
A Novel Hybrid Excitation Doubly Salient Generator with Separated Windings by PM Inserted in Stator Slot for HEVs

Abstract
:1. Introduction
2. Geometry and Flux Regulation Principle of the Proposed HEDSGSW
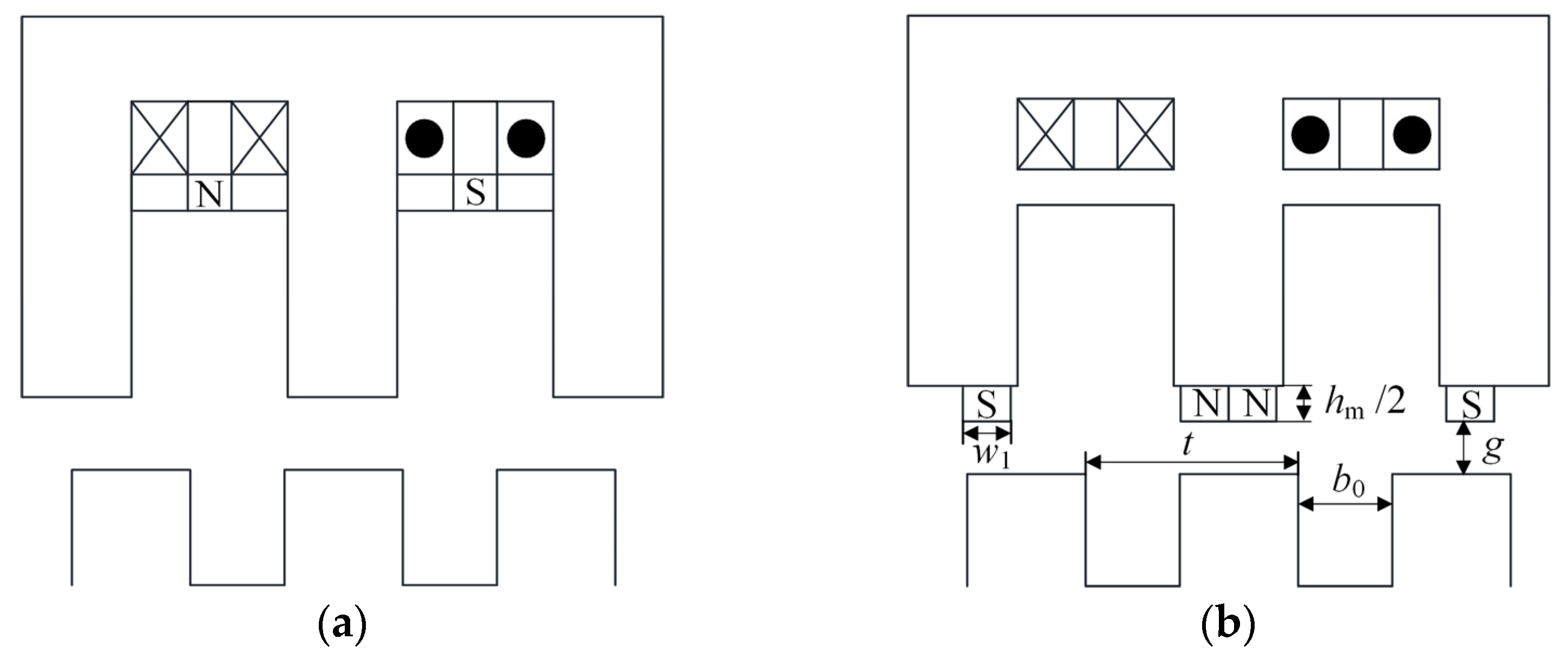
2.1. Geometry
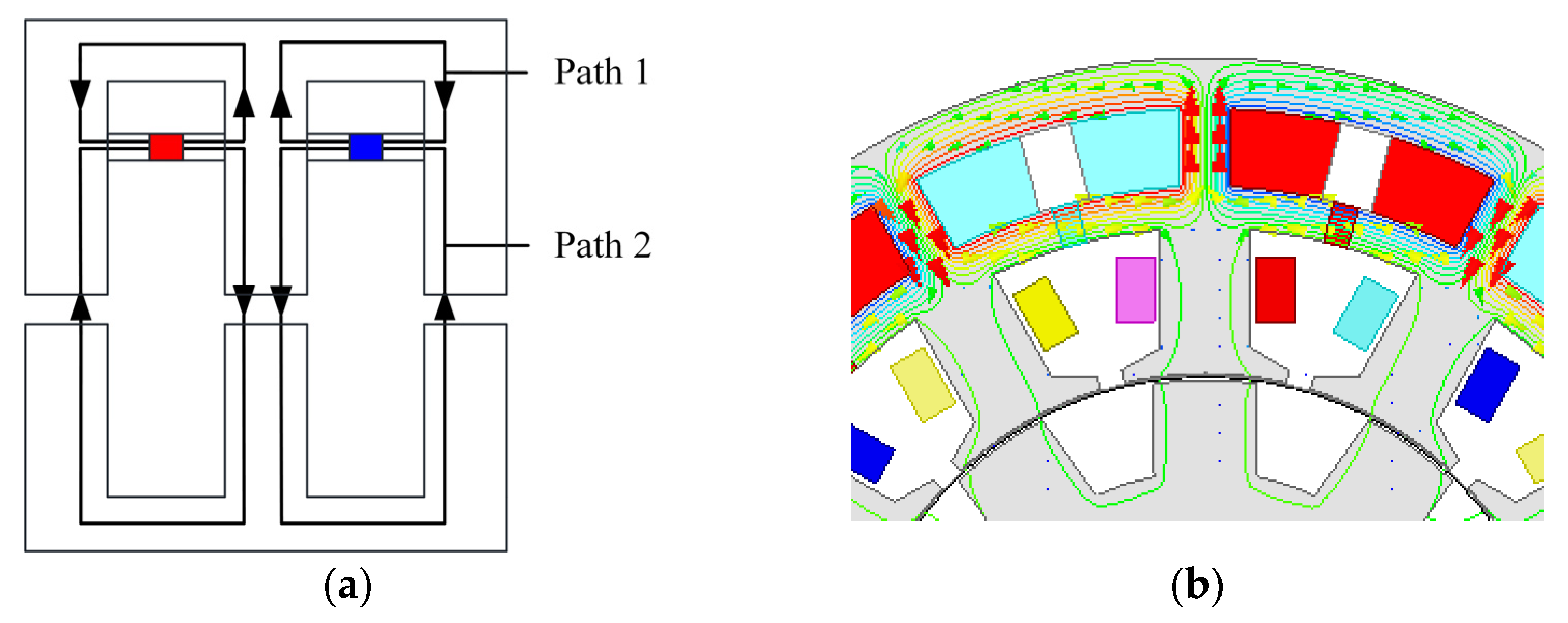
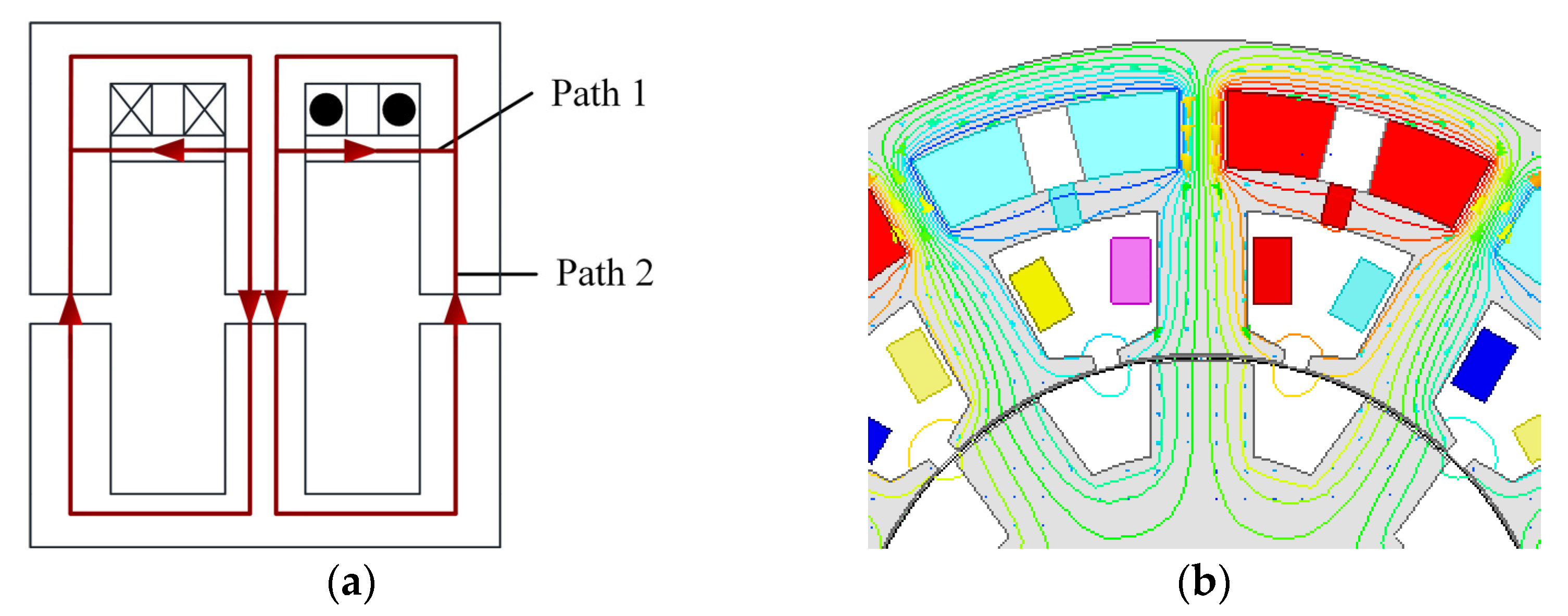
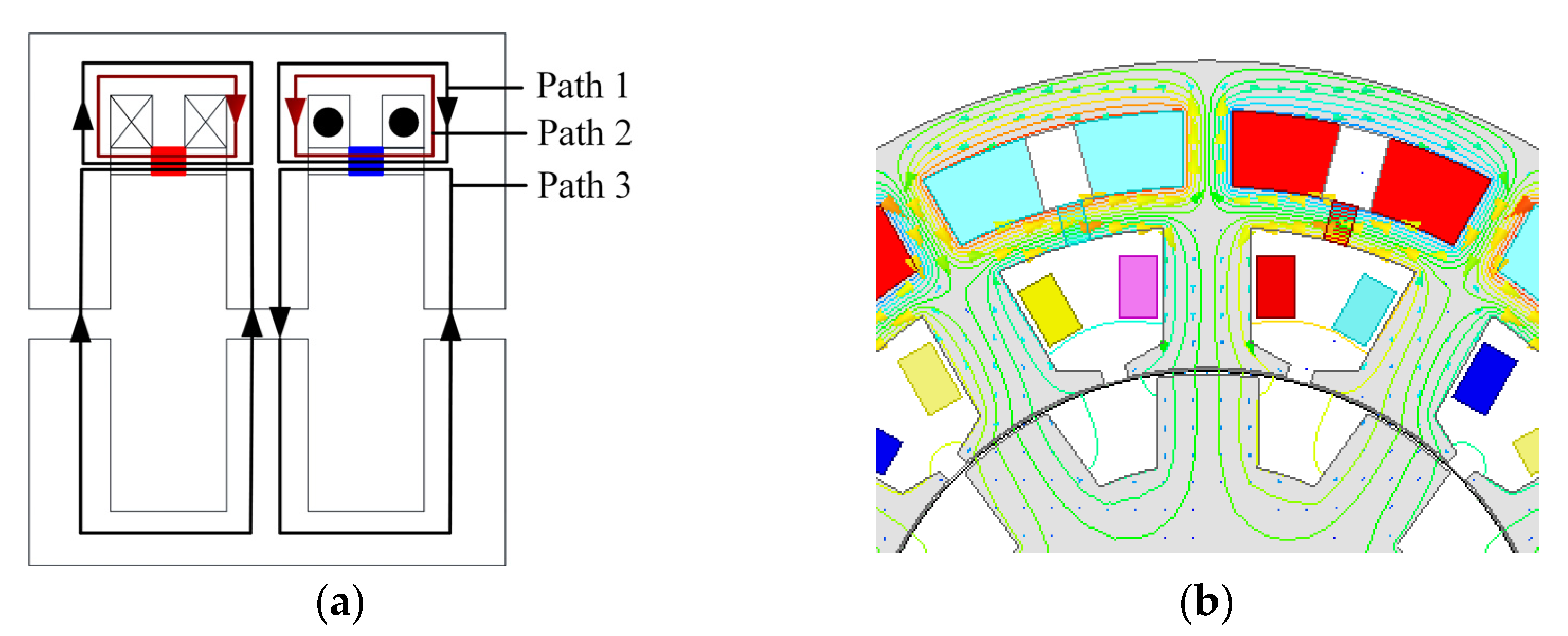
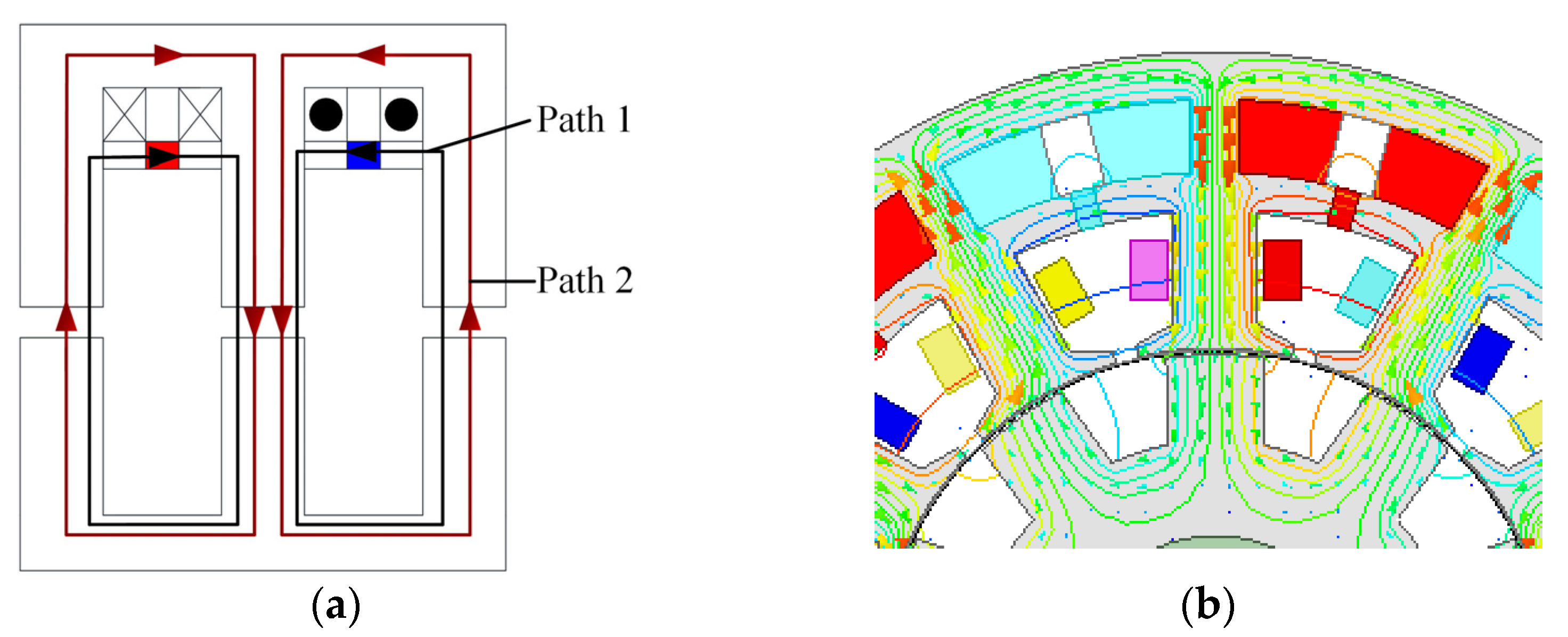
2.2. Magnetic Flux Regulation Principle
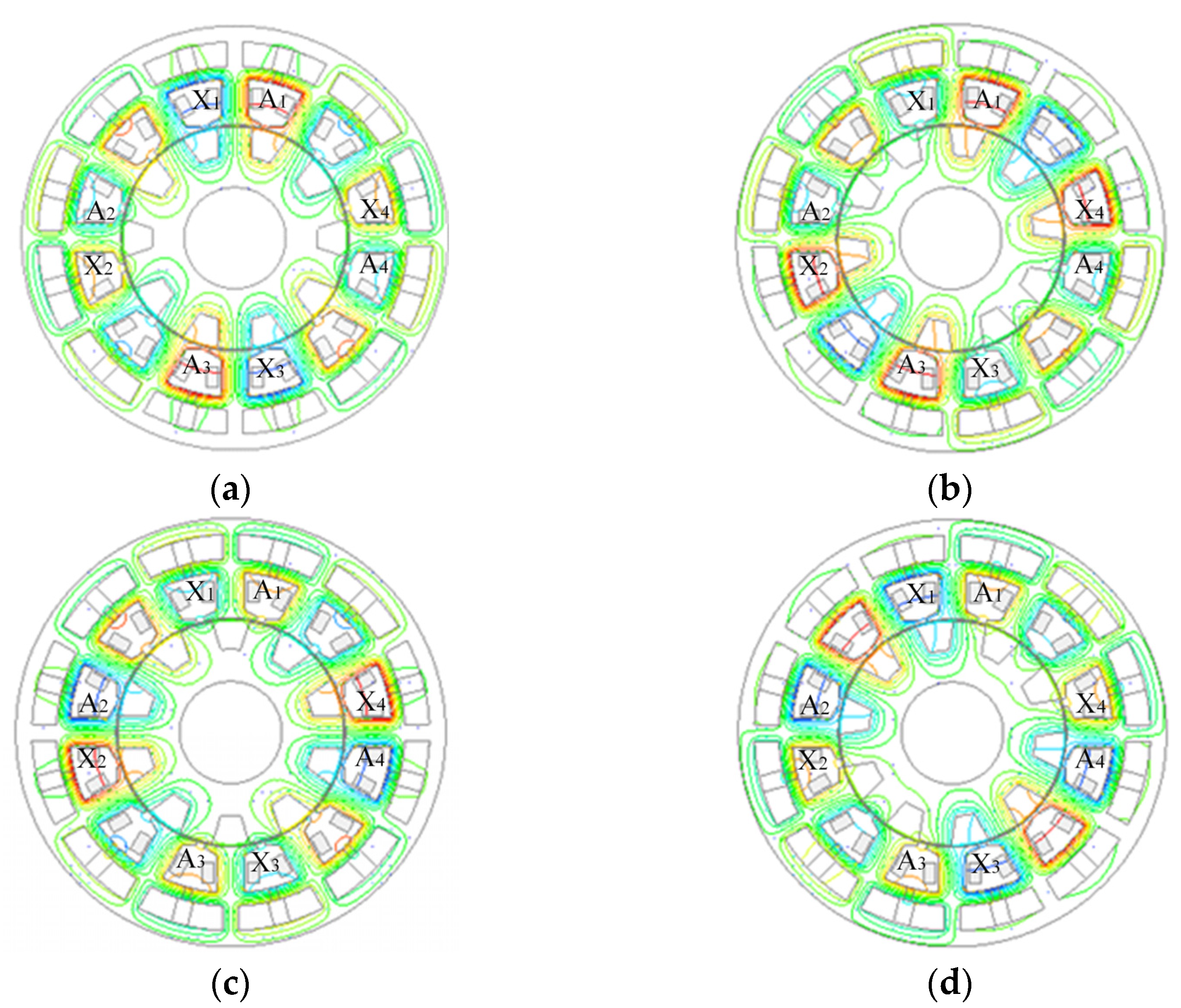
2.3. Overall Magnetic Flux Distribution
3. Analysis of Generation Mode
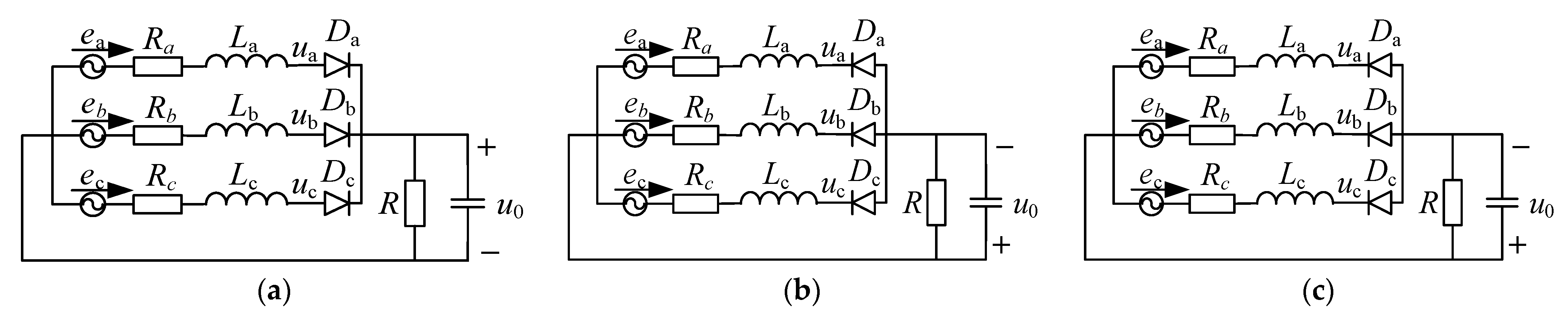
3.1. Principle of Three Generating Modes
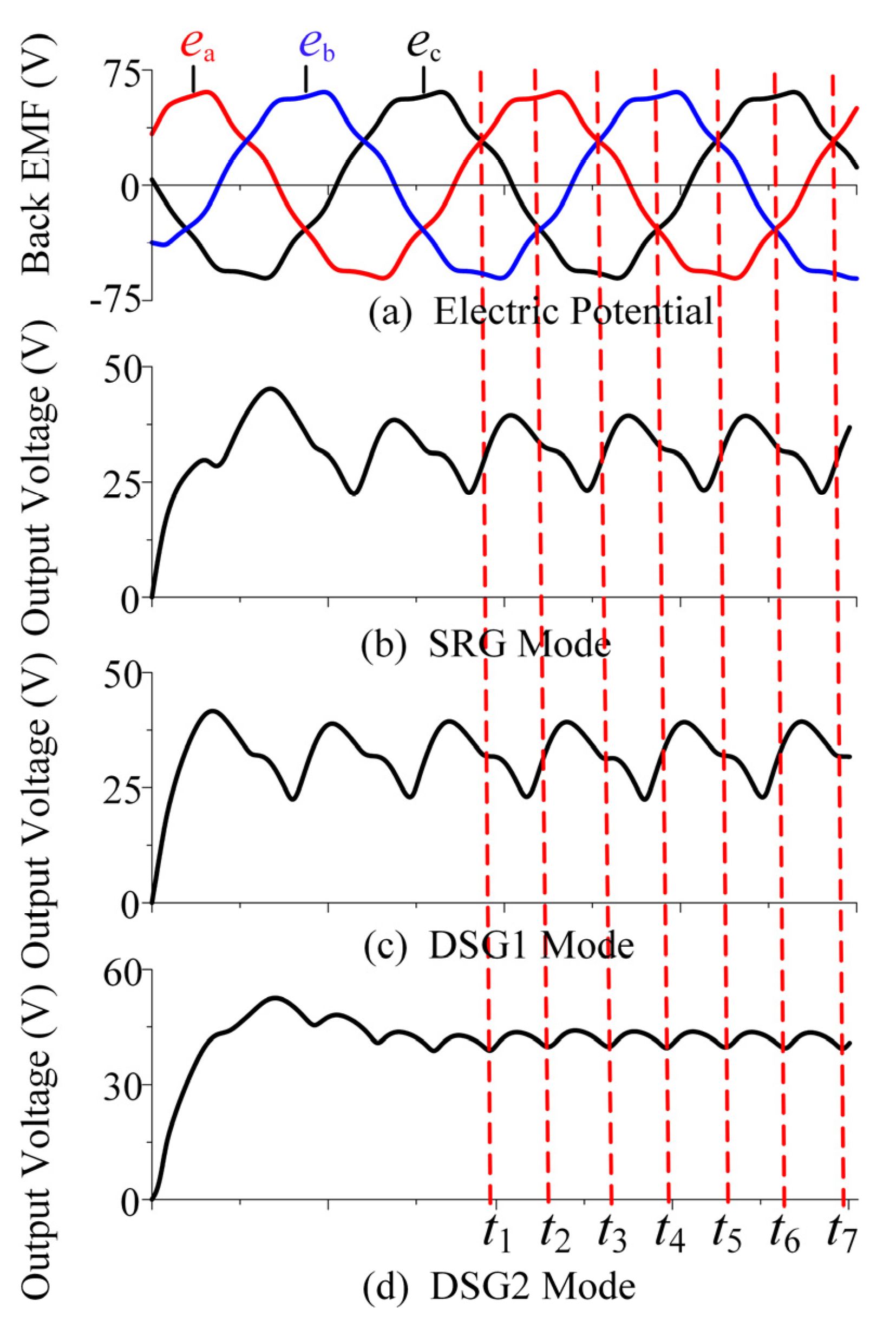
3.2. Comparison of Three Generation Modes
4. Analytical Model of Back EMF
- Core saturation is ignored;
- End effects and edge effects are ignored;
- The air-gap magnetic field changes along the tangential direction and remains unchanged along the radial direction.
4.1. Relative Magnetic Permeance of Air Gap
4.2. Magnetic Potential
4.3. Magnetic Flux Density and Back EMF
5. Model Evaluation and Working Performance Analysis
5.1. FEA Verification
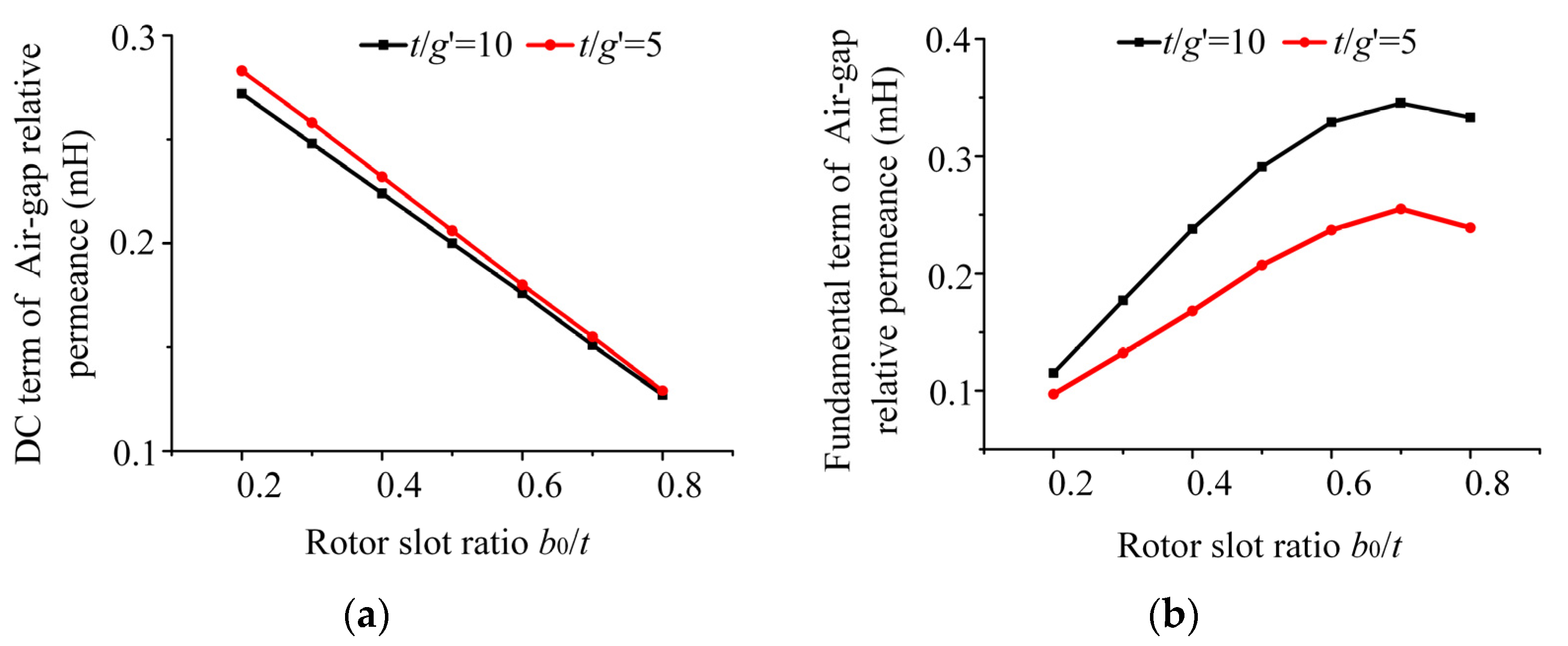
5.2. Air-Gap Relative Permeance Analysis
5.3. Working Performance Analysis
5.3.1. No-Load Characteristic
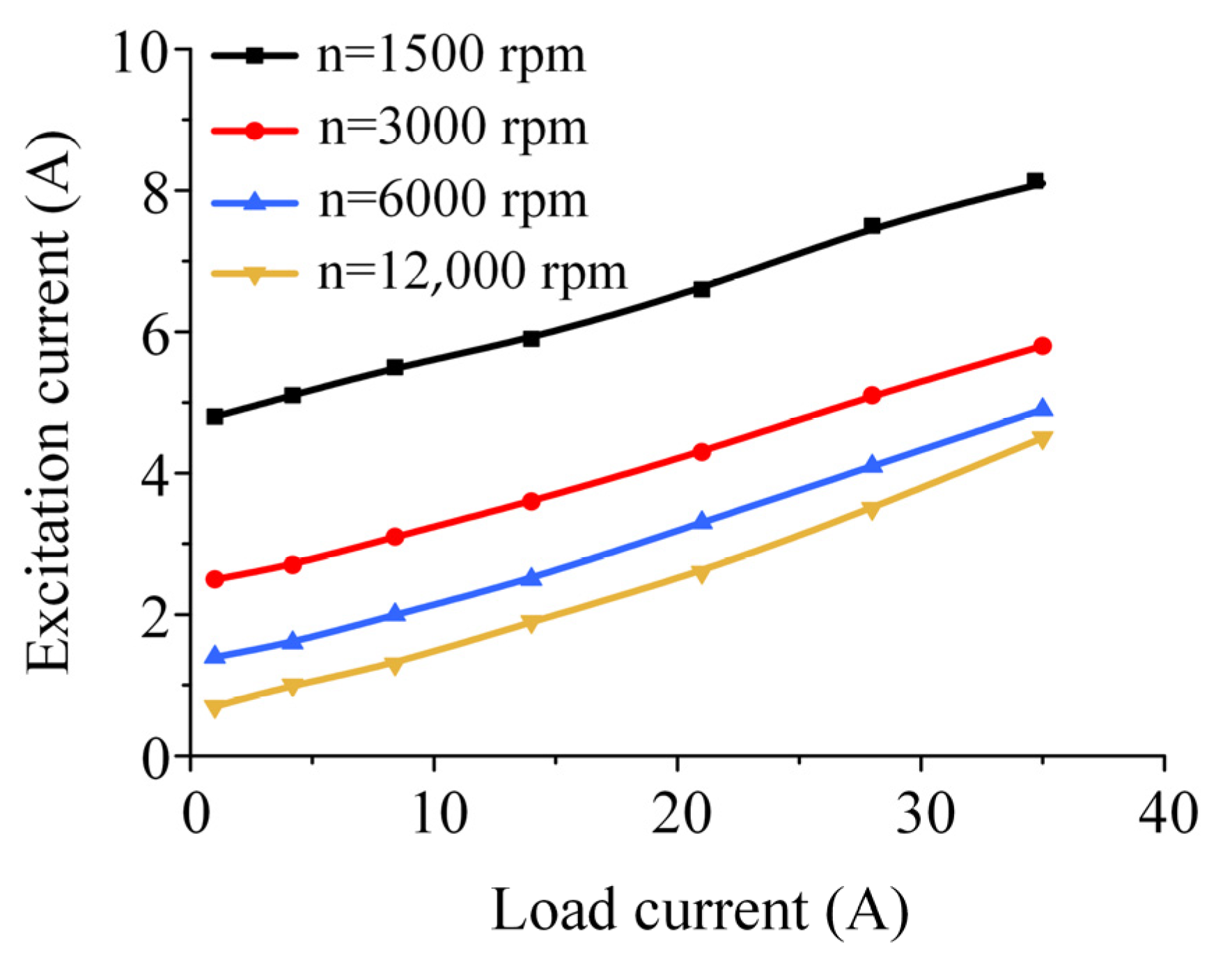
5.3.2. Adjustment Characteristic
6. Conclusions
- The hybrid and parallel excitation approach of PMs and DC excitation windings, which is suitable for wide and high-speed range operating conditions, can achieve flux regulation, reduce excitation loss, and optimize efficiency.
- The proposed topology is compact and reliable. The structure of the doubly salient poles is simple, and the separation of excitation windings and armature windings is more beneficial for insulation.
- The most suitable generation mode, namely, the DSG2 mode, was determined to ensure a stable voltage output performance for the HEDSGSW.
- The EMF to air-gap relative permeance method is efficient and accurate for deriving the no-load back EMF expression. This paper provides a theoretical basis for analyzing the operating performance, the initial design, and the optimization of such generators.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Williams, C. Comparison and review of electric machines for integrated starter generator applications. In Proceedings of the IEEE IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; pp. 386–396. [Google Scholar]
- Hu, M. Research on Power System Design and Energy Efficiency Optimization of an Extended-Range Electric Vehicle. Master’s Thesis, Peking University, Beijing, China, 2011. [Google Scholar]
- Amara, Y.; Vido, L.; Gabsi, M.; Hoang, E.; Ahmed, A.H.B.; Lecrivain, M. Hybrid Excitation Synchronous Machines: Energy-Efficient Solution for Vehicles Propulsion. IEEE Trans. Veh. Tech. 2009, 58, 2137–2149. [Google Scholar] [CrossRef]
- Kou, B.; Zhao, X.; Wang, M. Overview of negative-saliency permanent magnet synchronous motors and its control technology. Proc. CSEE 2019, 39, 2414–2425. [Google Scholar]
- Rauch, S.E.; Johnson, L.J. Design Principles of Flux-Switch Alternators [includes discussion]. IEEE Trans. Ind. Appl. 1955, 74, 1261–1268. [Google Scholar] [CrossRef]
- Liao, Y.; Liang, F.; Lipo, T.A. A novel permanent magnet motor with double salient structure. IEEE Trans. Ind. Appl. 1995, 31, 1069–1074. [Google Scholar] [CrossRef]
- Luo, X.; Qin, D.; Lipo, T.A. A novel two-phase doubly salient permanent magnet motor. In Proceedings of the IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996. [Google Scholar]
- Sarlioglu, B.; Zhao, Y.; Lipo, T.A. A novel doubly salient single-phase permanent magnet generator. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Denver, CO, USA, 2–6 October 1994. [Google Scholar]
- Zha, S. Operation analysis of four-phase 8/6-pole doubly salient permanent magnet generator. Micro Spec. Mot. 2005, 3, 15–23. [Google Scholar]
- Fan, Y.; Chau, K.T.; Niu, S. Development of a New Brushless Doubly Fed Doubly Salient Machine for Wind Power Generation. IEEE Trans. Magn. 2006, 42, 3455–3457. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Liang, F.; Lipo, T.A. Transient model of a doubly excited reluctance motor. IEEE Trans. Energy Convers. 1991, 6, 126–133. [Google Scholar] [CrossRef]
- Liang, F.; Xu, L.; Lipo, T.A. D-q analysis of a variable speed doubly AC excited reluctance motor. Electr. Mach. Power Syst. 1991, 19, 125–138. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, H.; Yan, Y. A doubly salient starter/generator with the two-section twisted-rotor structure for potential future aerospace application. IEEE Trans. Ind. Electron. 2011, 59, 3588–3595. [Google Scholar] [CrossRef]
- Wang, L.; Meng, X.; Cao, X. Nonlinear Model of Electrically Excited Doubly Salient Generator. Proc. CSEE 2005, 25, 137–143. [Google Scholar]
- Zhang, G.; Hua, W.; Cheng, M. Design and comparison of two six-phase hybrid-excited flux switching machines for EV/HEV applications. IEEE Trans. Ind. Electron. 2016, 63, 481–493. [Google Scholar] [CrossRef]
- Shakal, A.; Liao, Y.; Lipo, T.A. A permanent magnet AC machine structure with true field weakening capability. In Proceedings of the IEEE International Symposium on Industrial Electronics Conference, Budapest, Hungary, 1–3 June 1993. [Google Scholar]
- Lipo, T.A.; Liao, Y.; Liang, F. Field Weakening for a Doubly Salient Motor with Stator Permanent Magnets. U.S. Patent 5,455,473, 3 October 1995. [Google Scholar]
- Li, Y.; Lipo, T.A. A doubly salient permanent magnet motor capable of field weakening. In Proceedings of the IEEE Power Electronics Specialist Conference, Atlanta, GA, USA, 18–22 June 1995. [Google Scholar]
- Zhu, X.; Cheng, M. A novel stator hybrid excited doubly salient permanent magnet brushless machine for electric vehicles. In Proceedings of the 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005. [Google Scholar]
- Li, Y.; Jiang, J.; Zou, T. Research on a new stator double-fed biconvex permanent magnet motor. Proc. CSEE 2005, 25, 119–123. [Google Scholar]
- Chen, J.; Zhu, Z.; Iwasaki, S.; Deodhar, R. A novel E-core flux-switching PM brushless AC machine. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010. [Google Scholar]
- Hua, W.; Zhang, G.; Cheng, M. Flux-Regulation Theories and Principles of Hybrid-Excited Flux-Switching Machines. IEEE Trans. Ind. Electron. 2015, 62, 5359–5369. [Google Scholar] [CrossRef]
- Kou, B.; Xie, D.; Cheng, S.; Li, M. Torque Characteristic of Magnetic Flux Switching Hybrid Excitation Reluctance Motor. Proc. CSEE 2007, 15, 1–7. [Google Scholar]
- Kou, B.; Li, L.; Cheng, S.; Li, X. Hybrid Excitation Switched Reluctance Motor. CN Patent 2,681,432, 23 February 2005. [Google Scholar]
- Kou, B.; Xie, D.; Li, L.; Cheng, S. Hybrid Excitation Switched Reluctance Motor with A Short Circuit. CN Patent 2,847,653, 13 December 2006. [Google Scholar]
- Afinowi, I.A.; Zhu, Z.; Guan, Y.; Mipo, J.C.; Farah, P. Hybrid-excited doubly salient synchronous machine with permanent magnets between adjacent salient stator poles. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef]
- Qin, H. Research on Basic Performance of Hybrid Excitation Doubly Salient Motor. Ph.D. Dissertation, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2006. [Google Scholar]
- Yu, L.; Zhang, Z.; Bian, Z.; Gerada, D.; Gerada, C. Dual-Pulse Mode Control of a High-Speed Doubly Salient Electromagnetic Machine for Loss Reduction and Speed Range Extension. IEEE Trans. Ind. Electron. 2020, 67, 4391–4401. [Google Scholar] [CrossRef]
- Gao, Y.; Li, D.; Qu, R.; Fang, H.; Ding, H.; Jing, L. Analysis of a novel consequent-pole flux switching permanent magnet machine with flux bridges in the stator core. IEEE Trans. Energy Convers. 2018, 33, 2153–2162. [Google Scholar] [CrossRef]
- Zhu, J.; Wu, L.; Zheng, W.; Zhou, Q.; Li, T. Magnetic Circuit Modeling of Dual-Armature Flux-Switching Permanent Magnet Machine. IEEE Trans. Magn. 2021, 57, 1–13. [Google Scholar] [CrossRef]
- Zarko, D.; Ban, D.; Lipo, T.A. Analytical calculation of magnetic field distribution in the slotted air gap of a surface permanent-magnet motor using complex relative air-gap permeance. IEEE Trans. Magn. 2006, 42, 1828–1837. [Google Scholar] [CrossRef]
- Zheng, M.; Zhu, Z.; Cai, S.; Li, H.Y.; Liu, Y. Influence of Stator and Rotor Pole Number Combinations on the Electromagnetic Performance of Stator Slot-Opening PM Hybrid-Excited Machine. IEEE Trans. Magn. 2019, 55, 1–10. [Google Scholar] [CrossRef]
- Babe, A.S.; Lanfranchi, V.; Vivier, S.; Missoum, R.; Zaim, M.E. Analytical Modelling of Doubly Salient Electric Machines using Conformal Mapping Method. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value | Symbol | Quantity | Value |
|---|---|---|---|---|---|
| Zs | Slots of stator | 12 | lef | Stack length of the stator yoke | 5 mm |
| Zr | Slots of rotor | 10 | hf | Depth of excitation slots | 14 mm |
| Ns | Turns of armature winding | 28 | hs | Depth of armature slots | 9.5 mm |
| Nf | Turns of excitation winding | 80 | DS | Diameter of excitation winding | 1.38 mm |
| g | Air-gap length | 1 mm | Df | Diameter of armature winding | 1.95 mm |
| Dsi | Inner diameter of the stator | 93 mm | hm | PM thickness | 3 mm |
| Dso | Outer diameter of the stator | 160 mm | wm | PM width | 5 mm |
| ww | Width of stator teeth | 10 mm | lm | PM axial length | 140 mm |
| Dri | Inner diameter of the rotor | 60 mm | Dro | Outer diameter of the rotor | 92 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Kou, B.; Zhang, L.; Zhao, Y.; Xu, J. A Novel Hybrid Excitation Doubly Salient Generator with Separated Windings by PM Inserted in Stator Slot for HEVs. Energies 2022, 15, 7968. https://doi.org/10.3390/en15217968
Wang M, Kou B, Zhang L, Zhao Y, Xu J. A Novel Hybrid Excitation Doubly Salient Generator with Separated Windings by PM Inserted in Stator Slot for HEVs. Energies. 2022; 15(21):7968. https://doi.org/10.3390/en15217968
Chicago/Turabian StyleWang, Mengyao, Baoquan Kou, Lu Zhang, Yuansheng Zhao, and Jian Xu. 2022. "A Novel Hybrid Excitation Doubly Salient Generator with Separated Windings by PM Inserted in Stator Slot for HEVs" Energies 15, no. 21: 7968. https://doi.org/10.3390/en15217968