Abstract
An important engineering challenge is the design of a wind turbine’s pitch angle controller. The dependability, safety, and power output maximization of a wind turbine are all impacted by this controller. In this study, a 2 MW doubly fed induction generator wind turbine’s blade angle controller design with a novel fuzzy logic controller is tested in a simulated environment. The evolutionary algorithm technique is used to optimize the fuzzy logic controller with three inputs. A genetic algorithm is used to optimize the specified pitch angle controller for a number of coefficients. After the optimization process, the controller’s performance is assessed in terms of power output, overshoot, and steady-state error characteristics.
1. Introduction
Traditional energy sources such as natural oil, gas, and coal have proven to be quite successful economic drivers. They are, however, hazardous to the environment and public health. Wind energy has grown in popularity in recent years due to its inherent features of being reusable and clean, in contrast to the quick depletion and increasing environmental risks of fossil fuels. Wind turbines are the primary equipment used in the energy industry to convert wind energy into electric energy. They cannot produce constant power without a proper regulation system, since wind speed fluctuates erratically. Therefore, researchers focused on the stability and dependability of control systems. The pitch angle is the primary control variable of the wind turbine control system. Its control is one of the dominant factors that determines the conversion efficiency of wind energy.
Wind varies dramatically in nature. As a result, wind turbines exhibit rapid variations in electric energy output [1]. Turbines are controlled in different ways defined by wind speed. The wind speed at which the turbine starts to produce energy is defined as the cut-in speed. Below cut-in wind speed, aeromechanical power cannot overcome the mechanical inertia of the power train, and the turbine does not operate. Cut-out speed is the wind speed at which a wind turbine ceases to operate. If the turbine reaches around cut-out wind speed, the automation system protects the turbine from mechanical damage by braking or shutting down the operation. Typically, there are three major operational regions for wind turbines [2]. In the second region, wind speeds are more than the cut-in value but less than the rated value, which is defined as the wind speed where the maximum turbine power is reached. The turbine should work to maximize power in this region [3]. In the third region, wind speeds are higher than the rated value but less than the cut-out value. Wind turbine output power is be maintained at a nominal output value by using a blade pitch angle controller [4].
Pitch angle control is required when the generator rotating speed is kept constant and the wind speed exceeds the rated wind speed. Minor adjustments in pitch angle can have a significant impact on power output. In order to maintain wind turbine output power at a desired nominal value, fuzzy logic approaches are widely employed in the literature. A fuzzy logic pitch angle controller is used directly in a number of investigations [4,5,6,7,8,9,10,11]. In addition to the direct fuzzy logic control (FLC), fuzzy logic proportional control [1,12,13,14], hybrid Proportional Integral (PI) fuzzy logic control [15,16,17], hybrid Proportional Integral Derivative (PID) fuzzy logic control [18,19,20,21], fuzzy predictive control [2,3], neuro-fuzzy control [22,23,24], and hybrid fuzzy sliding mode control [25] are also used for regulation at a nominal output power and to counteract fluctuations in power output.
Model predictive control, a predictive control that simulates future reactions, has been presented to enhance the performance of the wind turbine in order to predict future responses for the wind [26]. In addition, sliding mode control (SMC) is employed in the control field for wind turbines because of its effective operation and straightforward design. Additionally, it manages uncertainty brought on by unmodeled quantities, parametric fluctuations, and modeling approximations [27].
Another approach applied to wind turbines is that of genetic algorithms (GA). This methodology is used to search for optimum design or controller parameters. Research on airfoils [28,29] and the creation of a framework for floating offshore wind turbine support structures [30] are two examples of studies focusing on the best design parameters. The controller design is another area in which GA is employed. Integral gains are tuned [31], PI [32,33,34], and also PID controller parameters are optimized with the GA [35]. Feedback control can be employed with the GA for wind turbines [36,37,38]. GA can be used to search for a pitch variation law in order to optimize efficiency [39]. Wind speed estimator [40], tip speed ratio and pitch angle optimization for the maximization of the total power of wind farms [41] are other methods that use the GA to improve the performance of wind turbine systems.
FLC parameters can also be tuned with the GA in order to enhance the effectiveness of the controller. Wind turbine generators can be controlled with FLC and GA [42,43]. The pitch angle control of the turbine can be achieved with this control technique. In [44,45], the pitch angle control of a turbine is carried out with FLC and control parameters are tuned with genetic tuning. These fuzzy controllers employ generator power as input of the fuzzy controller. Likewise, in [46,47], pitch angle control is achieved with FLC and GA. In these control schemes, power error and the power error rate of change are used as inputs of the FLC system.
In this study, we use FLC with GA to control the pitch angle of a 2 MW wind turbine model described in [48]. We constructed a novel control system to employ three inputs for fuzzy logic control: error in generator power, power error rate, and generator speed. A genetic algorithm tunes fuzzy logic control parameters. We present the performance of the controller under fluctuating wind profile with simulation results. The organization of this paper is as follows. Section 2 describes the methodology of the wind turbine model, the fuzzy logic controller and the GA. Section 3 presents simulation results with discussions. Lastly, in Section 4, conclusions are put together.
2. Methodology
Modeling of a wind turbine is a critical part of wind turbine engineering as it affects many disciplines. There are several simulator options employed in research and development. There are two major types of wind turbine models in the literature: a doubly fed induction generator (DFIG) type with a gearbox, and a direct drive type without a gearbox. In this study, the controller algorithm is designed and optimized for a 2 MW wind turbine with a DFIG type generator. The system is modeled in order to build controllers and observe the impacts of numerous engineering factors. The mathematical model is generated in the MATLAB Simulink environment. The model can simulate thermal and electrical grid aspects, power output, and controller effects.
2.1. Modeling of a Turbine
The mathematical model of a wind turbine can be defined by the torque equation of its rotor. (1) below expresses the main dynamics of a turbine rotor [4].
Here denotes the air density [kg/m3], R stands for the radius of the rotor (m), is the wind speed [m/s], β is the pitch angle, and is the tip speed ratio [4].
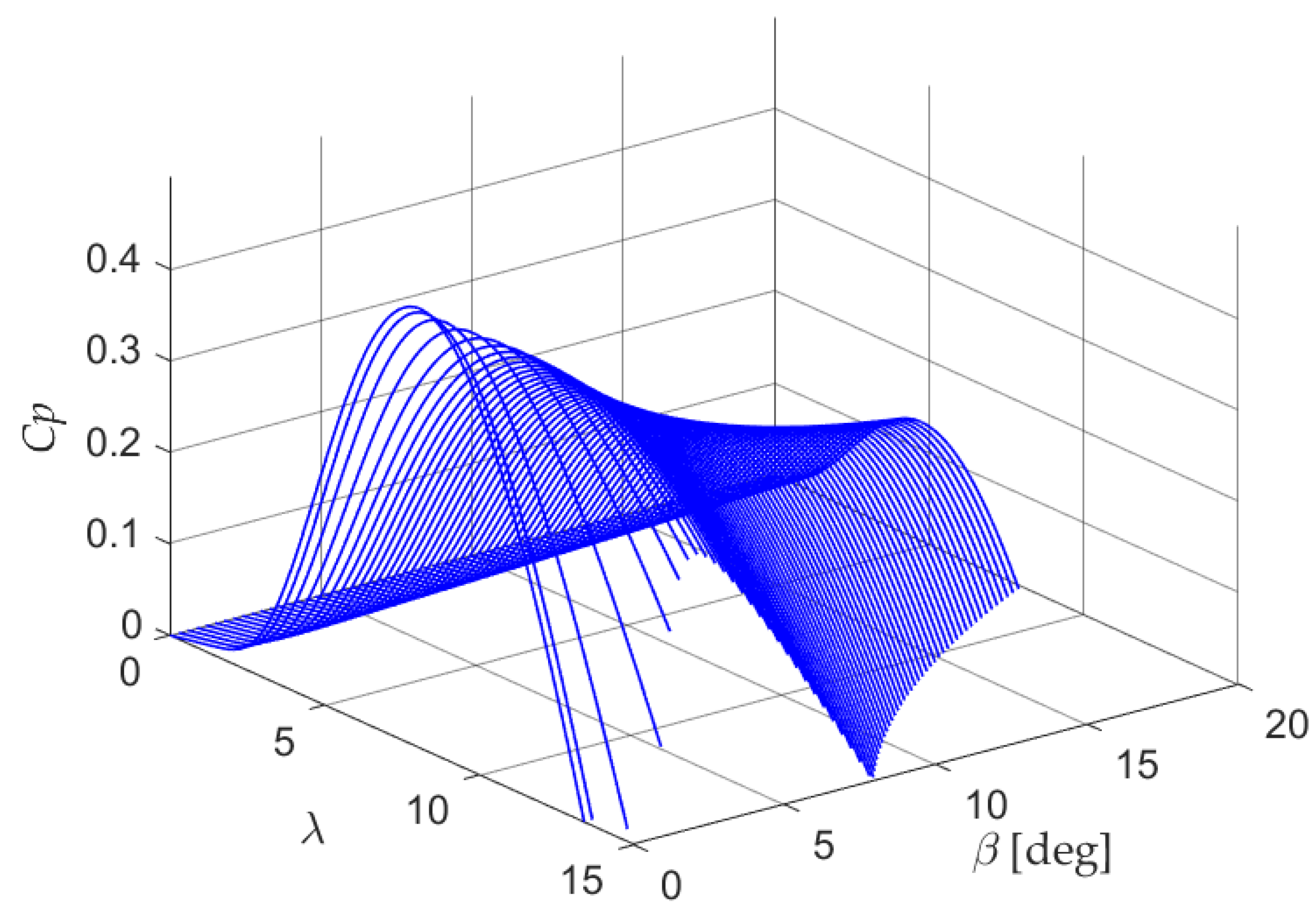
Power coefficient ( is one of the most crucial parameters for wind turbines. The function converts the parameters pitch angle and the tip speed ratio to a constant between 0 and 0.6. The constant that the function affects is the generated aeromechanical power of a turbine. The power coefficient is calculated as,
where
and = 0.5, = 116, = 0.4, = 5, [49].
Figure 1 shows the curves for the power coefficients for a modern horizontal axis wind turbine. They are functions of pitch angle and tip speed ratio. As shown in power curve in Figure 1, the pitch angle variable plays a crucial role in maximization of the turbine power.
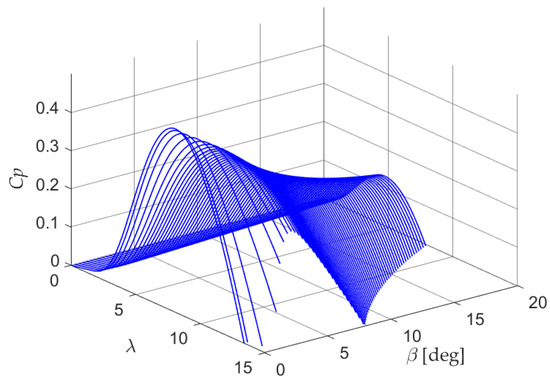
Figure 1.
Power coefficient diagram of a modern wind turbine.
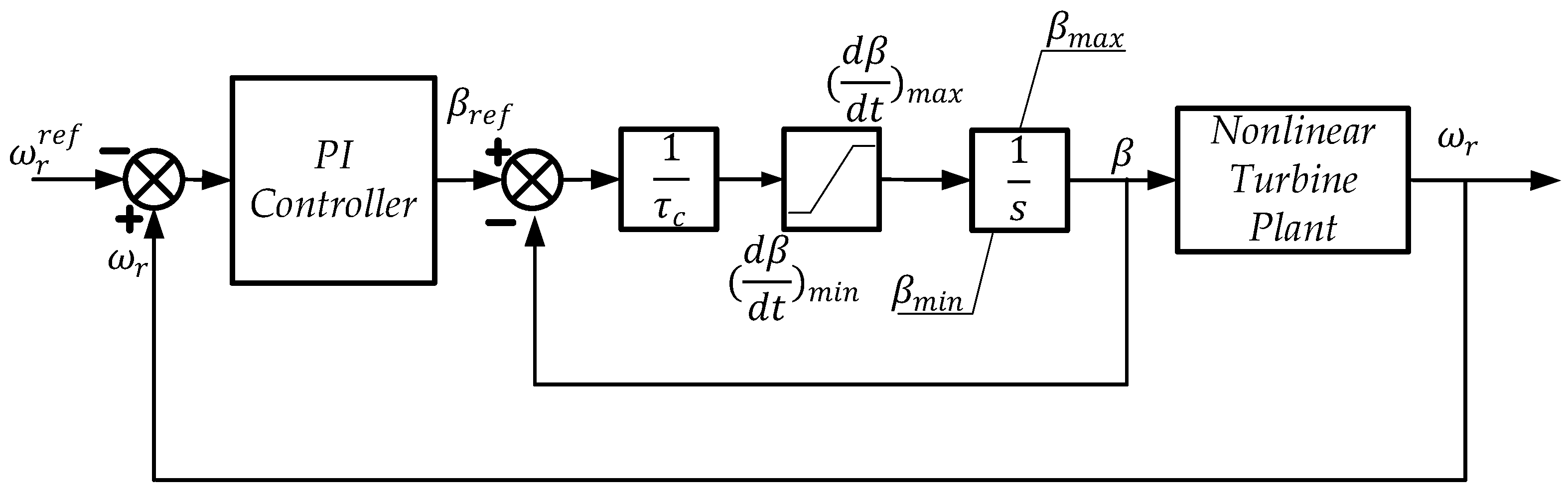
Figure 2 presents the block diagram of a conventional wind turbine. As can be seen from the figure, the pitch angle reference is supplied for a nonlinear turbine plant where the output is generally the rotational speed of the generator. In the following sections of this study, the purpose of the proposed controller is to keep the rotational speed of the generator stable.
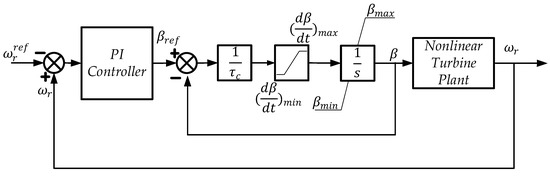
Figure 2.
Typical PI control block diagram of a wind turbine pitch angle controller.
2.2. DFIG Type Wind Turbine Configuration and Modeling
Wind turbines consist of a number of subsystems named mechanical, electromechanical and electrical submodules. The aerodynamic subsystem is also to be considered. All subsystems and modules have their dedicated controllers. The controllers for pitch and torque, however, have the most dominant roles.
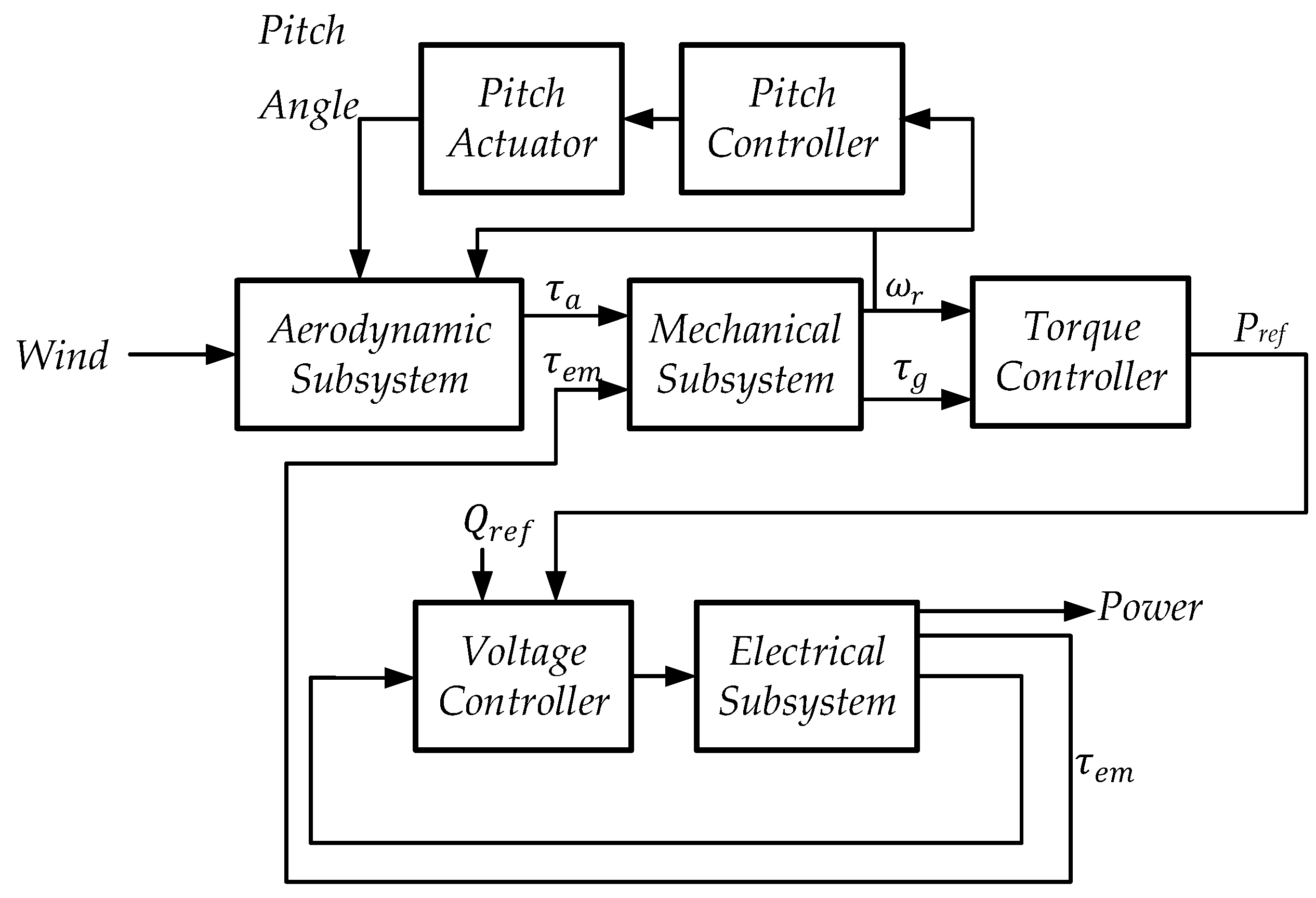
As shown in Figure 3, wind turbines comprise a variety of subsystems from many technical disciplines, and most of them require distinct controllers. Torque controllers are often used to adjust the power of DFIG type generators, whereas pitch controllers are utilized to control the rotor speed. The classification of operating regions is significant for wind turbine technologies since wind regime graphs provide many critical descriptions for the turbine, including operating speed, maximum power, and maximum attainable aeromechanical power. The wind profile is separated into three regions based on wind speed. Operational regions are referred to as (1) cut-in, (2) rated and (3) cut-off. Turbines typically begin to generate power when the wind speed reaches a threshold speed (cut-in speed). The wind turbine control system operates in the MPPT (Maximum Power Point Tracking) state until the time when the rated wind speed is reached. As the wind speed increases, the pitch mechanism maximizes the power generation from the accessible aeromechanical power. In the rated speed region (between cut-in and rated wind speeds), the pitch system regulates the pitch angle at zero degrees. In the cut-off region (between rated and cut-off wind speeds), the pitch angle is controlled in order to keep the power at its rated value. Beyond the cut-off speed, the automation system uses the pitch angle by regulating or locking at a certain value with blades parallel to the incoming wind, with the objective of halting the wind turbine [8]. The controller proposed in this paper can be employed in all control roles mentioned above.
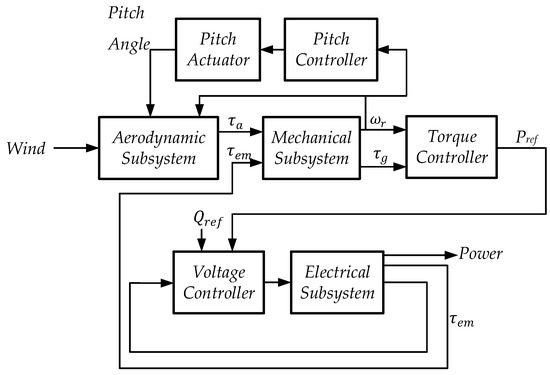
Figure 3.
Wind Turbine Block Diagram.
Modeling aerodynamic, mechanical, electromechanical effects, and grid side converters in a simulation is significant in the performance comparison of controllers. The model of a 2 MW DFIG type variable speed and variable pitch wind turbine in MATLAB/Simulink is employed. A wind profile above the rated speed is employed. This particular wind profile aims at studying how abrupt wind changes and pitch control affects power regulation.
2.3. Fuzzy Logic Controller
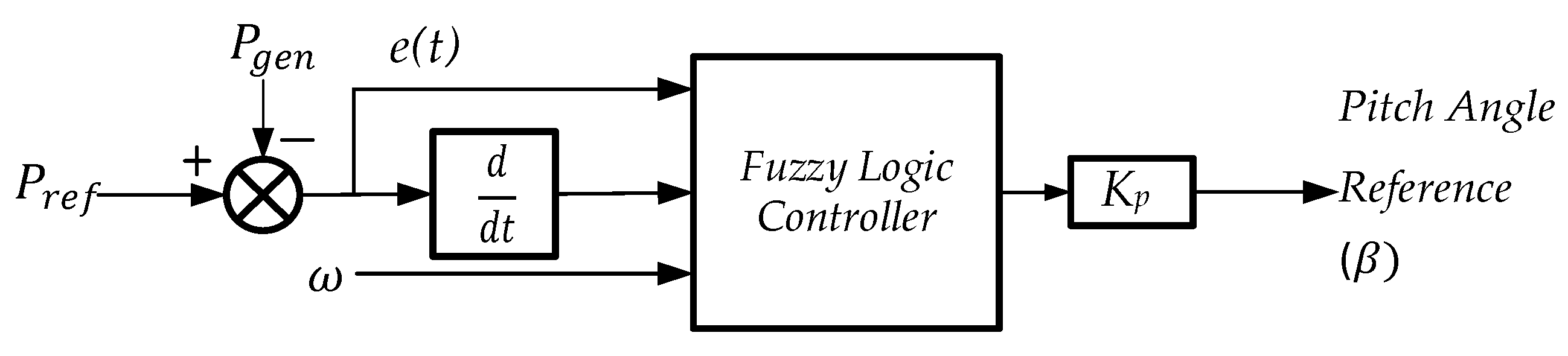
The advantage of a fuzzy controller is its remarkable inference capability based on fuzzy information. Changes to the control rules and suitable membership functions, reasoning processes, and choices can enhance the features of the controlled system. Fuzzy control has been frequently utilized in variable pitch control to reduce the negative impacts of nonlinear components and the challenge of changing system parameters. The design of the control scheme is crucial, including the selection of input and output variables and membership function parameters. Figure 4 shows the fuzzy control system block diagram.
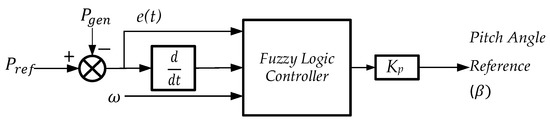
Figure 4.
Control System Block Diagram.
Power error, change in power error, and generator speed are chosen as controller inputs. The purpose of the controller is to steadily keep power at its reference. Power error and change in power error during one computational cycle are selected as inputs for power regulation. These variables are defined as power error and change in power error.
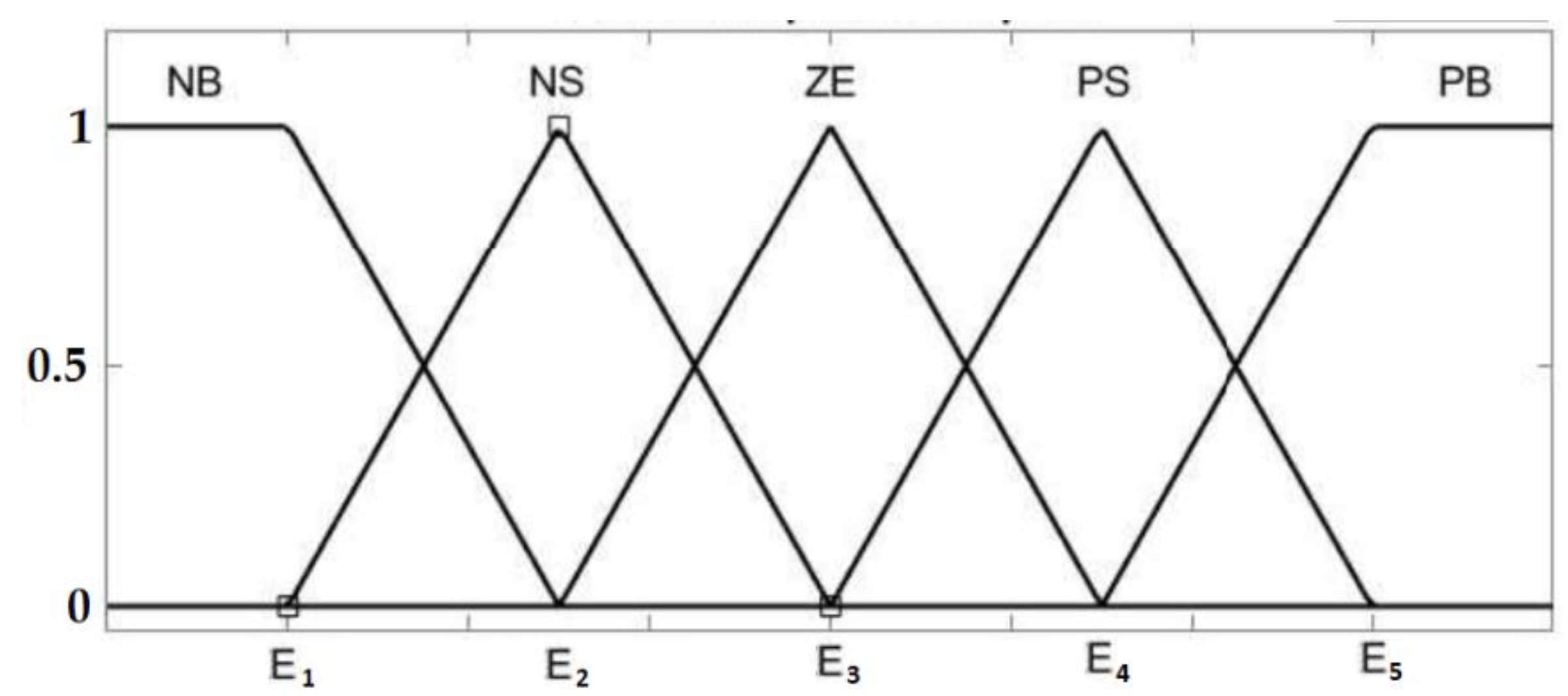
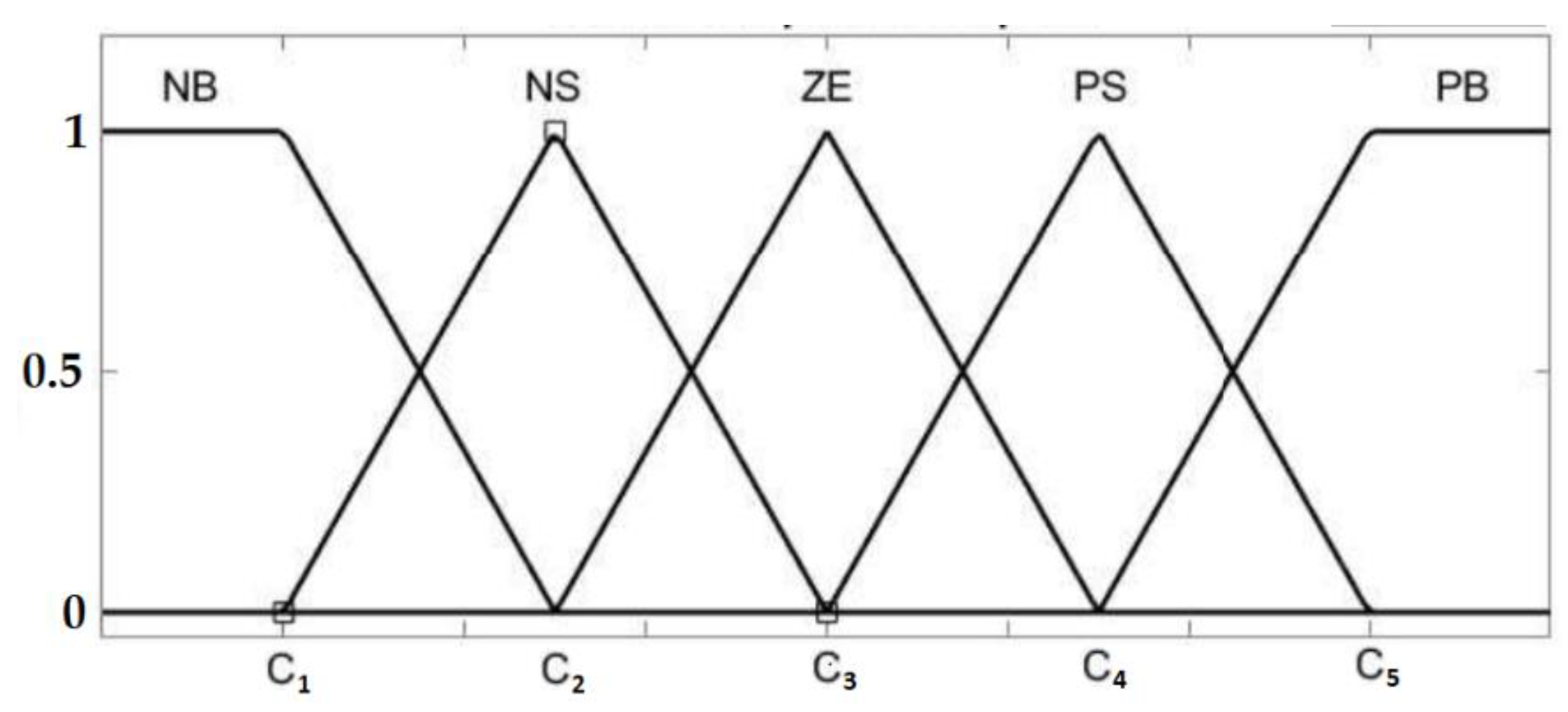
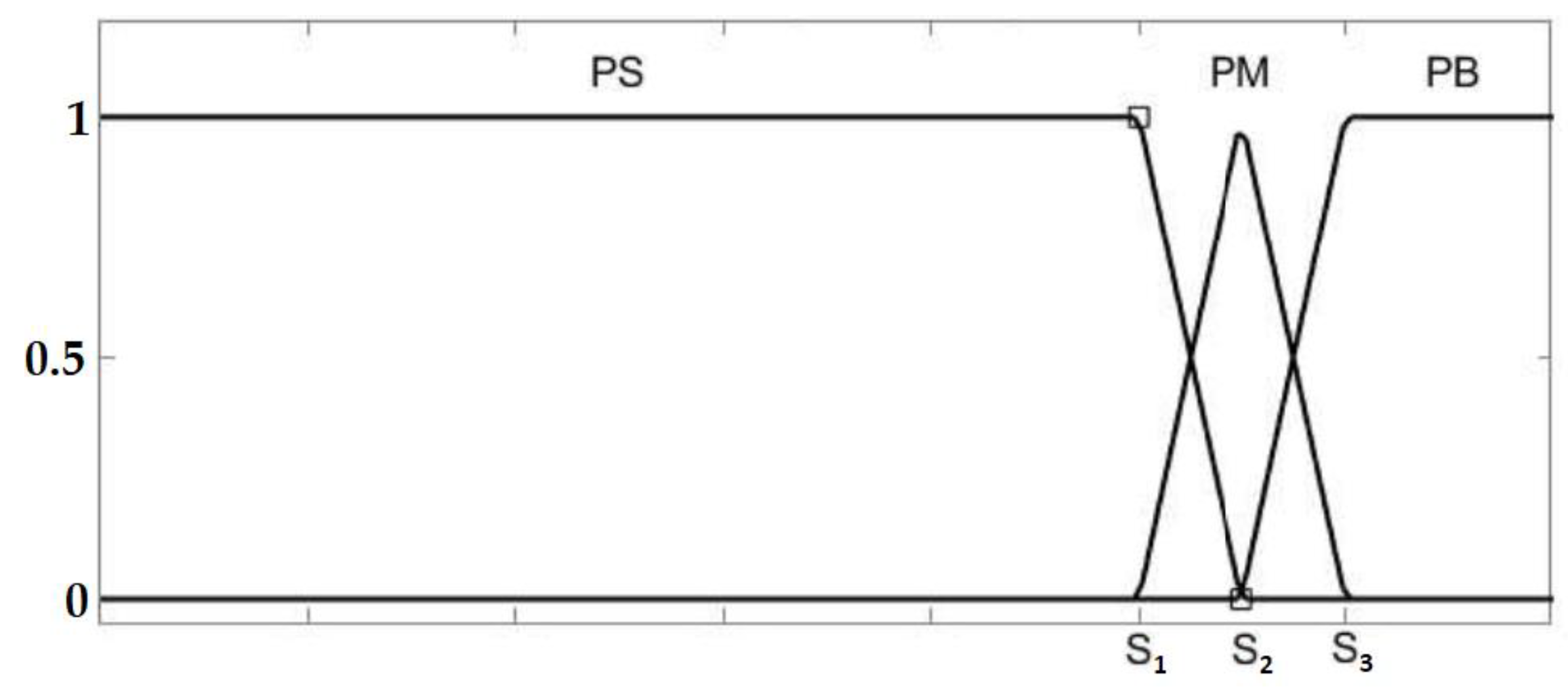
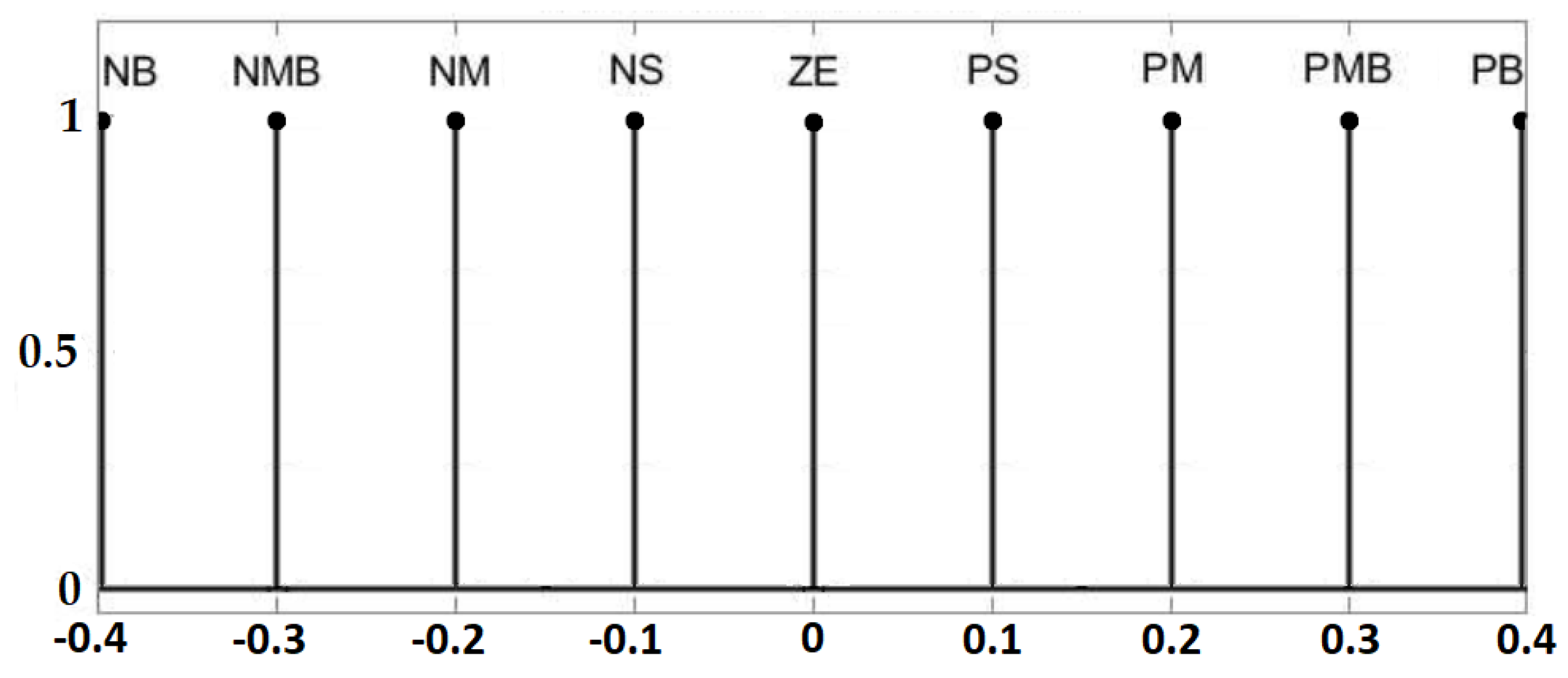
Here is power error, is generator power reference, is discrete time step, is generator power, and is the change in power error. A third input variable is also used, namely, the deviation of the generator speed from its nominal value, . Any modification on the pitch angle will affect the generator speed. The generator speed, on the other hand, determines the turbine power. The inclusion of our third variable provides the controller with the freedom of tuning its action with the instantaneous generator speed. When the power error requires an increase in generator speed, and when this speed is already excessive, a moderate action on pitch angle variation can be taken. If instantaneous generator speed is not considered in the control output decision, however, a large pitch angle would be commanded. Triangle membership functions with overlaps are utilized to build the fuzzy sets of inputs, as shown in Figure 5, Figure 6 and Figure 7. The membership functions of power error and change in power error can be seen in Figure 5 and Figure 6. The membership functions of generator speed deviation are presented in Figure 7. Negative Big (NB), Positive Big (PB), Negative Medium Big (NMB), Positive Medium Big (PMB), Negative Medium (NM), Positive Medium (PM), Negative Small (NS), Positive Small (PS), Zero (ZE) are the linguistic variables. Membership function variables are unknown and calculated with the GA.
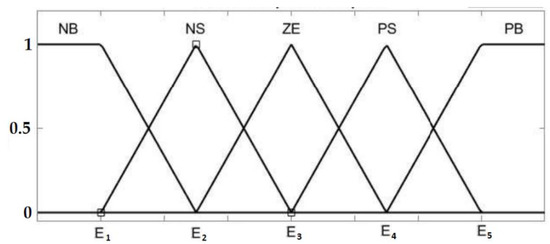
Figure 5.
Fuzzy control membership functions for generator power error.
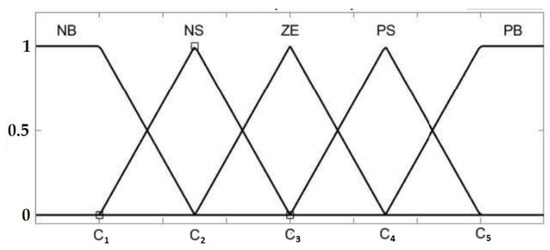
Figure 6.
Fuzzy control membership functions for change in generator power error.
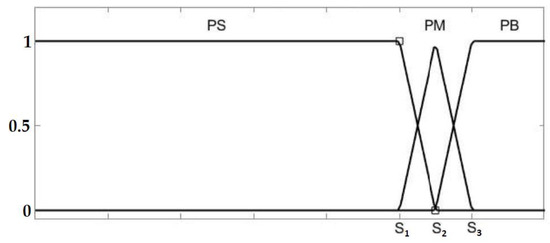
Figure 7.
Fuzzy control membership functions for deviation in generator speed.
The singleton membership functions of the output are presented in Figure 8. This figure shows negative big (NB), negative medium big (NMB), negative medium (NM), negative small (NS), zero (ZE), positive small (PS), positive medium (PM), positive medium big (PMB) and positive big (PB) rule strengths.
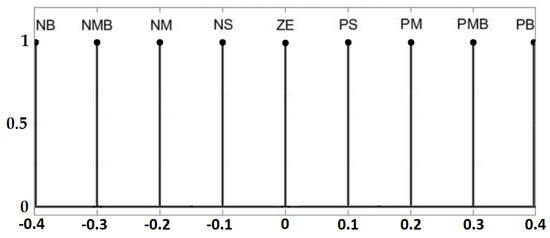
Figure 8.
Fuzzy control membership functions for output pitch angle.
Fuzzy logic rules are of the following structure:
where , , are fuzzy sets of input variables and is a fuzzy singleton corresponding to a rule strength. The fuzzy system computes the necessary change in the pitch angle in the next computational step. The final value of this angle is obtained by cumulatively adding the fuzzy system outputs each cycle.
The FLC rule base is presented as in Table 1. It reflects 75 rules ( in the structure described in (6). For instance, if generator power error value is NB, change in generator power error is NS and deviation of generator speed from its nominal value is PB, the FLC output is PS which means should be increased by 0.1 deg.

Table 1.
Fuzzy Logic Control Rules.
For each rule a truth value is computed with the product inference technique:
The necessary change in the pitch angle is computed by the center average defuzzification rule:
The output of the fuzzy logic controller is multiplied by a tuning coefficient, , to obtain the pitch angle:
The main feature of the rule base in Table 1 is to increase when the power is below the reference value, and to lower it when there is excess power. This action is, however, moderated by two factors: change of power and deviation of generator speed. If power is to be increased and the change of power is positive, is increased less when compared with the case with zero or negative change of power. Also, if the generator speed is in excess of the nominal value, power increase is targeted with a very small increase in . The overall rule base acts as a dual goal control mechanism, aiming to keep power in generator speed at their reference and nominal values, respectively.
2.4. Genetic Algorithm Optimization of Fuzzy Logic Control
A population-based algorithm is employed in GA. Each population member has a fitness value, representing the relative value of the objective function. The greater fitness value of a member, the more likely it will become a next-generation parent. Various methods, such as a roulette wheel, tournament and ranking, are utilized to choose the proper individuals from the formed population. In this study, the tournament method is employed as a selection method. Tournament selection has various advantages over other options of selection methods for genetic algorithm. It is practical to code and works on parallel architectures [50].
The crossover technique creates new population members from two existing ones. The crossover rate defines the number of population members who will be crossed. This ratio varies depending on the design process and the task at hand. The crossover ratio used is 80% in this study. This is a quite commonly implemented value in the literature, and has been selected for this reason [51].
The fitness function represents how close each member of the population is to the solution. The function tolerance value is selected as 1×10−6 as convergence criteria for the objective function, and the fitness function is selected as integral time absolute error (ITAE), defined as follows.
Here, is power error and is time. The GA optimization is utilized to compute optimum membership function values for FLC. The optimized variables can be seen in Figure 6, Figure 7, Figure 8 and Figure 9. These variables are , , , and for membership functions of power error, , , , and for membership functions of change in power error, , and for membership functions of generator speed and the scaling factor . Table 2 presents optimization results for these parameters and allowed intervals. These intervals are found with a trial-and-error method in order to find approximate regions in which the controller performs adequately.
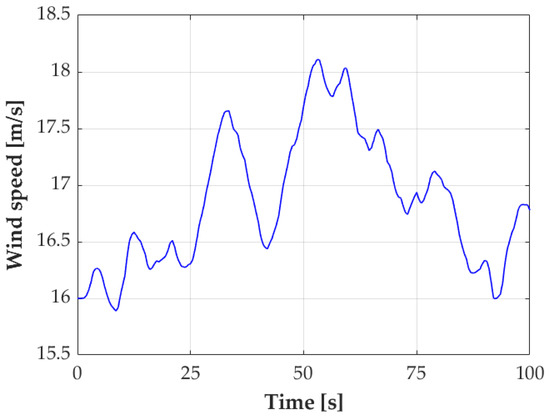
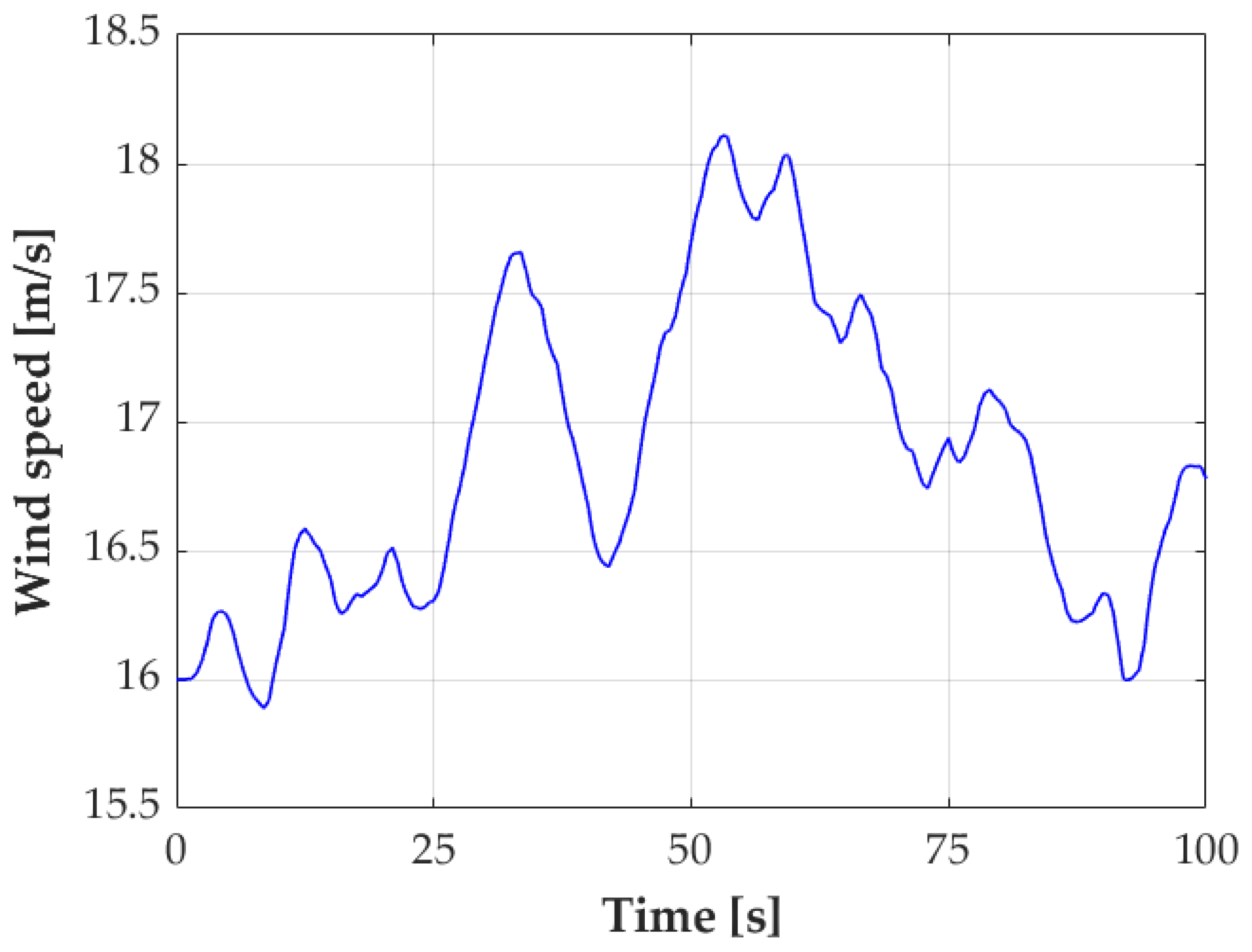
Figure 9.
Wind speed.
Table 2.
Fuzzy logic control parameters optimized by GA.
3. Implementation Results and Discussion
In this section, simulation results are presented with and without the tuning of the fuzzy control parameters by a conventional (without optimization parameters update between population iterations) GA system. Our motivation in using a straightforward (conventional) GA parameter tuning approach in this paper is as follows. A number of metaheuristic optimization techniques could be applied as alternatives to the conventional GA approach employed in this paper. Examples of these approaches are MPA (Marine Predator Algorithm) [52], PSO (Particle Swarm Optimization) [53], GSA (Gravitational Search Algorithm) [54], CS (Cuckoo Search) [55], FA (Firefly Algorithm) [56], CMA-ES (Covariance Matrix Adaptation Evolution Strategy), BO (Bonobo Optimization), BA (Bat Algorithm), BSO (Brain Storming Optimization), and TLBO (Teaching Learning Based Optimization). These approaches, as standard or with modifications, are capable of introducing online (between optimization iterations) optimization parameter updates. These updates can achieve superior convergence properties, for example, by increasing the reached fitness or by reducing the number of necessary iterations, and hence the computation time. [57] provides valuable comparison results. BO algorithm can be employed to regulate the yaw angle in the context of horizontal axis wind turbines [58]. Ref. [52] presents a MPA implementation on power flow optimization in the field of power generation. The alternative optimization technique and GA with online optimization parameter updates [59] do have the potential of outperforming the conventional GA (GA without parameter updates). However, there are a number of fuzzy control systems reported in the wind turbine control literature, many of which are tuned by conventional GA systems. Our work aims at creating another example in this category to be compared with such work. It is yet to be mentioned that the genetic tuning of a three-dimensional fuzzy control rule base contrasts the literature by adding one more complication level to the tuning task at hand. Reported in the wind energy field previously are two-dimensional fuzzy control rule bases adjusted via GA. It may also be argued that the straightforward implementation of the classical GA can be considered as a merit when compared with more complicated optimization systems.
The controller is simulated with significantly fluctuating wind data obtained from a wind field for 100 s. Table 3 shows various parameters of the turbine.
Table 3.
Turbine parameters adapted from [60].
As shown in Figure 9, region three wind speed 5 m/s over the nominal speed is simulated and the controller response is observed. Another purpose of the controller is to achieve the desired power output in the shortest time and for the most prolonged duration.
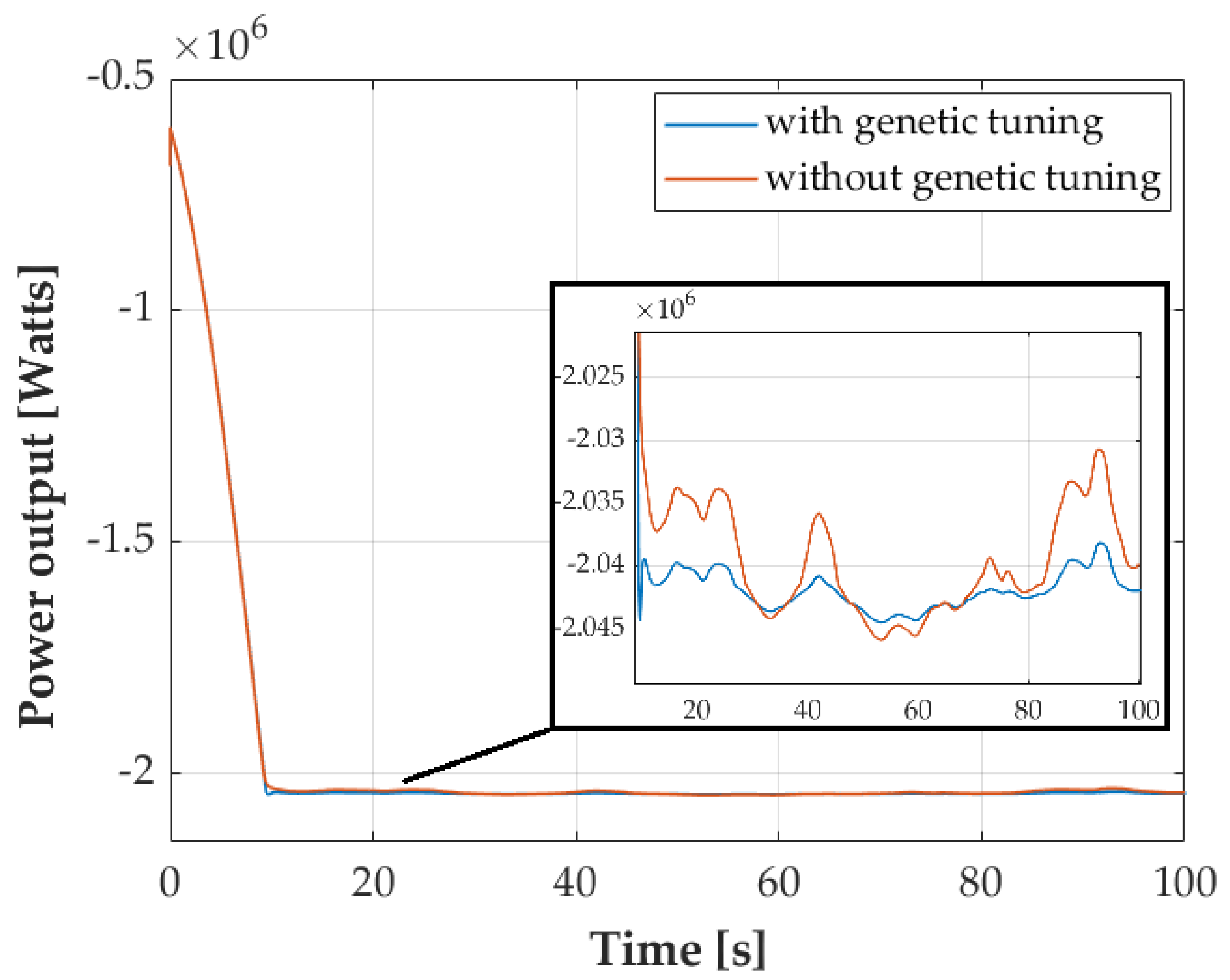
The controller performance is measured with criteria such as settling time, overshoot, rise time, and steady-state error. As presented in Figure 10, the system reaches the steady state at around 10th second with the maximum power output. The magnitude of the power fluctuations without genetic tuning are 0. 015 MW. With genetic tuning, this magnitude drops to 0.005 MW. Similar previous studies were not conducted in region three with wind speeds over 50% above the nominal wind speed [1,4]. This, however, is the case in the presented work. In this research, controller performs under highly fluctuating wind speed, whereas previous similar studies [1,4] had more steady profiles.
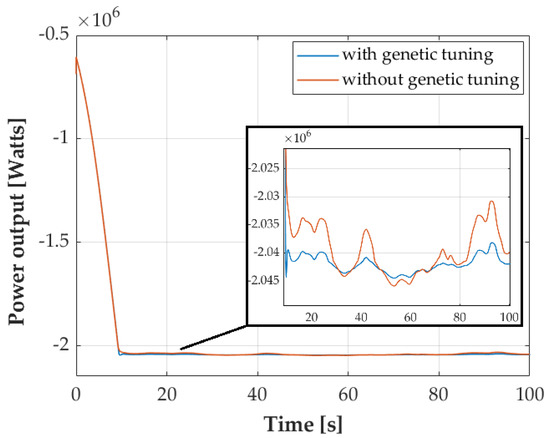
Figure 10.
Power output with (blue line) and without (red line) using genetic algorithm.
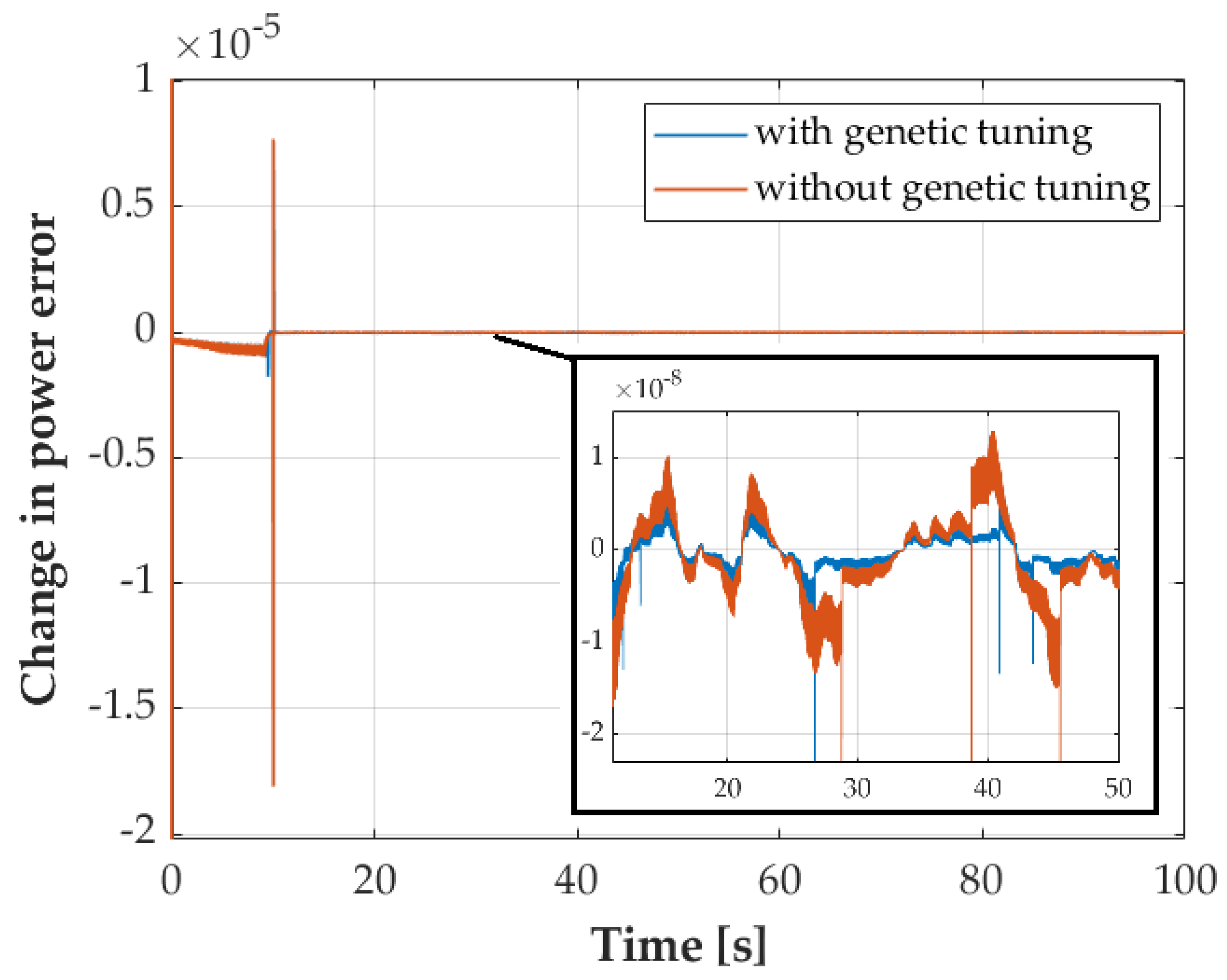
In Figure 10, the maximum power is achieved after the transient phase is completed, and the change in power error is decreased approximately 50 percent with the genetic algorithm. As presented in Figure 11, better performed overshoot in change of error in power is achieved with genetic algorithm. In study [4] which employs fuzzy logic control without genetic algorithm optimization, there are significant errors in power and power error rate of change.
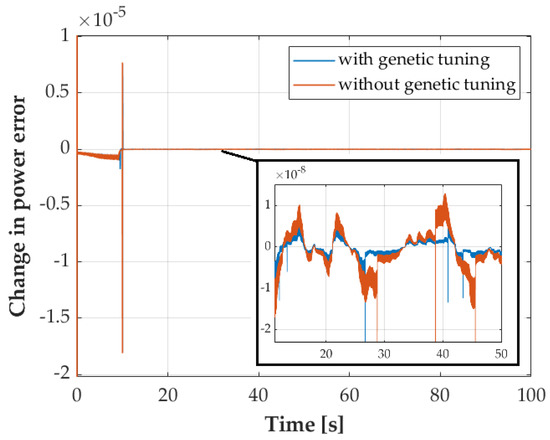
Figure 11.
Change in power error with (blue line) and without (red line) using genetic algorithm.
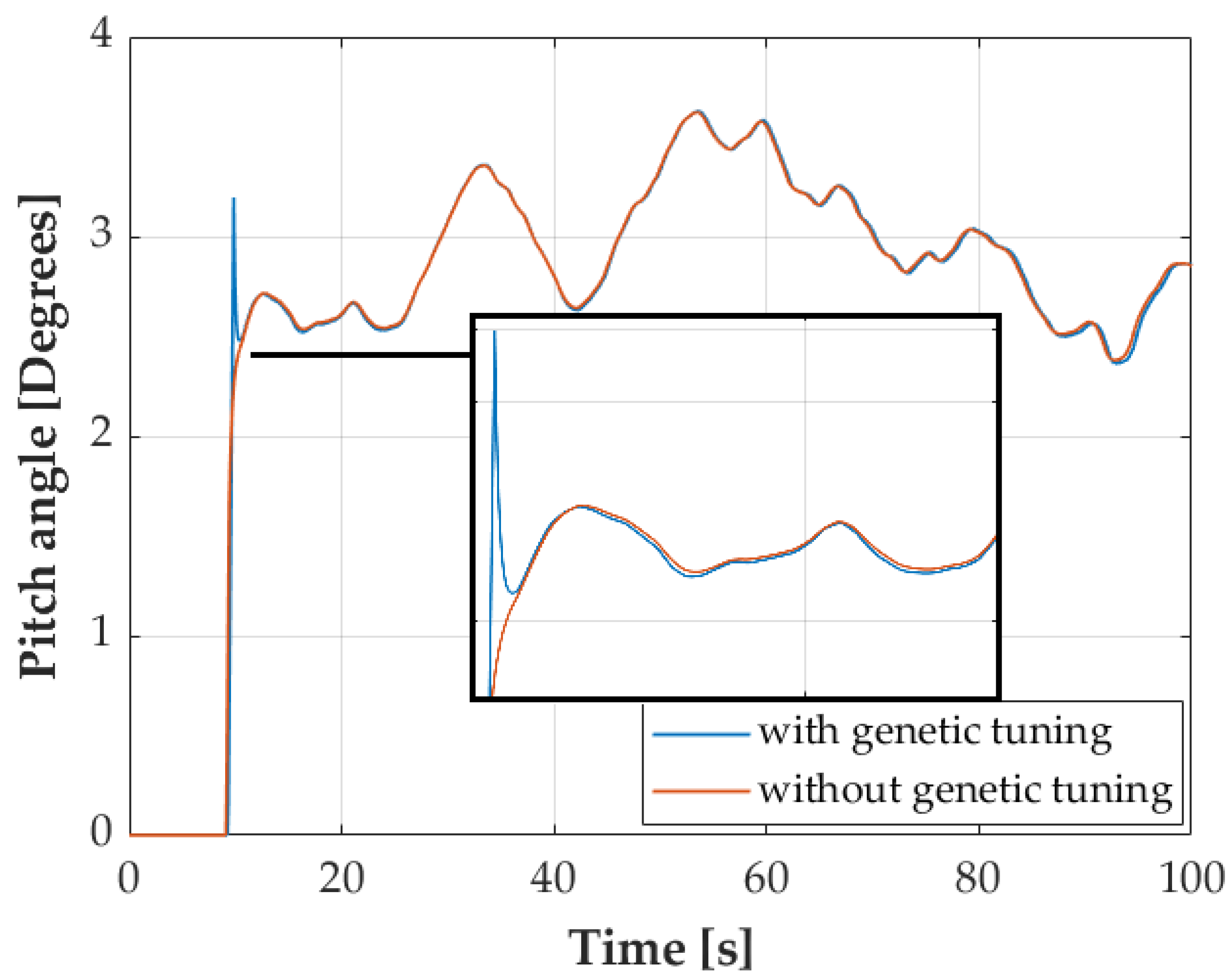
The response time of the controller is extended, and therefore after the generator rotational speed reaches 220 rpm, the controller starts acting, and the pitch angle departs from zero. After the initial step response of the pitch angle, the controller varies the pitch angle smoothly to regulate the rotational speed of the generator at 220 rpm, since this speed is the nominal speed of the 2 MW wind turbine as stated in Table 3. As the wind speed severely changes, the pitch angles of the blades react accordingly. Figure 12 depicts the controller’s output pitch angle regime with and without genetic tuning. Note that the genetic tuned results in the curve, which exhibits a peak at about the 10th second. The abrupt behavior indicates an increased control effort compared with the fuzzy controller without genetic tuning. It should be kept in mind, however, that the speed of the blades and aero-structural stability of the turbine are related. Therefore, speed limitation is applied to safeguard the system from unstable behavior. The pitch angle speed limit in our simulations is set to 5 degrees/s.
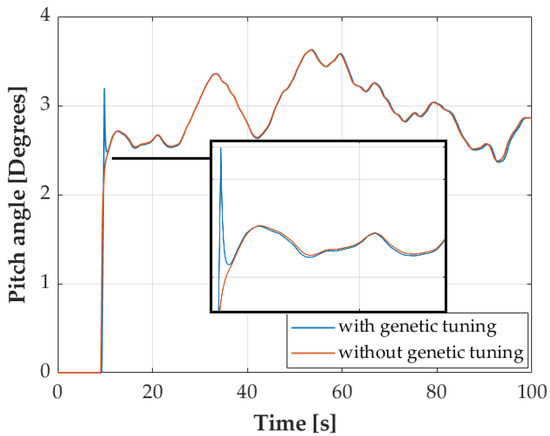
Figure 12.
Pitch angle with (blue line) and without (red line) using genetic algorithm.
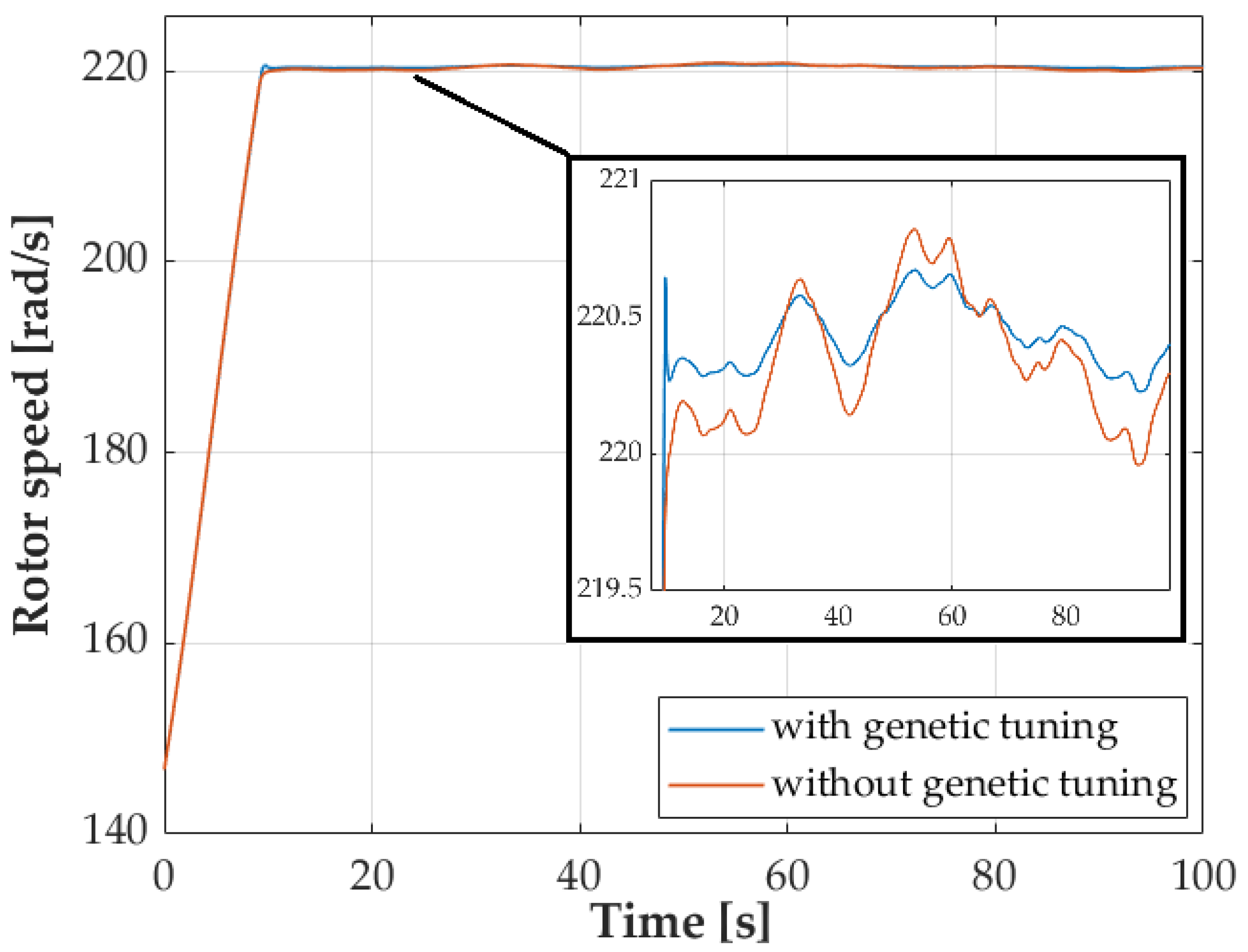
Figure 13 presents the response of the generator under the mentioned wind regime. Rotor speed fluctuations in the FLC with the GA optimization are about 0.3 rad/s, while those in the FLC without the optimization are about 0.6 rad/s. This indicates that the fluctuation problem is effectively solved by the genetic algorithm.
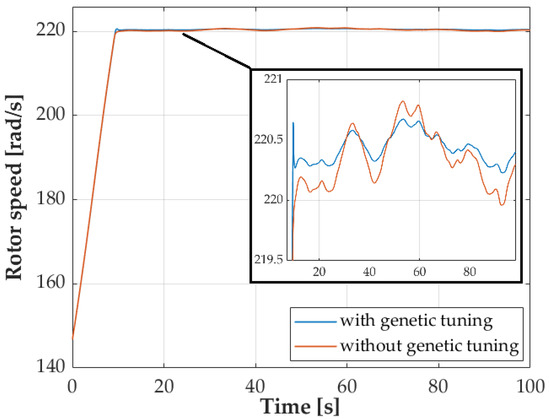
Figure 13.
Rotor speed with (blue line) and without (red line) using genetic algorithm.
Moreover, with the GA optimization over the proposed fuzzy logic controller, a controller with a shorter settling time performance when compared with the previous studies is obtained [4]. In addition, as has been indicated previously in Figure 10, Figure 11, Figure 12 and Figure 13, less fluctuation in generator speed, a smoother pitch angle curve and 30% less fluctuation in power production is achieved. The decreased settling time will increase the annual energy production.
However, the requirement of tuning with offline simulations can be considered as a disadvantage of genetic tuning methodology. This wind turbine model is very detailed and requires a moderate amount of computational power and time. Still, it is successful in tuning the fuzzy system with the three-dimensional rule base.
4. Conclusions
This study employs a DFIG configuration 2 MW wind turbine model to perform controller design with FLC techniques and genetic tuning. A novel control system is developed that uses three inputs for fuzzy logic control. Generator power error, power error rate and generator speed are used as inputs. A genetic algorithm adjusts fuzzy logic control parameters. Multiple simulations conducted in MATLAB/SIMULINK demonstrate optimized FLC performance.
Controller performance is crucial in maximizing the annual energy production. An ideal set of FLC parameters is produced by GA adjustment. With a quicker settling time and less power fluctuation, optimized FLC outperformed hand-tuned and existing conventional FLC approaches.
It is possible to think of implementation on experimental setups as future work. Also, comparisons with other optimization techniques can be carried out in simulation platforms.
Author Contributions
A.S.P. proposed the design concept, carried out simulations and genetic algorithm optimization; K.E. worked on the validity of the approach; B.B. worked on supporting simulations which aided in validating the performances after the simulation results; Authors collectively prepared the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
Research was funded by Sabanci University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
Authors declare no conflict of interest.
References
- Civelek, Z.; Lüy, M.; Çam, E.; Mamur, H. A New Fuzzy Logic Proportional Controller Approach Applied to Individual Pitch Angle for Wind Turbine Load Mitigation. Renew. Energy 2017, 111, 708–717. [Google Scholar] [CrossRef]
- Lasheen, A.; Elshafei, A.L. Wind-Turbine Collective-Pitch Control via a Fuzzy Predictive Algorithm. Renew. Energy 2016, 87, 298–306. [Google Scholar] [CrossRef]
- Iqbal, A.; Ying, D.; Saleem, A.; Hayat, M.A.; Mehmood, K. Efficacious Pitch Angle Control of Variable-Speed Wind Turbine Using Fuzzy Based Predictive Controller. Energy Rep. 2020, 6, 423–427. [Google Scholar] [CrossRef]
- Van, T.L.; Nguyen, T.H.; Lee, D.-C. Advanced Pitch Angle Control Based on Fuzzy Logic for Variable-Speed Wind Turbine Systems. IEEE Trans. Energy Convers. 2015, 30, 578–587. [Google Scholar] [CrossRef]
- Kamel, R.M.; Chaouachi, A.; Nagasaka, K. Enhancement of Micro-Grid Performance during Islanding Mode Using Storage Batteries and New Fuzzy Logic Pitch Angle Controller. Energy Convers. Manag. 2011, 52, 2204–2216. [Google Scholar] [CrossRef]
- Musyafa’, A.; Harika, A.; Negara, I.M.; Robandi, I. Pitch Angle Control of Variable Low Rated Speed Wind Turbine Using Fuzzy Logic Controller. Int. J. Eng. Technol. 2013, 10, 21–24. [Google Scholar]
- Zhang, J.; Cheng, M.; Chen, Z.; Fu, X. Pitch Angle Control for Variable Speed Wind Turbines. In Proceedings of the 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008; pp. 2691–2696. [Google Scholar]
- Elfergani, A.; Elsharif, M.A.A.; Hamd, R.H.A.; Saad, S.M.; Naily, N.E.; Mohamed, F.A. Advanced Self-Tuned Pitch Angle Control Based on Fuzzy Logic for Grid Connected Variable-Speed Wind Turbine System. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar]
- Kesraoui, M.; Lagraf, S.A.; Chaib, A. Aerodynamic Power Control of Wind Turbine Using Fuzzy Logic. In Proceedings of the 2015 3rd International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 10–13 December 2015; pp. 1–6. [Google Scholar]
- Shrinath, K.; Paramasivam, S.; Palanisamy, K. An Intelligent Self-Tuning Fuzzy Logic Controller for Pitch Angle Control for a Wind Turbine Fed Induction Generator. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–5. [Google Scholar]
- Karimi-Davijani, H.; Sheikholeslami, A.; Livani, H.; Karimi, M. Fuzzy Logic Control of Doubly Fed Induction Generator Wind Turbine. World Appl. Sci. J. 2009, 6, 499–508. [Google Scholar] [CrossRef]
- Goyal, S.; Gaur, M.; Bhandari, S. Power Regulation of a Wind Turbine Using Adaptive Fuzzy-PID Pitch Angle Controller. Int. J. Recent Technol. Eng. 2013, 2, 128–132. [Google Scholar]
- Ngo, Q.-V.; Yi, C.; Nguyen, T.-T. The Fuzzy-PID Based-Pitch Angle Controller for Small-Scale Wind Turbine. IJPEDS 2020, 11, 135. [Google Scholar] [CrossRef]
- Ali, M.M.M.; Youssef, A.-R.; Abdel-Gaber, G.; Ali, A.S. Adaptive Fuzzy-PID Based Pitch Angle Control of Wind Turbine. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; pp. 1110–1114. [Google Scholar]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Ogliari, E. Pitch Angle Control Using Hybrid Controller for All Operating Regions of SCIG Wind Turbine System. Renew. Energy 2014, 70, 197–203. [Google Scholar] [CrossRef]
- Gao, F.; Xu, D.; Lv, Y. Pitch-Control for Large-Scale Wind Turbines Based on Feed Forward Fuzzy-PI. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; 2008; pp. 2277–2282. [Google Scholar]
- Garasi, P.; Watanabe, M.; Mitani, Y. Power Smoothing of Wind Turbine Generator Using Fuzzy-PI Pitch Angle Controller. In Proceedings of the 2014 Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 28 September 2014; pp. 1–5. [Google Scholar]
- Qi, Y.; Meng, Q. The Application of Fuzzy PID Control in Pitch Wind Turbine. Energy Procedia 2012, 16, 1635–1641. [Google Scholar] [CrossRef]
- Baburajan, S. Improving the Efficiency of a Wind Turbine System Using a Fuzzy-Pid Controller. In Proceedings of the 2018 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 6 February 2018; pp. 1–5. [Google Scholar]
- Maroufi, O.; Choucha, A.; Chaib, L. Hybrid Fractional Fuzzy PID Design for MPPT-Pitch Control of Wind Turbine-Based Bat Algorithm. Electr. Eng. 2020, 102, 2149–2160. [Google Scholar] [CrossRef]
- Sahoo, S.; Subudhi, B.; Panda, G. Pitch Angle Control for Variable Speed Wind Turbine Using Fuzzy Logic. In Proceedings of the 2016 International Conference on Information Technology (ICIT), Bhubaneswar, India, 22–24 December 2016; pp. 28–32. [Google Scholar]
- Sahoo, S.; Subudhi, B.; Panda, G. Torque and Pitch Angle Control of a Wind Turbine Using Multiple Adaptive Neuro-Fuzzy Control. Wind Eng. 2020, 44, 125–141. [Google Scholar] [CrossRef]
- Veeramani, C.; Mohan, G.M. A fuzzy based pitch angle control for variable speed wind turbines. Int. J. Eng. Technol. 2013, 5, 1699–1703. [Google Scholar]
- Senjyu, T.; Sakamoto, R.; Urasaki, N.; Funabashi, T.; Sekine, H. Output Power Leveling of Wind Farm Using Pitch Angle Control with Fuzzy Neural Network. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; p. 8. [Google Scholar]
- Chen, C.H.; Hong, C.-M.; Ou, T.-C. Hybrid Fuzzy Control of Wind Turbine Generator by Pitch Control Using RNN. Int. J. Ambient Energy 2012, 33, 56–64. [Google Scholar] [CrossRef]
- Dongran, S.; Yanping, T.; Lei, W. Coordinated optimization on energy capture and torque fluctuation of wind turbine via variable weight NMPC with fuzzy regulator. Appl. Energy 2022, 312, 118821. [Google Scholar]
- Adel, M. Adaptive Sliding Mode Control for Wind Energy Experimental. System. Energies 2018, 11, 2238. [Google Scholar] [CrossRef]
- Ram, K.R.; Lal, S.P.; Ahmed, M.R. Design and Optimization of Airfoils and a 20 KW Wind Turbine Using Multi-Objective Genetic Algorithm and HARP_Opt Code. Renew. Energy 2019, 144, 56–67. [Google Scholar] [CrossRef]
- Tahani, M.; Sokhansefat, T.; Rahmani, K.; Ahmadi, P. Aerodynamic Optimal Design of Wind Turbine Blades Using Genetic Algorithm. Energy Equip. Syst. 2014, 2, 185–193. [Google Scholar] [CrossRef]
- Hall, M.; Buckham, B.; Crawford, C. Evolving Offshore Wind: A Genetic Algorithm-Based Support Structure Optimization Framework for Floating Wind Turbines. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–10. [Google Scholar]
- Attia, A.-F.; Soliman, H.; Sabry, M. Genetic Algorithm Based Control System Design of a Self-Excited Induction Generator. Acta. Polytech. 2006, 46, 8. [Google Scholar] [CrossRef]
- Ali, E.S. Speed Control of Induction Motor Supplied by Wind Turbine via Imperialist Competitive Algorithm. Energy 2015, 89, 593–600. [Google Scholar] [CrossRef]
- Das, D.C.; Roy, A.; Sinha, N.; Member, S. Genetic Algorithm Based PI Controller for Frequency Control of an Autonomous Hybrid Generation System. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, 16–18 March 2011. [Google Scholar]
- Lara, M.; Garrido, J.; Ruz, M.L.; Vázquez, F. Adaptive Pitch Controller of a Large-Scale Wind Turbine Using Multi-Objective Optimization. Appl. Sci. 2021, 11, 2844. [Google Scholar] [CrossRef]
- Zahra, B.; Salhi, H.; Mellit, A. Wind Turbine Performance Enhancement by Control of Pitch Angle Using PID Controller and Particle Swarm Optimization. In Proceedings of the 2017 5th International Conference on Electrical Engineering-Boumerdes (ICEE-B), Boumerdes, Algeria, 29–31 October 2017; pp. 1–5. [Google Scholar]
- Lee, J.; Son, E.; Hwang, B.; Lee, S. Blade Pitch Angle Control for Aerodynamic Performance Optimization of a Wind Farm. Renew. Energy 2013, 54, 124–130. [Google Scholar] [CrossRef]
- Belghazi, O.; Cherkaoui, M. Pitch Angle Control for Variable Speed Wind Turbines Using Genetic Algorithm Controller. J. Theor. Appl. Inf. Technol. 2012, 39, 6–10. [Google Scholar]
- Belghazi, O.; Douiri, M.R.; Cherkaoui, M. Power control of a wind energy based on a DFIG by sliding mode approach and pitch angle optimal control by genetic algorithm. J. Achiev. Mater. Manuf. Eng. 2016, 74, 78–85. [Google Scholar] [CrossRef]
- Paraschivoiu, I.; Trifu, O.; Saeed, F. H-Darrieus Wind Turbine with Blade Pitch Control. Int. J. Rotat. Mach. 2009, 2009, 1–7. [Google Scholar] [CrossRef]
- Li, D.-Y.; Cai, W.-C.; Li, P.; Jia, Z.-J.; Chen, H.-J.; Song, Y.-D. Neuroadaptive Variable Speed Control of Wind Turbine with Wind Speed Estimation. IEEE Trans. Ind. Electron. 2016, 63, 7754–7764. [Google Scholar] [CrossRef]
- Gonzalez, J.S.; Payan, M.B. Jesus Riquelme Santos Optimum Wind Turbines Operation for Minimizing Wake Effect Losses in Offshore Wind Farms. In Proceedings of the 2013 13th International Conference on Environment and Electrical Engineering (EEEIC), Wroclaw, Poland, 1–3 November 2013; pp. 188–192. [Google Scholar]
- Vrionis, T.D.; Koutiva, X.I.; Vovos, N.A. A Genetic Algorithm-Based Low Voltage Ride-Through Control Strategy for Grid Connected Doubly Fed Induction Wind Generators. IEEE Trans. Power Syst. 2014, 29, 1325–1334. [Google Scholar] [CrossRef]
- Attia, A.-F.; Al-Turki, Y.A.; Soliman, H.F. Genetic Algorithm-Based Fuzzy Controller for Improving the Dynamic Performance of Self-Excited Induction Generator. Arab. J. Sci. Eng. 2012, 37, 665–682. [Google Scholar] [CrossRef]
- Lotfy, M.; Senjyu, T.; Farahat, M.; Abdel-Gawad, A.; Lei, L.; Datta, M. Hybrid Genetic Algorithm Fuzzy-Based Control Schemes for Small Power System with High-Penetration Wind Farms. Appl. Sci. 2018, 8, 373. [Google Scholar] [CrossRef]
- Burakov, M.; Shishlakov, V. Genetic Algorithm Optimization for Pitch Angle Control of Variable Speed Wind Turbines. MATEC Web Conf. 2017, 113, 01009. [Google Scholar] [CrossRef]
- Zheng, S.-G.; Chang, C.-K.; Pan, J.-S. Double Fuzzy Pitch Controller of Wind Turbine Designed by Genetic Algorithm. In Proceedings of the 2020 International Automatic Control Conference (CACS), Hsinchu, Taiwan, 4 November 2020; IEEE: Hsinchu, Taiwan; pp. 1–5. [Google Scholar]
- Civelek, Z. Optimization of Fuzzy Logic (Takagi-Sugeno) Blade Pitch Angle Controller in Wind Turbines by Genetic Algorithm. Eng. Sci. Technol. Int. J. 2020, 23, 1–9. [Google Scholar] [CrossRef]
- Frede, B.; Dan, M.I. Renewable Energy Devices and Systems with Simulations in MATLAB and Ansys; Taylor& Francis Group, CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Paul, M.-G.; Hamane, B.; Mamadou, D. Pitch Control of a Wind Energy Conversion System Based on Permanent Magnet Synchronous Generator (PMGS). In Proceedings of the 2015 Tenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 1 November 2015. [Google Scholar] [CrossRef]
- Miller, B.L.; Goldberg, D.E. Genetic Algorithms, Tournament Selection, and the Effects of Noise. Complex Syst. 1995, 9, 193–212. [Google Scholar]
- Hasanat, A.; Almohammadi, K.; Alkafaween, E.; Abunawas, E.; Hammouri, A.; Prasath, V.B.S. Choosing Mutation and Crossover Ratio for Genetic Algorithms-A review with a New Dynamic Approach. Information 2019, 10, 309. [Google Scholar] [CrossRef]
- Mohamat, F.; Kamel, S.; Atallah, A.M.; Khan, B. Developing a marine predator algorithm for optimal power flow analysis considering uncertainty of renewable energy sources. Int. Trans. Electr. Energy Syst. 2022, 2022, 3714475. [Google Scholar] [CrossRef]
- Xueming, Y.; Yuan, J.; Yuan, J.; Mao, H. A modified particle swarm optimizer with dynamic adaptation. Appl. Math. Comput. 2007, 189, 1205–1213. [Google Scholar] [CrossRef]
- Esmat, R.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Xin, S.; Suash, D. Cuckoo Search via Levy Flights. In Proceedings of the World Congress on Nature & Biologically Inspired Computing (NaBIC 2009), Coimbatore, India, 9–11 December 2009. [Google Scholar]
- Nur, J.; Zain, A.M.; Noorfa, M.H.; Udin, A. Firefly algorithm for optimization problem. Appl. Mech. Mater. 2013, 421, 512–517. [Google Scholar] [CrossRef]
- Afshin, F.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine predators algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Dongran, S.; Li, Z.; Wang, L.; Jin, F.; Huang, C.; Xia, E.; Rizk-Allah, R.M.; Yang, J.; Su, M.; Joo, Y.H. Energy capture efficiency enhancement of wind turbiness via stochastic model predictive yaw control based on intelligent scenarios generation. Appl. Energy 2022, 312, 118773. [Google Scholar] [CrossRef]
- Amit, K.D.; Dilip, K.P. A directional crossover (DX) operator for a real parameter optimization using genetic algorithm. Appl. Intell. 2019, 49, 1841–1865. [Google Scholar] [CrossRef]
- Pehlivan, A.S.; Erbatur, K. Performance Comparison of Pitch Angle Controllers for 2MW Wind Turbine. In Proceedings of the ICSEEC: Sustainable Energy and Energy Calculations, International Conference on Sustainable Energy and Energy Cal-culations Organized by Turkish-German University, Istanbul, Turkey, 4–5 September 2020. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).