
A Novel Electronic Wedge Brake Based on Active Disturbance Rejection Control


Abstract
:1. Introduction
- The selected input error value is unreasonable and will cause the system to overshoot or oscillate;
- PID controller cannot really solve the contradiction between fast and overshoot;
- The introduction of differential part is easy to cause system instability.
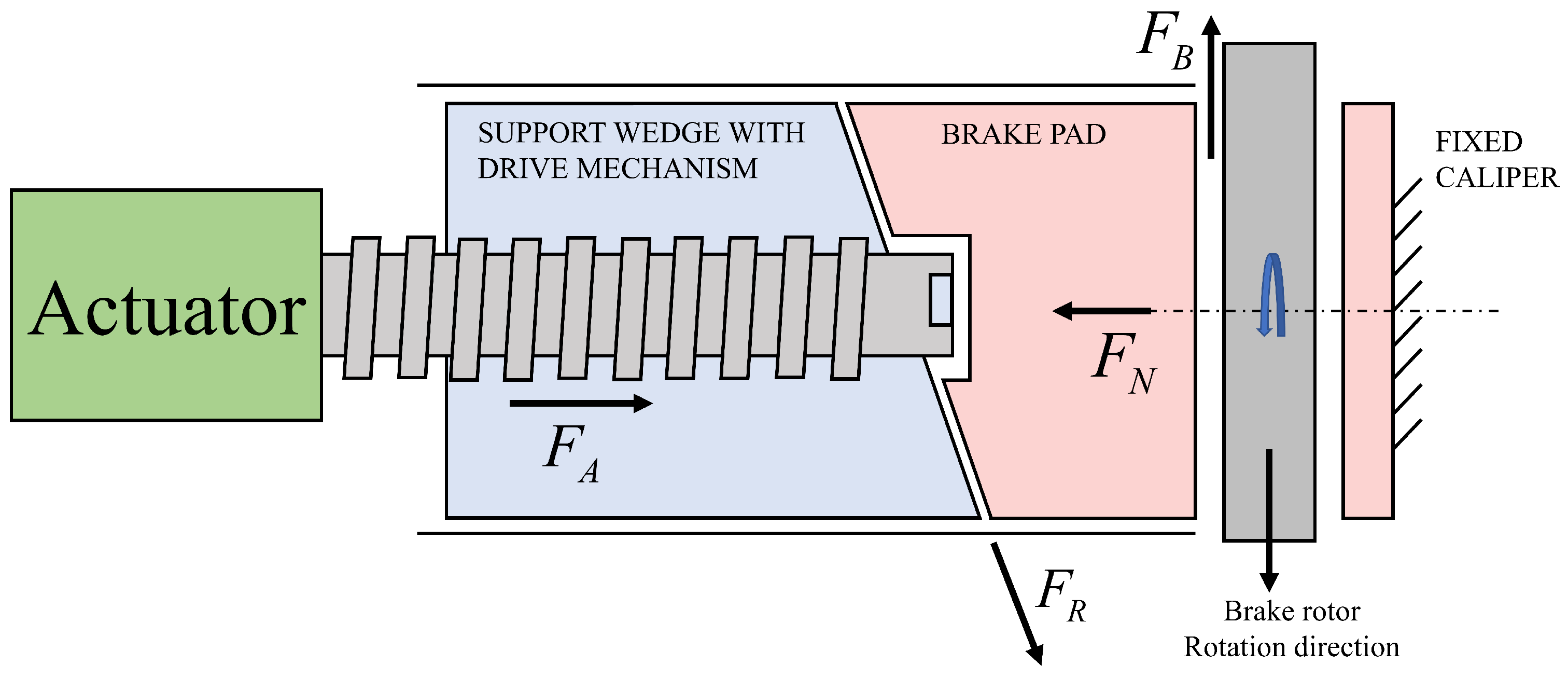
- Designed a novel simple EWB system without a planetary gear set or a ball screw mechanism. Only a screw, a wedge shape brake pad and a wedge plunger are needed. This effectively simplifies the complex mechanical structures;
- Introduced active disturbance rejection control (ADRC) into the proposed EWB model, which greatly increased the anti-interference ability of the proposed EWB system and faster response time;
- Provided a simple method to manage the air gap between the brake rotor and brake pads.
2. Materials and Methods
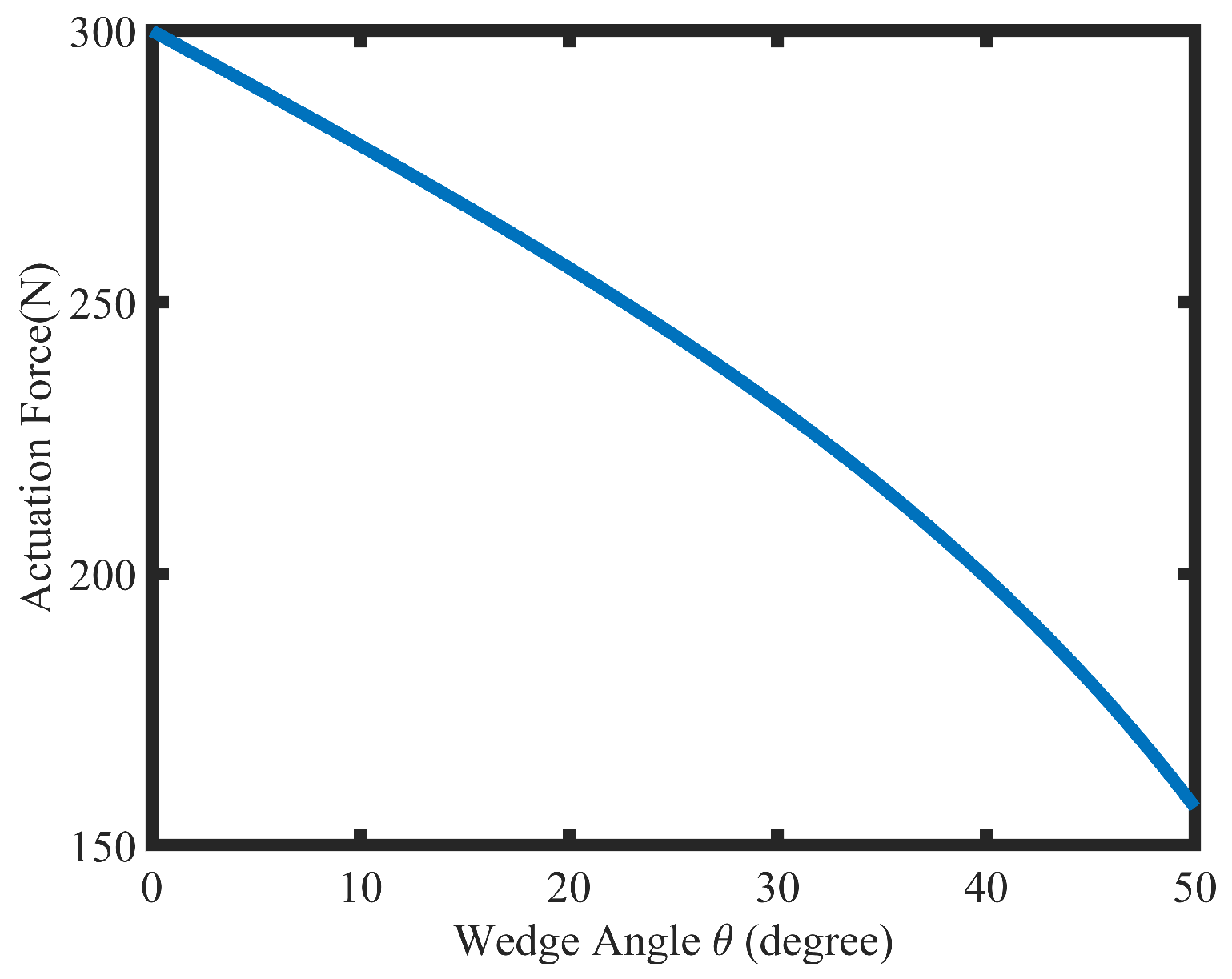
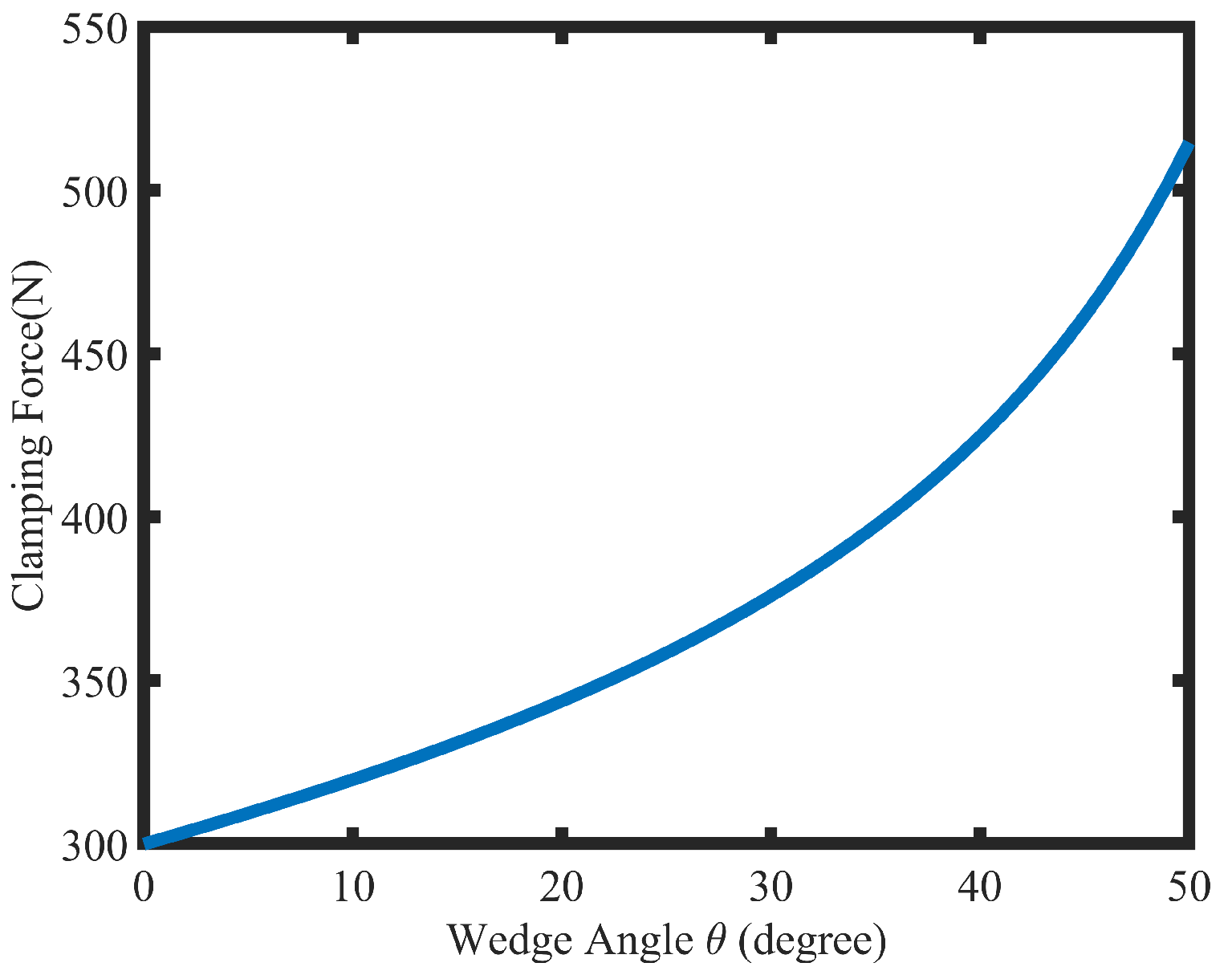
2.1. Wedge Mechanism
2.2. Force Transformation Mechanism
2.3. A Limit Switch and a Hybrid Stepper Motor
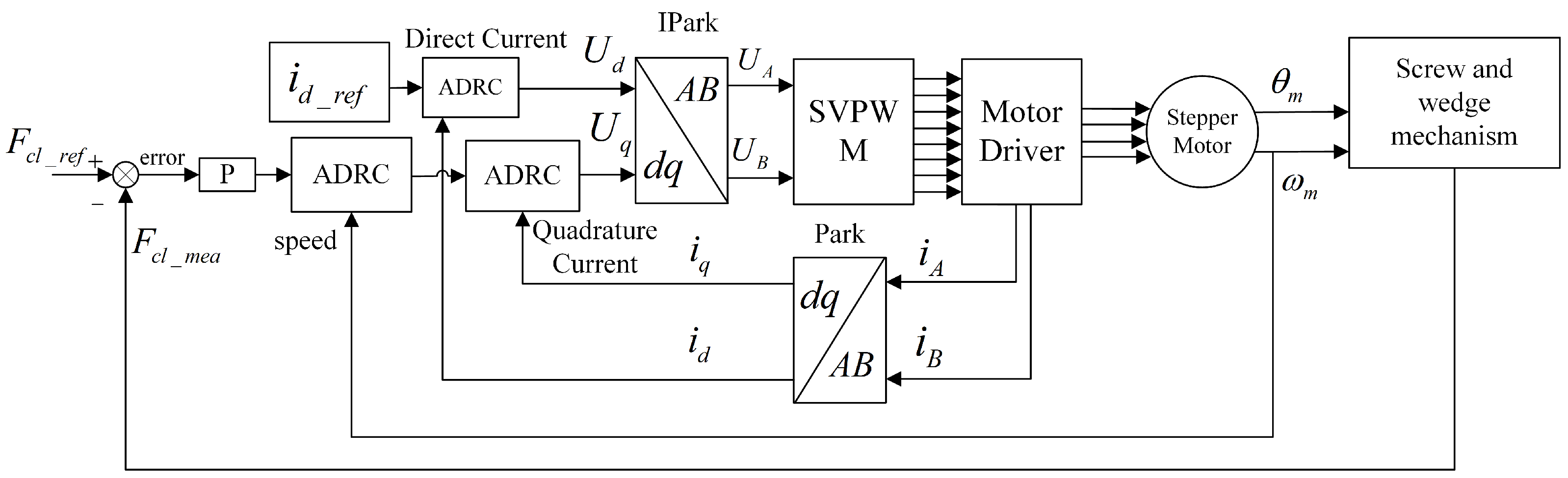
2.4. The Control Algorithm Design of the Proposed EWB System
3. Results and Discussion
3.1. Step Response of the Proposed EWB System
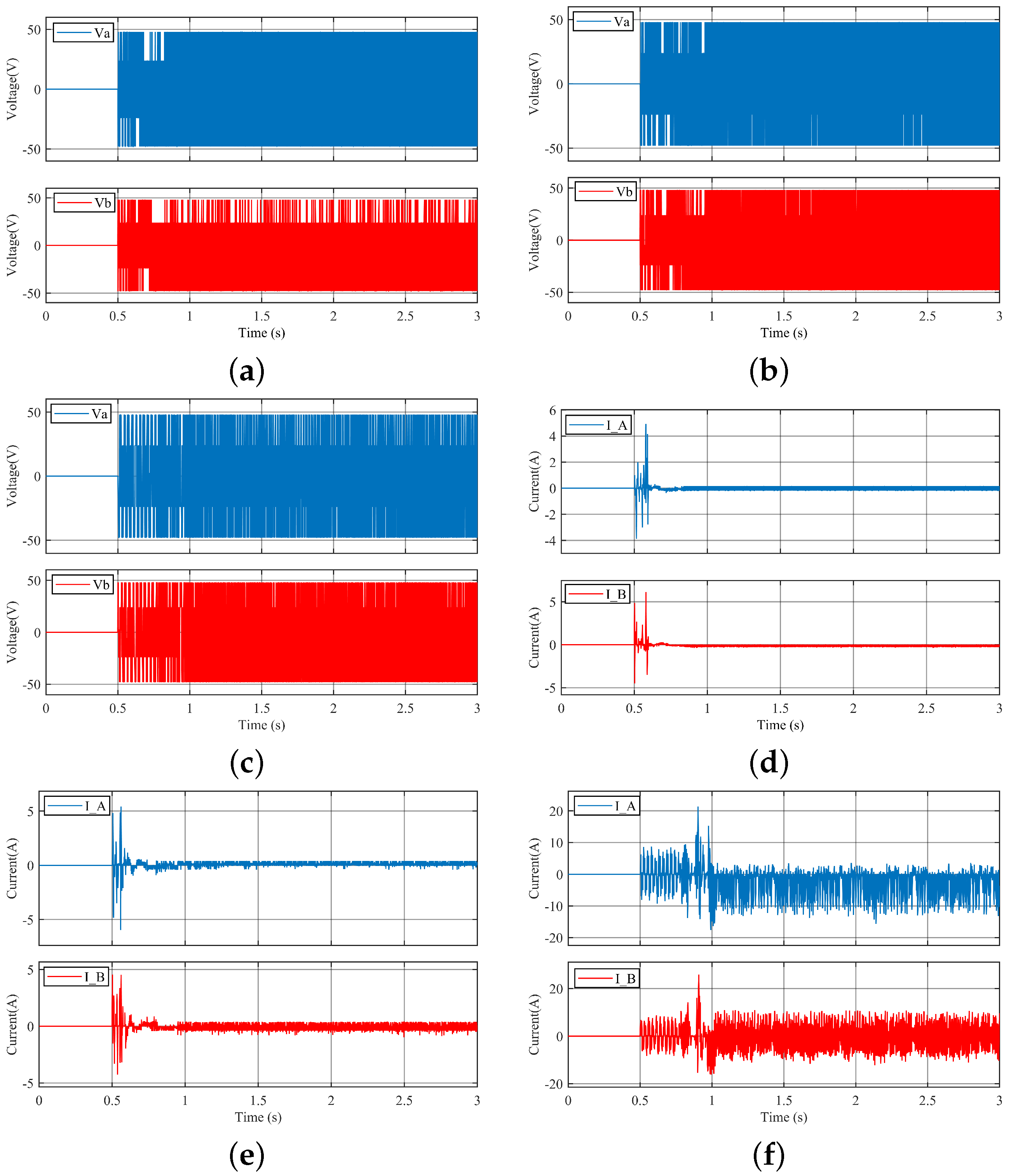
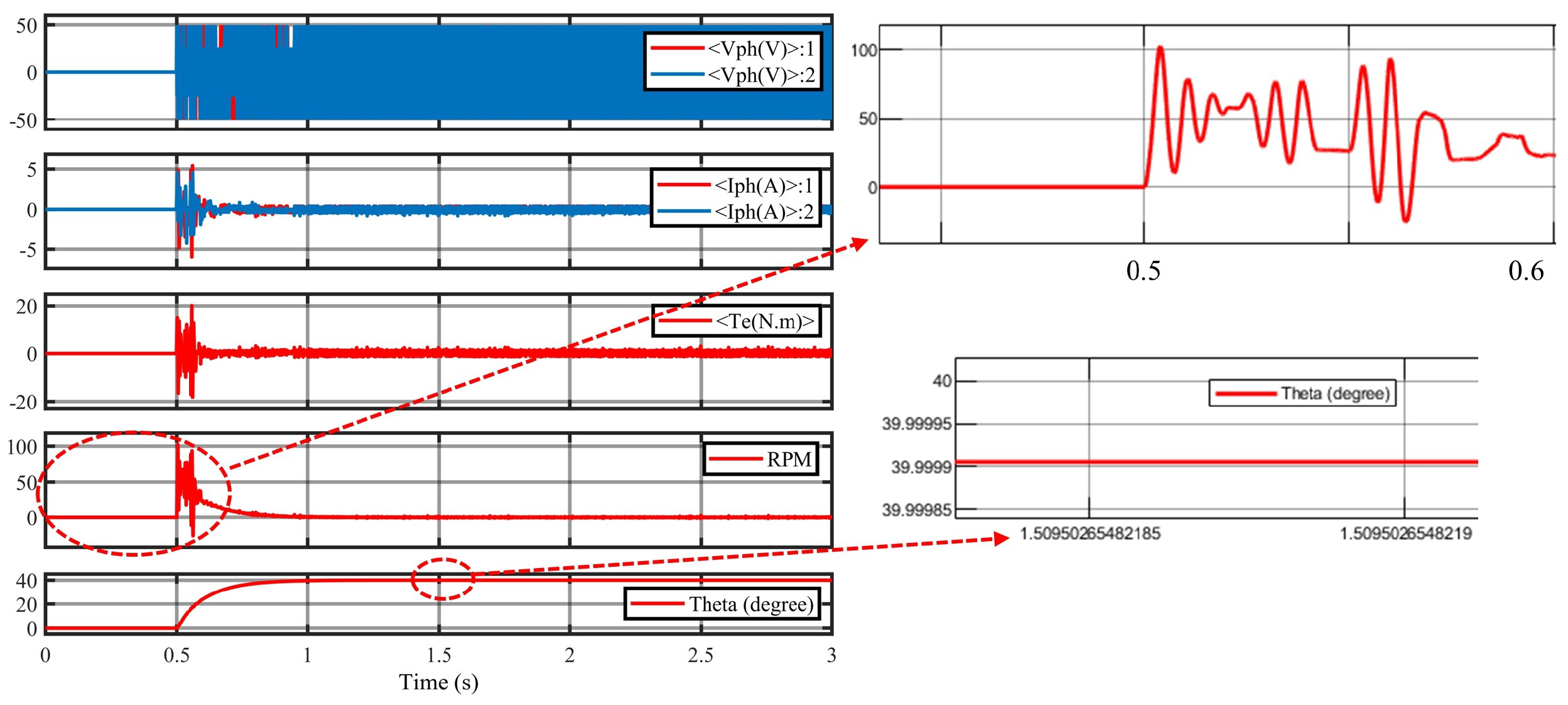
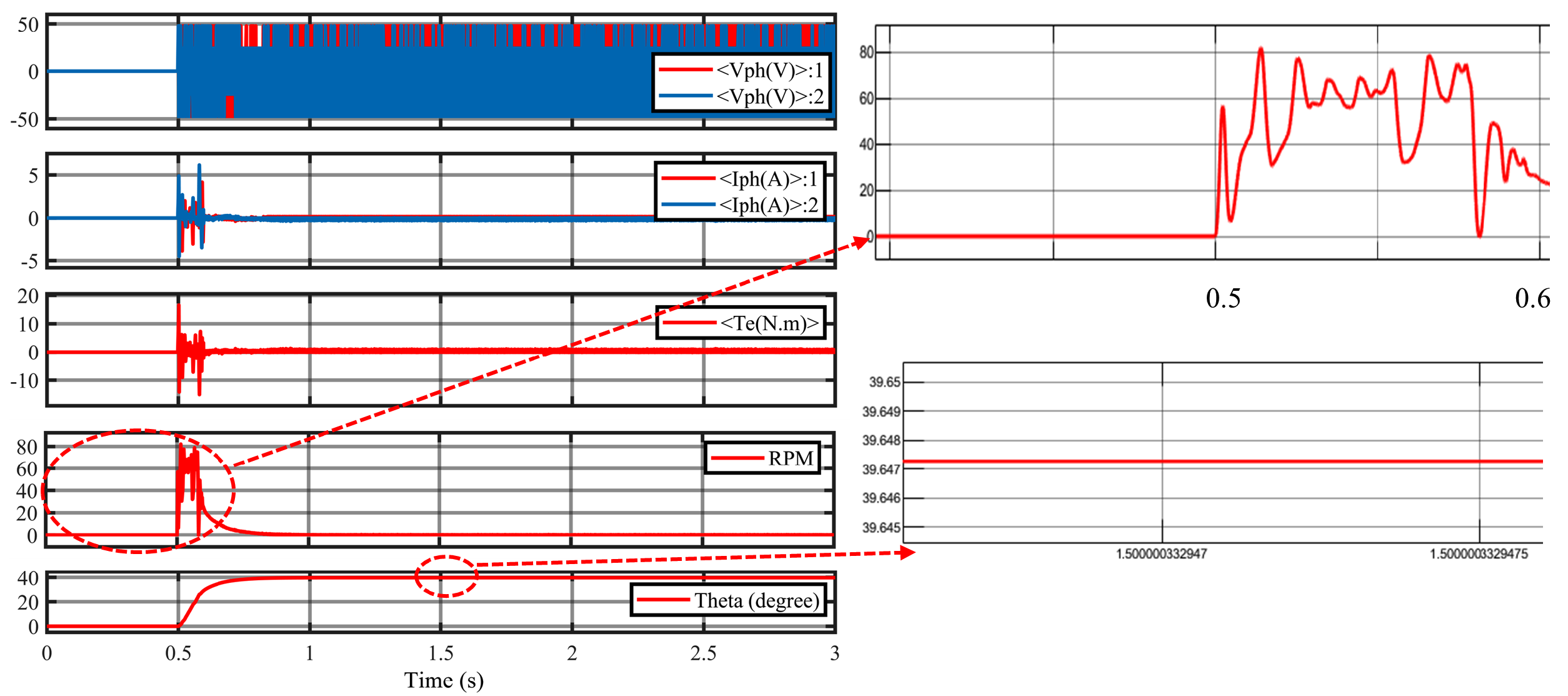
3.2. Simulation for a Vehicle
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schwarz, R.; Isermann, R.; Böhm, J.; Nell, J.; Rieth, P. Modeling and Control of an Electromechanical Disk Brake; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 1998. [Google Scholar]
- Hartmann, H.; Schautt, M.; Pascucci, A.; Gombert, B. eBrake®-the mechatronic wedge brake. In SAE Transactions; SAE: Warrendale, PA, USA, 2002; pp. 2146–2151. [Google Scholar]
- Roberts, R.; Schautt, M.; Hartmann, H.; Gombert, B. Modelling and validation of the mechatronic wedge brake. In SAE Transactions; SAE: Warrendale, PA, USA, 2003; pp. 2376–2386. [Google Scholar]
- Roberts, R.; Gombert, B.; Hartmann, H.; Lange, D.; Schautt, M. Testing the Mechatronic Wedge Brake; SAE Technical Paper; SAE: Warrendale, PA, USA, 2004; Volume 1, p. 2766. [Google Scholar]
- Ho, L.M.; Roberts, R.; Hartmann, H.; Gombert, B. The Electronic Wedge Brake-EWB; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2006. [Google Scholar]
- Semsey, Á.; Roberts, R. Simulation in the Development of the Electronic Wedge Brake; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2006. [Google Scholar]
- Fox, J.; Roberts, R.; Baier-Welt, C.; Ho, L.M.; Lacraru, L.; Gombert, B. Modeling and control of a single motor electronic wedge brake. In SAE Transactions; SAE: Warrendale, PA, USA, 2007; pp. 321–331. [Google Scholar]
- Kim, J.G.; Kim, M.J.; Kim, J.K.; Noh, K.H. Developing of Electronic Wedge Brake with Cross Wedge; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2009. [Google Scholar]
- Jo, C.; Lee, S.; Song, H.; Cho, Y.; Kim, I.; Hyun, D.; Kim, H. Design and control of an upper-wedge-type electronic brake. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 1393–1405. [Google Scholar] [CrossRef]
- Kim, J.G.; Kim, M.; Chun, J.; Huh, K. ABS/ESC/EPB Control of Electronic Wedge Brake; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2010. [Google Scholar]
- Han, K.; Kim, M.; Huh, K. Modeling and control of an electronic wedge brake. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2012, 226, 2440–2455. [Google Scholar] [CrossRef]
- Atia, M.R.; Haggag, S.A.; Kamal, A.M. Enhanced electromechanical brake-by-wire system using sliding mode controller. J. Dyn. Syst. Meas. Control. 2016, 138, 041003. [Google Scholar] [CrossRef]
- Yao, M.; Miao, J.; Cao, S.; Chai, H.; Chen, S. The structure design and optimization of electromagnetic-mechanical wedge brake system. IEEE Access 2019, 8, 3996–4004. [Google Scholar] [CrossRef]
- Che Hasan, M.H.; Khair Hassan, M.; Ahmad, F.; Marhaban, M.H. Modelling and Design of Optimized Electronic Wedge Brake. In Proceedings of the 2019 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 29 June 2019; pp. 189–193. [Google Scholar] [CrossRef]
- Derammelaere, S.; Haemers, M.; De Viaene, J.; Verbelen, F.; Stockman, K. A quantitative comparison between BLDC, PMSM, brushed DC and stepping motor technologies. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–5. [Google Scholar]
- Arasteh, E.; Assadian, F. New Robust Control Design of Brake-by-Wire Actuators. In Advanced Applications of Hydrogen and Engineering Systems in the Automotive Industry; IntechOpen: London, UK, 2020. [Google Scholar]
- Arasteh, E.; Assadian, F. A Comparative Analysis of Brake-by-Wire Smart Actuators Using Optimization Strategies. Energies 2022, 15, 634. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; Volume 6, pp. 4989–4996. [Google Scholar]
- Acarnley, P.P. Stepping Motors: A Guide to Theory and Practice; Number 63; IET: London, UK, 2002; pp. 36–39. [Google Scholar]
- Butcher, M.; Masi, A.; Picatoste, R.; Giustiniani, A. Hybrid stepper motor electrical model extensions for use in intelligent drives. IEEE Trans. Ind. Electron. 2013, 61, 917–929. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; p. 7. [Google Scholar]
- Lai, C.K.; Lin, B.W.; Lai, H.Y.; Chen, G.Y. FPGA-based hybrid stepper motor drive system design by variable structure control. Actuators 2021, 10, 113. [Google Scholar] [CrossRef]
- Guo, B.; Bacha, S.; Alamir, M. A review on ADRC based PMSM control designs. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1747–1753. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Wedge angle | 22.5 | |
| Pitch | l | 2/1000 m |
| Caliper stiffness | k | 4.5 × 10 N/m |
| Friction coefficient | 0.35 | |
| Phases | ph | 2 |
| Motor phase resistance | R | 0.46 |
| Motor phase inductance | L | 1.2 × 10 H |
| Motor teeth | 50 | |
| Rotor inertia | J | 3.52 × 10 |
| Step angle | 1.8 | |
| Torque constant | 1.7128 | |
| Viscous damping coefficient | B | 1 × 10 |
| Detent torque | 0.0510 | |
| Maximum flux | 0.137 Wb | |
| Switching cycle | 0.0001 s | |
| Power supply | 48 V |
| PID | SMC | ADRC | |
|---|---|---|---|
| Current control | = | = | = |
| = | = | = | |
| = | |||
| = | |||
| Speed control | = | = = = = | = |
| = | = | ||
| = 3142 | |||
| = | |||
| Position control | = | = |
| Controller | Present of Overshoot (%) | Rise Time (s) |
| PID | 0 | 0.24 |
| SMC | 83.68∼99.77% | 0.17 |
| ADRC | 0 | 0.16 |
| Controller | Settling Time (s) | Stead State Error (degree) |
| PID | 0.33 | 0.24 |
| SMC | 0.14 | −1.6∼1.76 |
| ADRC | 0.23 | 0.35 |
| Parameter | Symbol | Value |
|---|---|---|
| vehicle’s mass | 6500 kg | |
| wheel radius | 0.25 m | |
| flywheel’s mass | 40 kg | |
| flywheel’s radius | 0.19 m | |
| friction coefficient | 0.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Cho, C. A Novel Electronic Wedge Brake Based on Active Disturbance Rejection Control. Energies 2022, 15, 5096. https://doi.org/10.3390/en15145096
Xu F, Cho C. A Novel Electronic Wedge Brake Based on Active Disturbance Rejection Control. Energies. 2022; 15(14):5096. https://doi.org/10.3390/en15145096
Chicago/Turabian StyleXu, Feng, and Chongdu Cho. 2022. "A Novel Electronic Wedge Brake Based on Active Disturbance Rejection Control" Energies 15, no. 14: 5096. https://doi.org/10.3390/en15145096