
Novel Off-Design Operation Maps Showing Functionality Limitations of Organic Rankine Cycle Validated by Experiments
 and
and
Abstract
:1. Introduction
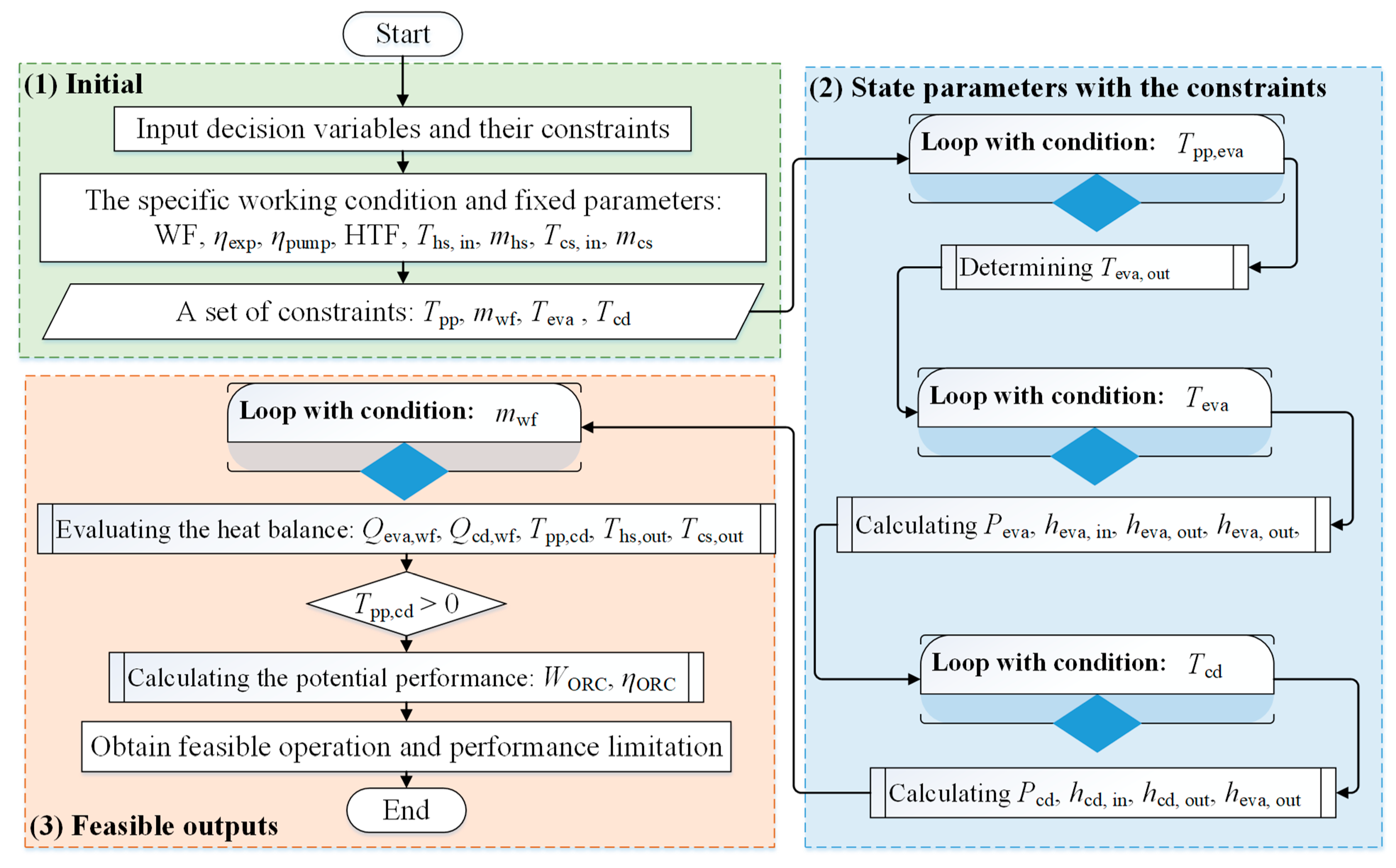
- A methodology for determining the operation maps and functionality limitations of an ORC under specific working conditions was developed. This method surpasses those detailed in other off-design studies in the literature by accounting for the interactions among the multidimensional operation variables and a set of constraints.
- A corresponding formulation and algorithm with general applicability are presented, instead of an empirical formula from experimental results. These are expected to be expanded for the off-design optimization of universal ORC operation.
- The accuracy and reliability of the methodology were validated by three ORC experimental schemes, wherein the mass flow rate of the working fluid, heat source, and cooling source were regulated, respectively.
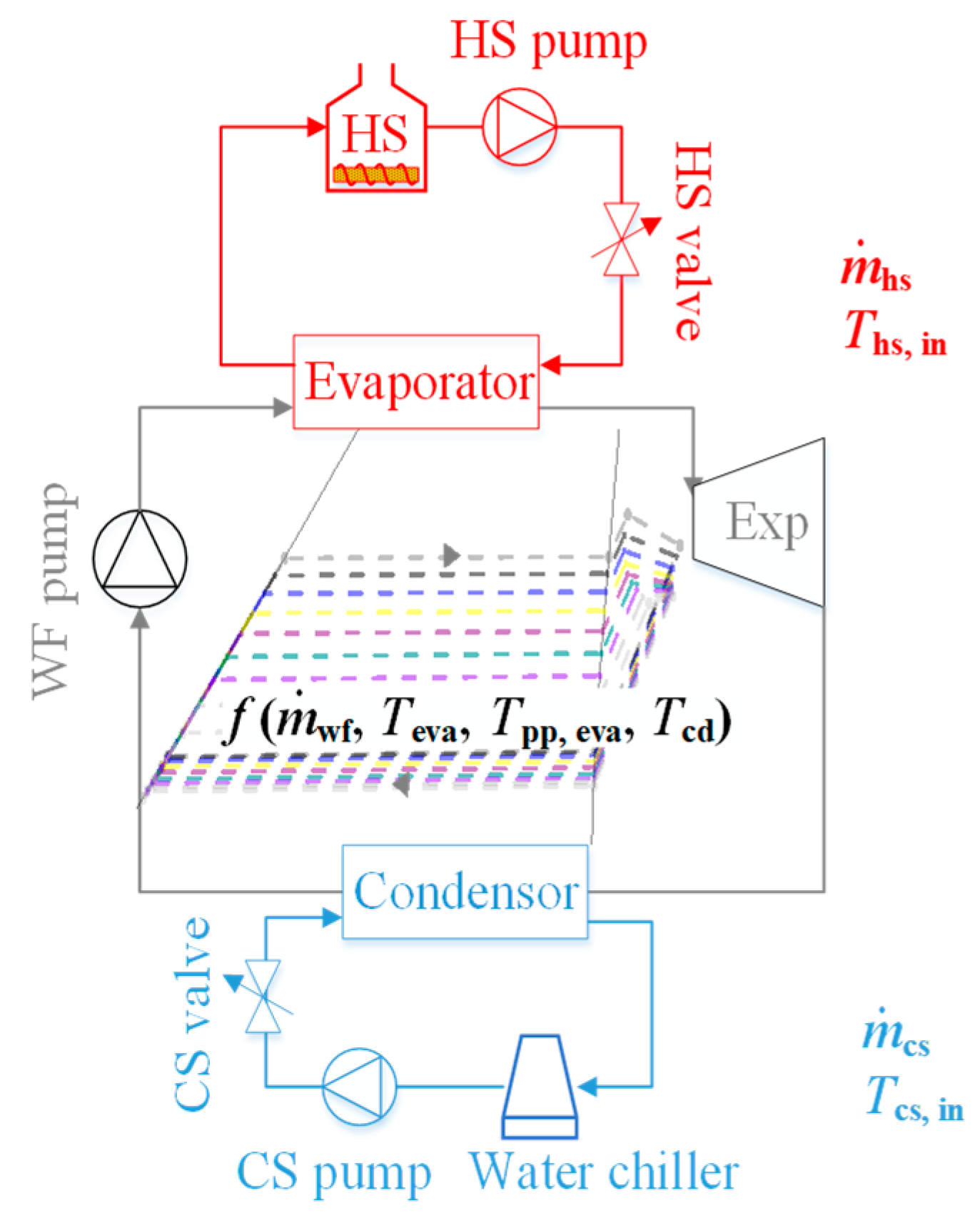
2. Theoretical Analysis and Methodology
3. Results and Discussion
3.1. Operation Maps
3.2. Solution Domain and Functionality Limitations
4. Experimental Validation
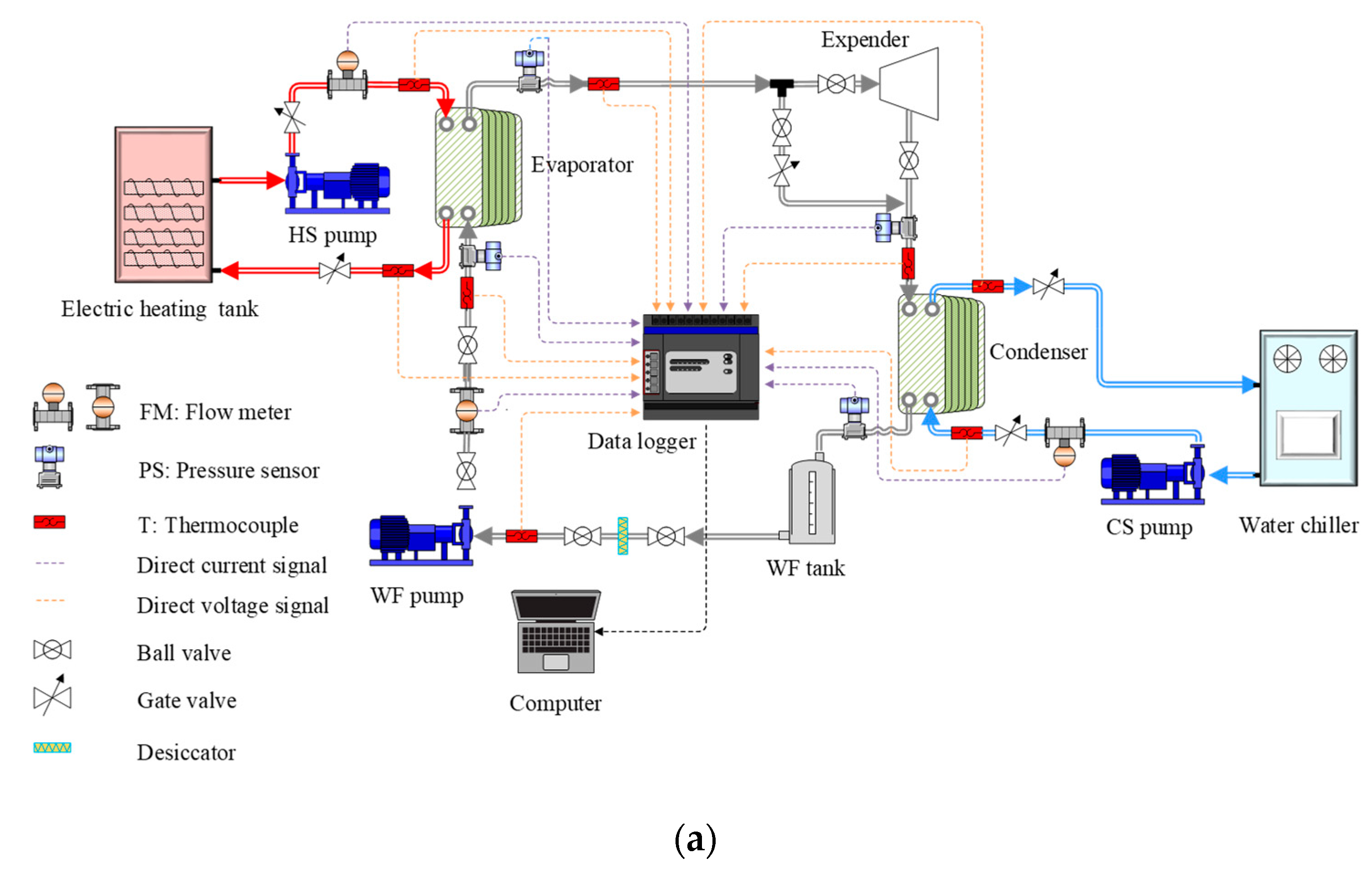
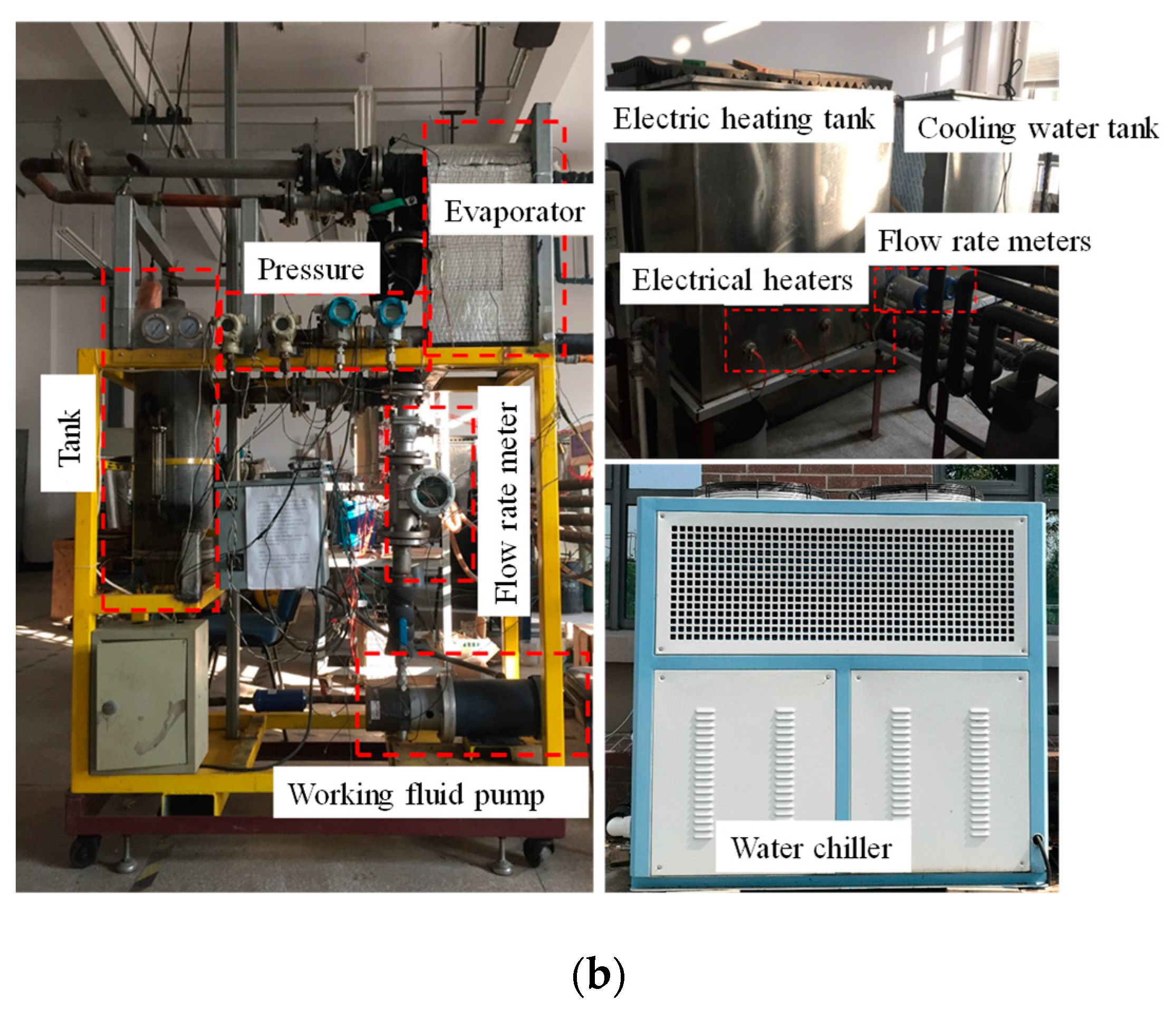
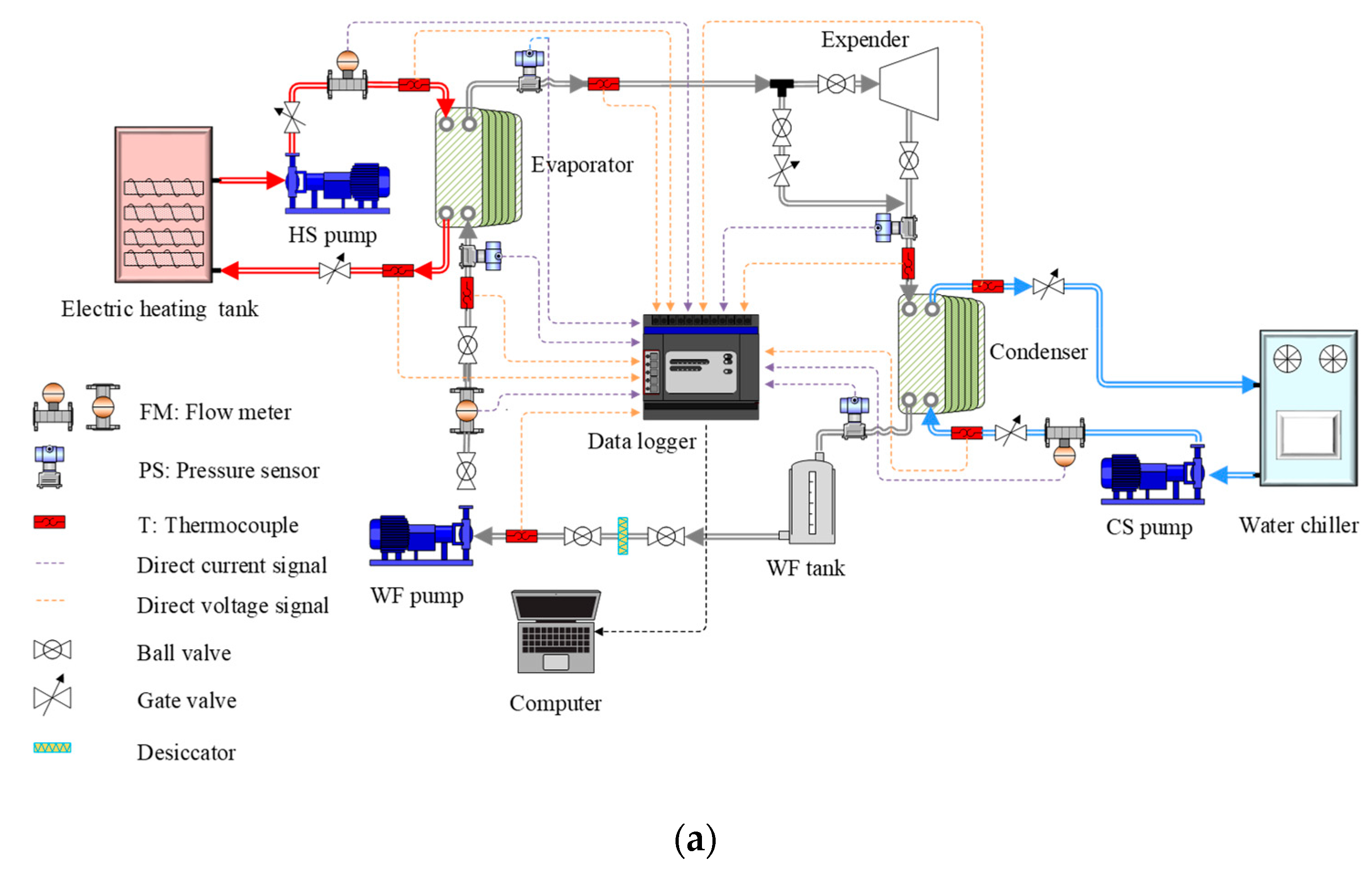
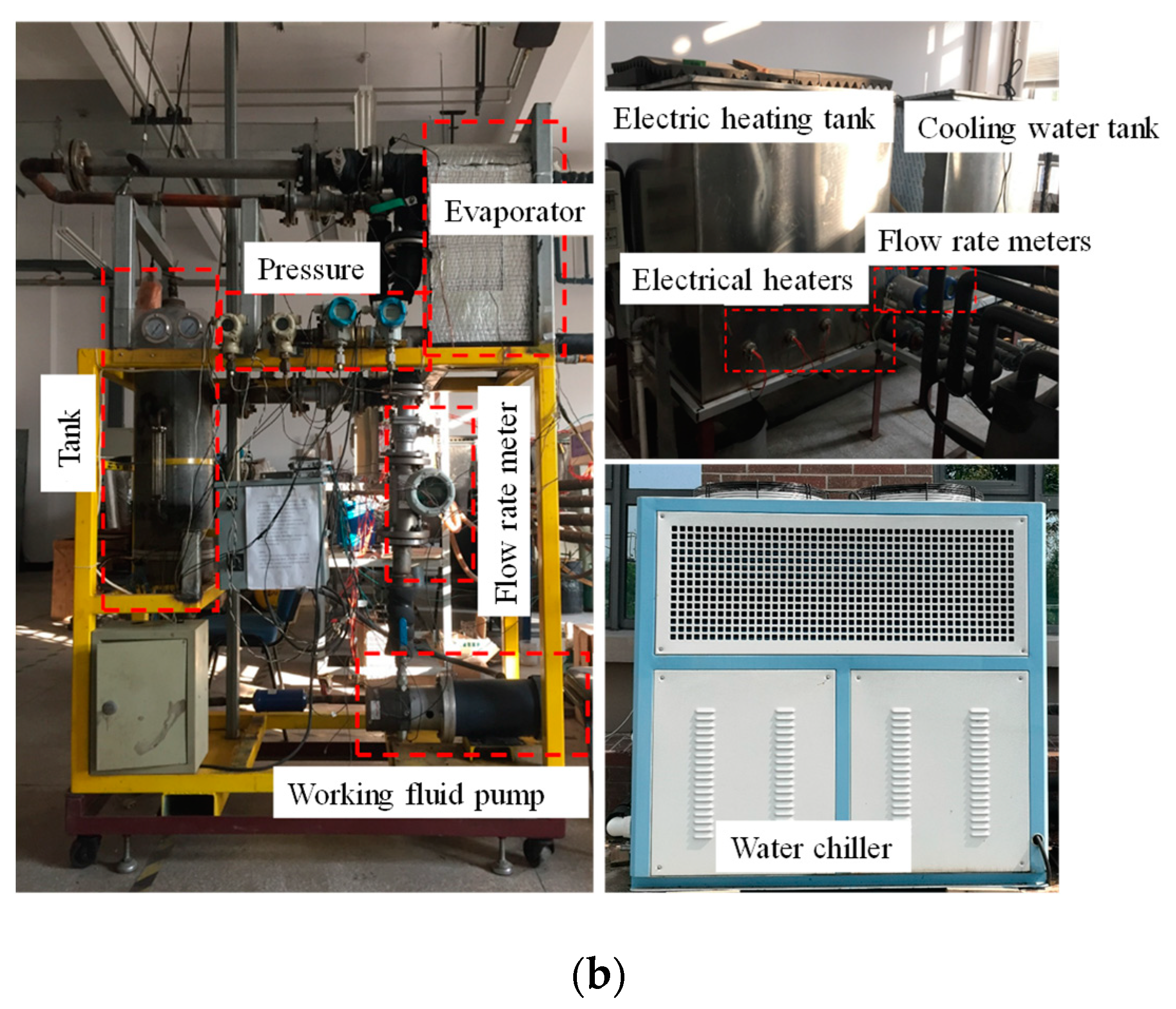
4.1. Description of the Test Rig
4.2. Algorithm Validation
5. Conclusions
- (1)
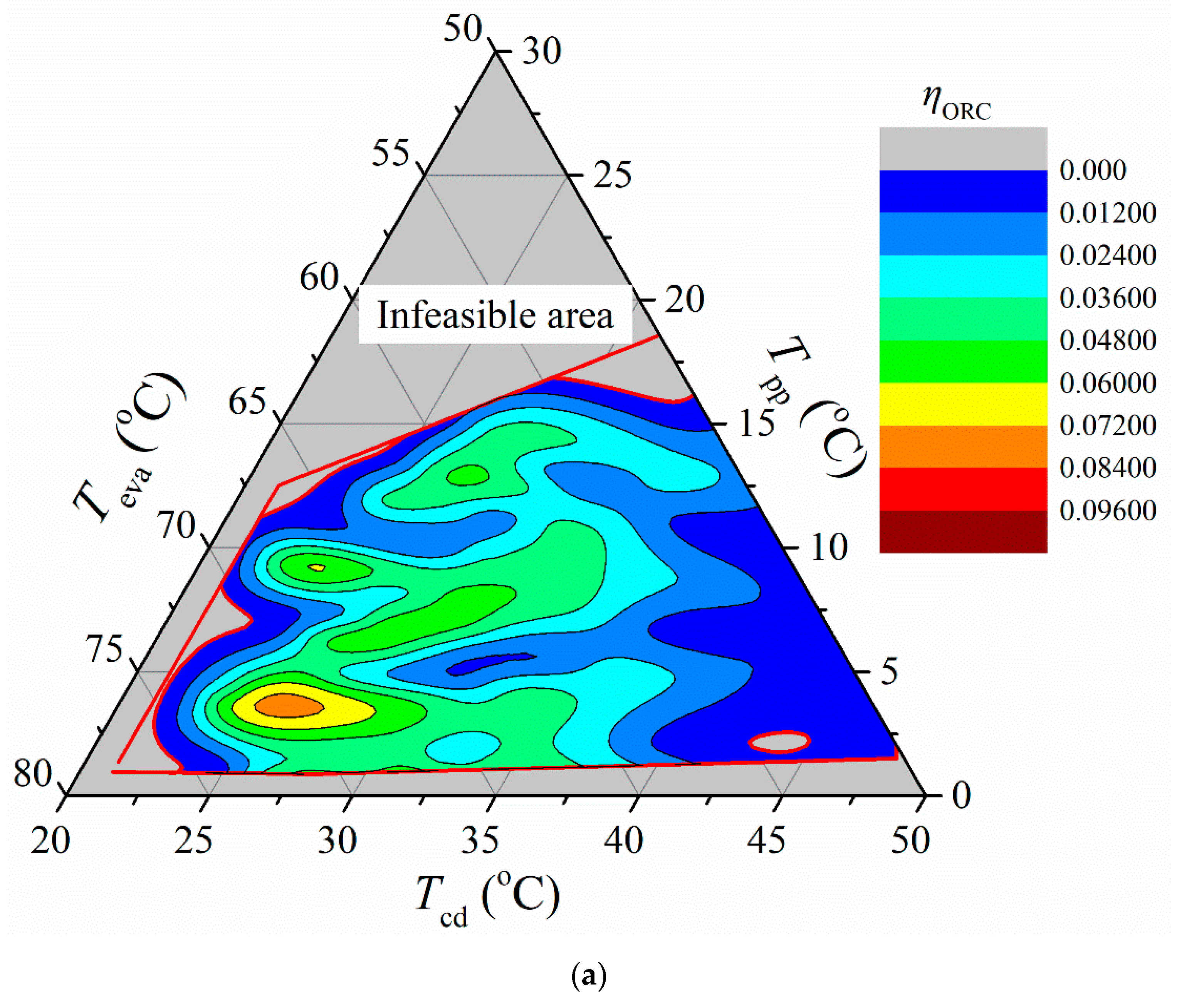
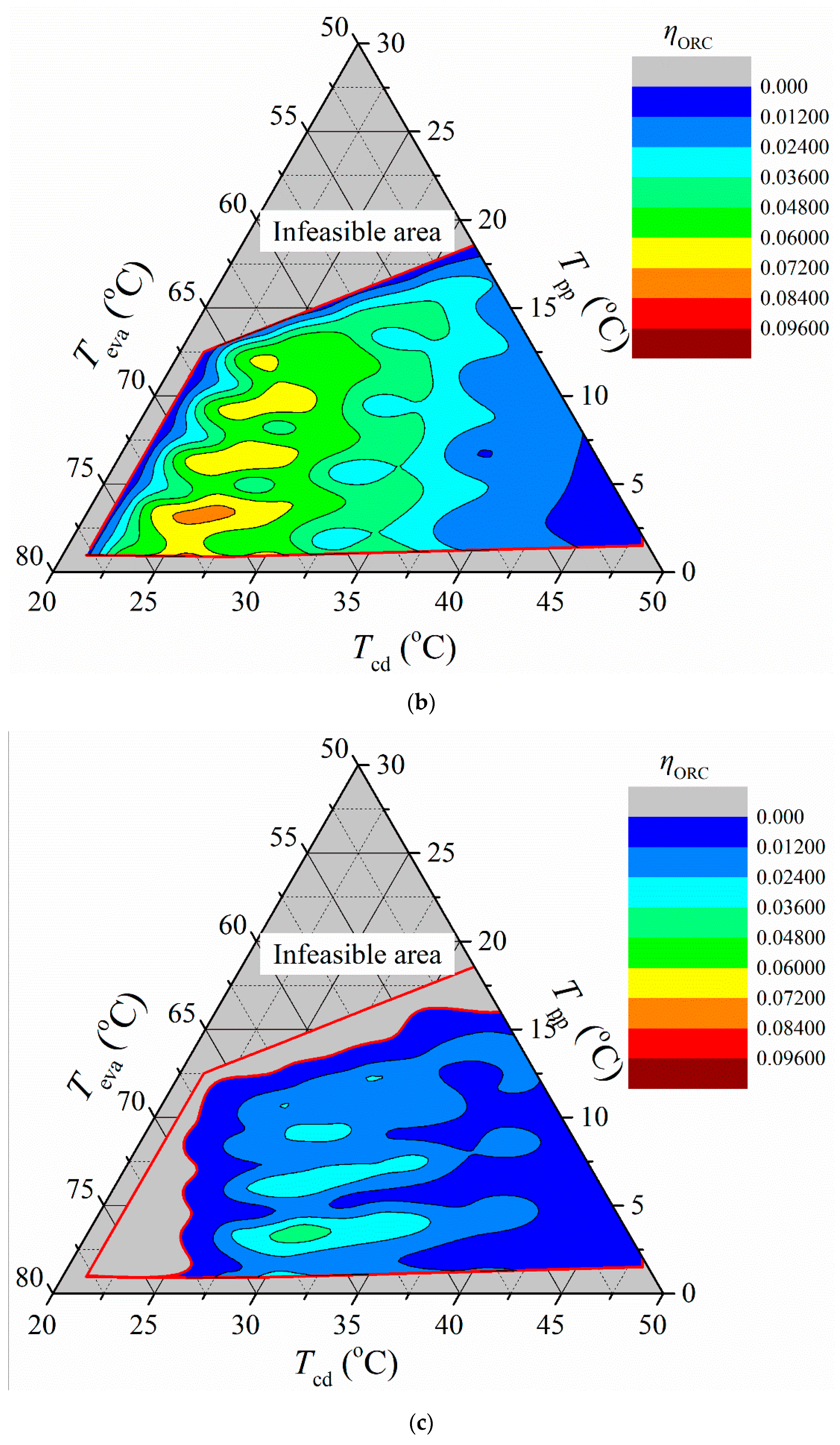
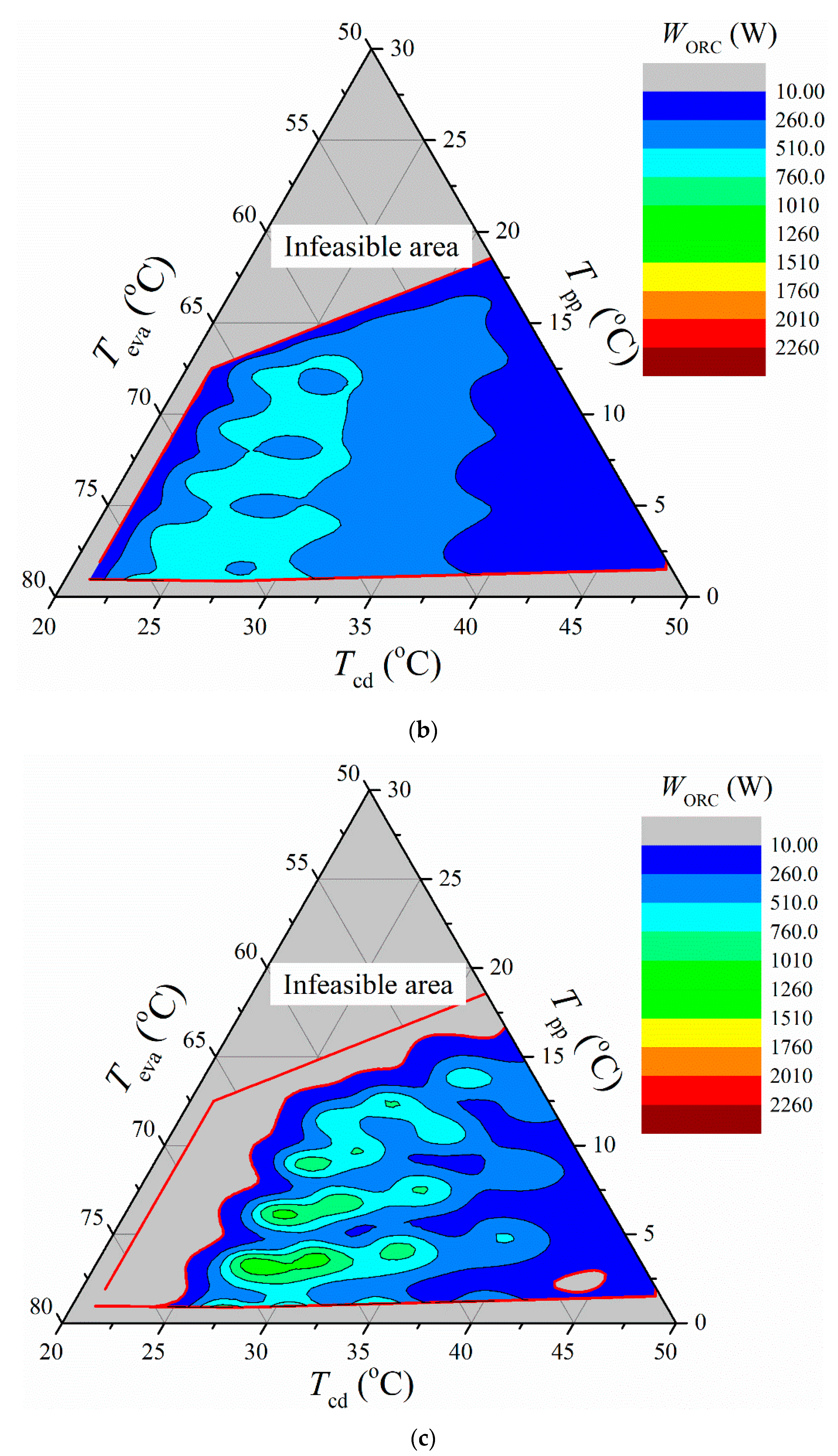
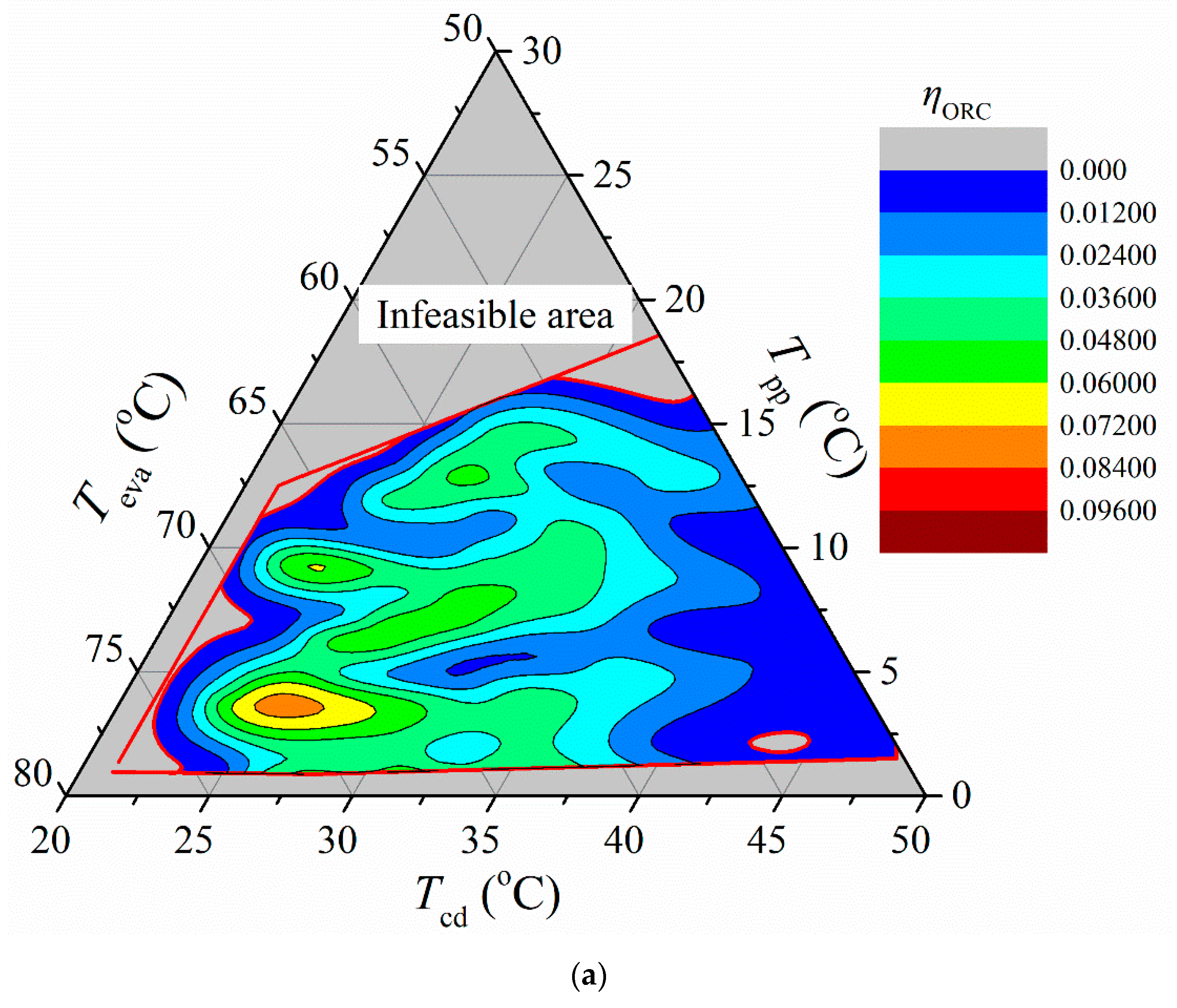
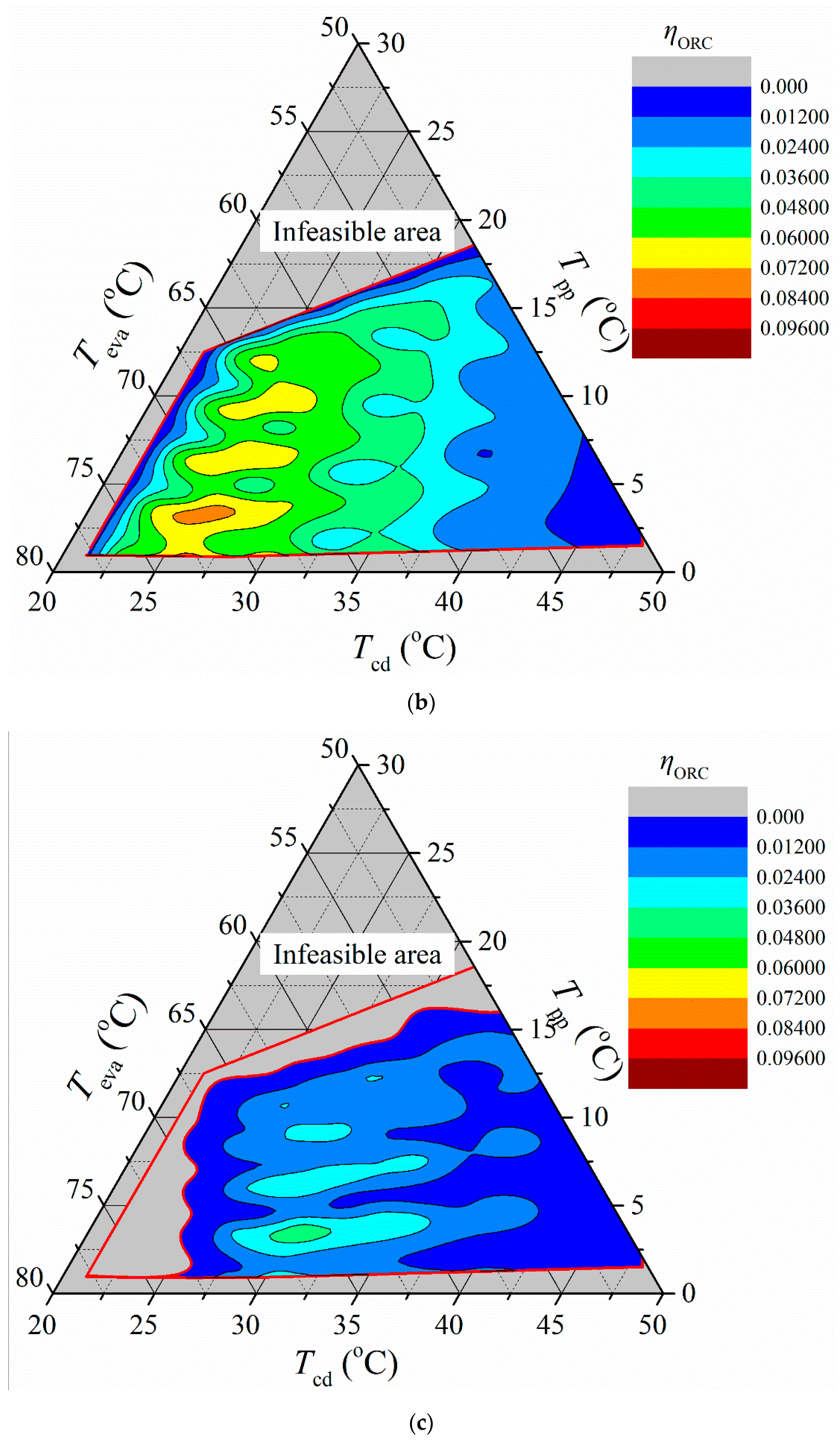
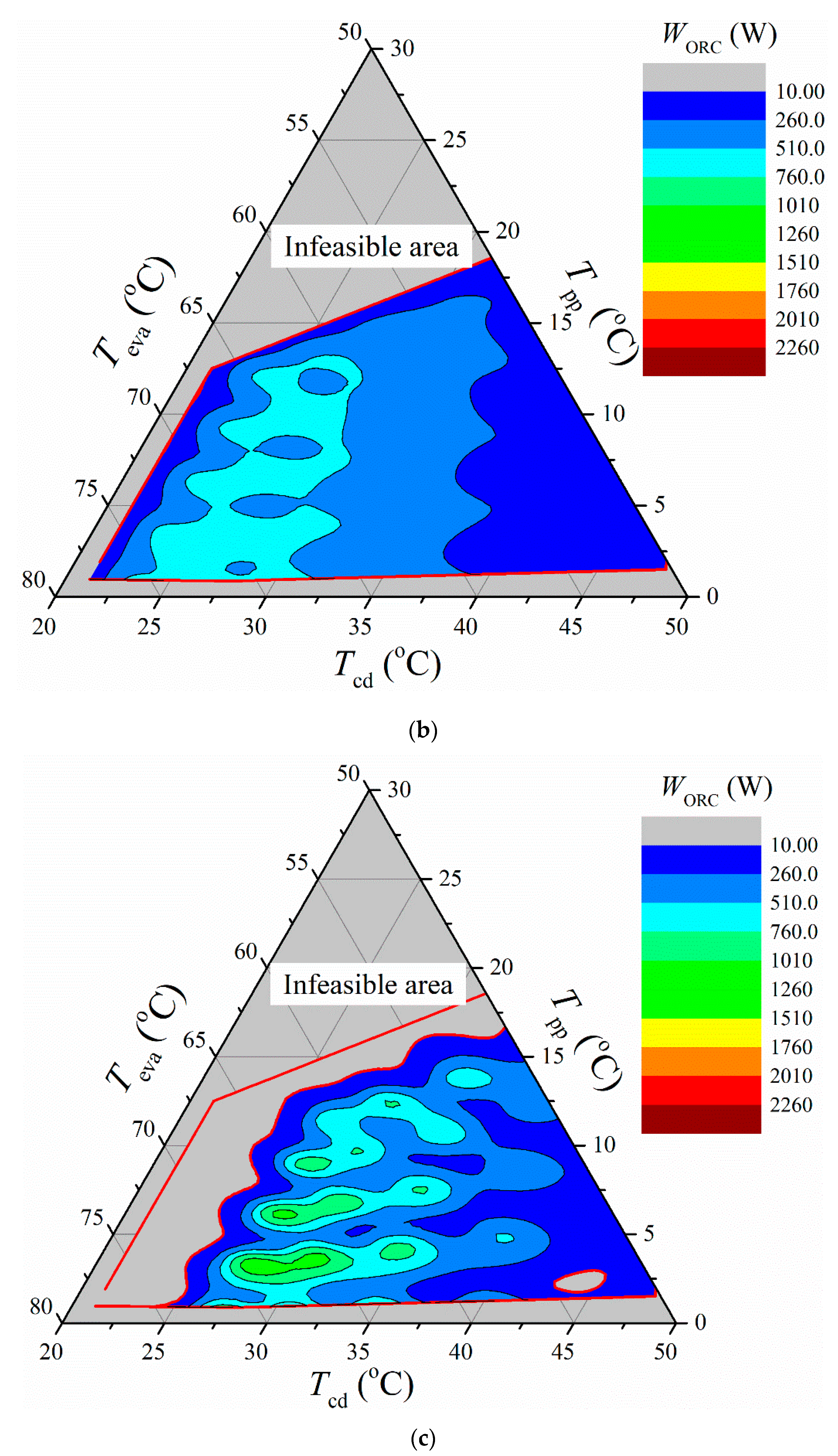
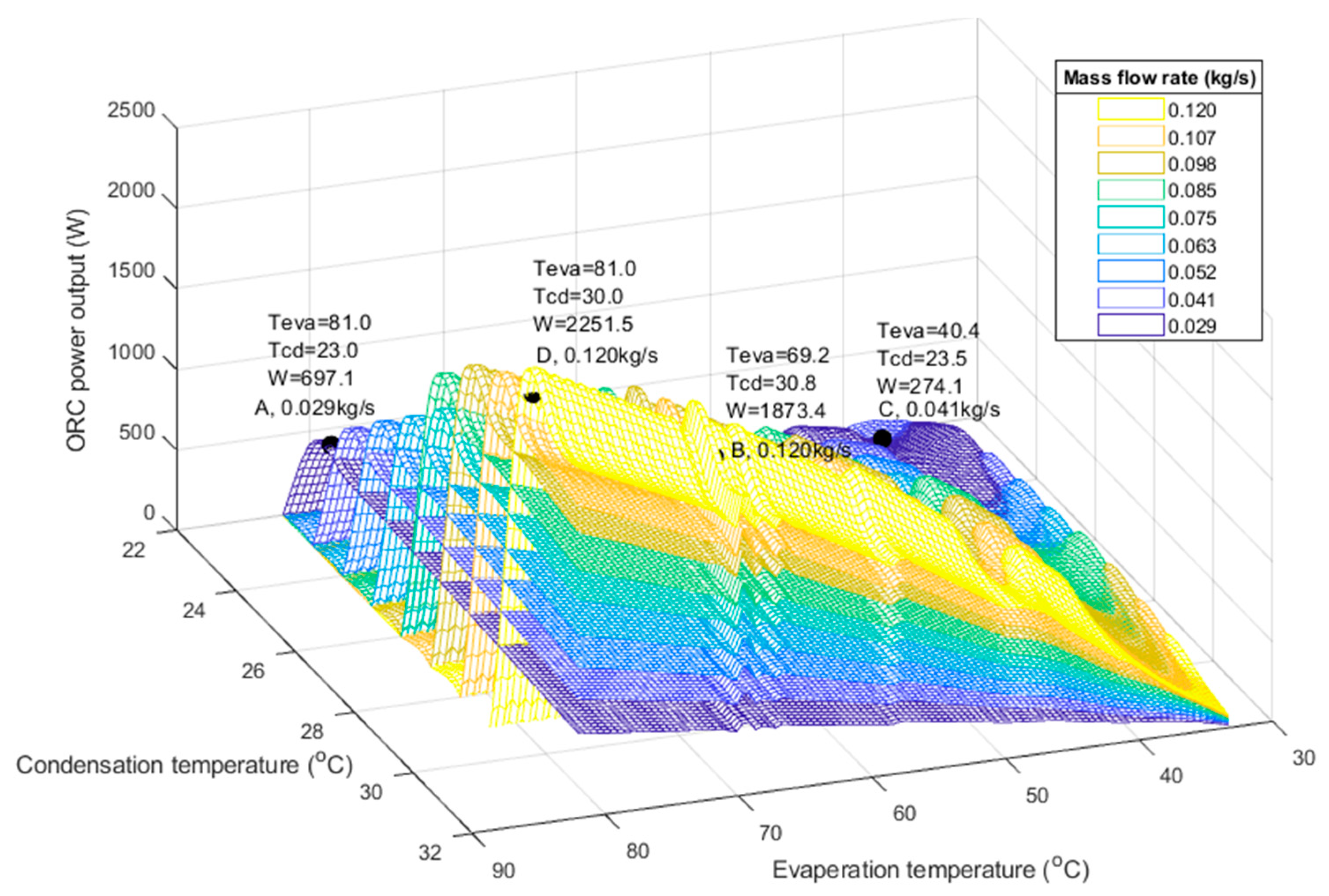
- The off-design performance was indicated by operation maps, which were decided by different combinations of the 4D variables. Under the designated working conditions and constraints, a higher ηORC was generally located in the area with a higher Teva and lower , Tcd, and Tpp,eva. On the other hand, a higher was generally located in the area with the higher Teva and , but lower Tcd and Tpp,eva.
- (2)
- The operation boundaries changed according to the combinations of 4D variables. Under the same Teva, Tcd, and Tpp,eva combination, the feasible areas of both the ηORC and decreased as the increased due to the limitation of the Tpp,cd for successful heat transfer.
- (3)
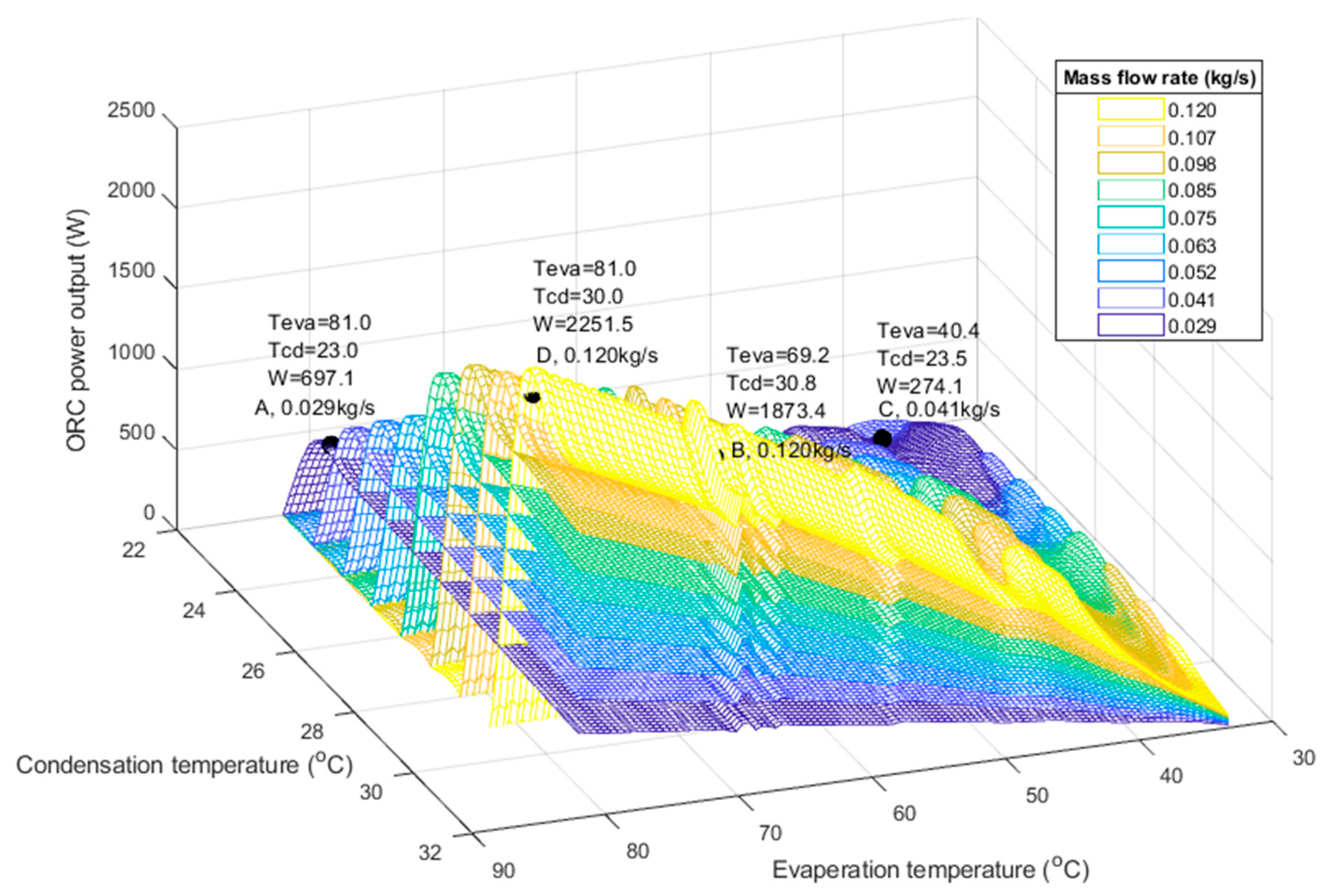
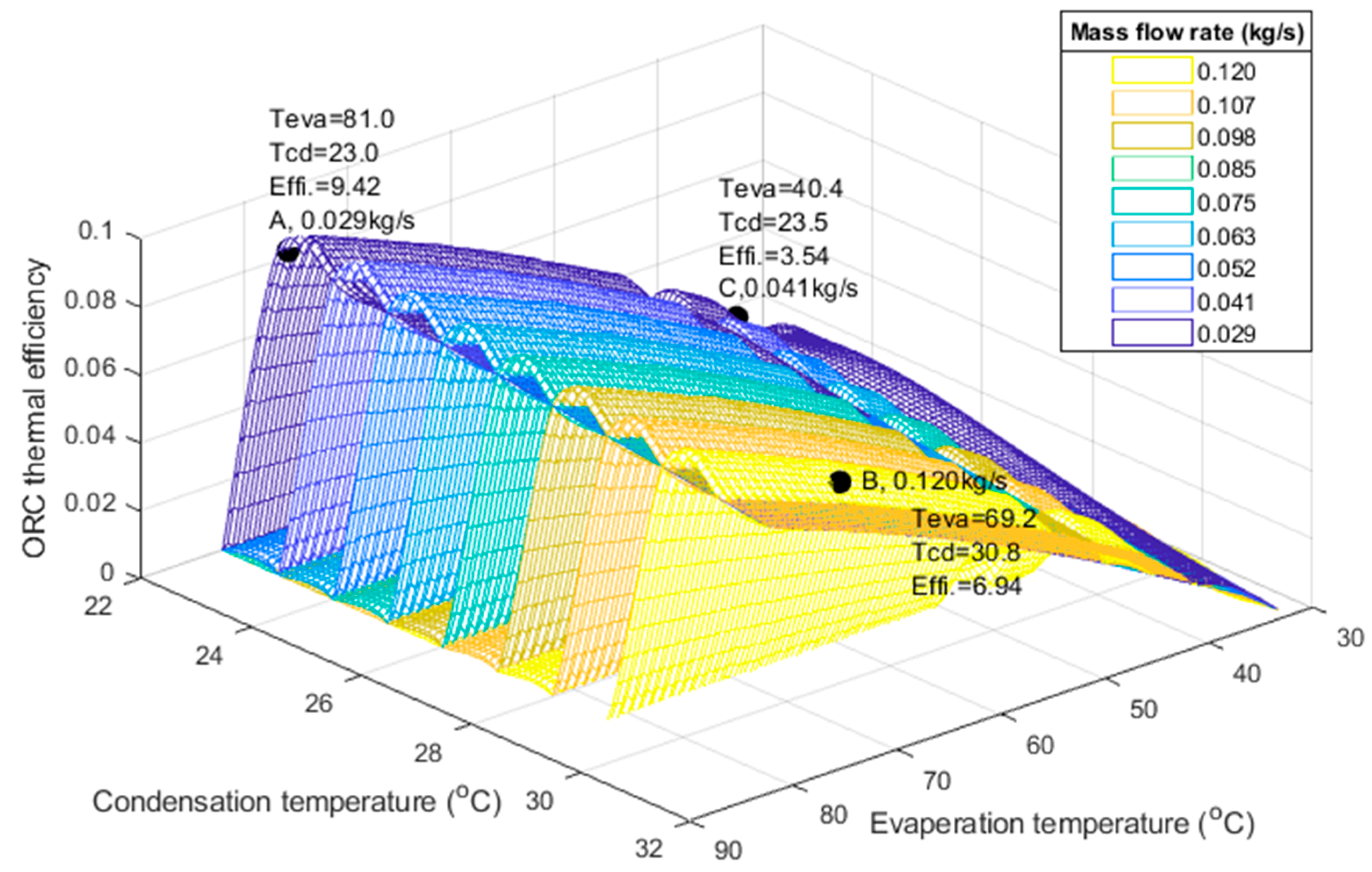
- The functionality limitations were further predicted by the solution domains corresponding to the operation maps. The maximum ηORC was 9.42%, with a of 697.1 W. The maximum was 2251.5 W, with an ηORC of 8.04%. Similar or even identical performances were achieved by numerous combinations of the 4D variables.
- (4)
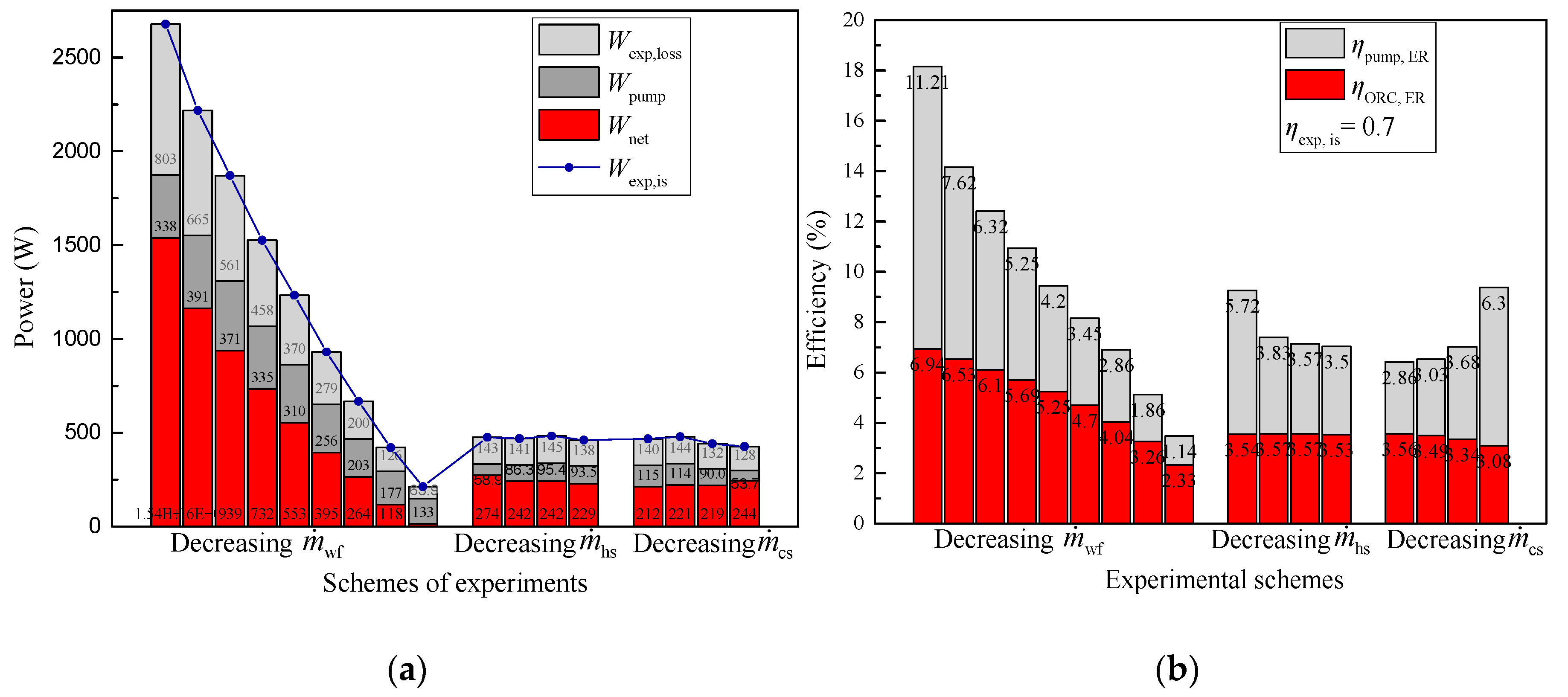
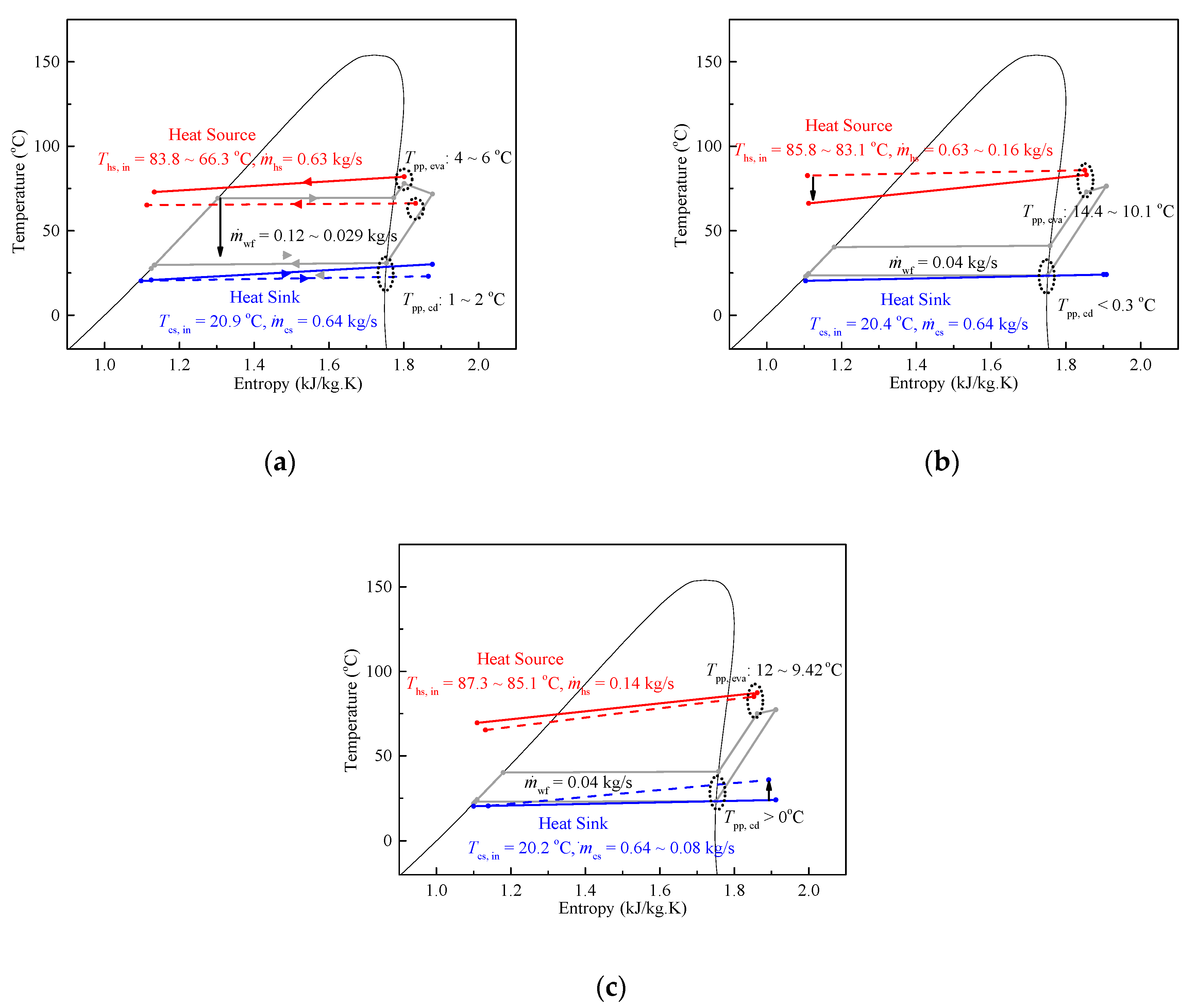
- The accuracy and reliability of the algorithm were validated by experimental results with an value of 0.049 kg and 0.12 kg/s, respectively. Agreement between the theoretical and experimental results was obtained, with a relative error for system performance below 7.64%.
- (5)
- The novel finding that a similar or even identical performance could be achieved under different variable combinations was proven by the experimental results with the regulation of the , , and values, respectively. When the was 0.049 kg/s, the corresponding ηORC,ER fluctuated around 3.08~3.56%, and the fluctuated from 211.7 to 274.1 W, even though the and were changed substantially.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Acronyms | |
| 4D | four-dimensional |
| CS | cooling source |
| HS | heat source |
| HTF | heat transfer fluid |
| MPC | model predictive control |
| ORC | organic Rankine cycle |
| WF | working fluid |
| Symbols | |
| mass flow rate, kg/s | |
| T | temperature, °C |
| power output, kW | |
| x | vapor quality, - |
| Greek symbols | |
| thermal efficiency, % | |
| rotational speed, r/min | |
| Δ | difference |
| Subscripts | |
| cd | condenser |
| cs | cooling source |
| eva | evaporation |
| exp | expander |
| hs | heat source |
| pp | pinch point |
| p | pump |
| sh | superheating |
References
- REN21 REN21 Annual Report 2018–2019. REN21 2019, REN21 Secr. Available online: https://www.ren21.net/wp-content/uploads/2019/05/2018-2019-Annual-Report_FINAL_low-res.pdf (accessed on 1 September 2022).
- IEA. Renewables 2019; IEA: Paris, France, 2019. Available online: https://www.iea.org/reports/renewables-2019 (accessed on 1 September 2022).
- Masood, E.; Keshavarz, A. Combined Cooling, Heating and Power: Decision-Making, Design and Optimization; Elsevier: Amsterdam, The Netherlands, 2014; ISBN 0080999921. [Google Scholar]
- Murugan, S.; Horák, B. Tri and Polygeneration Systems-A Review. Renew. Sustain. Energy Rev. 2016, 60, 1032–1051. [Google Scholar] [CrossRef]
- Zhai, H.; An, Q.; Shi, L.; Lemort, V.; Quoilin, S. Categorization and Analysis of Heat Sources for Organic Rankine Cycle Systems. Renew. Sustain. Energy Rev. 2016, 64, 790–805. [Google Scholar] [CrossRef]
- Quoilin, S.; Aumann, R.; Grill, A.; Schuster, A.; Lemort, V.; Spliethoff, H. Dynamic Modeling and Optimal Control Strategy of Waste Heat Recovery Organic Rankine Cycles. Appl. Energy 2011, 88, 2183–2190. [Google Scholar] [CrossRef]
- Zhang, Y.; Narasimhan, A.K.; Bai, M.; Zhao, L.; Deng, S.; Goswami, D.Y. Dynamic Behavior and Off-Design Performance Analysis of Solar Driven ORC Using Scroll Expanders; Indian Inst Tech Madras: Chennai, India, 2019. [Google Scholar]
- Freeman, J.; Hellgardt, K.; Markides, C.N. Working Fluid Selection and Electrical Performance Optimisation of a Domestic Solar-ORC Combined Heat and Power System for Year-Round Operation in the UK. Appl. Energy 2017, 186, 291–303. [Google Scholar] [CrossRef] [Green Version]
- Song, J.; Gu, C.W.; Ren, X. Parametric Design and Off-Design Analysis of Organic Rankine Cycle (ORC) System. Energy Convers. Manag. 2016, 112, 157–165. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, Y.; Deng, S.; Ni, J.; Xu, W.; Ma, M.; Lin, S.; Yu, Z. Solar Driven ORC-Based CCHP: Comparative Performance Analysis between Sequential and Parallel System Configurations. Appl. Therm. Eng. 2018, 131, 696–706. [Google Scholar] [CrossRef]
- Wang, Y.; Song, J.; Chatzopoulou, M.A.; Sunny, N.; Simpson, M.C.; Wang, J.; Markides, C.N. A Holistic Thermoeconomic Assessment of Small-Scale, Distributed Solar Organic Rankine Cycle (ORC) Systems: Comprehensive Comparison of Configurations, Component and Working Fluid Selection. Energy Convers. Manag. 2021, 248, 114618. [Google Scholar] [CrossRef]
- Chatzopoulou, M.A.; Simpson, M.; Sapin, P.; Markides, C.N. Off-Design Optimisation of Organic Rankine Cycle (ORC) Engines with Piston Expanders for Medium-Scale Combined Heat and Power Applications. Appl. Energy 2019, 238, 1211–1236. [Google Scholar] [CrossRef]
- Wolff, C.; Schulz, P.; Knirr, M.; Priebe, K.-P.; Strumberg, J.V.J. Flexible and Controllable ORC Turbine for Smart Energy Systems. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016. [Google Scholar]
- Hernandez, A.; Desideri, A.; Gusev, S.; Ionescu, C.M.; Van Den Broek, M.; Quoilin, S.; Lemort, V.; De Keyser, R. Design and Experimental Validation of an Adaptive Control Law to Maximize the Power Generation of a Small-Scale Waste Heat Recovery System. Appl. Energy 2017, 203, 549–559. [Google Scholar] [CrossRef]
- Pierobon, L.; Casati, E.; Casella, F.; Haglind, F.; Colonna, P. Design Methodology for Flexible Energy Conversion Systems Accounting for Dynamic Performance. Energy 2014, 68, 667–679. [Google Scholar] [CrossRef]
- Antonelli, M.; Baccioli, A.; Francesconi, M.; Desideri, U. Dynamic Modelling of a Low-Concentration Solar Power Plant: A Control Strategy to Improve Flexibility. Renew. Energy 2016, 95, 574–585. [Google Scholar] [CrossRef]
- Ireland Melissa, K.; Orosz Matthew, S.; Brisson, J.G.; Desideri Adriano, Q.S. Dynamic Modeling and Control System Definition for a Micro-CSP Plant Coupled with Thermal Storage Unit. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, GT2014, Dusseldorf, Germany, 16–20 June 2014. [Google Scholar]
- Manente, G.; Toffolo, A.; Lazzaretto, A.; Paci, M. An Organic Rankine Cycle Off-Design Model for the Search of the Optimal Control Strategy. Energy 2013, 58, 97–106. [Google Scholar] [CrossRef]
- Quoilin, S.; Desideri, A.; Wronski, J.; Bell, I.; Lemort, V. ThermoCycle: A Modelica Library for the Simulation of Thermodynamic Systems. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; Volume 96, pp. 683–692. [Google Scholar] [CrossRef] [Green Version]
- Desideri, A.; Hernandez, A.; Gusev, S.; van den Broek, M.; Lemort, V.; Quoilin, S. Steady-State and Dynamic Validation of a Small-Scale Waste Heat Recovery System Using the ThermoCycle Modelica Library. Energy 2016, 115, 684–696. [Google Scholar] [CrossRef]
- Zhang, Y.; Deng, S.; Zhao, L.; Lin, S.; Ni, J.; Ma, M.; Xu, W. Optimization and Multi-Time Scale Modeling of Pilot Solar Driven Polygeneration System Based on Organic Rankine Cycle. Appl. Energy 2018, 222, 396–409. [Google Scholar] [CrossRef]
- Cao, S.; Xu, J.; Miao, Z.; Liu, X.; Zhang, M.; Xie, X.; Li, Z.; Zhao, X.; Tang, G. Steady and Transient Operation of an Organic Rankine Cycle Power System. Renew. Energy 2019, 133, 284–294. [Google Scholar] [CrossRef]
- Feng, Y.Q.; Hung, T.C.; Wu, S.L.; Lin, C.H.; Li, B.X.; Huang, K.C.; Qin, J. Operation Characteristic of a R123-Based Organic Rankine Cycle Depending on Working Fluid Mass Flow Rates and Heat Source Temperatures. Energy Convers. Manag. 2017, 131, 55–68. [Google Scholar] [CrossRef]
- Kim, I.S.; Kim, T.S.; Lee, J.J. Off-Design Performance Analysis of Organic Rankine Cycle Using Real Operation Data from a Heat Source Plant. Energy Convers. Manag. 2017, 133, 284–291. [Google Scholar] [CrossRef]
- Jang, Y.; Lee, J. Comprehensive Assessment of the Impact of Operating Parameters on Sub 1-KW Compact ORC Performance. Energy Convers. Manag. 2019, 182, 369–382. [Google Scholar] [CrossRef]
- Torregrosa, A.; Galindo, J.; Dolz, V.; Royo-Pascual, L.; Haller, R.; Melis, J. Dynamic Tests and Adaptive Control of a Bottoming Organic Rankine Cycle of IC Engine Using Swash-Plate Expander. Energy Convers. Manag. 2016, 126, 168–176. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, M.; Fang, F.; Xu, J.; Li, K. Gain Scheduling Control of Waste Heat Energy Conversion Systems Based on an LPV (Linear Parameter Varying) Model. Energy 2016, 107, 773–783. [Google Scholar] [CrossRef]
- Seitz, D.; Gehring, O.; Bunz, C.; Brunschier, M.; Sawodny, O. Model-Based Control of Exhaust Heat Recovery in a Heavy-Duty Vehicle. Control Eng. Pract. 2018, 70, 15–28. [Google Scholar] [CrossRef]
- Rathod, D.; Xu, B.; Filipi, Z.; Hoffman, M. An Experimentally Validated, Energy Focused, Optimal Control Strategy for an Organic Rankine Cycle Waste Heat Recovery System. Appl. Energy 2019, 256, 113991. [Google Scholar] [CrossRef]
- Palagi, L.; Pesyridis, A.; Sciubba, E.; Tocci, L. Machine Learning for the Prediction of the Dynamic Behavior of a Small Scale ORC System. Energy 2019, 166, 72–82. [Google Scholar] [CrossRef]
- Feng, Y.Q.; Liu, Y.Z.; Wang, X.; He, Z.X.; Hung, T.C.; Wang, Q.; Xi, H. Performance Prediction and Optimization of an Organic Rankine Cycle (ORC) for Waste Heat Recovery Using Back Propagation Neural Network. Energy Convers. Manag. 2020, 226, 113552. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, M.; Shi, F.; Meng, J.; Xu, J. Set Point Optimization of Controlled Organic Rankine Cycle Systems. Chin. Sci. Bull. 2014, 59, 4397–4404. [Google Scholar] [CrossRef]
- Narasimhan, A.K.; Wickramaratne, C.; Kamal, R.; Goswami, D.Y.; Singh, P. Mapping Scroll Expander Performance for Organic Working Fluids Using Dimensionless Parameters in Ns-Ds Diagram. Energy 2019, 182, 739–752. [Google Scholar] [CrossRef]
- Ma, Z.; Bao, H.; Roskilly, A.P. Dynamic Modelling and Experimental Validation of Scroll Expander for Small Scale Power Generation System. Appl. Energy 2017, 186, 262–281. [Google Scholar] [CrossRef]
- Wang, J.; Yan, Z.; Zhao, P.; Dai, Y. Off-Design Performance Analysis of a Solar-Powered Organic Rankine Cycle. Energy Convers. Manag. 2014, 80, 150–157. [Google Scholar] [CrossRef]
- Liu, L.; Zhu, T.; Gao, N.; Gan, Z. A Review of Modeling Approaches and Tools for the Off-Design Simulation of Organic Rankine Cycle. J. Therm. Sci. 2018, 27, 305–320. [Google Scholar] [CrossRef]
- Chatzopoulou, M.A.; Lecompte, S.; De Paepe, M.; Markides, C.N. Off-Design Optimisation of Organic Rankine Cycle (ORC) Engines with Different Heat Exchangers and Volumetric Expanders in Waste Heat Recovery Applications. Appl. Energy 2019, 253, 113442. [Google Scholar] [CrossRef]
- Lecompte, S.; Gusev, S.; Vanslambrouck, B.; De Paepe, M. Experimental Results of a Small-Scale Organic Rankine Cycle: Steady State Identification and Application to off-Design Model Validation. Appl. Energy 2018, 226, 82–106. [Google Scholar] [CrossRef]
- US Department of Commerce, N. NIST Standard Reference Database 23: Reference Fluid Thermodynamic and Transport Properties-REFPROP; Version 9.1; NIST NSRDS, National Institute of Standards and Technology: Boulder, Colorado, 2013.
- Zhao, L.; Zhu, Y.; Gao, P.; Zhang, L. Assumption and Criterion of Incomplete Condensation of Zeotropic Refrigerants. Huagong Xuebao/J. Chem. Ind. Eng. 2007, 58, 2727–2732. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Point B | Point C | ||||
|---|---|---|---|---|---|---|
| Experimental Result | Theoretical Result | Relative Error (%) | Experimental Result | Theoretical Result | Relative Error (%) | |
| 4D variables | ||||||
| (kg/s) | 0.120 | 0.120 | 0 | 0.041 | 0.041 | 0 |
| Teva (°C) | 69.2 | 67.0 | 3.18 | 40.8 | 41.8 | 2.45 |
| Tc (°C) | 30.8 | 30.1 | 2.27 | 23.5 | 24 | 2.13 |
| Predicted performance | ||||||
| (W) | 1874.7 | 1770.3 | 5.56 | 274.1 | 289.75 | 5.71 |
| ηORC (%) | 6.94 | 6.41 | 7.64 | 3.54 | 3.61 | 1.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhao, L.; Deng, S.; Li, M.; Liu, Y.; Yu, Q.; Li, M. Novel Off-Design Operation Maps Showing Functionality Limitations of Organic Rankine Cycle Validated by Experiments. Energies 2022, 15, 8240. https://doi.org/10.3390/en15218240
Zhang Y, Zhao L, Deng S, Li M, Liu Y, Yu Q, Li M. Novel Off-Design Operation Maps Showing Functionality Limitations of Organic Rankine Cycle Validated by Experiments. Energies. 2022; 15(21):8240. https://doi.org/10.3390/en15218240
Chicago/Turabian StyleZhang, Ying, Li Zhao, Shuai Deng, Ming Li, Yali Liu, Qiongfen Yu, and Mengxing Li. 2022. "Novel Off-Design Operation Maps Showing Functionality Limitations of Organic Rankine Cycle Validated by Experiments" Energies 15, no. 21: 8240. https://doi.org/10.3390/en15218240
APA StyleZhang, Y., Zhao, L., Deng, S., Li, M., Liu, Y., Yu, Q., & Li, M. (2022). Novel Off-Design Operation Maps Showing Functionality Limitations of Organic Rankine Cycle Validated by Experiments. Energies, 15(21), 8240. https://doi.org/10.3390/en15218240