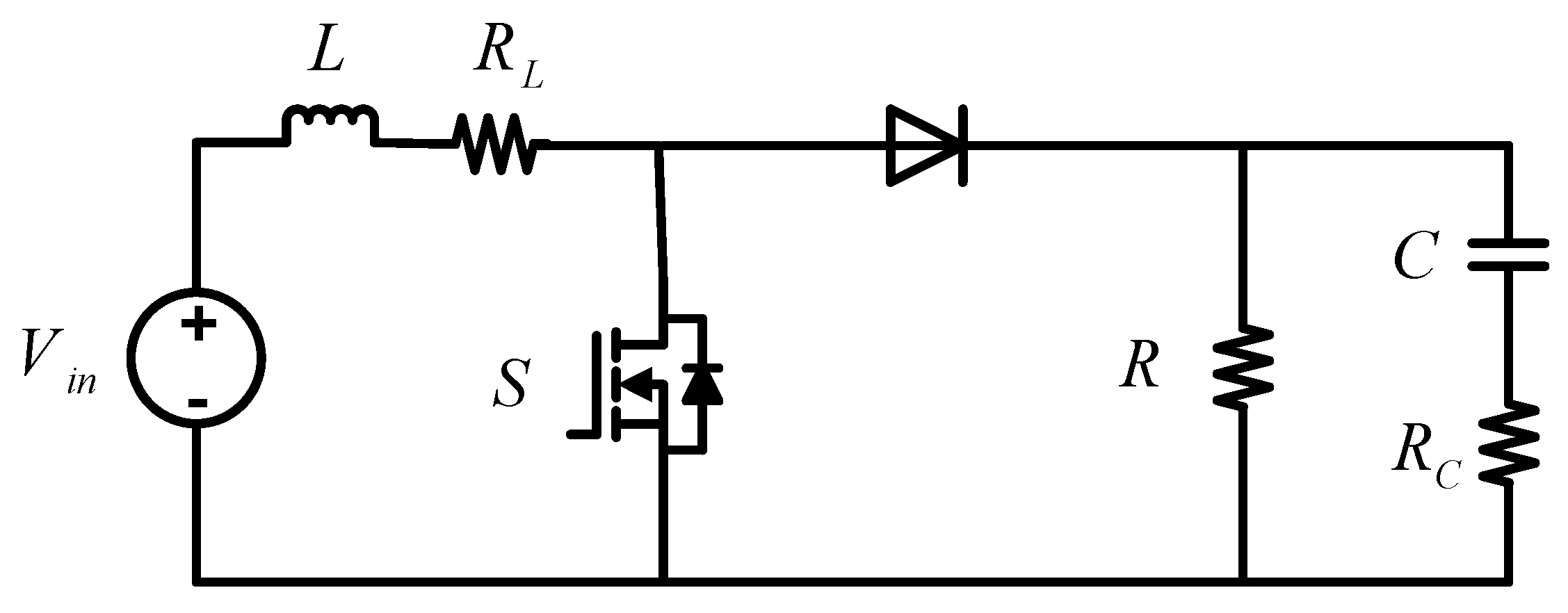
2.2. Parasitic Realisation in Boost Converter Dynamic Model
3. Controller Design and Simulation
3.1. Model Reference Adaptive Controller
3.2. Stability and Robustness Analysis
3.3. Simulation Results
3.4. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Maneesh, K.; Barjeev, T. A state of art review of microgrid control and integration aspects. In IEEE International Conference IICPE, Proceedings of the 2016 7th India International Conference on Power Electronics (IICPE), Patiala, India, 17–19 November 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Zakir, M.; Arshad, A.; Sher, H.A.; Lehtonen, M. An Optimal Power Management System Based on Load Demand and Resources Availability for PV Fed DC-Microgrid with Power-Sharing among Multiple Nanogrids. In Proceedings of the 2021 IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Espoo, Finland, 18–21 October 2021; pp. 1–5. [Google Scholar]
- Zakir, M.; Sher, H.A.; Arshad, A.; Lehtonen, M. A fault detection, localization, and categorization method for PV fed DC-microgrid with power-sharing management among the nano-grids. Int. J. Electr. Power Energy Syst. 2022, 137, 107858. [Google Scholar] [CrossRef]
- Forouzesh, M.; Siwakoti, Y.P.; Gorji, S.A.; Blaabjerg, F.; Lehman, B. A survey on voltage boosting techniques for step-up DC-DC converters. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Mamarelis, E.; Petrone, G.; Spagnuolo, G. Design of a sliding mode controlled SEPIC for PV MPPT applications. IEEE Trans. Ind. Electron. 2014, 61, 3387–3398. [Google Scholar] [CrossRef]
- Yanarates, C.; Zhou, Z. Design and Cascade PI Controller-Based Robust Model Reference Adaptive Control of DC-DC Boost Converter. IEEE Access 2022, 10, 44909–44922. [Google Scholar] [CrossRef]
- Young, M. The Technical Writer’s Handbook; University Science: Mill Valley, CA, USA, 1989. [Google Scholar]
- Rajakumari, R.F.; Deshpande, M. Comparative Analysis of DC-DC Converters. In Proceedings of the 2nd International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 21–23 August 2019; pp. 504–509. [Google Scholar]
- Zaitu, R. Voltage Mode Boost Converter Small Signal Control Loop Analysis Using the TPS61030; Application Report; Texas Instruments: Dallas, TX, USA, 2007. [Google Scholar]
- Perry, A.G.; Feng, G.; Liu, Y.F.; Sen, P.C. A design method for PI-like fuzzy logic controller for DC-DC converter. IEEE Trans. Ind. Electron. 2007, 54, 2688–2695. [Google Scholar] [CrossRef]
- Aldo, B.; Corsanini, D.; Landi, A.; Sani, L. Circle based Criteria for performance evaluation of controlled DC-DC Switching Converters. IEEE Trans. Ind. Electron. 2006, 53, 1862–1869. [Google Scholar]
- Zhang, J.; Shu-Hung Chung, H.; Lo, W.L.; Ron Hui, S.Y. Implementation technique for design of switching Regulators Using Genetic Algorithm. IEEE Trans. Power Electron. 2001, 16, 752–763. [Google Scholar] [CrossRef] [Green Version]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable structure control: A survey. IEEE Trans. Ind. Electron. 1993, 40, 2–22. [Google Scholar] [CrossRef] [Green Version]
- Tang, K.L.; Mulholland, R.J. Comparing Fuzzy logic with classical controller design. IEEE Trans. Syst. Man Cybern. 1987, 6, 1085–1087. [Google Scholar] [CrossRef]
- Nelms, R.M.; Guo, L.; Hung, J.H. Digital Controller design for Buck and Boost Converters Using Root Locus Technique. In Proceedings of the 29th Annual Conference of the IEEE Industrial Electronics Society, Roanoke, VA, USA, 2–6 November 2003; Volume 2, pp. 1864–1869. [Google Scholar]
- Rashid, U.; Jamil, M.; Gilani, S.O.; Niazi, I.K. LQR based Training of Adaptive Neuro-Fuzzy Controller. In Proceedings of the 25th Italian Workshop on Neural Networks, Salerno, Italy, 20–22 May 2015; pp. 311–322. [Google Scholar]
- Schmidt, S.; Richter, M.; Oberrath, J.; Mercorelli, P. Control oriented modeling of DCDC converters. IFAC-Pap. Line 2018, 51, 331–336. [Google Scholar] [CrossRef]
- Kumar, M.; Tyagi, B. Design of A Model Reference Adaptive Controller (MRAC) for DC-DC Boost Converter for Variations in Solar Outputs using modified MIT Rule in an Islanded Microgrid. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar]
- Raj, R.N.; Purushothaman, K.V.; Singh, N.A. Adaptive TSK-type neural fuzzy controller for boost DC-DC converter. In Proceedings of the 2017 IEEE International Conference on Circuits and Systems (ICCS), Thiruvananthapuram, India, 20–21 December 2017; pp. 441–446. [Google Scholar]
- Awais, M.; Khan, L.; Ahmad, S.; Jamil, M. Feedback-Linearization-Based Fuel-Cell Adaptive-Control Paradigm in a Microgrid Using a Wavelet-Entrenched Neuro-Fuzzy Framework. Energies 2021, 14, 1850. [Google Scholar] [CrossRef]
- Lyapunov, A.M. The General Problem of the Stability of Motion. Ph.D. Thesis, University Kharkov, Kharkiv, Ukraine, 1892. (In Russian). [Google Scholar]
- Ibrahim, O.; Yahaya, N.Z.; Saad, N. Comparative studies of PID controller tuning methods on a DC-DC boost converter. In Proceedings of the International Conference on Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 15–17 August 2016; pp. 1–5. [Google Scholar]
- Liu, S.; Liu, X.; Jiang, S.; Zhao, Z.; Wang, N.; Liang, X.; Zhang, M.; Wang, L. Application of an Improved STSMC Method to the Bidirectional DC–DC Converter in Photovoltaic DC Microgrid. Energies 2022, 15, 1636. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| Input voltage | |
| Capacitor voltage | |
| Inductor current | |
| Duty cycle | |
| The output of the reference model | |
| Plant output | |
| Plant input | |
| Second-order transfer function | |
| Known parameter | |
| Unknown parameter | |
| Adaptation gain |
| Device/Component | Model/Value |
|---|---|
| Arduino | Uno |
| Capacitor | |
| Inductor | |
| Load resistor | |
| Voltage divider resistors | |
| Mosfet | IRLZ44 N |
| Diode | In4004 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kahani, R.; Jamil, M.; Iqbal, M.T. Direct Model Reference Adaptive Control of a Boost Converter for Voltage Regulation in Microgrids. Energies 2022, 15, 5080. https://doi.org/10.3390/en15145080
Kahani R, Jamil M, Iqbal MT. Direct Model Reference Adaptive Control of a Boost Converter for Voltage Regulation in Microgrids. Energies. 2022; 15(14):5080. https://doi.org/10.3390/en15145080
Chicago/Turabian StyleKahani, Rasool, Mohsin Jamil, and M. Tariq Iqbal. 2022. "Direct Model Reference Adaptive Control of a Boost Converter for Voltage Regulation in Microgrids" Energies 15, no. 14: 5080. https://doi.org/10.3390/en15145080
APA StyleKahani, R., Jamil, M., & Iqbal, M. T. (2022). Direct Model Reference Adaptive Control of a Boost Converter for Voltage Regulation in Microgrids. Energies, 15(14), 5080. https://doi.org/10.3390/en15145080