
Super-Twisting Algorithm-Based Virtual Synchronous Generator in Inverter Interfaced Distributed Generation (IIDG)

 , , , and
, , , and
Abstract
:1. Introduction
1.1. Motivation of Work
1.2. Literature Survey on Recent State of Art
1.3. Contribution
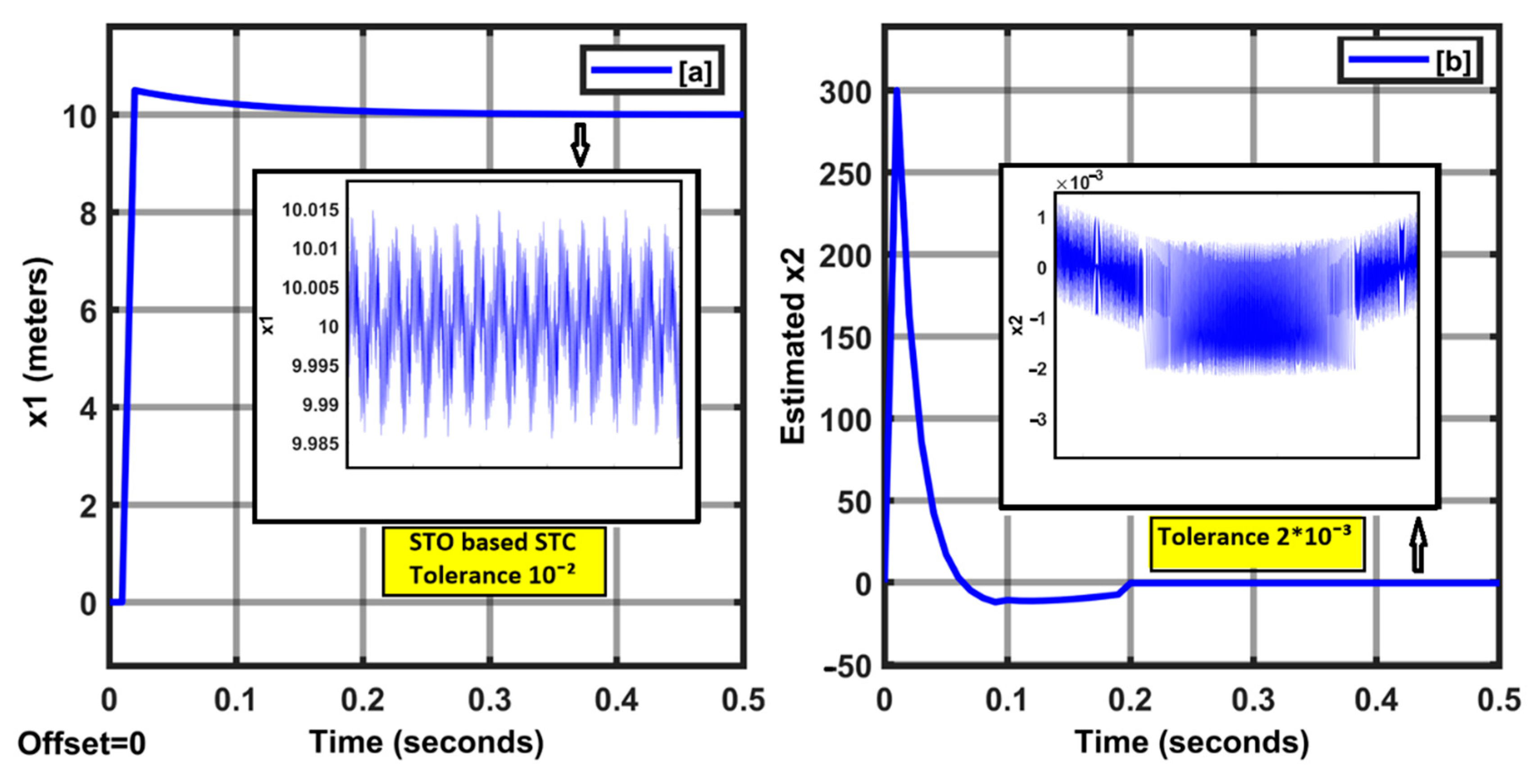
- Super-twisting is a novel scheme to identify all the states in finite time t < T0 with the minimum number of required sensors.
- The super-twisting controller converges very quickly and provides the accurate real power required for inertia emulation under finite disturbance d1.
- This novel controller efficiently improves the frequency dynamics.
- The suggested controller illustrates a superior performance over the recent popular controllers viz. model prediction, fuzzy, or self-tuning controllers.
2. Mathematical Modeling of Proposed VSG Dynamics
2.1. Non-Linear Dynamics of VSG-IIDG
2.2. VSG-IIDG Scheme
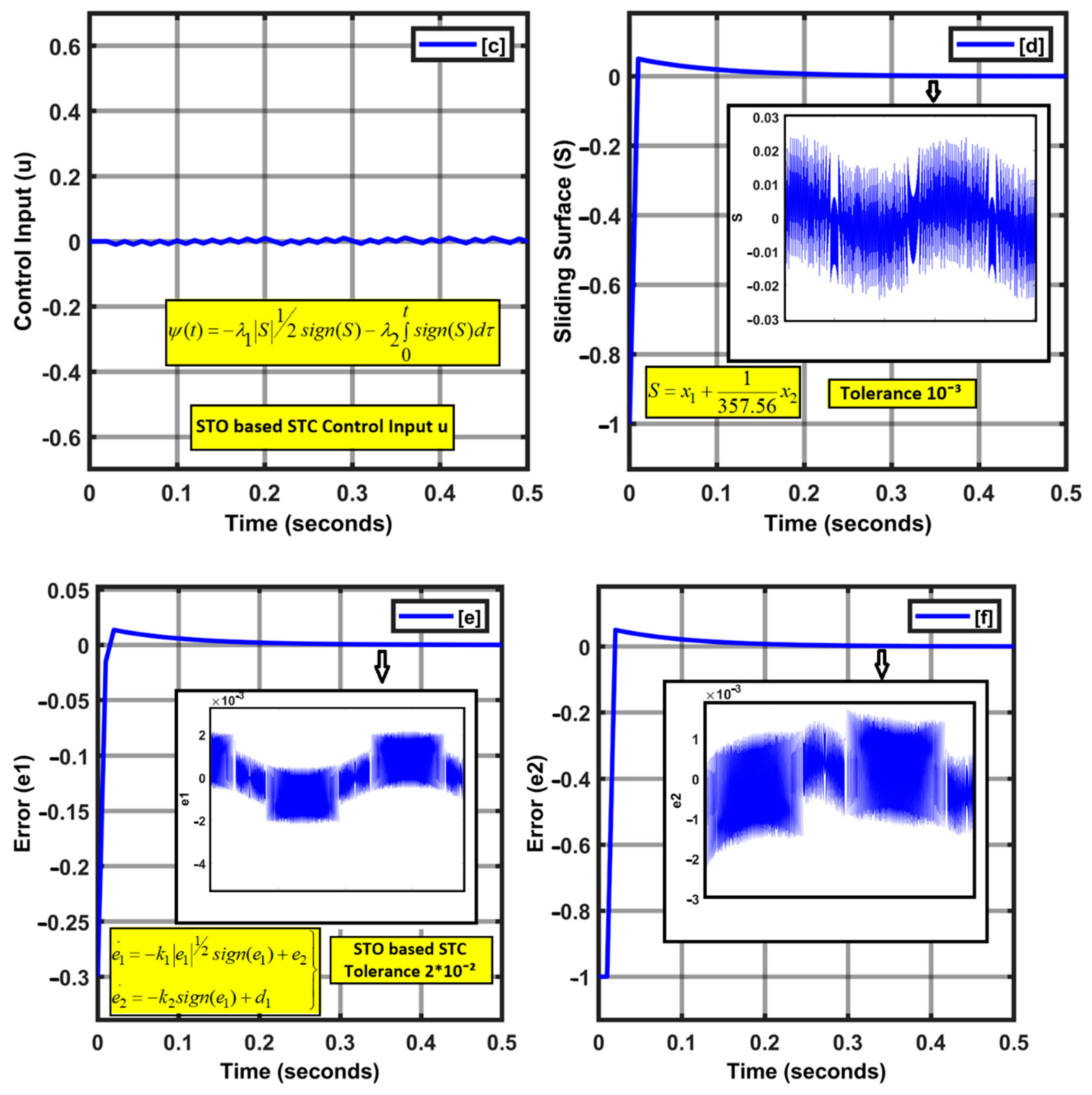
2.3. STC Based on STO
2.4. ST Control Algorithm and Design
- -
- STO gains: ;
- -
- STC gains: ;
- -
- Constant , sampling time (MATLAB) = 1 ms.
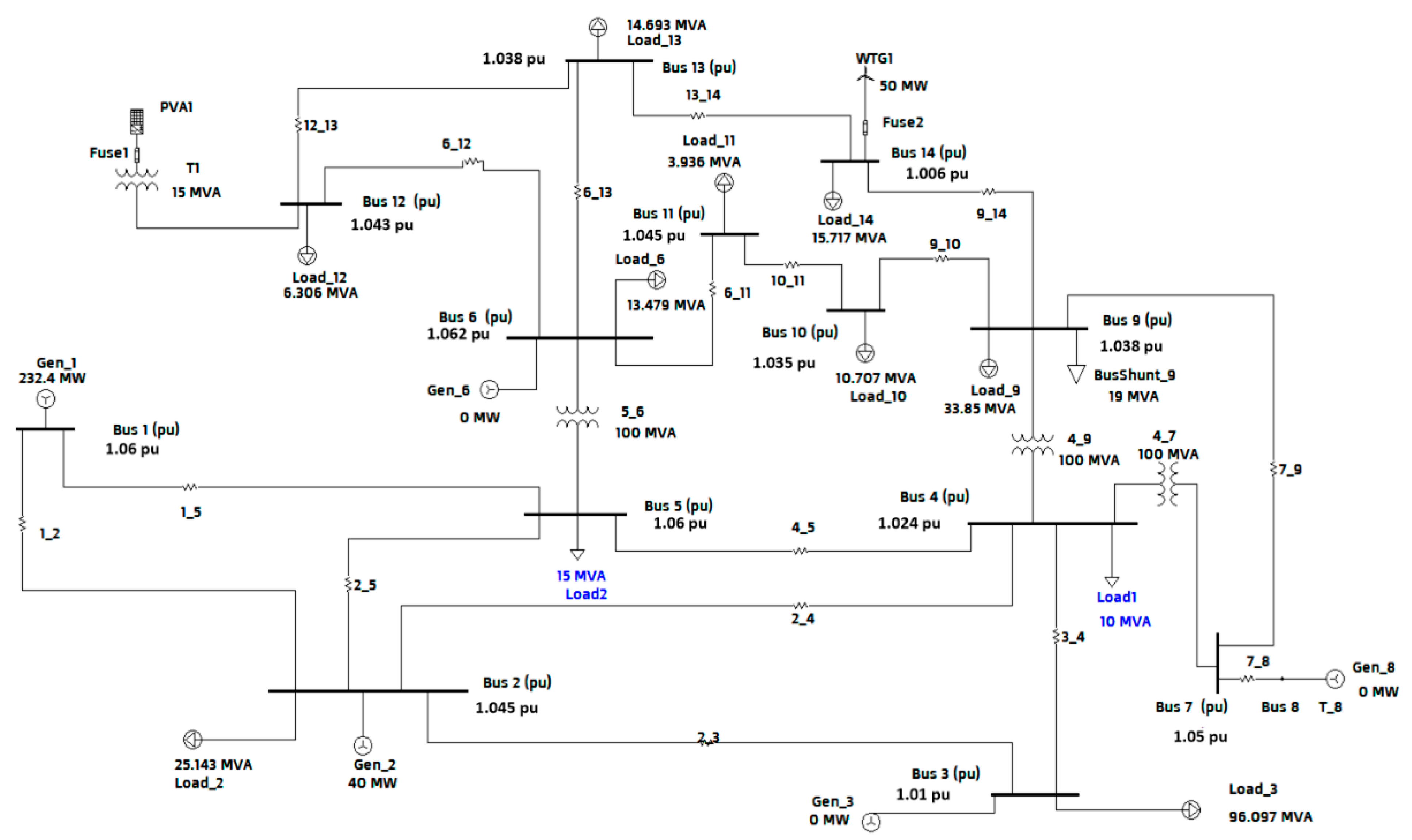
3. Test System Configuration and Setup
4. Simulation Results and Performance Evaluation
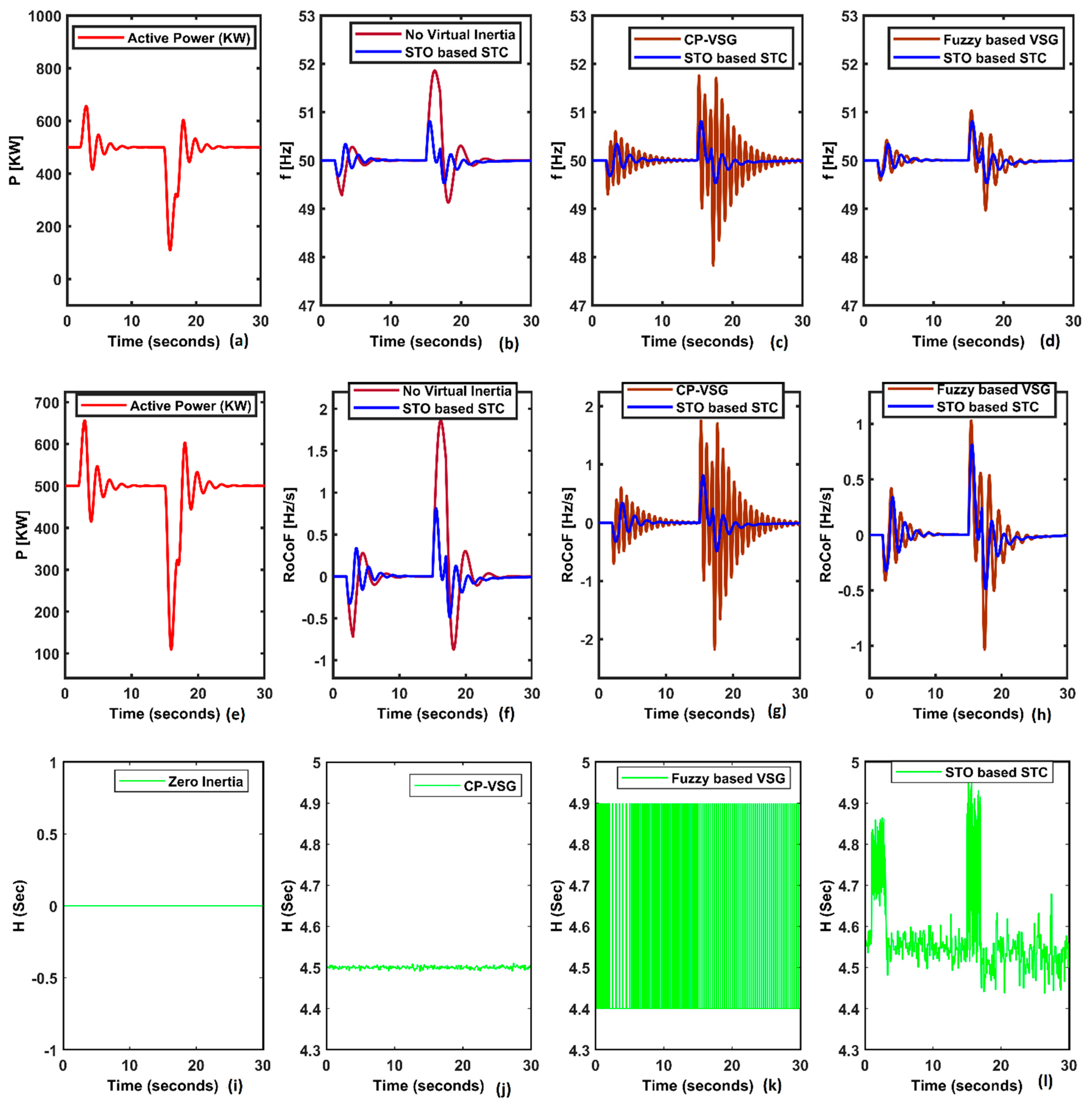
4.1. Sudden Load Variation in Grid-Connected VSG
4.2. Inertia Response on AC Fault
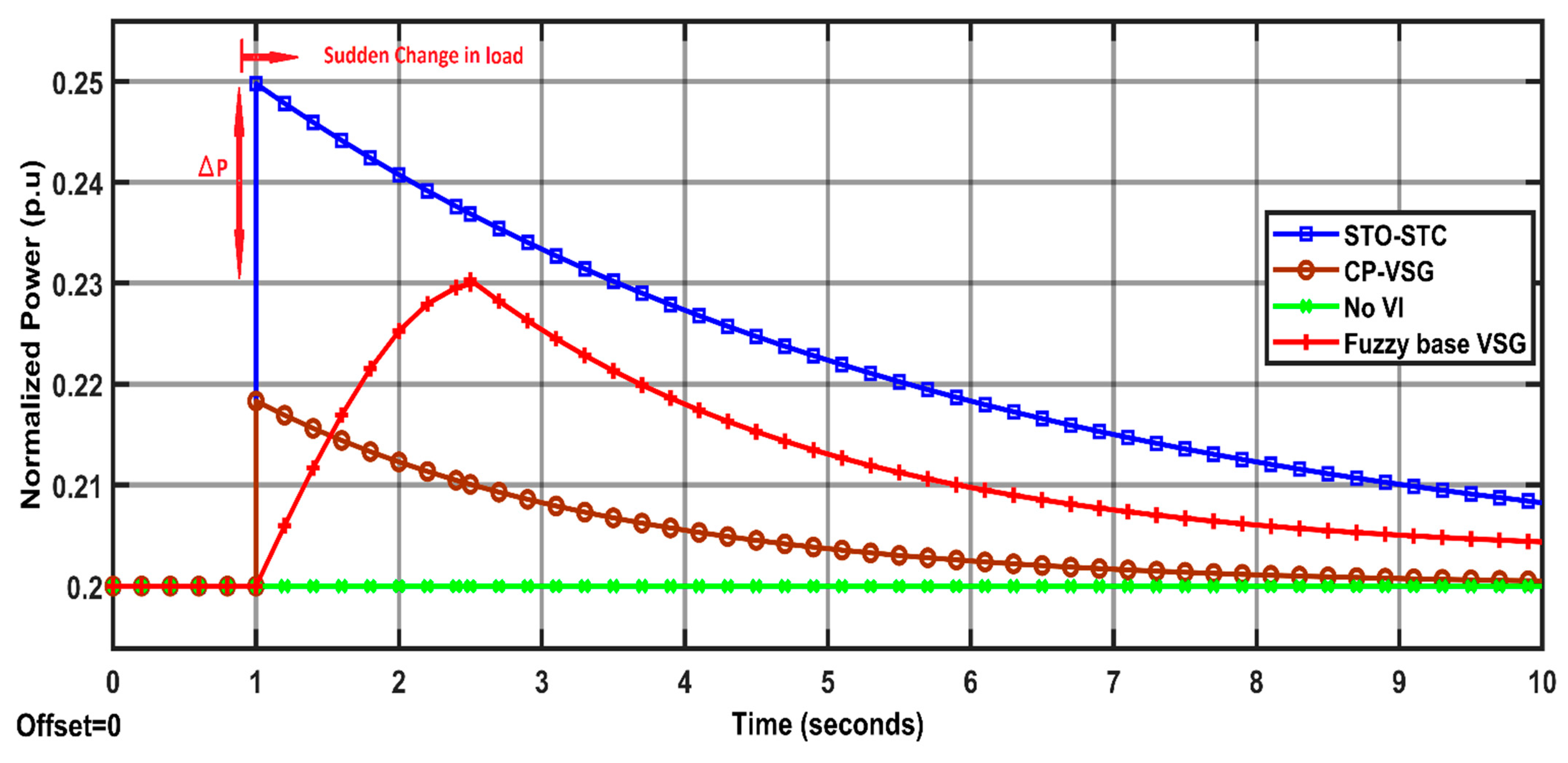
4.3. Normalized Active Power Response under Sudden Load Variation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Majumder, R. Some aspects of stability in microgrids. IEEE Trans. Power Syst. 2013, 28, 3243–3252. [Google Scholar] [CrossRef]
- Torres, L.M.A.; Lopes, L.A.C.; Morán, T.L.A.; Espinoza, C.J.R. Self-tuning virtual synchronous machine: A control strategy for energy storage systems to support dynamic frequency control. IEEE Trans. Energy Convers. 2014, 29, 833–840. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using a virtual synchronous generator with alternating moments of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Ravanji, M.H.; Parniani, M. Modified virtual inertial controller for prudential participation of DFIG-based wind turbines in power system frequency regulation. IET Renew. Power Gener. 2017, 13, 155–164. [Google Scholar] [CrossRef]
- Van de Vyver, J.; De Kooning, J.D.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop control as an alternative inertial response strategy for the synthetic inertia on wind turbines. IEEE Trans. Power Syst. 2015, 31, 1129–1138. [Google Scholar] [CrossRef]
- Ofir, R.; Markovic, U.; Aristidou, P.; Hug, G. Droop vs. virtual inertia: Comparison from the perspective of converter operation mode. In Proceedings of the IEEE International Energy Conference (ENERGYCON), Limassol, Cyprus, 3–7 June 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Borsche, T.; Dorfler, F. On placement of synthetic inertia with explicit time-domain constraints. arXiv 2017, arXiv:1705.03244. [Google Scholar]
- Wang, F.; Zhang, L.; Feng, X.; Guo, H. An adaptive control strategy for virtual synchronous generator. IEEE Trans. Ind. Appl. 2018, 54, 5124–5133. [Google Scholar] [CrossRef]
- Khajehoddin, S.A.; Karimi-Ghartemani, M.; Ebrahimi, M. Grid-supporting inverters with improved dynamics. IEEE Trans. Ind. Electron. 2019, 66, 3655–3667. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.-C. Small-signal modeling and parameters design for virtual synchronous generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Markovic, U.; Chu, Z.; Aristidou, P.; Hug-Glanzmann, G. Lqr-based adaptive virtual synchronous machine for power systems with high inverter penetration. IEEE Trans. Sustain. Energy 2018, 10, 1501–1512. [Google Scholar] [CrossRef]
- Singh, S.K.; Singh, R.; Diwania, S.; Singhal, A.; Saway, S. Impact of Inverter Interfaced DG Control Schemes on Distributed Network Protection Recent Advances in Power Electronics and Drives. In Lecture Notes in Electrical Engineering; Springer: Singapore, 2021; Volume 707. [Google Scholar]
- Andalib-Bin-Karim, C.; Liang, X.; Zhang, H. Fuzzy-secondary controller-based virtual synchronous generator control scheme for interfacing inverters of renewable distributed generation in microgrids. IEEE Trans. Ind. Appl. 2018, 54, 1047–1061. [Google Scholar] [CrossRef]
- Lakshmi, V.S.; Purushotham, P. ANFIS controller with virtual synchronous generator control for parallel inverters in microgrids. Int. J. Innov. Technol. 2017, 5, 2155–2161. [Google Scholar]
- Wang, S.; Dehghanian, P.; Alhazmi, M.; Nazemi, M. Advanced control solutions for enhanced resilience of modern power-electronic-interfaced distribution systems. J. Mod. Power Syst. Clean Energy 2019, 7, 716–730. [Google Scholar] [CrossRef]
- Ademola-Idowu, A.; Zhang, B. Frequency Stability Using MPC-Based Inverter Power Control in Low-Inertia Power Systems. IEEE Trans. Power Syst. 2021, 36, 1628–1637. [Google Scholar] [CrossRef]
- Karimi, A.; Khayat, Y.; Naderi, M.; Dragičević, T.; Mirzaei, R.; Blaabjerg, F. Inertia Response Improvement in AC Microgrids: A Fuzzy-Based Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2020, 35, 4321–4331. [Google Scholar] [CrossRef]
- Yap, K.Y.; Sarimuthu, C.R.; Lim, J.M.-Y. Virtual inertia-based inverters for mitigating frequency instability in grid-connected renewable energy system: A review. Appl. Sci. 2019, 9, 5300. [Google Scholar] [CrossRef]
- Rosales, A.; Yu, Z.; Ponce, P.; Molina, A.; Ayyanar, R. VSG scheme under unbalanced conditions controlled by SMC. IET Renew. Power Gener. 2019, 13, 3043–3049. [Google Scholar] [CrossRef]
- Akagi, H.; Ogasawara, S.; Kim, H. The theory of instantaneous power in three-phase four-wire systems: A comprehensive approach. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference 34th IAS Annual Meeting (Cat. No. 99CH36370), Phoenix, AZ, USA, 3–7 October 1999; Volume 1, pp. 431–439. [Google Scholar]
- Schiffer, J.; Zonetti, D.; Ortega, R.; Stanković, A.M.; Sezi, T.; Raisch, J. A survey on modeling of microgrids: From fundamental physics to phasors and voltage sources. Automatica 2016, 74, 135–150. [Google Scholar] [CrossRef]
- Vekić, M.; Rapaić, M.R.; Šekara, T.B.; Grabić, S.; Adžić, E. Multi–Resonant observer PLL with real-time estimation of grid unbalances. Int. J. Electr. Power Energy Syst. 2019, 108, 52–60. [Google Scholar] [CrossRef]
- Singh, S.K.; Singh, R.; Ashfaq, H.; Kumar, R. Virtual Inertia Emulation of Inverter Interfaced Distributed Generation (IIDG) for Dynamic Frequency Stability & Damping Enhancement Through BFOA Tuned Optimal Controller. Arab. J. Sci. Eng. 2021, 47, 3293–3310. [Google Scholar]
- Zheng, X.; Wang, C.; Pang, S. Injecting positive-sequence current virtual synchronous generator control under unbalanced grid. IET Renew. Power Gener. 2019, 13, 165–170. [Google Scholar] [CrossRef]
- Kumari, K.; Chalanga, A.; Bandyopadhyay, B. Implementation of Super-Twisting Control on Higher Order Perturbed Integrator System using Higher Order Sliding Mode Observer. IFAC-PapersOnLine 2016, 49, 873–878. [Google Scholar] [CrossRef]
- Southall, B.; Bernard, F.B.; John, A.M. Controllability and Observability: Tools for Kalman Filter Design. In Proceedings of the British Machine Vision Conference, Southampton, UK; 1998. [Google Scholar]
- Xue, Y.; Pequito, S.; Coelho, J.R.; Bogdan, P.; Pappas, G.J. Minimum number of sensors to ensure observability of physiological systems: A case study. In Proceedings of the 2016 54th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 27–30 September 2016; pp. 1181–1188. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Existing State of the Art | Controller Description | Attributes |
|---|---|---|
| M. A. Torres et al., 2014 [2] | Self-tuning virtual synchronous machine | Energy storage system for inertia emulation |
| J. Alipoor et al., 2015 [3] | Alternating inertia-based virtual SG | Tunes inertia and damping constants |
| M. H. Ravanji et al., 2017 [4] | Swing equation-based virtual inertia | DFIG-based wind turbines |
| C. A. B Karim et al., 2018 [13] | VSG based on fuzzy controller | Distributed generation in microgrid |
| S. Wang et al., 2019 [15] | Advanced control solutions | Enhanced resilience in distribution system |
| A. Karimi et al., 2020 [17] | Fuzzy-based VSM | Regulated governor output and correction term |
| A. A-Idowu et al., 2021 [16] | MPC (model predictive control) | Optimal power set points |
| Proposed work | STC based on STO | Enhance frequency dynamics in multi-machine system |
| System Parameters | Values |
|---|---|
| DC-link voltage (VDC) | 800 V |
| Nominal frequency (fn) | 50 Hz |
| Output inverter voltage | 450 V |
| Inertia constant (H) | 4, 7, 10 s |
| Maximum irradiance | 1000 W/m2 |
| Temperature (T) | 38 °C |
| Parallel strings | 76 |
| Series modules | 23 |
| Open circuit voltage (Voc) | 36.3 V/Module |
| Short circuit current (Isc) | 7.84 A/Module |
| Nominal voltage | 835 V(DC) |
| Nominal current | 598 A(DC) |
| Max power/module | 213.15 W |
| Speed regulation of governor (R) | 0.05 pu |
| Inertia of synchronous generator (H) | 4 s |
| Control Scheme | No VI | CP-VSG | STO-Based STC | |
|---|---|---|---|---|
| Attributes | ||||
| Frequency nadir [Hz] | 49.2 (Violates IEEE 1574) | 49.4 | 49.8 | |
| Frequency overshoot [Hz] | 52 (Violates IEEE 1574) | 51.9 | 50.9 | |
| RoCoF [Hz/s] | −0.8 | −0.7 | −0.3 | |
| Steady state error (%) | 1.45 | 0.7 | 0.13 | |
| Settling time [ts/s] | 5 | 10 | 3 | |
| Inertia H [s] | 0 | 4.5 | Adaptive (4.4–4.9) | |
| Control Scheme | Fuzzy-Based VSG | STALG | MPC Scheme | |
| Attributes | ||||
| Frequency nadir [Hz] | 49.8 | 49.7 | 49.6 | |
| RoCoF [Hz/s] | −0.4 | −0.5 | −0.3 | |
| Settling time [ts] | 4 | 3.7 | 4.2 | |
| Attribute | Fuzzy Based VSG | STO-STC | MPC Scheme |
|---|---|---|---|
| Settling time (s) | 6 | 6.3 oscillatory responses | 5.8 |
| DC link variation (V) | 5 | 7 | 13 |
| Bus-1, Gen.1 settling time (s) | 12 | 9 | 8 |
| Attribute | No VI | CP-VSG | AI Based VSG |
| Settling time (s) | Unspecified | 20 oscillatory responses | 6.5 |
| DC link variation (V) | No variation | 5 | 9 |
| Bus-1, Gen.1 settling time (s) | 20 | 14 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, S.K.; Singh, R.; Ashfaq, H.; Sharma, S.K.; Sharma, G.; Bokoro, P.N. Super-Twisting Algorithm-Based Virtual Synchronous Generator in Inverter Interfaced Distributed Generation (IIDG). Energies 2022, 15, 5890. https://doi.org/10.3390/en15165890
Singh SK, Singh R, Ashfaq H, Sharma SK, Sharma G, Bokoro PN. Super-Twisting Algorithm-Based Virtual Synchronous Generator in Inverter Interfaced Distributed Generation (IIDG). Energies. 2022; 15(16):5890. https://doi.org/10.3390/en15165890
Chicago/Turabian StyleSingh, Sudhir Kumar, Rajveer Singh, Haroon Ashfaq, Sanjeev Kumar Sharma, Gulshan Sharma, and Pitshou N. Bokoro. 2022. "Super-Twisting Algorithm-Based Virtual Synchronous Generator in Inverter Interfaced Distributed Generation (IIDG)" Energies 15, no. 16: 5890. https://doi.org/10.3390/en15165890