
Research on Magnetic Field and Force Characteristics of a Novel Four-Quadrant Lorentz Force Motor

 ,
,
Abstract
:1. Introduction
2. Basic Structure and Operating Principle
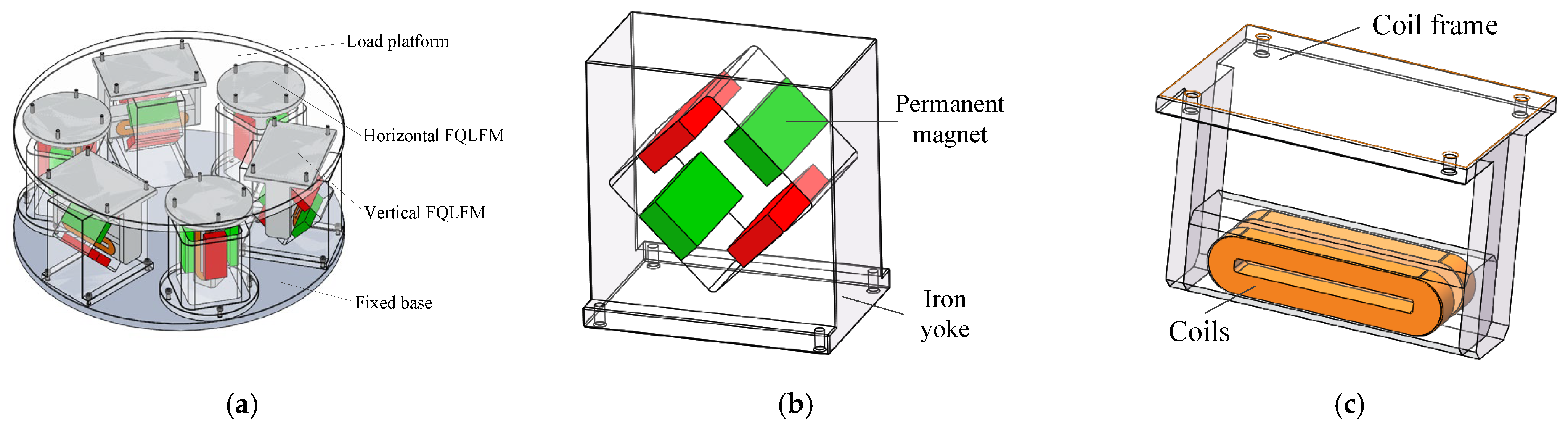
2.1. Basic Structure of FQLFM
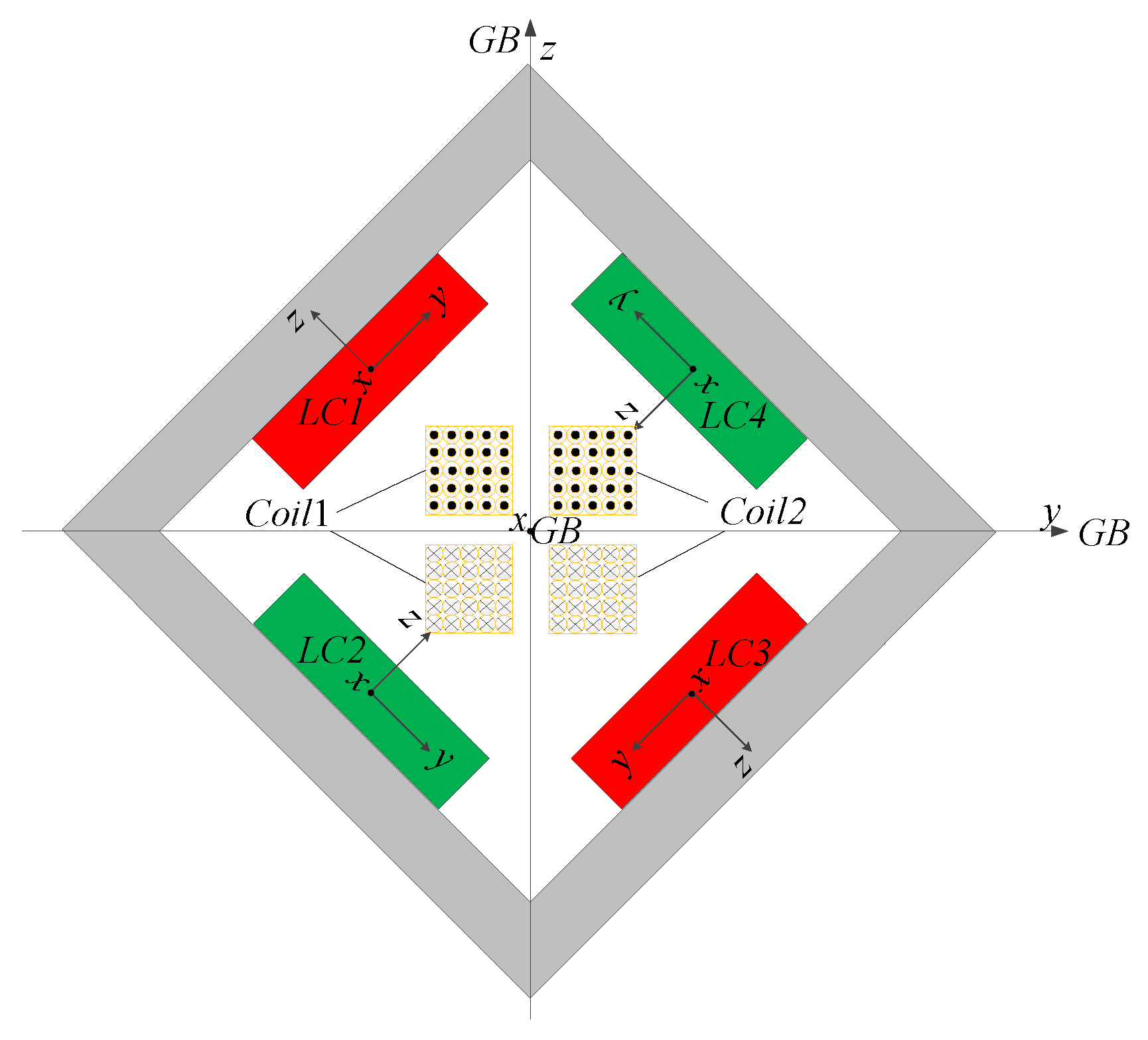
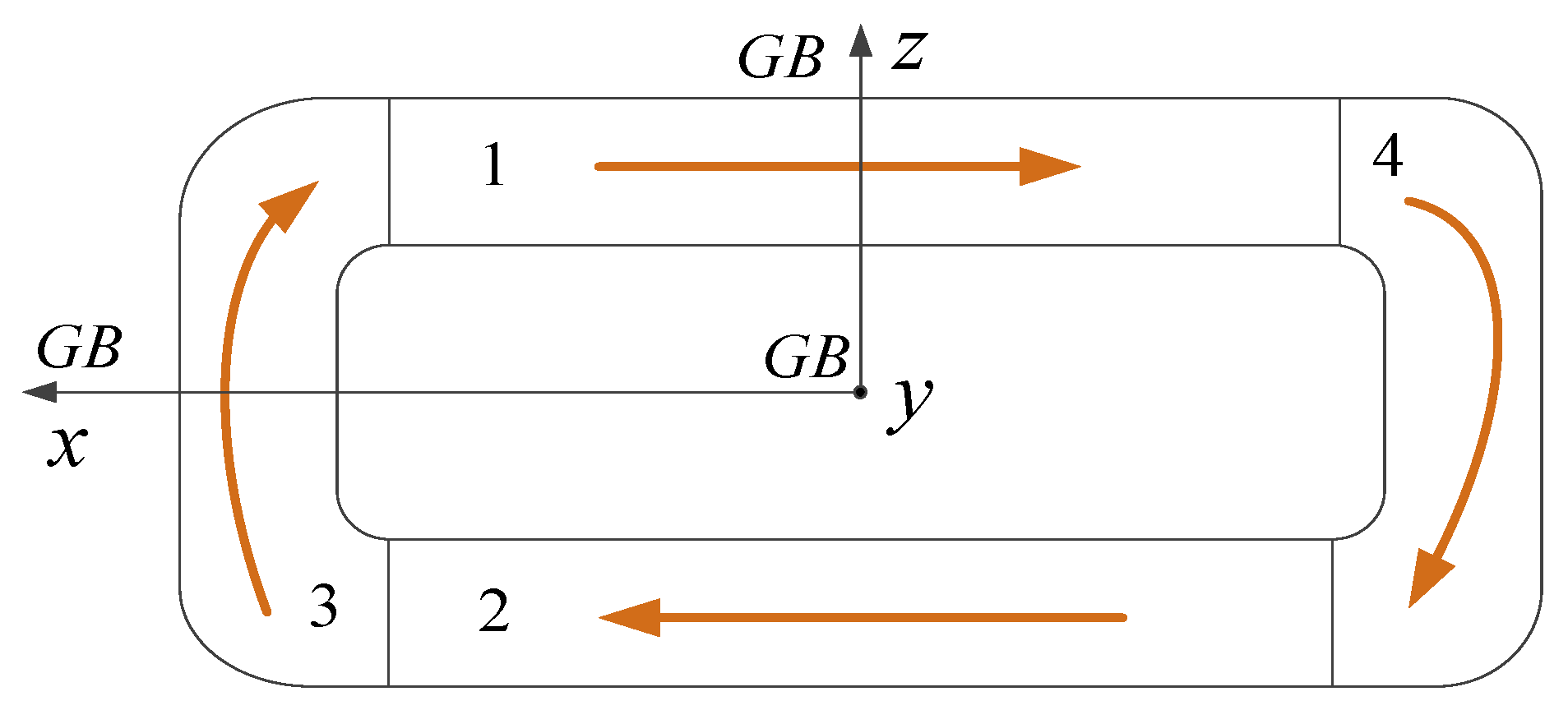
2.2. Operating Principle of FQLFM
3. Mathematical Model
3.1. Establishment of Coordinate System
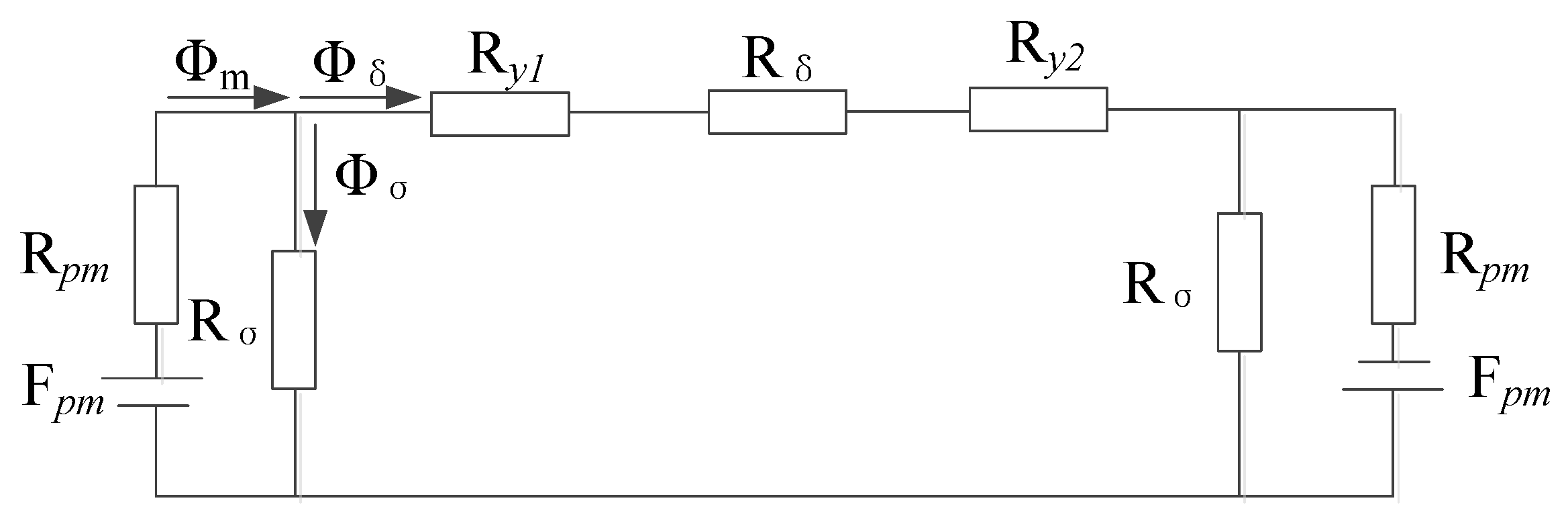
3.2. Magnetic Field of FQLFM
3.3. Electromagnetic Force
4. Finite Element Analysis
4.1. 3D Models of Two Kinds of LFM
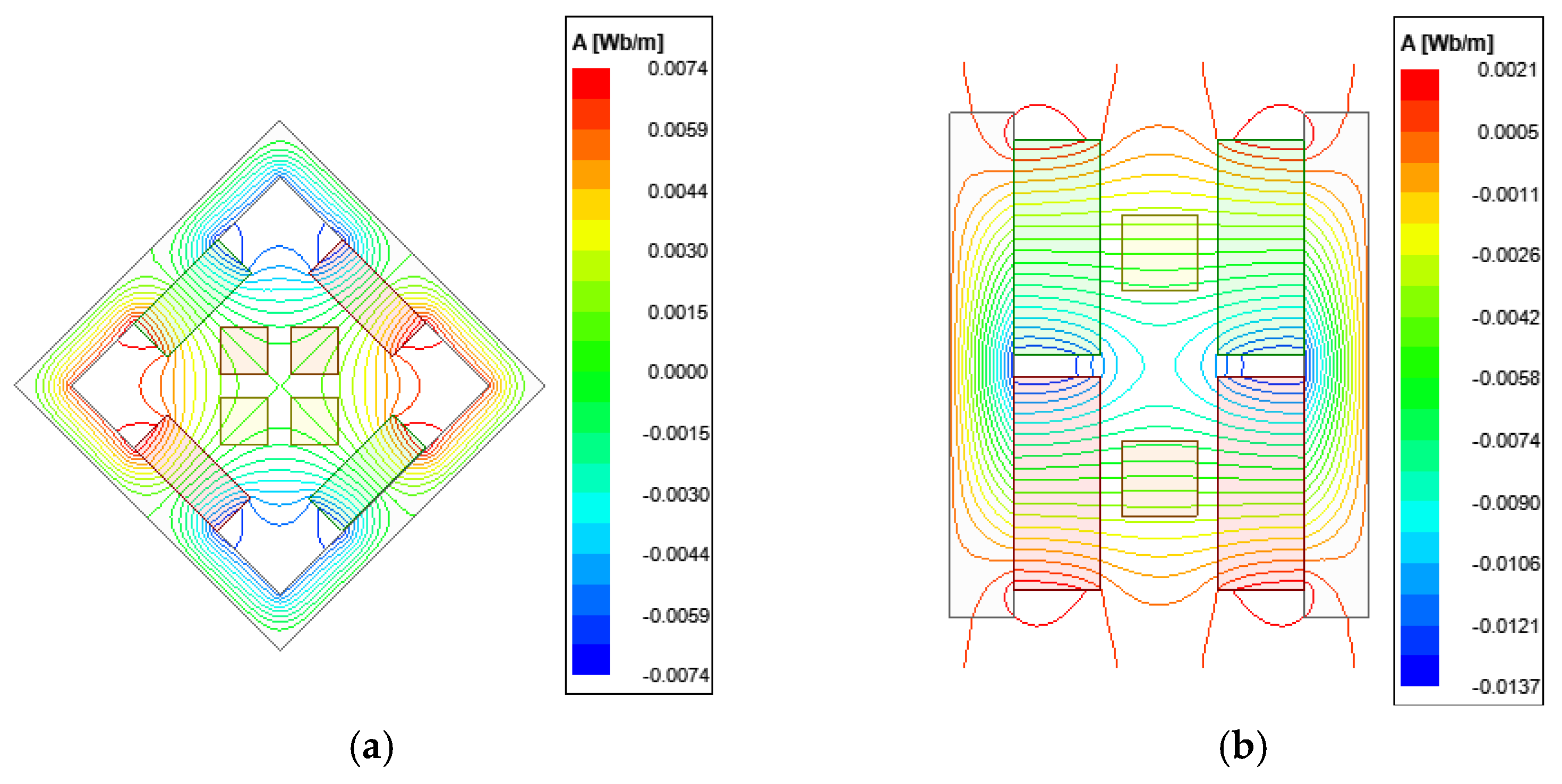
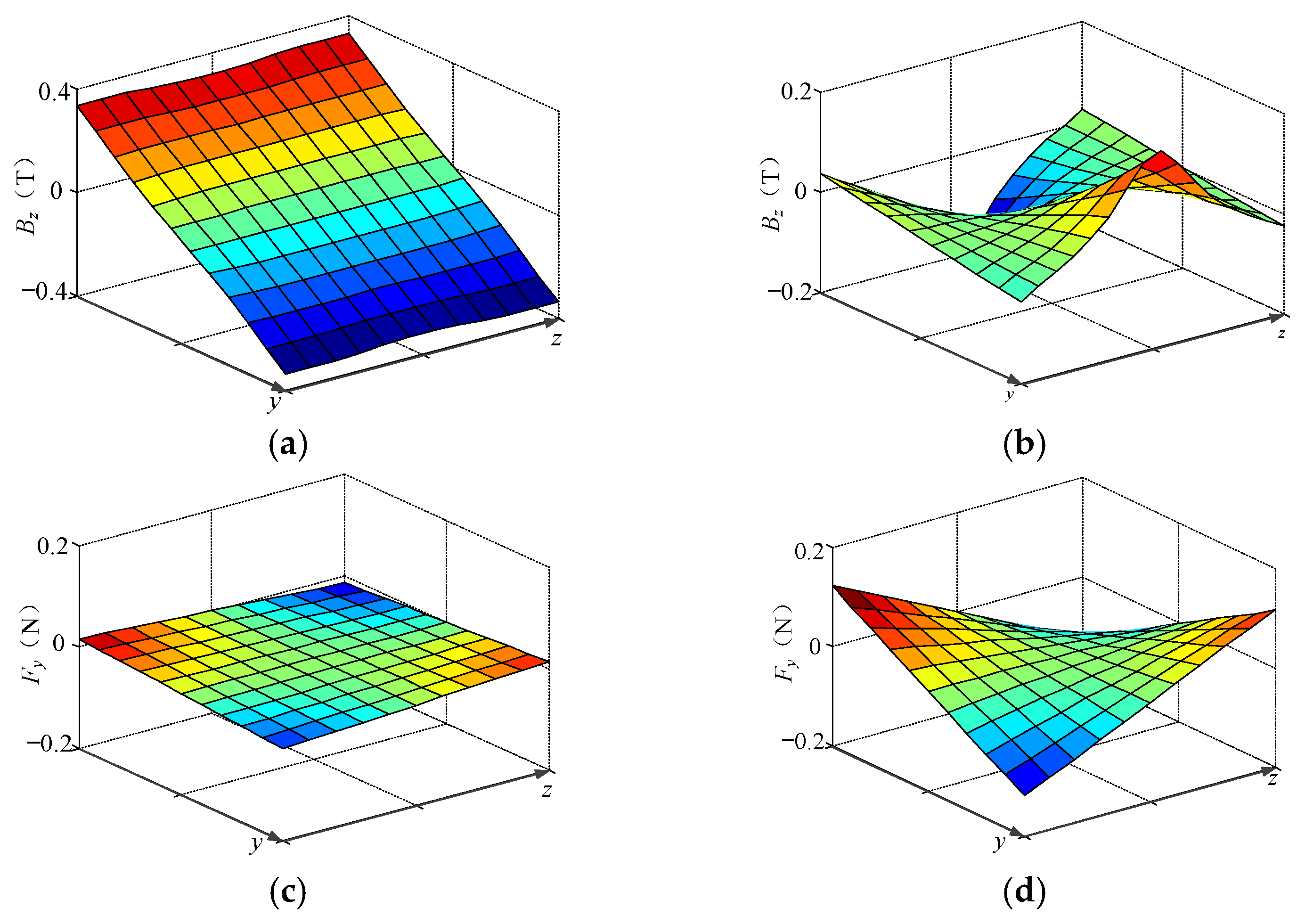
4.2. Magnetic Field and Force Compared between FQLFM and LFMOTBS
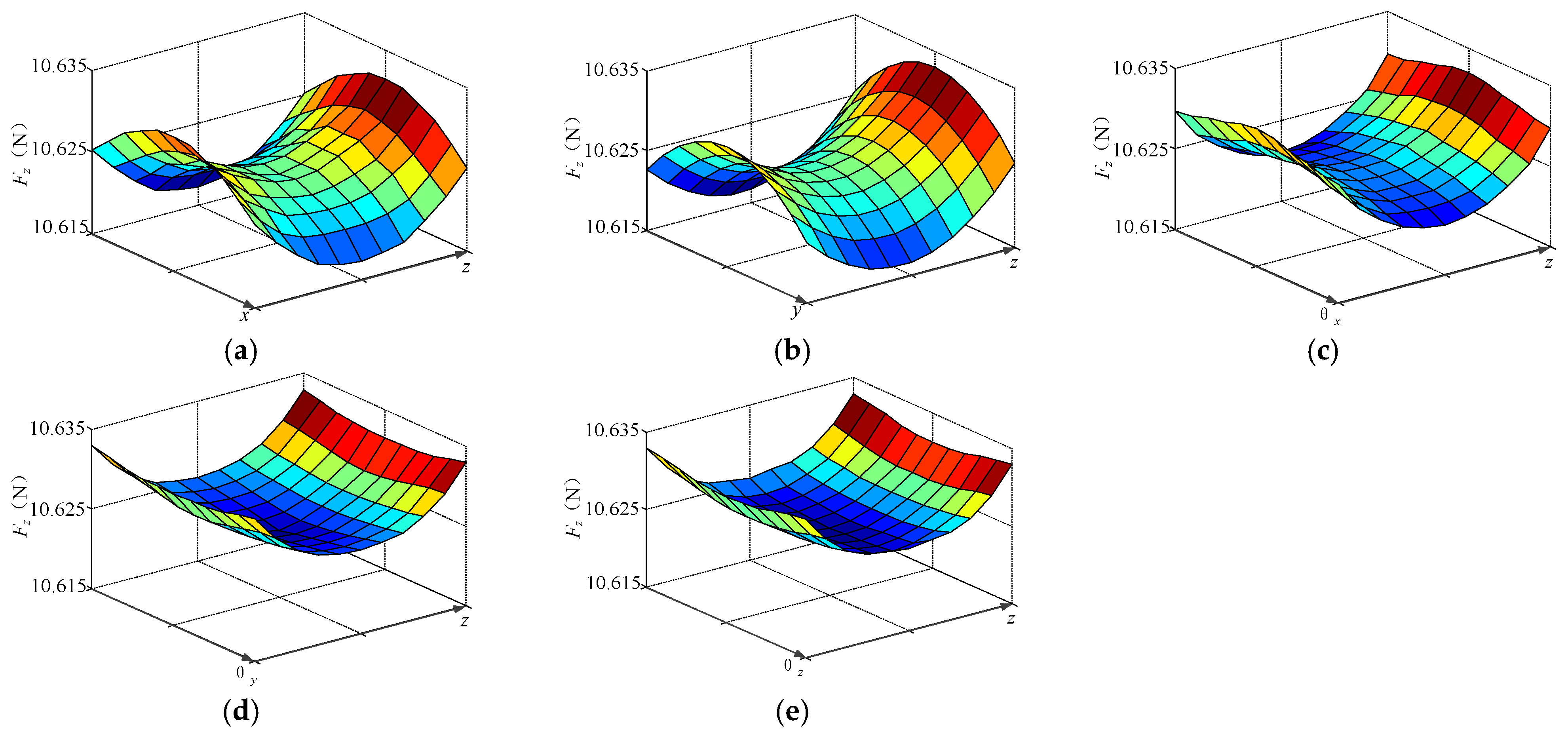
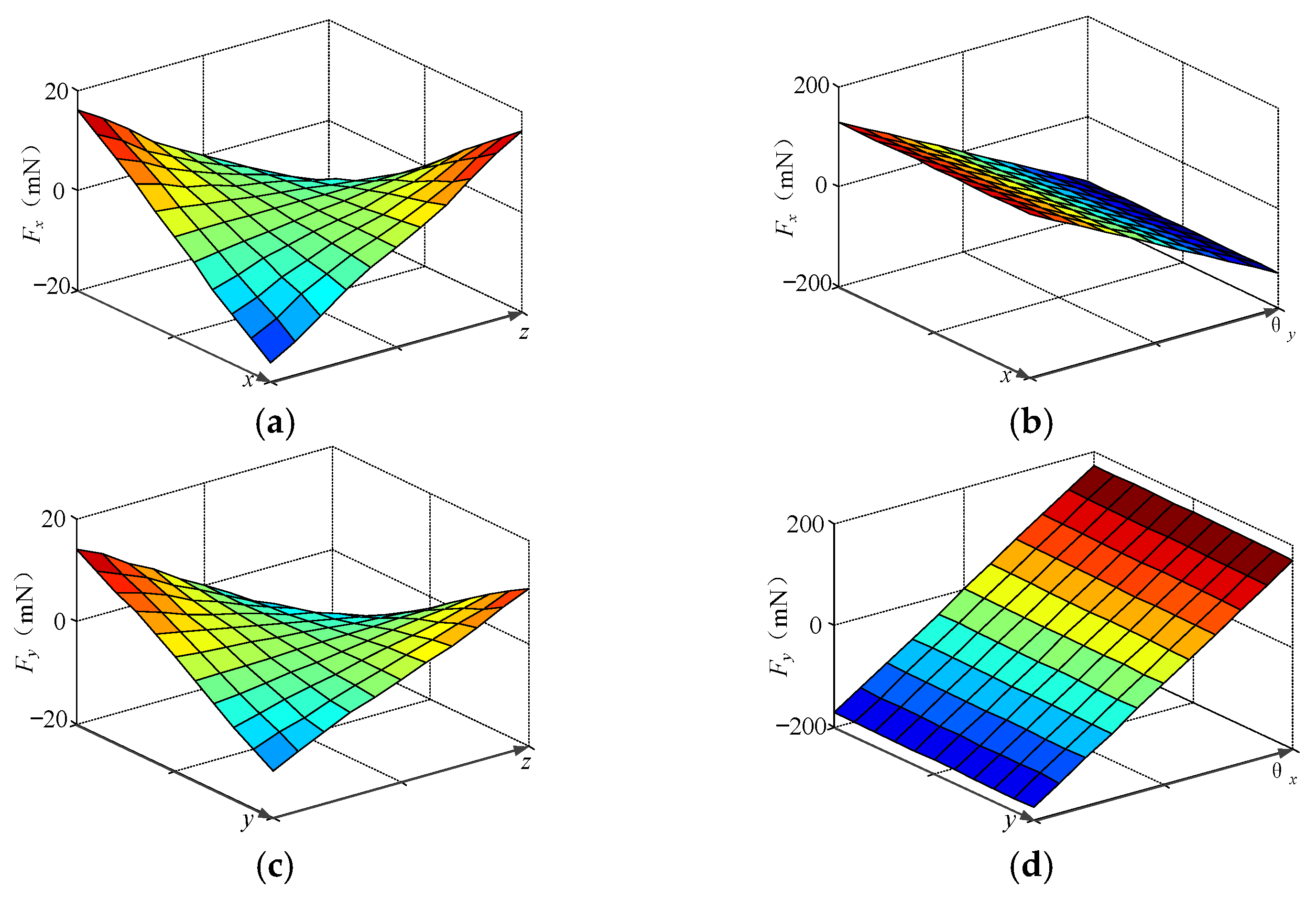
4.3. Force Characteristics of FQLFM
4.4. Verification by FEA on PM Mirror-Image Method
5. Experimental Verification
5.1. Experimental Setup
5.2. Force Characteristic Comparison
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maurya, S.K.; Galvan, H.R.; Gautam, G.; Xu, X. Recent progress in transparent conductive materials for photovoltaics. Energies 2022, 15, 8698. [Google Scholar] [CrossRef]
- Zhou, Y.; Kou, B.; Zhang, H.; Zhang, L.; Wang, L. Design, Analysis and Test of a Hyperbolic Magnetic Field Voice Coil Actuator for Magnetic Levitation Fine Positioning Stage. Energies 2019, 12, 1830. [Google Scholar] [CrossRef] [Green Version]
- Tsuda, M.; Tamashiro, K.; Sasaki, S.; Yagai, T.; Hamajima, T.; Yamada, T.; Yasui, K. Vibration transmission characteristics against vertical vibration in magnetic levitation type HTS seismic/vibration isolation device. IEEE Trans. Appl. Supercond. 2009, 19, 2249–2252. [Google Scholar] [CrossRef]
- Ainslie, M.D.; Weinstein, R.; Sawh, R.-P. An Explanation for Observed Flux Creep in Opposite Direction to Lorentz Force in Partially Magnetized Bulk Superconductors. IEEE Trans. Appl. Supercond. 2019, 29, 1004–1007. [Google Scholar] [CrossRef] [Green Version]
- Chai, J.; Gui, X. Overview of structure optimization and application of voice coil motor. Trans. China Electrotech. Soc. 2021, 36, 1114–1125. [Google Scholar]
- Li, Z.; Wu, K.; Guo, M.; Chen, Y.; Wen, Y.; Wang, L. Constrained model predictive control for six-DOF vibration isolator of the absolute marine gravimeter. In I2MTC; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Wei, Y.; Nguyen, V.H.; Kim, W.-J. A 3-D printed Halbach-cylinder motor with self-position sensing for precision motions. IEEE Trans. Mechatron. 2021, 27, 1489–1497. [Google Scholar] [CrossRef]
- Shen, B.; Fu, L.; Geng, J.; Zhang, H.; Zhang, X.; Zhong, Z.; Huang, Z.; Coombs, T.A. Design of a superconducting magnet for Lorentz force electrical impedance tomography. IEEE Trans. Appl. Supercond. 2016, 26, 205–210. [Google Scholar] [CrossRef]
- Meng, X.; Wang, C.; Song, L.; Nie, Q.; Wang, Z.; Jiang, H. Designing and controlling voice coil motor based on the mars gravity simulation. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems(ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar]
- Liu, C.-S.; Lin, P.-D.; Lin, P.-H.; Ke, S.-S.; Chang, Y.-H.; Horng, J.-B. Design and characterization of miniature auto-focusing voice coil motor actuator for cell phone camera applications. IEEE Trans. Magn. 2009, 45, 155–159. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Valiente-Blanco, I.; Diez-Jimenez, E.; Sanchez-Garcia-Casarrubios, J. Superconducting non-Contact device for precision positioning in cryogenic environments. IEEE/ASME Trans. Mechatron. 2014, 19, 598–605. [Google Scholar] [CrossRef]
- Chen, Y.-D.; Fuh, C.-C.; Tung, P.-C. Application of voice coil motors in active dynamic vibration absorbers. IEEE Trans. Magn. 2005, 41, 1149–1154. [Google Scholar] [CrossRef]
- Rovers, J.M.M.; Jansen, J.W.; Compter, J.C.; Lomonova, E.A. Analysis method of the dynamic force and torque distribution in the magnet array of a commutated magnetically levitated planar actuator. IEEE Trans. Ind. Electron. 2012, 59, 2157–2166. [Google Scholar] [CrossRef]
- Zhang, H.; Kou, B.; Jin, Y.; Zhang, H. Modeling and analysis of a new cylindrical magnetic levitation gravity compensator with low stiffness for the 6-DOF fine stage. IEEE Trans. Ind. Electron. 2015, 62, 3629–3639. [Google Scholar] [CrossRef]
- Xu, Q. Design and development of a compact flexure-based XY precision positioning system with centimeter range. IEEE Trans. Ind. Electron. 2014, 61, 893–903. [Google Scholar] [CrossRef]
- Zhang, H.; Kou, B.; Zhang, H.; Jin, Y. A three-degree-of-freedom short-stroke Lorentz-force-driven planar motor using a Halbach permanent-magnet array with unequal thickness. IEEE Trans. Ind. Electron. 2015, 62, 3640–3650. [Google Scholar] [CrossRef]
- Jansen, J.W.; van Lierop, C.M.M.; Lomonova, E.A.; Vandenput, A.J.A. Modeling of magnetically levitated planar actuators with moving magnets. IEEE Trans. Magn. 2007, 43, 15–25. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Kou, B.; Zhang, H.; Luo, J.; Gan, L. Force characteristic analysis of a linear magnetic bearing with rhombus magnet array for magnetic levitation positioning system. IEEE Trans. Magn. 2017, 53, 407–414. [Google Scholar] [CrossRef]
- Zhu, H.; Teo, T.J.; Pang, C.K. Design and modeling of a six-degree-of-freedom magnetically levitated positioner using square coils and 2D Halbach arrays. IEEE Trans. Ind. Electron. 2017, 64, 440–450. [Google Scholar] [CrossRef]
- Ravaud, R.; Lemarquand, G.; Lemarquand, V.; Depollier, C. Permanent magnet couplings: Field and torque three-dimensional expressions based on the Coulombian model. IEEE Trans. Magn. 2009, 45, 1950–1958. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Tan, Y.; Dong, R. Nonlinear modeling and decoupling control of XY micro positioning stages with piezoelectric actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 821–832. [Google Scholar] [CrossRef]
- Zhang, Z.-P.; Menq, C.-H. Six-axis magnetic levitation and motion control. IEEE Trans. Robot. 2007, 23, 15–25. [Google Scholar] [CrossRef]
- Chen, M.Y.; Lin, T.B.; Hung, S.K.; Fu, L.C. Design and experiment of a macro–micro planar maglev positioning system. IEEE Trans. Ind. Electron. 2012, 59, 4128–4139. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | FQLFM | LFMOTBS | Material |
|---|---|---|---|
| Width of PM | 20 mm | 20 mm | NdFeb N35 |
| Thickness of PM | 8 mm | 8 mm | |
| Length of PM | 45 mm | 45 mm | |
| Width of coils | 8 mm | 7 mm | Copper |
| Thickness of coils | 8 mm | 7 mm | |
| Length of coils | 60 mm | 60 mm | |
| Turns of coils | 64 | 50 | |
| Thickness of iron yoke | 7 mm | 7 mm | DT4 |
| Min gap length | 3 mm | 3 mm | Air |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Wang, C.; Zhong, J.; Xia, H.; Song, L.; Yang, G. Research on Magnetic Field and Force Characteristics of a Novel Four-Quadrant Lorentz Force Motor. Energies 2023, 16, 1091. https://doi.org/10.3390/en16031091
Meng X, Wang C, Zhong J, Xia H, Song L, Yang G. Research on Magnetic Field and Force Characteristics of a Novel Four-Quadrant Lorentz Force Motor. Energies. 2023; 16(3):1091. https://doi.org/10.3390/en16031091
Chicago/Turabian StyleMeng, Xiangrui, Changhong Wang, Jiapeng Zhong, Hongwei Xia, Liwei Song, and Guoqing Yang. 2023. "Research on Magnetic Field and Force Characteristics of a Novel Four-Quadrant Lorentz Force Motor" Energies 16, no. 3: 1091. https://doi.org/10.3390/en16031091
APA StyleMeng, X., Wang, C., Zhong, J., Xia, H., Song, L., & Yang, G. (2023). Research on Magnetic Field and Force Characteristics of a Novel Four-Quadrant Lorentz Force Motor. Energies, 16(3), 1091. https://doi.org/10.3390/en16031091