
An Improved Charge-Based Method Extended to Estimating Appropriate Dead Time for Zero-Voltage-Switching Analysis in Dual-Active-Bridge Converter


Abstract
:1. Introduction
2. Unified Equivalent Circuit for Switching Instant in DAB Converters
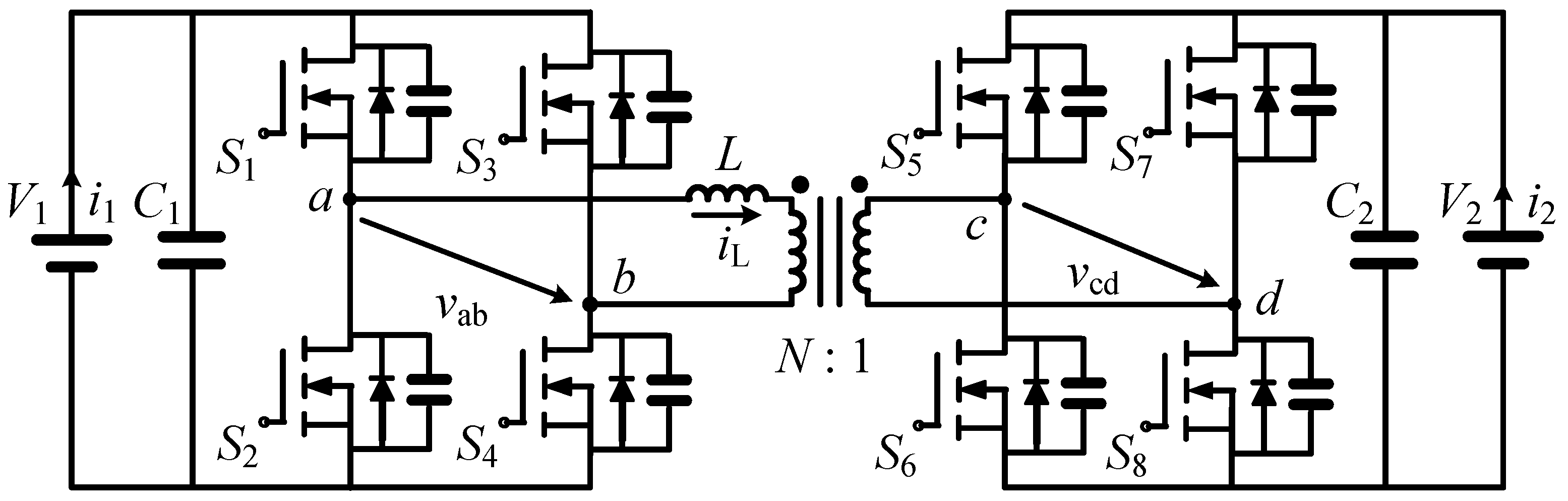
2.1. Model of Dual-Active-Bridge Converter
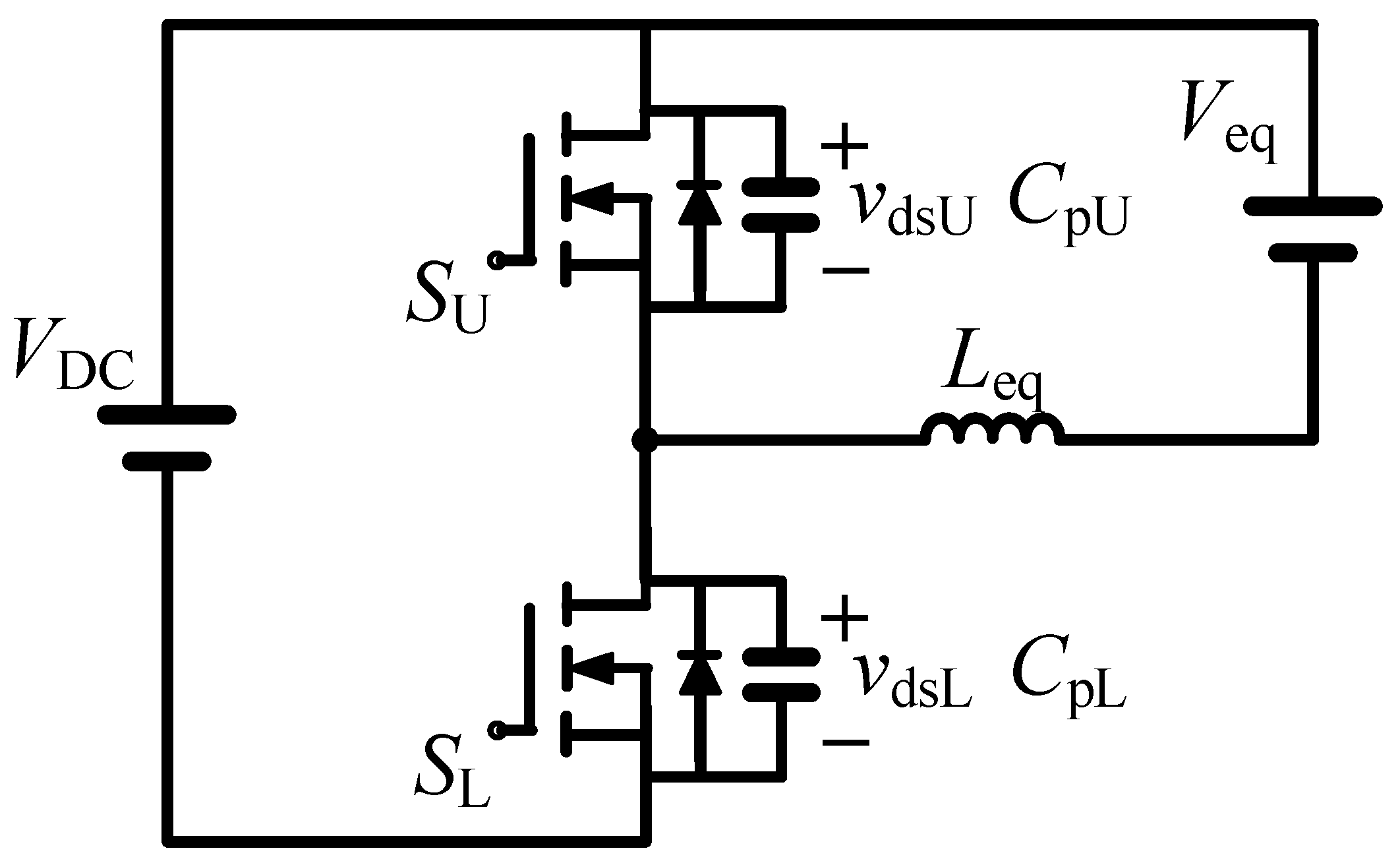
2.2. Unified Equivalent Circuit
3. Improved Charge-Based Method and Dead-Time Estimation
3.1. Concept of Minimal Switching Current
3.2. Derivation of Minimal Switching Current
3.3. Lowest Switching Current Control
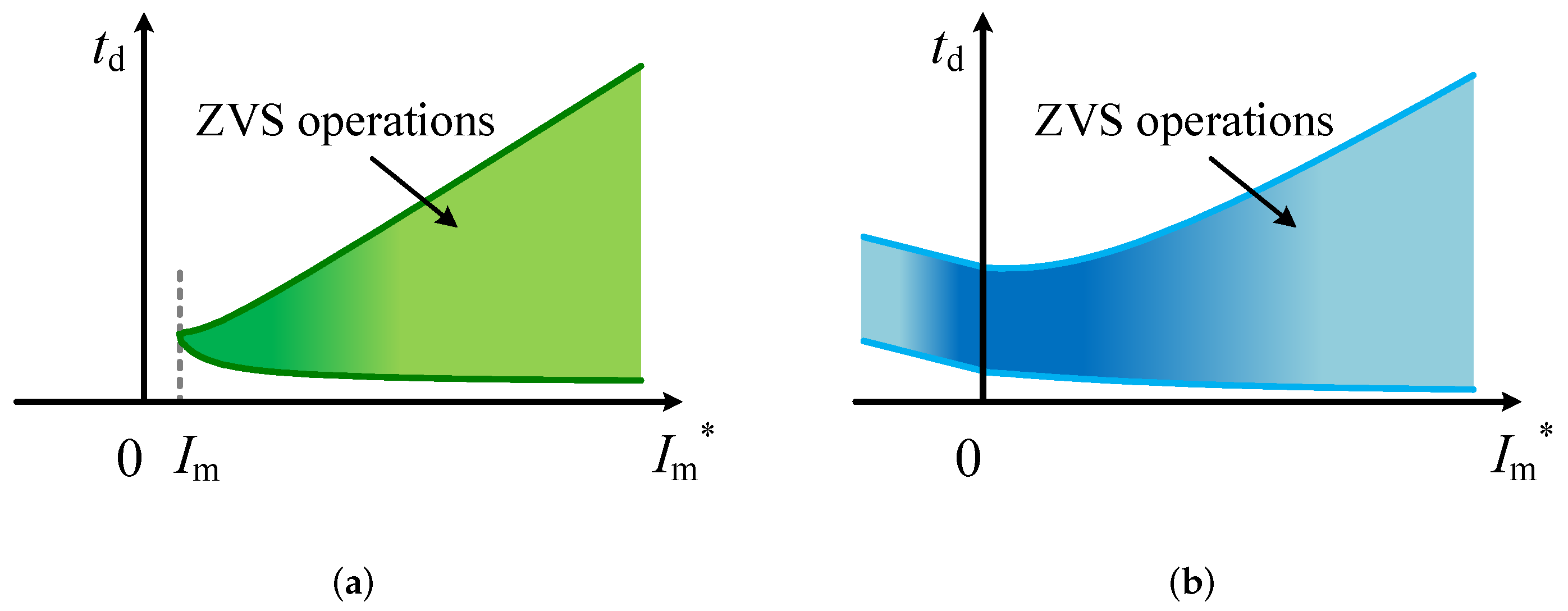
3.4. Range of Dead-Time Duration for ZVS
4. Experimental Verification of ZVS Realization
4.1. Experimental Setup
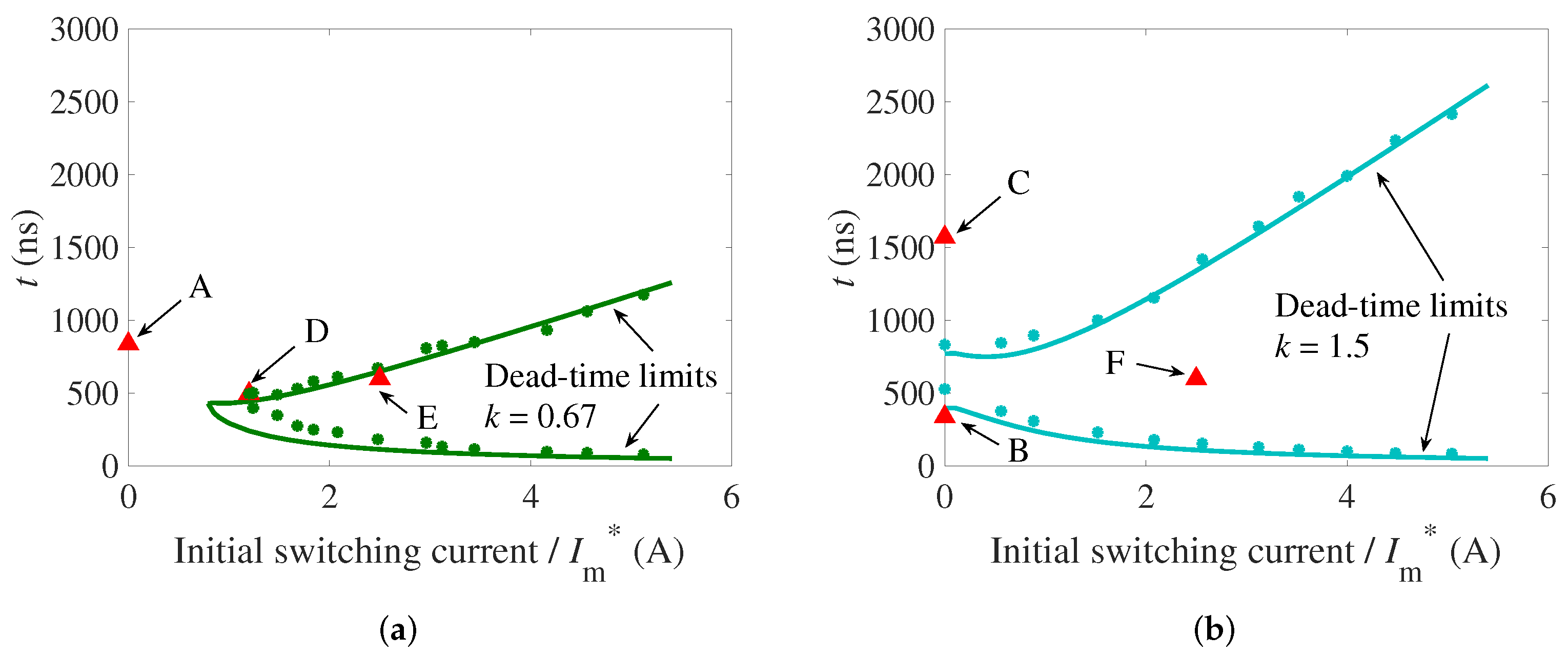
4.2. Estimation of Minimal Switching Current and Dead-Time Range for ZVS
4.3. Verification of ZVS Realization with Lowest Switching Current Control
4.3.1. Operations without Lowest Switching Current Control
4.3.2. Verification of Dead-Time Range for ZVS
4.3.3. Operations with Lowest Switching Current Control and Designed Dead Time
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Inoue, S.; Akagi, H. A bidirectional isolated dc-dc converter as a core circuit of the next-generation medium-voltage power conversion system. IEEE Trans. Power Electron. 2007, 22, 535–542. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Delarue, P.; Moigne, P.L.; Bartholomeus, P. A bidirectional three-level dc-dc converter for the ultracapacitor applications. IEEE Trans. Ind. Electron. 2010, 57, 3415–3520. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, W. Current-stress-optimized switching strategy of isolated bidirectional dc-dc converter with dual-phase-shift control. IEEE Trans. Ind. Electron. 2013, 60, 4458–4467. [Google Scholar] [CrossRef]
- Chen, B.; Lai, Y. Switching control technique of phase-shift-controlled full-bridge converter to improve efficiency under light-load and standby conditions without additional auxiliary components. IEEE Trans. Power Electron. 2010, 25, 1001–1012. [Google Scholar] [CrossRef]
- Guidi, G.; Kawamura, A.; Sasaki, Y.; Imakubo, T. Dual active bridge modulation with complete zero voltage switching taking resonant transitions into account. EPE J. 2012, 22, 5–12. [Google Scholar] [CrossRef]
- Yan, Y.; Bai, H.; Yang, C.; Wang, W. Securing full-load-range zero voltage switching for a dual active bridge based electric vehicle charger. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 2067–2072. [Google Scholar]
- Qu, Y.; Shu, W.; Kuan, Y.; Chiang, S.; Chang, J. A low-profile high-efficiency fast battery charger with unifiable constant-current and constant-voltage regulation. IEEE Trans. Circuits Syst.-I Regul. Pap. 2020, 67, 4099–4109. [Google Scholar] [CrossRef]
- Akihiro, M.; Isobe, T.; Terazono, K.; Tadano, H. Unbalanced load compensation for solid-state transformer using smoothing capacitors of cascaded h-bridges as energy buffer. In Proceedings of the IECON 2019, 45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 6779–6786. [Google Scholar]
- Higa, H.; Itoh, J. Extendsion of zero-voltage-switching range in dual active bridge converter by switched auxiliary inductance. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 5324–5331. [Google Scholar]
- Rodriguez, A.; Vázquez, A.; Lamar, D.G.; Hernando, M.M.; Sebastián, J. Different purpose design strategies and techniques to improve the performance of a dual active bridge with phase-shift-control. IEEE Trans. Power Electron. 2015, 31, 790–804. [Google Scholar] [CrossRef]
- Haneda, R.; Akagi, H. Design and performance of the 850-V 100-kW 16-kHz bidirectional isolated dc-dc conveter using SiC-MOSTEFT/SBD H-bridge modules. IEEE Trans. Power Electron. 2020, 35, 10013–10025. [Google Scholar] [CrossRef]
- Oggier, G.G.; Ordonez, M. High-efficiency DAB converter using switching sequences and burst mode. IEEE Trans. Power Electron. 2016, 31, 2069–2082. [Google Scholar] [CrossRef]
- Guidi, G.; Pavlovsky, M.; Kawamura, A.; Imakubo, T.; Sasaki, Y. Improvement of light load efficiency of dual active bridge dc-dc converter by using dual leakage transformer and variable frequency. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition (ECCE), Atlanta, GA, USA, 12–16 September 2010; pp. 830–837. [Google Scholar]
- He, X.; Zhang, Z.; Cai, Y.; Liu, Y. A variable switching frequency hybrid control for ZVS dual active bridge converters to achieve high efficiency in wide load range. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 16–20 March 2014; pp. 1095–1099. [Google Scholar]
- Hiltunen, J.; Väisänen, V.; Juntunen, R.; Silventoinen, P. Variable-frequency phase shift modulation of a dual active bridge converter. IEEE Trans. Power Electron. 2015, 30, 7138–7148. [Google Scholar] [CrossRef]
- Oggier, G.G.; Leidhold, R.; Garcia, G.O.; Oliva, A.R.; Balda, J.C.; Barlow, F. Extending the ZVS operating range of dual active bridge high-power dc-dc converters. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–7. [Google Scholar]
- Iyer, V.M.; Gulur, S.; Bhattacharya, S. Hybrid control strategy to extend the ZVS range of a dual active bridge converter. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 2035–2042. [Google Scholar]
- Liu, B.; Davari, P.; Blaabjerg, F. An Optimized Control Scheme for Reducing Conduction and Switching Losses in Dual Active Bridge Converters. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 622–629. [Google Scholar]
- Das, A.K.; Fernandes, B.G. Fully ZVS, minimum RMS current operation of isolated dual active bridge dc-dc converter employing dual phase-shift control. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE’19 ECCE Curope), Genova, Italy, 3–5 September 2019; pp. 1–10. [Google Scholar]
- Calderon, C.; Barrado, A.; Rodriguez, A.; Alou, P.; Lazaro, A.; Fernandez, C.; Zumel, P. General analysis of switching modes in dual active bridge with triple phase shift modulation. Energies 2018, 11, 2419. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Sha, D.; Zhang, J.; Liao, X. Unified boundary trapezoidal modulation control utilizing fixed duty cycle compensation and magnetizing current design for dual active bridge dc-dc converter. IEEE Trans. Power Electron. 2016, 32, 2243–2252. [Google Scholar] [CrossRef]
- Kasper, M.; Burkart, R.M.; Deboy, G.; Kolar, J.W. ZVS of power mosfets revisited. IEEE Trans. Power Electron. 2016, 31, 8063–8067. [Google Scholar] [CrossRef]
- Zhang, H.; Akihiro, M.; Mannen, T.; Isobe, T. An optimized scheme for current stress reduction with zero-voltage switching in dual-active-bridge converters under varying input voltage. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 1223–1230. [Google Scholar]
- Yan, Y.; Gui, H.; Bai, H. Complete ZVS Analysis in dual-active-bridge. IEEE Trans. Power Electron. 2020, 36, 1247–1252. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Switching | Switching | Device in | ||
|---|---|---|---|---|---|
| Leg | Motion | Adjacent Leg | |||
| 1 | left | upper on | + | ||
| 2 | − | ||||
| 3 | turns on, | 0 | 0 | ||
| 4 | turns off | lower on | + | refer to #8 | |
| 5 | − | refer to #7 | |||
| 6 | 0 | refer to #9 | |||
| 7 | upper on | + | |||
| 8 | − | ||||
| 9 | turns off, | 0 | 0 | ||
| 10 | turns on | lower on | + | refer to #2 | |
| 11 | − | refer to #1 | |||
| 12 | 0 | refer to #3 | |||
| 13 | right | upper on | + | ||
| 14 | − | ||||
| 15 | turns on, | 0 | 0 | ||
| 16 | turns off | lower on | + | refer to #20 | |
| 17 | − | refer to #19 | |||
| 18 | 0 | refer to #21 | |||
| 19 | upper on | + | |||
| 20 | − | ||||
| 21 | turns off, | 0 | 0 | ||
| 22 | turns on | lower on | + | refer to #14 | |
| 23 | − | refer to #13 | |||
| 24 | 0 | refer to #15 |
| Rated power | P | 4 kW |
| Switching frequency | 20 kHz | |
| Input voltage | 270 V () | |
| 400 V () | ||
| Output voltage | 400 V () | |
| 270 V () | ||
| Leakage inductance | L | 61 H |
| Transformer winding ratio | ||
| Type of devices | C3M0025065D |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Isobe, T. An Improved Charge-Based Method Extended to Estimating Appropriate Dead Time for Zero-Voltage-Switching Analysis in Dual-Active-Bridge Converter. Energies 2022, 15, 671. https://doi.org/10.3390/en15020671
Zhang H, Isobe T. An Improved Charge-Based Method Extended to Estimating Appropriate Dead Time for Zero-Voltage-Switching Analysis in Dual-Active-Bridge Converter. Energies. 2022; 15(2):671. https://doi.org/10.3390/en15020671
Chicago/Turabian StyleZhang, Haoyu, and Takanori Isobe. 2022. "An Improved Charge-Based Method Extended to Estimating Appropriate Dead Time for Zero-Voltage-Switching Analysis in Dual-Active-Bridge Converter" Energies 15, no. 2: 671. https://doi.org/10.3390/en15020671
APA StyleZhang, H., & Isobe, T. (2022). An Improved Charge-Based Method Extended to Estimating Appropriate Dead Time for Zero-Voltage-Switching Analysis in Dual-Active-Bridge Converter. Energies, 15(2), 671. https://doi.org/10.3390/en15020671