2.1. Mathematical Modeling of Six-Phase Squirrel Cage Induction Motor
Six-phase systems can be divided into two types; symmetrical six-phase and dual three-phase, sometimes known as asymmetrical six-phase. Each phase is 60 degrees shifted in a symmetrical six-phase system. In a six-phase system that is balanced, each phase’s magnitude is the same, and the phase shift is 60 degrees. A symmetrical six-phase system, also known as a quasi-six-phase system, can be thought of as a pair of three-phase systems with a phase shift of 30 degrees. In the study of this system, iron saturation was neglected. Mathematically, the symmetrical six-phase system supply voltages are represented as [
18]:
The six-phase squirrel cage induction motor is represented in its d–q synchronous reference frame. The general equations of the six-phase induction motor can be introduced as the following. The d-q axis reference frame is fixed in the rotor, which rotates at a speed of
. The d-q voltage equations of the six-phase induction motor are expressed as follows in the rotor reference frame [
18].
where
,
, are stator q-axis voltage components,
, , are stator d-axis voltage components,
, , are rotor q-axis and d-axis voltage components, , are stator q-axis resistances,
is the rotor resistance,
p is the operator,
is synchronous speed, and
is rotor speed.
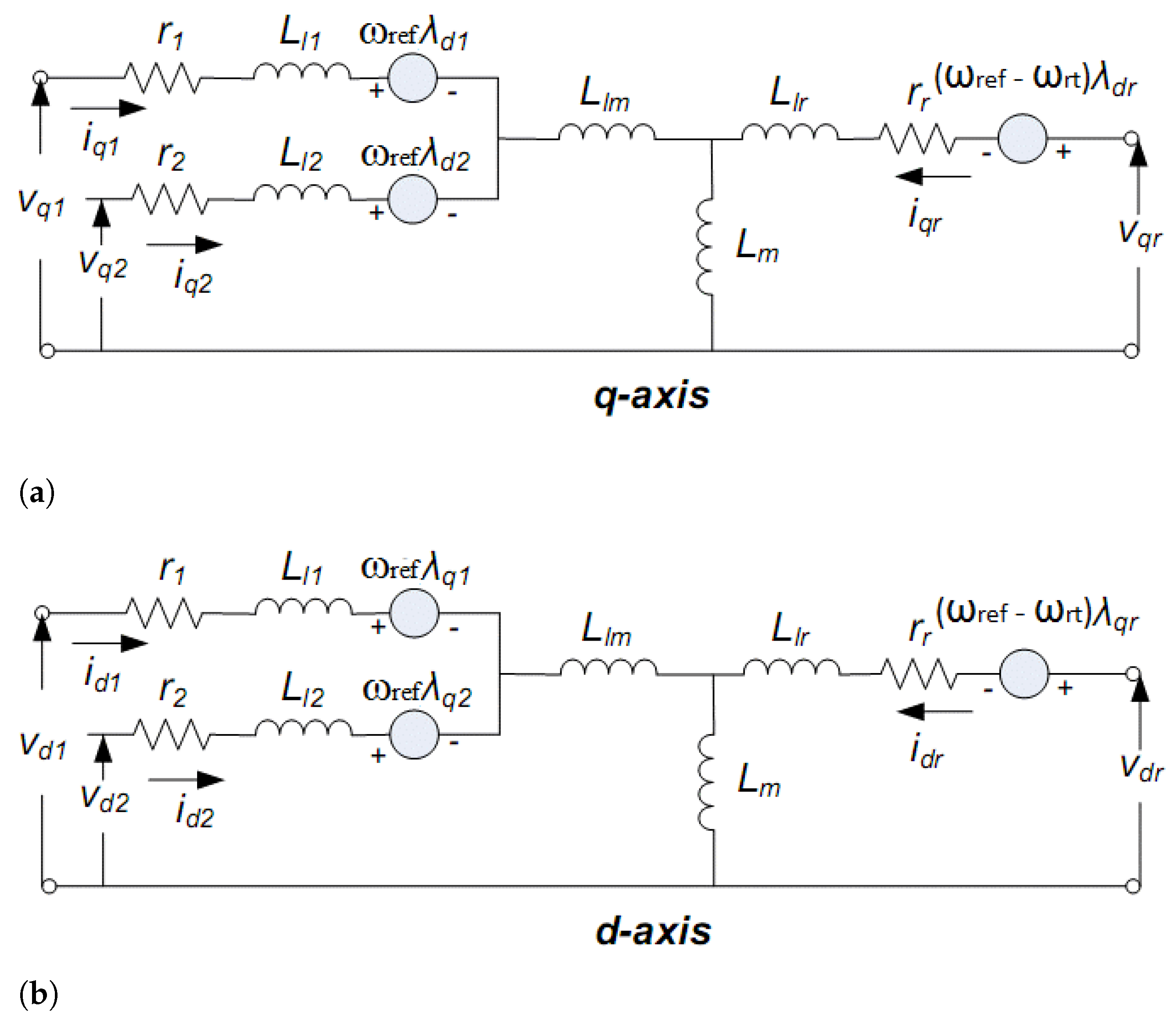
The dynamic equivalent representation was modeled and developed with the assumption of the presence of similar three-phase windings in the stator with their leakage inductance
and mutual leakage inductance
. The equivalent circuit of the six-phase squirrel cage induction motor is shown in
Figure 1.
The flux linkage equations are given below [
20].
where
, are stator q-axis flux linkage components,
, are stator d-axis flux linkage components,
, are rotor q-axis and d-axis flux-linkage components,
, are stator q-axis current components,
, are stator d-axis current components,
, are rotor q-axis and d-axis current components,
, are stator leakage inductances,
is the air gap inductance of the q-axis,
is the air gap inductance of the d-axis,
is the air gap inductance,
is stator mutual leakage inductance, and
is rotor leakage inductance.
The above equation suggests the overall equivalent circuit of the six-phase squirrel cage induction motor shown in
Figure 1.
Substituting the flux linkage expressions, Equations (
13)–(
18), into voltage Equations (
7)–(
12), to drive the dependence of the voltages on the current in the rotating reference frame, we obtain the following: First, assume the following for simplicity [
20].
Substituting Equations (
13) and (
14) into Equation (
7), then the following is obtained.
By rearranging the above equation, the following is obtained.
Then, substituting Equations (
19)–(
21) into Equation (
25), the following simplified equation is obtained.
Substituting Equations (
13) and (
14) into Equation (
8), then the following is obtained.
By rearranging the above equation, then the following is obtained.
Then, substituting Equations (
19)–(
21) into Equation (
28), the following simplified equation is obtained.
Substituting Equations (
15) and (
16) into Equation (
9), then the following is obtained.
By rearranging the above equation, the following equation is obtained.
Then, substituting Equations (
19), (
21), and (
22) into Equation (
31), the following simplified equation is obtained.
Substituting Equations (
15) and (
16) into Equation (
10), the following equation is obtained.
By rearranging the above equation, the following equation is obtained.
Then, substituting Equations (
19), (
21) and (
22) into Equation (
34), the following simplified equation is obtained.
Substituting Equations (
17) and (
18) into Equation (
11), the following equation is obtained.
By rearranging the above equation, the following equation is obtained.
Then, substituting Equations (
19) and (
23) into Equation (
37), the following simplified equation is obtained.
Substituting Equations (
17) and (
18) into Equation (
12), the following equation is obtained.
By rearranging the above equation, the following equation is obtained.
Then, substituting Equations (
19) and (
23) into Equation (
40), the following simplified equation is obtained.
Now, rewriting Equations (
26), (
29), (
32), (
35), (
38), and (
41) in the following manner:
Now, using state variable method, Equations (
42)–(
47) can be represented in a state variable form as follows [
20].
or in a simple form
= AI + B
I, where
2.1.1. Mechanical Model
The mechanical model of a six-phase induction machine is the equation of motion of the machine and the driven load, written as [
20];
The combined rotor and load viscous friction (B) is appropriately zero, so that the following equation is obtained from Equation (
48).
Now, decomposing Equation (
49) into two first-order differential equations gives the following result. Since
therefore the following result is obtained.
Substituting Equation (
50) into Equation (
51), the following equation is obtained.
= angular velocity of the rotor,
= rotor angular position,
= electrical rotor angular position,
= electrical angular velocity,
= combined rotor and load inertia coefficient, and
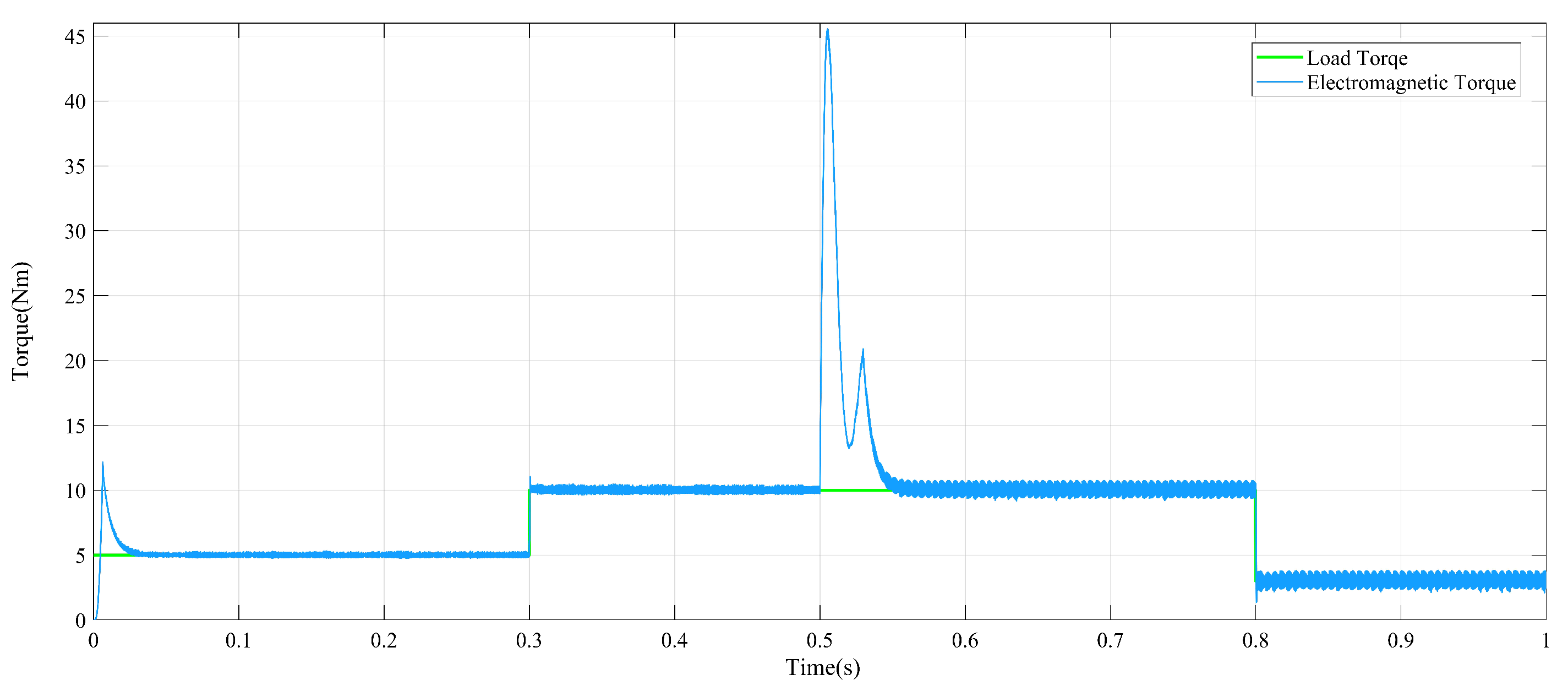
= load torque.
According to [
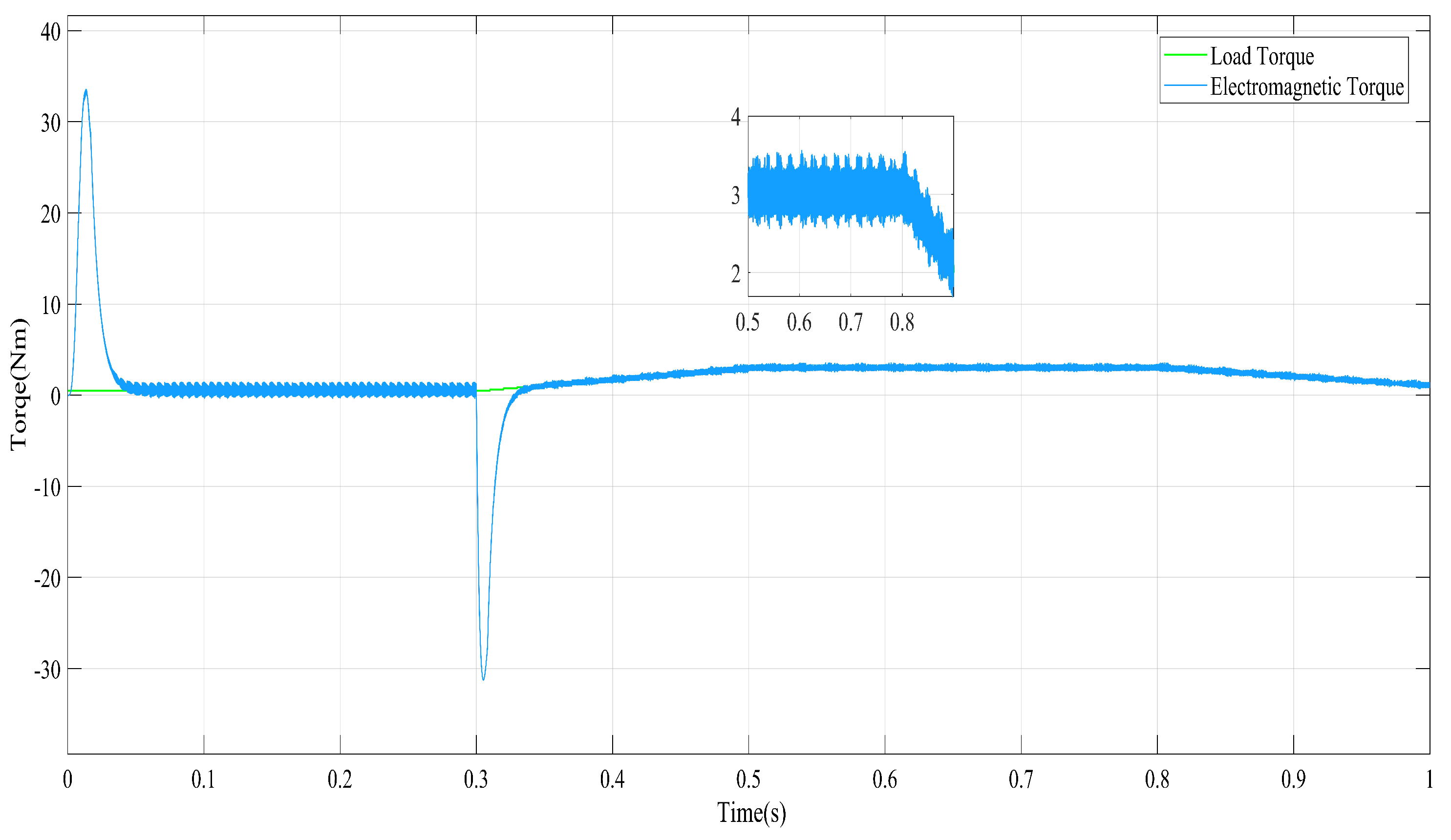
21], electromagnetic torque is calculated as:
and the drive movement is calculated as follows [
22]:
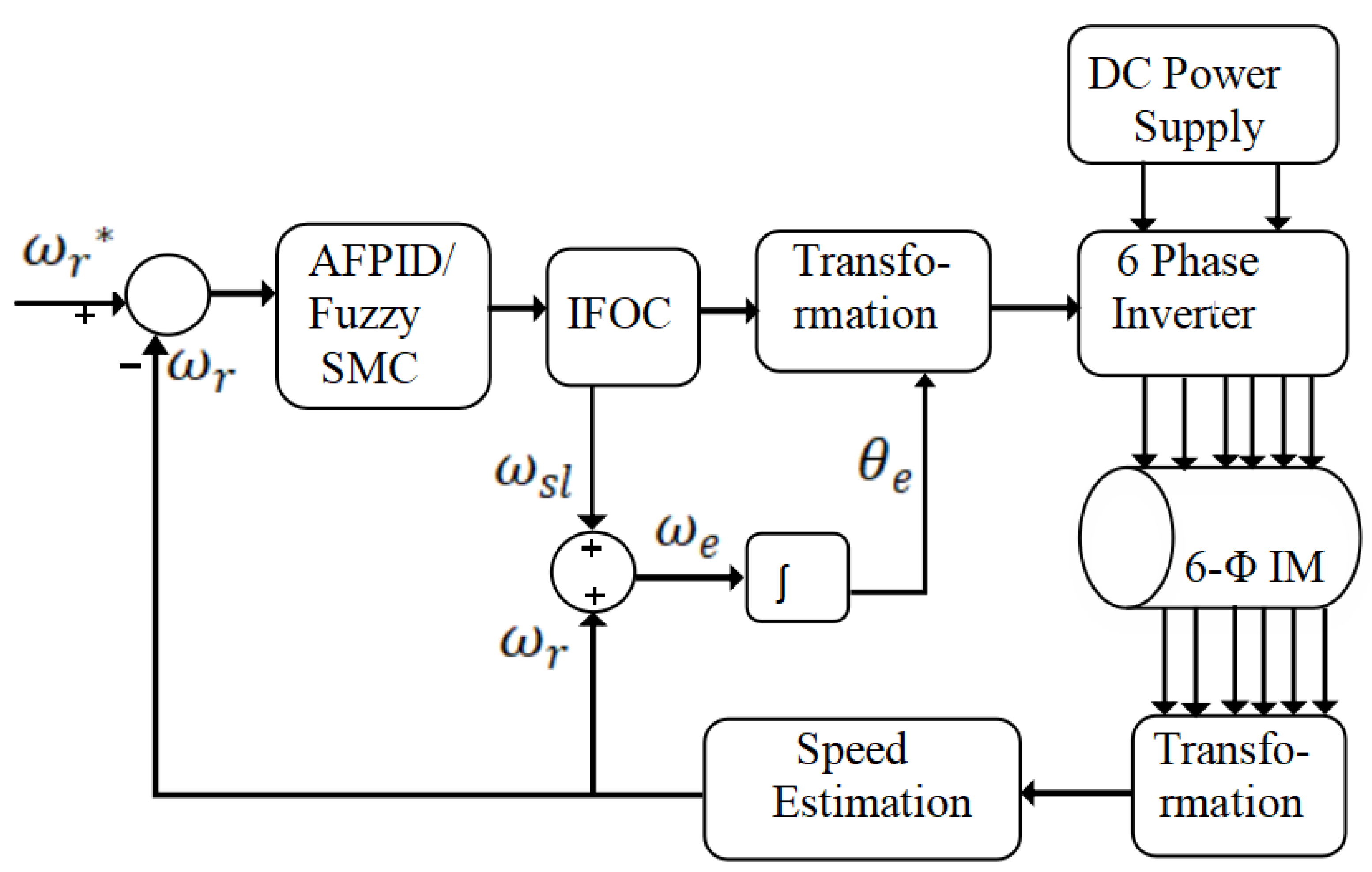
According to indirect field-oriented control (IFOC) techniques, the six-phase induction motor electromechanical torque is obtained as [
23];
2.1.2. PID Controller Design
A continuous PID and a discrete PID are the two types of integral PID speed controllers. The speed controllers employed in this simulation were both the continuous type. In general, series controllers are favored over feedback controllers because higher-order systems require a large number of state variables to detect during feedback, which necessitates a large number of transducers. As a result, series controllers are widely used. The lower-order model is connected to the controller, and the response of the closed loop is observed. The parameters of the controllers are tuned to provide a response that meets the desired specification standards. For the stability process, the parameters of controllers that were tuned are introduced into the higher-order system [
24]. For the continuous system, the PID controller transfer function is given as;
To meet the required performance specification, the determination of the constant values of the proportional gain (), integral gain (), and derivative gain () are involved in the design. Because the original system transfer function is a higher-order system, we must reduce it to a lower-order system that keeps the important properties of the original system and approximates the response almost the same for the same inputs. In order to find the reduced-order model transfer function from the original higher-order system, the following process is used.
Consider an
nth-order linear time-invariant stable system stated by the following transfer function.
where
and
.
The
kth-order reduced model of the corresponding stable system is given in the following form.
where
and
.
By criss-cross multiplication and re-arranging Equation (
61),
The following relations are obtained by equating the coefficients of the corresponding terms.
By taking any positive values either for or , the unknown parameter values are determined based on the above relation. For simplicity, let us choose either or = 1, and substituting in the above relations, the unknown parameter values are obtained. The stability of the reduced-order model system is checked by the Routh–Hurwitz criteria.
The original higher-order derived system is the fourth-order system transfer function, given as follows.
then consider the reduced second-order transfer function given by the following representations.
Now, equating
G(
s) with
M(
s) together and cross-multiplying, the following equation is obtained.
By re-arranging and equating the corresponding terms, then the following relations are obtained.
Now, for simplicity, let us choose
= 1, and solving Equation (
74), the following relation is obtained.
Solving for
results in
A standard second-order transfer function has a unity coefficient; therefore, the
value is 1.
From Equation (
79), substituting the value of
, the value of
is obtained.
By substituting the values of
,
,
, and
into Equation (
75) and solving, the following value of
is obtained.
= 13.044
Now, the reduced-order transfer function is written as follows.
Substituting the values of the parameters, the following equation is obtained.
With the open-loop transfer function
G(
s), its closed-loop transfer function of a unity feedback system is given in Equation (
86).
If the system performance requirements (e.g., output response) do not fulfill the desired specifications, a PID controller is attached to the original open-loop system, and its closed-loop transfer function is given in Equation (
87).
where
is the transfer function of the PID controller.
The initial values of the proportional gain, integral gain, and derivative gain are obtained by using a pole zero cancellation applied to the reduced-order system. Using the initial values of the proportional gain, integral gain, and derivative gain, these initial values are tuned to obtain a unit response of the compensated system that satisfies the desired specifications. After tuning of these variables, the new tuned values are obtained, which are given in
Table 1.
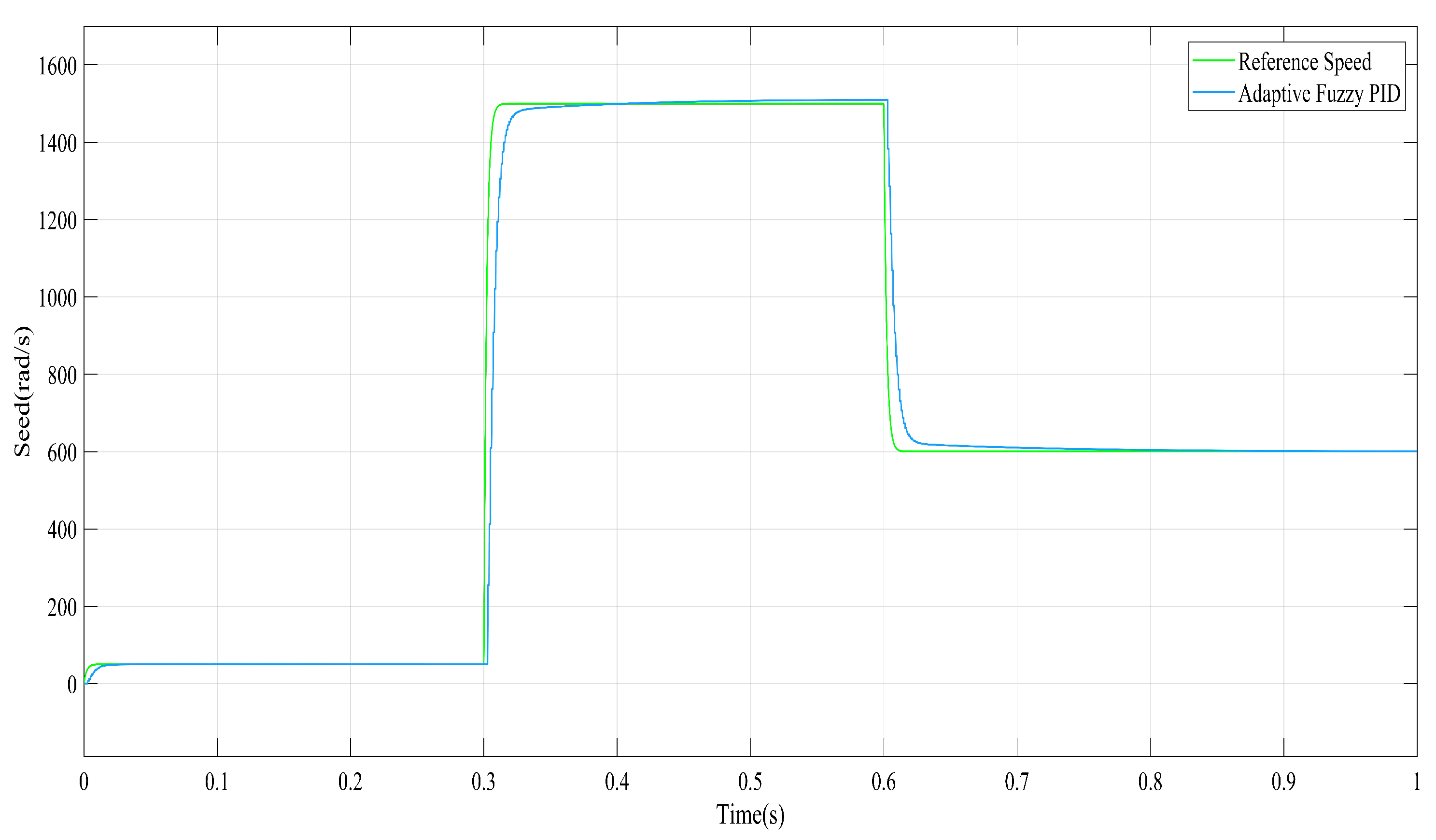
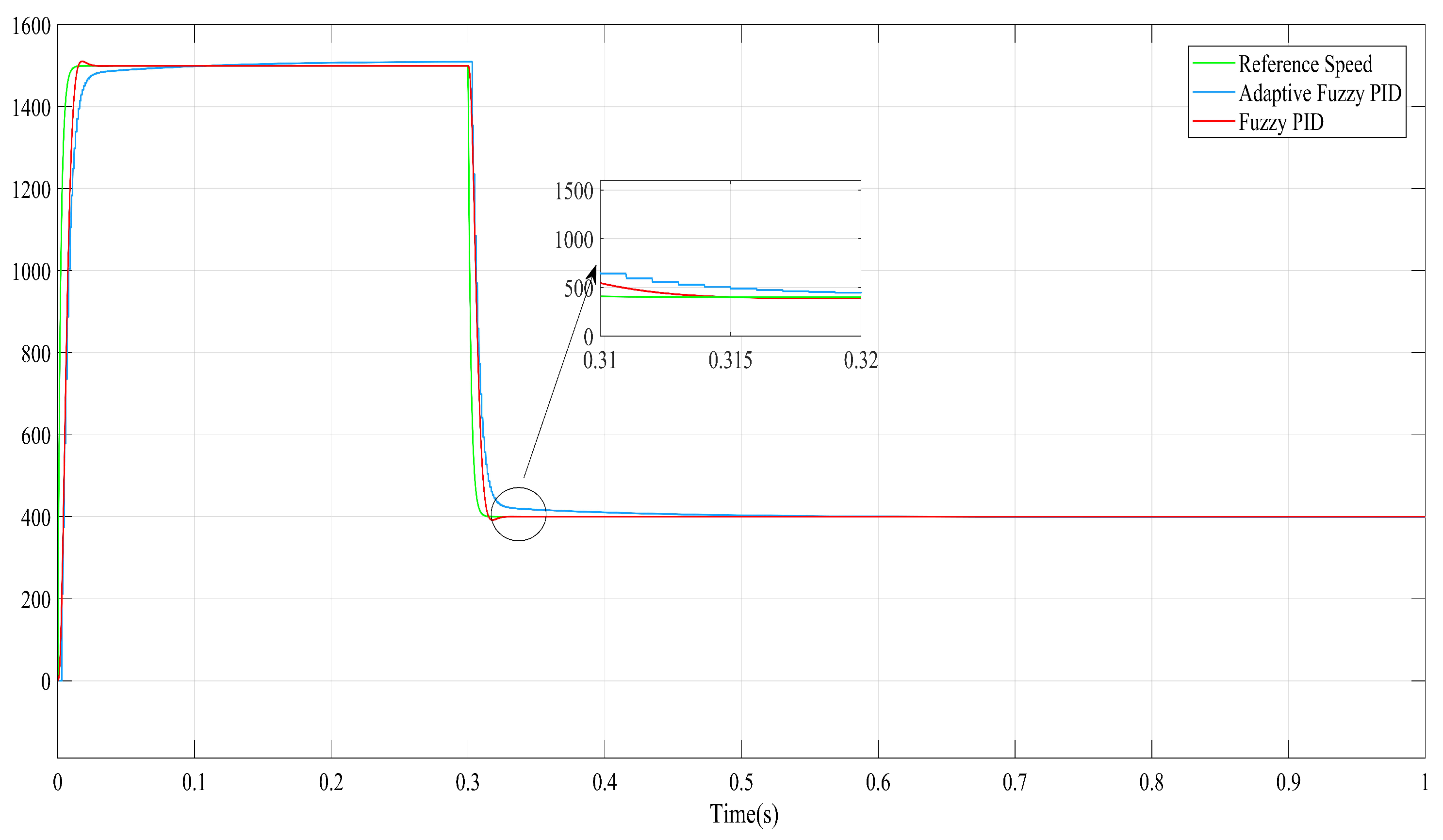
2.1.3. Adaptive Fuzzy PID Controller
The fuzzy PID is a hybrid controller that combines PID and fuzzy logic controllers [
25,
26]. This combined controller has the ability to adapt to any situation, such as the rising quantity of the input changes. The adaptive fuzzy PID controller’s main goals are to simplify the control techniques and improve the system’s static and dynamic performance, in particular for systems with complex parameters. In this scenario, the adaptive fuzzy controller is programmed to alter the PID parameters
,
, and
to achieve the desired characteristics, such as the overshoot, rising, and settling time and steady-state error [
27]. As a result, the PID controller’s proportional integral and derivative actions will be used to construct the fuzzy logic controller’s control signal [
28]. There are two inputs and one output in fuzzy logic control. These are, respectively, the error (e), error change (
), and control signal. Linguistic variables that imply the inputs and output have been classified as: NB, NM, NS, Z, PS, PM, and PB [
29]. The adaptive fuzzy PID controller is based on two inputs and three outputs. The error speed (e) and change in error speed (
) are the fuzzy control inputs, and the fuzzy outputs are
,
, and
.
The Control Rules of Fuzzy Controller
The three PID arithmetic parameters will affect the system’s stability, response speed, overshoot, and stable precision:
If is small, the large values of and are thought to ensure system stability.
If is medium, a small value of and an appropriate value of are considered to increase the performance response in the situation of reducing the overshoot.
If is large, then values of and equal zero are needed to have a good settling time, a good rise time, and a good overshoot.
There are seven fuzzy sets for
control, for a total of 49 fuzzy rules in
Table 2 and these rules in the table are transferred into numbers as in
Table 3.
Table 3 shows a
seven-valued function.
There are seven fuzzy sets for
control, for a total of 49 fuzzy rules in
Table 4 and these rules in the table are transferred into numbers as in
Table 5.
Table 5 shows a
seven-valued function.
There are seven fuzzy sets for
control, for a total of 49 fuzzy rules in
Table 6 and these rules in the table are transferred into numbers as in
Table 7.
Table 7 shows a
seven-valued function.
Membership Function of Linguistic Variable
The fuzzy rules are extracted from fundamental information and human experience about the process. The inputs are normalized in the range [−3, 3], and the outputs are the interval [−0.3, 0.3], interval [−0.06, 0.06], and interval [−0.3, 0.3]. Negative big (NB), negative medium (NM), negative small (NS), zero (Z), positive small (PS), positive medium (PM), positive big (PB) were the linguistic labels used to characterize the fuzzy sets (PM = 0.3, PM = 0.2, PS = 0.1, Z = 0, NS = −0.1, NM = −0.2, and NB = −0.3). These rules describe the control strategy by defining the input and output relationships. There are seven fuzzy sets for each control input, for a total of 49 fuzzy rules.
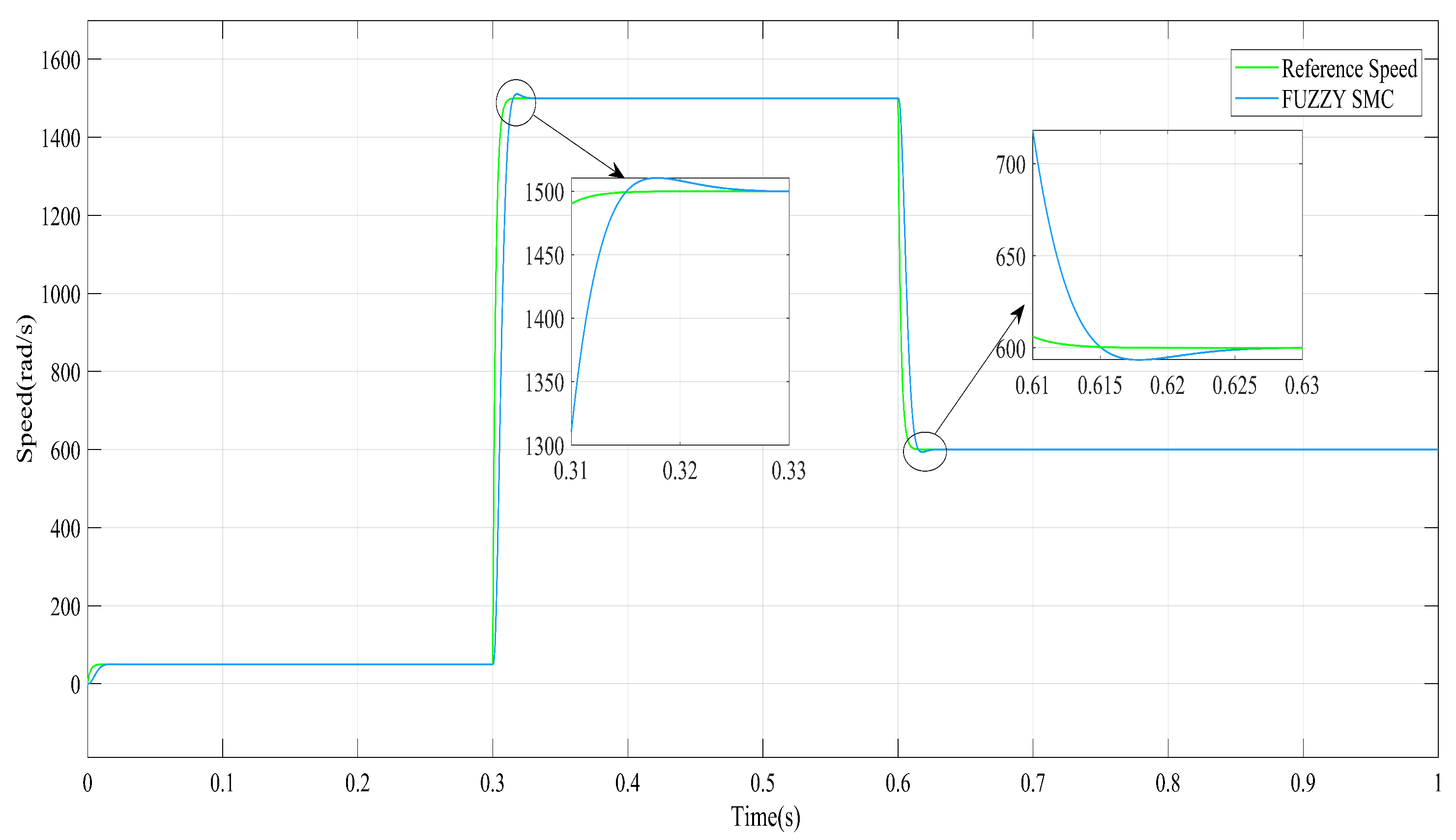
2.1.4. Proposed Fuzzy Sliding Mode Controller
Sliding mode control (SMC) has been used in linear and nonlinear controls. A sliding mode control with a variable control structure is taken as an adaptive observer, which gives the good performance of the drive system with parameter variation and load torque disturbance. The concept of SMC is that the drive response is forced to track or slide the predefined sliding surface. Sliding mode control (SMC) was utilized to create the state observer and as a tracking trajectory for the response of the drive system as the reference model signal. The sliding surface design was focused on to fulfil the reachability condition of the drive system [
30,
31]. The control problem obtains the motor speed to track a specific time-varying command in the presence of model imprecision, load torque disturbances, and measurement noise. In SMC, the system is intended to minimize the tracking error in the way that
, and its rate of change always moves towards a sliding surface. The sliding surface is defined in the state space by the scalar equation [
32].
= 0 where the sliding variable,
s, is:
where
is a positive constant that depends on the bandwidth of the system. The tracking problem is similar to staying on the sliding surface indefinitely, with the sliding variable
s set to zero. The switching surface of a second-order system is a line. The system state is driven onto the switching line by the control input, and once there, the system is limited to stay on the line. The control input is determined by the error trajectory’s distance from the sliding surface and its rate of convergence. At the point where the tracking error trajectory meets the sliding surface, the sign of the control input must change. As a result, the error trajectory is compelled to follow the sliding surface at all times. The system is forced to slide down the sliding surface to the equilibrium point once it reaches the sliding surface. The condition of the sliding mode is [
33]:
where
is a positive constant.
Equation (
89) is stricter than the general sliding condition:
0, and it is equivalent to
To design a sliding mode speed controller for an induction motor drive system, the steps are as follows. Substitute (
88) involving the speed error e in (
90):
The speed dynamics is given by
Equivalently, (
92) can be expressed as
where
is a function.
Differentiating (
93) with respect to time and simplifying:
where
G is a function that may be calculated from the current and speed measurements, and d is the disturbance caused by the load torque, as well as an error in G estimates caused by measurement imperfections. The control effort is the third term, because the q-axis stator voltage command is in charge of adjusting the torque. There is no measurement or estimation in the most basic sliding mode controller. It does not consider G in any way.
It is defined as
where
is given as follows
The parameters of sliding mode controllers are K = 1800, = 2, and .






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}