
Overview of Integrated Electric Motor Drives: Opportunities and Challenges




Abstract
:1. Introduction
- (1)
- The thermal coupling of the motor and converter poses new challenges for system heat dissipation.
- (2)
- The influence of the size of the DC-link capacitor. Excessive DC-link capacitance increases the system size and poses vibration problems.
- (3)
- The design of the IMMDs structure requires careful consideration of the effects of various complex factors.
- (4)
- The IMMDs system requires the selection of a suitable converter to reduce the capacitance volume and achieve better control.
- (5)
- Electromagnetic interference (EMI) issues between the converter and the motor.
2. Integrated Motor Drive Structure Design
2.1. IMDs Development
2.2. IMMDs Structure
2.3. IMDs Classification
- (1)
- Interleaving the gate signals of two IMMDs modules can effectively reduce the size of the DC-link capacitors.
- (2)
- Modular design reduces maintenance and fault detection costs.
- (3)
- Better thermal performance, IMMDs have a larger thermal surface area and require a global thermal design.
- (4)
- IMMDs have a smaller size and weight and higher power density.
- (5)
- The input voltage per module is lower, and the motor’s life is longer. In addition, the lower module voltage allows many wide-band devices to be used. The result is a motor with better high-temperature performance and efficiency, which can be further optimized in size.
3. Integrated Motor Drives Converters
3.1. Commonly Used Converters for IMDs
3.2. Converter Volume Optimization
- (1)
- Gate signal interleaving technique optimizes the capacitor volume by reducing the current and voltage ripple of the capacitor.
- (2)
- Carrier phase shifting reduces the ripple current by approximately 75% through optimal carrier phase shifting [73].
- (3)
- Optimization of the inverter topology to achieve a reduction in DC voltage requirements.
- (4)
- Modular series connection of drivers to reduce the DC voltage on each driver.
- (5)
- Use wide-band semiconductors to increase the driver’s operating frequency and thus reduce the size of the passive components. In addition, the excellent thermal properties of wide-band semiconductors improve the heat generation of the IMDs and help to increase the life of the capacitor.
- (1)
- Reduced volume and height.
- (2)
- High power density due to size optimization.
- (3)
- Low cost.
- (4)
- High mechanical durability and service life.
3.3. LCL Filter Integration
4. Integrated Motor Drives Cooling and EMI Design
4.1. IMDs Heat Dissipation
4.2. Integrated Cooling Technology of the Converter and Motor
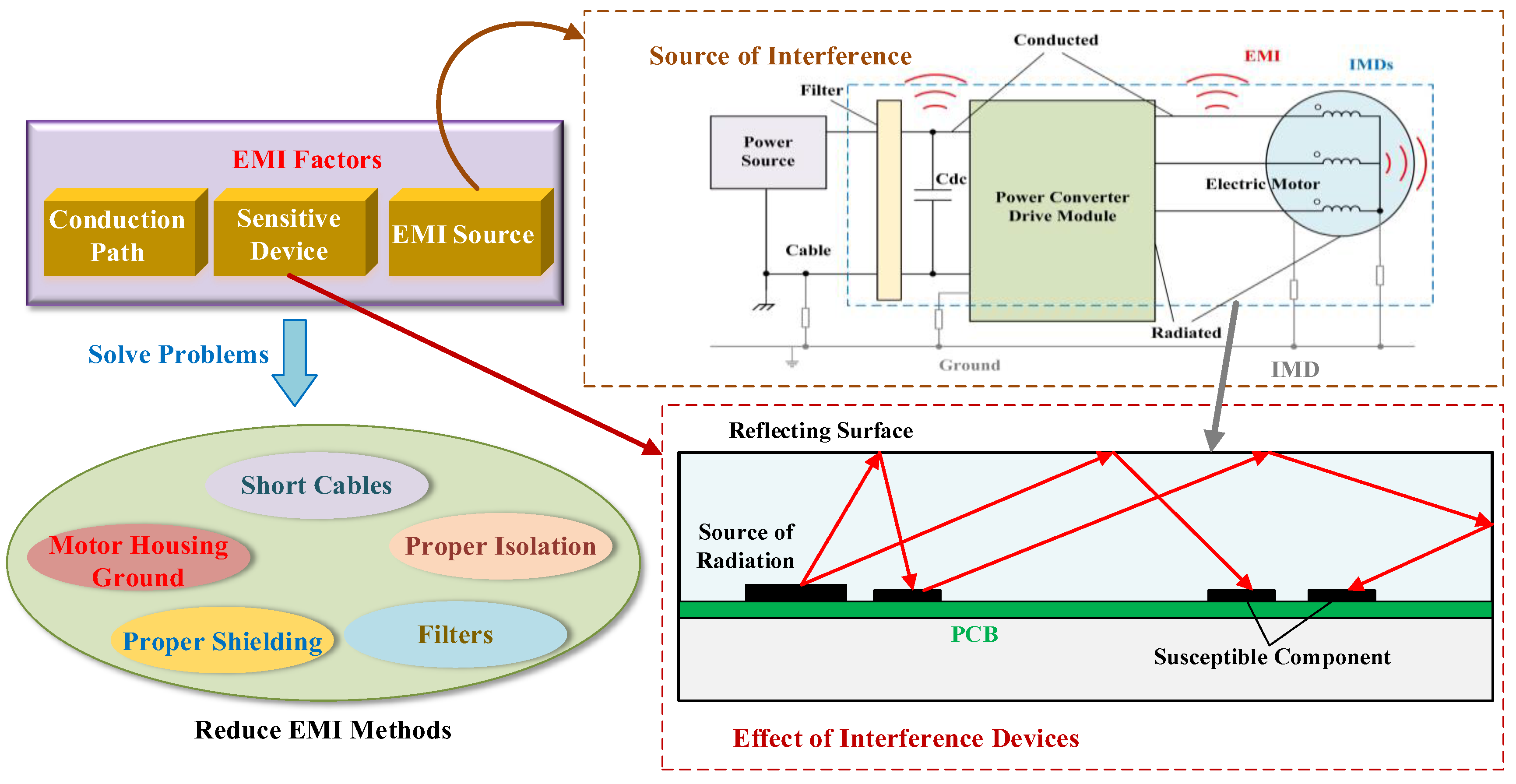
4.3. EMI Design
5. Integrated Motor Drives Opportunities and Challenges
5.1. IMDs Opportunities
5.2. IMD Challenges
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Swanke, J.; Zeng, H.; Bobba, D.; Jahns, T.M.; Sarlioglu, B. Design and Testing of a Modular High-Speed Permanent-Magnet Machine for Aerospace Propulsion. In Proceedings of the 2021 IEEE International Electric Machines & Drives Conference (IEMDC), New York, NY, USA, 16–18 May 2021; pp. 1–8. [Google Scholar]
- Diab, M.S.; Elserougi, A.A.; Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. A Nine-Switch-Converter-Based Integrated Motor Drive and Battery Charger System for EVs Using Symmetrical Six-Phase Machines. IEEE Trans. Ind. Electron. 2016, 63, 5326–5335. [Google Scholar] [CrossRef]
- Fang, S.; Wang, Y.; Wang, W.; Chen, Y.; Chen, Y. Design of permanent magnet synchronous motor servo system based on improved particle swarm optimization. IEEE Trans. Power Electron. 2021, 37, 5833–5846. [Google Scholar] [CrossRef]
- Abebe, R.; Vakil, G.; Lo Calzo, G.; Cox, T.; Lambert, S.; Johnson, M.; Gerada, C.; Mecrow, B. Integrated Motor Drives: State of the Art and Future Trends. IET Electr. Power Appl. 2016, 10, 757–771. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Song, Z.; Zhao, F.; Liu, C. Overview of Propulsion Systems for Unmanned Aerial Vehicles. Energies 2022, 15, 455. [Google Scholar] [CrossRef]
- Haghbin, S.; Lundmark, S.; Carlson, O.; Alaküla, M. A Combined Motor/Drive/Battery Charger Based on a Split-Windings PMSM. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Mohammed, O.A.; Liu, S.; Liu, Z. A Phase Variable PM Machine Model for Integrated Motor Drive Systems. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference, New York, NY, USA, 20–25 June 2004; pp. 4825–4831. [Google Scholar]
- Swanke, J.; Jahns, T.M. Reliability Analysis of a Fault-Tolerant Integrated Modular Motor Drive (IMMD) for an Urban Air Mobility (UAM) Aircraft Using Markov Chains. In Proceedings of the 2021 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Denver, CO, USA, 11–13 August 2021; pp. 1–8. [Google Scholar]
- David, P.T. Putting It Together-Integrated Motor and Drives. Electr. Appar. 2002. [Google Scholar]
- Shakweh, Y.; Owen, G.H.; Hall, D.J.; Miller, H. Plug and Play Integrated Motor Drives. In Proceedings of the International Conference on Power Electronics, Machines and Drives, Bath, UK, 16–18 April 2002; pp. 655–661. [Google Scholar]
- Jahns, T.M.; Sarlioglu, B. The Incredible Shrinking Motor Drive: Accelerating the Transition to Integrated Motor Drives. IEEE Power Electron. Mag. 2020, 7, 18–27. [Google Scholar] [CrossRef]
- Bartos, F.; Babb, M. Integrated Motor-Drive Combinations. Des. News 2001, 56, 66–70. [Google Scholar]
- Jahns, T.M.; Dai, H. The Past, Present, and Future of Power Electronics Integration Technology in Motor Drives. CPSS Trans. Power Electron. Appl. 2017, 2, 197–216. [Google Scholar] [CrossRef]
- Janjic, B.; Binder, A.; Bischof, V.; Ludwig, G. Design of PM Integrated Motor-Drive System for Axial Pumps. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; p. 621. [Google Scholar]
- Mohammed, O.A.; Ganu, S.; Liu, S.; Liu, Z.; Abed, N. Study of High Frequency Model of Permanent Magnet Motor. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; pp. 622–627. [Google Scholar]
- Lee, W.; Li, S.; Minav, T.A.; Pietola, M.; Han, D.; Sarlioglu, B. Achieving High-Performance Electrified Actuation System with Integrated Motor Drive and Wide Bandgap Power Electronics. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (epe’17 Ecce Europe), New York, NY, USA, 11–14 September 2017; pp. 1–10. [Google Scholar]
- Lee, W.; Li, S.; Han, D.; Sarlioglu, B.; Minav, T.A.; Pietola, M. A Review of Integrated Motor Drive and Wide-Bandgap Power Electronics for High-Performance Electro-Hydrostatic Actuators. IEEE Trans. Transp. Electrif. 2018, 4, 684–693. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Vansompel, H.; Sergeant, P. An Integrated Modular Motor Drive with Shared Cooling for Axial Flux Motor Drives. IEEE Trans. Ind. Electron. 2021, 68, 10467–10476. [Google Scholar] [CrossRef]
- Ghorbanian, V.; Lowther, D. Magnetic and Electrical Design Challenges of Inverter-Fed Permanent Magnet Synchronous Motors. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016; p. 1. [Google Scholar]
- Automation, R. 1329i Integrated Drive/Motor. 1999; Volume 76. Available online: https://literature.rockwellautomation.com/idc/groups/literature/documents/um/1329i-um000_-en-p.pdf (accessed on 14 August 2022).
- Leroy Somer VARMECA 30. 2013. Available online: https://www.leroy-somer.com/documentation_pdf/notices/3776k_en.pdf (accessed on 28 June 2022).
- Bean, J.C. Tesla Model 3—Wikipedia. 2017. Available online: https://en.wikipedia.org/wiki/Tesla_Model_3 (accessed on 14 August 2022).
- Wheeler, P.W.; Clare, J.C.; Apap, M.; Lampard, D.; Pickering, S.J.; Bradley, K.J.; Empringham, L. An Integrated 30kW Matrix Converter Based Induction Motor Drive. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 June 2005; pp. 2390–2395. [Google Scholar]
- Su, G.J.; Tang, L.; Ayers, C.; Wiles, R. An Inverter Packaging Scheme for an Integrated Segmented Traction Drive System. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2799–2804. [Google Scholar]
- Hennen, M.D.; Niessen, M.; Heyers, C.; Brauer, H.J.; De Doncker, R.W. Development and Control of an Integrated and Distributed Inverter for a Fault Tolerant Five-Phase Switched Reluctance Traction Drive. IEEE Trans. Power Electron 2012, 27, 547–554. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Han, Y. Evaluation and Design for an Integrated Modular Motor Drive (IMMD) with GaN Devices. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition (ecce), Denver, CO, USA, 15–19 September 2013; pp. 4318–4325. [Google Scholar]
- Shea, A.; Jahns, T.M. Hardware Integration for an Integrated Modular Motor Drive Including Distributed Control. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 4881–4887. [Google Scholar]
- Deng, X.; Lambert, S.; Mecrow, B.; Mohamed, M.A.S. Design Consideration of a High-Speed Integrated Permanent Magnet Machine and Its Drive System. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1465–1470. [Google Scholar]
- Gao, Z.; Jiang, D.; Kong, W.; Chen, C.; Fang, H.; Wang, C.; Li, D.; Zhang, Y.; Qu, R. A GaN-Based Integrated Modular Motor Drive for Open-Winding Permanent Magnet Synchronous Motor Application. In Proceedings of the 2018 1st Workshop on Wide Bandgap Power Devices and Applications in Asia (wipda Asia), Xi’an, China, 17–18 May 2018; p. 73. [Google Scholar]
- Ugur, M.; Keysan, O. Design of a GaN Based Integrated Modular Motor Drive. In Proceedings of the 2018 Xiii International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1471–1477. [Google Scholar]
- Wolmarans, J.J.; Gerber, M.B.; Polinder, H.; de Haan, S.W.H.; Ferreira, J.A.; Clarenbach, D. A 50kW Integrated Fault Tolerant Permanent Magnet Machine and Motor Drive. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 345–351. [Google Scholar]
- Mohamed, A.H.; Vansompel, H.; Sergeant, P. Design of a Circumscribing Polygon Wide Bandgap Based Integrated Modular Motor Drive Topology with Thermally Decoupled Windings and Power Converters. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. 1–9. [Google Scholar]
- Cong, Y.; Adina, N.; Wei, Z.; You, H.; Borjas, R.; Lyu, X.; Fu, P.; Hu, B.; Wang, J. Submodule Design of a 2 KV 1 MW Integrated Modular Motor Drive for Aviation Applications. In Proceedings of the 2021 IEEE 8th Workshop on Wide Bandgap Power Devices and Applications (WiPDA), Redondo Beach, CA, USA, 7–9 November 2021; pp. 345–350. [Google Scholar]
- Haghbin, S.; Khan, K.; Zhao, S.; Alakula, M.; Lundmark, S.; Carlson, O. An Integrated 20-KW Motor Drive and Isolated Battery Charger for Plug-In Vehicles. IEEE Trans. Power Electron 2013, 28, 4013–4029. [Google Scholar] [CrossRef]
- Mohammed, O.A.; Liu, S.; Liu, Z. Physical Modeling of PM Synchronous Motors for Integrated Coupling with Machine Drives. IEEE Trans. Magn. 2005, 41, 1628–1631. [Google Scholar] [CrossRef]
- Uğur, M.; Keysan, O. Multi-physics Design Optimisation of a GaN-based Integrated Modular Motor Drive System. J. Eng. 2019, 2019, 3900–3905. [Google Scholar] [CrossRef]
- Ghorbanian, V.; Hussain, S.; Hamidizadeh, S.; Chromik, R.; Lowther, D. The Role of Temperature-Dependent Material Properties in Optimizing the Design of Permanent Magnet Motors. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Tajima, G.; Hayashi, T.; Kosaka, T.; Matsui, N. Design of an Integrated Electrical Drive Using Wound Field Flux Switching Motor Coupled with Z-Source Inverter. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3934–3940. [Google Scholar]
- Verkroost, L.; Van Damme, J.; Vansompel, H.; De Belie, F.; Sergeant, P. Module Connection Topologies and Interleaving Strategies for Integrated Modular Motor Drives. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 559–564. [Google Scholar]
- Bayazit, G.H.; Ugur, M.; Keysan, O. Fault Tolerance Capabilities of Three, Four and Six-Phase Configurations of a 24 Slot Modular PMSM. In Proceedings of the 2019 IEEE 13th International Conference on Power Electronics and Drive Systems (peds), Toulouse, France, 9–12 July 2019; pp. 1–6. [Google Scholar]
- Zeng, L.; Chen, X.; Nong, X.; San, X. FE-Based Physical Model of LPMBDCM for Integrated Motor Drive System Analysis. In Proceedings of the 2008 3rd International Conference on Innovative Computing Information and Control, Dalian, China, 18–20 June 2008; p. 581. [Google Scholar]
- Boglietti, A.; Cavagnino, A.; Staton, D.; Shanel, M.; Mueller, M.; Mejuto, C. Evolution and Modern Approaches for Thermal Analysis of Electrical Machines. IEEE Trans. Ind. Electron. 2009, 56, 871–882. [Google Scholar] [CrossRef] [Green Version]
- Torres, R.A.; Dai, H.; Lee, W.; Jahns, T.M.; Sarlioglu, B. Evaluation of Sensorless Techniques for Surface Permanent-Magnet Integrated Motor Drive Using Current-Source Inverter. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 2387–2394. [Google Scholar]
- Brown, N.R.; Jahns, T.M.; Lorenz, R.D. Power Converter Design for an Integrated Modular Motor Drive. In Proceedings of the Conference Record of the 2007 IEEE Industry Applications Conference Forty-Second Ias Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; pp. 1322–1328. [Google Scholar]
- Han, P.; Heins, G.; Zhang, Y.; Ionel, D.M. Integrated Modular Motor Drives Based on Multiphase Axial-Flux PM Machines with Fractional-Slot Concentrated Windings. In Proceedings of the 2021 IEEE International Electric Machines Drives Conference (IEMDC), Hartford, CT, USA, 16–18 May 2021; pp. 1–6. [Google Scholar]
- Wu, S.; Tian, C.; Zhao, W.; Zhou, J.; Zhang, X. Design and Analysis of an Integrated Modular Motor Drive for More Electric Aircraft. IEEE Trans. Transp. Electrif. 2020, 6, 1412–1420. [Google Scholar] [CrossRef]
- Haghbin, S.; Guillen, I.S. Integrated Motor Drive and Non-Isolated Battery Charger Based on the Torque Cancelation in the Motor. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (IEEE Peds 2013), Kitakyushu, Japan, 22–25 April 2013; pp. 824–829. [Google Scholar]
- Song, Z.; Liu, C.; Liu, S.; Wang, W. Active Harmonic Suppression of Low-Reactance Multiphase Slotless Permanent Magnet Synchronous Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 1777–1787. [Google Scholar] [CrossRef]
- Klumpner, C.; Blaabjerg, F.; Thogersen, P. Evaluation of the Converter Topologies Suited for Integrated Motor Drives. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; Volume 2, pp. 890–897. [Google Scholar]
- Ugur, M.; Sarac, H.; Keysan, O. Comparison of Inverter Topologies Suited for Integrated Modular Motor Drive Applications. In Proceedings of the 2018 IEEE 18th International Power Electronics and Motion Control Conference (PEMC), Budapest, Hungary, 26–30 August 2018; pp. 524–530. [Google Scholar]
- Wheeler, P.W.; Clare, J.C.; Apap, M.; Empringham, L.; Bradley, K.J.; Pickering, S.; Lampard, D. A Fully Integrated 30 KW Motor Drive Using Matrix Converter Technology. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; p. 9. [Google Scholar]
- Davari, P.; Yang, Y.; Zare, F.; Blaabjerg, F. A Review of Electronic Inductor Technique for Power Factor Correction in Three-Phase Adjustable Speed Drives. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Park, S.; Choi, S. Soft-Switched CCM Boost Converter with High Voltage Gain for High Power Applications. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 1999–2006. [Google Scholar]
- Jiang, W.; Zhou, Y.; Chen, J. Modeling and Simulation of Boost Converter in CCM and DCM. In Proceedings of the 2009 2nd International Conference on Power Electronics and Intelligent Transportation System (PEITS), Shenzhen, China, 19–20 December 2009; Volume 3, pp. 288–291. [Google Scholar]
- Kedjar, B.; Kanaan, H.Y.; Al-Haddad, K. Vienna Rectifier with Power Quality Added Function. IEEE Trans. Ind. Electron. 2014, 61, 3847–3856. [Google Scholar] [CrossRef]
- Boillat, D.O.; Kolar, J.W. Integrated Isolation and Voltage Balancing Link of 3-Phase 3-Level PWM Rectifier and Inverter Systems. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 1073–1080. [Google Scholar]
- Abe, K.; Nishijima, K.; Harada, K.; Nakano, T.; Nabeshima, T.; Sato, T. A Novel Three-Phase Buck Converter with Bootstrap Driver Circuit. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1864–1871. [Google Scholar]
- Parkhideh, B.; Bhattacharya, S. A Practical Approach to Controlling the Back-to-Back Voltage Source Converter System. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 514–519. [Google Scholar]
- Wang, S.; Gao, H.; Afsharian, J.; Xu, D. High Frequency Bidirectional Isolated Matrix Converter for AC-Motor Drives with Model Predictive Control. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 5597–5602. [Google Scholar]
- Klumpner, C.; Blaabjerg, F. Modulation Method for a Multiple Drive System Based on a Two-Stage Direct Power Conversion Topology with Reduced Input Current Ripple. IEEE Trans. Power Electron. 2005, 20, 922–929. [Google Scholar] [CrossRef]
- Chen, H.; Wang, J.; Zhang, Z.; Zhou, L. A Review of Integrated Modular Motor Drive for Medium-Voltage Motors. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar]
- Ugur, M.; Keysan, O. DC Link Capacitor Optimization for Integrated Modular Motor Drives. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (isie), Edinburgh, UK, 19–21 June 2017; pp. 263–270. [Google Scholar]
- Amorim Torres, R.; Dai, H.; Lee, W.; Sarlioglu, B.; Jahns, T. Current-Source Inverter Integrated Motor Drives Using Dual-Gate Four-Quadrant Wide-Bandgap Power Switches. IEEE Trans. Ind. Appl. 2021, 57, 5183–5198. [Google Scholar] [CrossRef]
- Torres, R.A.; Dai, H.; Lee, W.; Jahns, T.M.; Sarlioglu, B. Current-Source Inverters for Integrated Motor Drives Using Wide-Bandgap Power Switches. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 1002–1008. [Google Scholar]
- Lee, W.; Torres, R.A.; Dai, H.; Jahns, T.M.; Sarlioglu, B. Integration and Cooling Strategies for WBG-Based Current-Source Inverters-Based Motor Drives. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 5225–5232. [Google Scholar]
- Dai, H.; Torres, R.A.; Lee, W.; Jahns, T.M.; Sarlioglu, B. Integrated Motor Drive Using Soft-Switching Current-Source Inverters with SiC- and GaN-Based Bidirectional Switches. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 2372–2378. [Google Scholar]
- Galassini, A.; Costabeber, A.; Gerada, C.; Buticchi, G.; Barater, D. A Modular Speed-Drooped System for High Reliability Integrated Modular Motor Drives. IEEE Trans. Ind. Appl. 2016, 52, 4234–4242. [Google Scholar] [CrossRef]
- Lee, H.-J.; Lim, Y.-H.; Oh, K.-K. Discussion on “A Modular Speed-Drooped System for High Reliability Integrated Modular Motor Drives”. IEEE Trans. Ind. Appl. 2018, 54, 4992–4993. [Google Scholar] [CrossRef]
- Verkroost, L.; Van Damme, J.; Bozalakov, D.V.; De Belie, F.; Sergeant, P.; Vansompel, H. Simultaneous DC-Link and Stator Current Ripple Reduction with Interleaved Carriers in Multiphase Controlled Integrated Modular Motor Drives. IEEE Trans. Ind. Electron. 2021, 68, 5616–5625. [Google Scholar] [CrossRef]
- Baburajan, S.; Wang, H.; Mandrile, F.; Yao, B.; Wang, Q.; Kumar, D.; Blaabjerg, F. Design of Common DC-Link Capacitor in Multiple-Drive System Based on Reduced DC-Link Current Harmonics Modulation. IEEE Trans. Power Electron. 2022, 37, 9703–9717. [Google Scholar] [CrossRef]
- Swanke, J.; Zeng, H.; Jahns, T.M. Modular Fault-Tolerant Machine Design with Improved Electromagnetic Isolation for Urban Air Mobility (UAM) Aircraft. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 4570–4577. [Google Scholar]
- Van Damme, J.; Verkroost, L.; Vansompel, H.; De Belie, F.; Sergeant, P. A Holistic DC Link Architecture Design Method for Multiphase Integrated Modular Motor Drives. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1593–1598. [Google Scholar]
- Hopkins, A.; Hopfensperger, B.; Mellor, P. DC-Link Capacitor Reduction in Low Voltage and High Power Integrated Modular Motor Drives. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3208–3214. [Google Scholar]
- Wattenberg, M.; Jones, E.A.; Sanchez, J. A Low-Profile GaN-Based Integrated Motor Drive for 48V FOC Applications. In Proceedings of the PCIM Europe digital days 2021; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Online, 3–7 May 2021; pp. 1–8. [Google Scholar]
- Morya, A.; Moosavi, M.; Gardner, M.C.; Toliyat, H.A. Applications of Wide Bandgap (WBG) Devices in AC Electric Drives: A Technology Status Review. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–8. [Google Scholar]
- Morya, A.K.; Gardner, M.C.; Anvari, B.; Liu, L.; Yepes, A.G.; Doval-Gandoy, J.; Toliyat, H.A. Wide Bandgap Devices in AC Electric Drives: Opportunities and Challenges. IEEE Trans. Transp. Electrif. 2019, 5, 3–20. [Google Scholar] [CrossRef]
- Khowja, M.R.; Gerada, C.; Vakil, G.; Patel, C.; Odhano, S.; Walker, A.; Wheeler, P. Novel Permanent Magnet Synchronous Motor with Integrated Filter Inductor, Using Motor’s Inherent Magnetics. IEEE Trans. Ind. Electron. 2021, 68, 5638–5649. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Lambert, S.M.; Mecrow, B.C.; Atkinson, D.J.; Smith, A.C. An Electrical Machine with Integrated Drive LCL Filter Components. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016; pp. 1–6. [Google Scholar]
- Deng, X.; Mohamed, M.A.S.; Lambert, S.; Mecrow, B. Development of a High-Speed, Permanent Magnet, SiC-Based Drive with Integrated Input Filters. IEEE Trans. Energy Convers. 2020, 35, 863–874. [Google Scholar] [CrossRef]
- Deng, X.; Lambert, S.; Mecrow, B.; Mohamed, M.A.S.; Ullah, S. Winding Connection Solution for an Integrated Synchronous Motor Drive. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar]
- Wang, C.; Li, D.; Qu, R.; Fan, X.; Kong, W.; Fang, H.; Gao, Z.; Yan, P. A Combined Thermal Analysis of an Integrated Six-Phase Motor Drive System. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ecce), Portland, OR, USA, 23–27 September 2018; pp. 4323–4328. [Google Scholar]
- Farina, F.; Rossi, D.; Tenconi, A.; Profumo, F.; Bauer, S.E. Thermal Design of Integrated Motor Drives for Traction Applications. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; p. 10. [Google Scholar]
- Tenconi, A.; Profumo, F.; Gallo, D.; Hennen, M.D.; Bauer, S.E. Temperatures Evaluation in an Integrated Motor Drive for Traction Applications. In Proceedings of the IECON 2006–32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; p. 4770. [Google Scholar]
- Mohamed, A.H.; Vansompel, H.; Sergeant, P. Polygon Retrofitted Integrated Modular Motor Drive for Switched Reluctance Machines. IEEE Trans. Ind. Electron. 2021, 69, 12469–12479. [Google Scholar] [CrossRef]
- Pickering, S.; Wheeler, P.; Thovex, F.; Bradley, K. Thermal Design of an Integrated Motor Drive. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 7–10 November 2006; pp. 4794–4799. [Google Scholar]
- Lee, W.; Sarlioglu, B. Thermal Analysis of Lateral GaN HEMT Devices for High Power Density Integrated Motor Drives Considering the Effect of PCB Layout and Parasitic Parameters. In Proceedings of the 2018 IEEE Transportation and Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 471–476. [Google Scholar]
- Torres, R.A.; Dai, H.; Jahns, T.M.; Sarlioglu, B.; Lee, W. Cooling Design of Integrated Motor Drives Using Analytical Thermal Model, Finite Element Analysis, and Computational Fluid Dynamics. In Proceedings of the 2021 IEEE Applied Power Electronics Conference and Exposition (APEC), Phoenix, AZ, USA, 9–13 June 2021; p. 1509. [Google Scholar]
- Mohamed, A.H.; Vansompel, H.; Sergeant, P. Electrothermal Design of a Discrete GaN-Based Converter for Integrated Modular Motor Drives. IEEE J. Emerg. Sel. Topics Power Electron. 2021, 9, 5390–5406. [Google Scholar] [CrossRef]
- Song, Z.; Huang, R.; Wang, W.; Liu, S.; Liu, C. An Improved Dual Iterative Transient Thermal Network Model for PMSM with Natural Air Cooling. IEEE Trans. Energy Convers. 2022. [Google Scholar] [CrossRef]
- Ektesabi, M.; Felic, H. Controlling Heat, Vibration and EMI in an Integral Motor. In Proceedings of the 2007 Compatibility in Power Electronics, Gdansk, Poland, 29 May–1 June 2007; p. 281. [Google Scholar]
- Chen, T.; Caicedo-Narvaez, C.; Wang, H.; Moallem, M.; Fahimi, B.; Kiani, M. Electromagnetic Compatibility Analysis of an Induction Motor Drive with Integrated Power Converter. IEEE Trans. Magn. 2020, 56, 1–4. [Google Scholar] [CrossRef]
- Huang, D.; Fang, S.; Pan, Z.; Wang, Y. Low Speed Model Predictive Control Based on Modified Extended State Observer of Arc Motor. IEEE Trans. Ind. Electron. 2022, 1–11. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, Q.; Wang, W.; Zhou, X. Speed Regulation System of a Flux-Modulated Permanent-Magnet In-Wheel Motor Based on Sliding Mode Control and Adaptive Notch Filter. IEEE Trans. Energy Convers 2018, 4, 2183–2190. [Google Scholar] [CrossRef]
- Song, Z.; Liu, C.; Chen, Y.; Huang, R. Air-Gap Permeance and Reluctance Network Models for Analyzing Vibrational Exciting Force of In-Wheel PMSM. IEEE Trans. Veh. Technol. 2022, 71, 7122–7133. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Huang, Y.; Xiao, Y. Direct Modulation Pattern Control for Dual Three-Phase PMSM Drive System. IEEE Trans. Ind. Electron. 2022, 69, 110–120. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Song, Z.; Dong, Z.; Huang, Y. Candidate Modulation Patterns Solution for Five-Phase PMSM Drive System. IEEE Trans. Transp. Electrif. 2022, 8, 1194–1208. [Google Scholar] [CrossRef]
- Liu, S.; Song, Z.; Dong, Z.; Liu, Y.; Liu, C. Generic Carrier-Based PWM Solution for Series-End Winding PMSM Traction System with Adaptative Overmodulation Scheme. IEEE Trans. Transp. Electrif. 2022. [Google Scholar] [CrossRef]
- Dong, Z.; Liu, C.; Song, Z.; Liu, S. Suppression of Dual-Harmonic Components for Five-Phase Series-Winding PMSM. IEEE Trans. Transp. Electrif. 2022, 8, 121–134. [Google Scholar] [CrossRef]
- Guo, Q.; Dong, Z.; Liu, H.; You, X. Nonlinear Characteristics Compensation of Inverter for Low-Voltage Delta-Connected Induction Motor. Energies 2020, 13, 590. [Google Scholar] [CrossRef] [Green Version]
- Dong, Z.; Liu, C.; Liu, S.; Song, Z. Deadbeat Predictive Current Control for Series-Winding PMSM Drive with Half-Bridge Power Module-Based Inverter. Energies 2021, 14, 4620. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Generic Predictive Model Calibration for PMSMs with Different Topologies. Green Energy Intell. Transp. 2022, 1, 100015. [Google Scholar] [CrossRef]
- Dai, H.; Jahns, T.M.; Torres, R.A.; Liu, M.; Sarlioglu, B.; Chang, S. Development of High-Frequency WBG Power Modules with Reverse-Voltage-Blocking Capability for an Integrated Motor Drive Using a Current-Source Inverter. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 1808–1815. [Google Scholar]
- Wang, W.; Fan, Y.; Chen, S.; Zhang, Q. Finite control set model predictive current control of a five-phase PMSM with virtual voltage vectors and adaptive control set. CES Trans. Electr. Mach. Syst. 2018, 2, 136–141. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, J.; Zhang, B.; Jiang, X.; Kang, Z.; Ni, T.; Li, W. TCM controller design for three-level bidirectional soft-switching dc-dc converter. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 996–1001. [Google Scholar]
- Huang, R.; Song, Z.; Zhao, H.; Liu, C. Overview of Axial-Flux Machines and Modeling Methods. IEEE Trans. Transp. Electrif. 2022, 8, 2118–2132. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, C.; Gao, X.; Liu, S. Design and Control of a Decoupled Multichannel Wireless Power Transfer System Based on Multilevel Inverters. IEEE Trans. Power Electron. 2022, 37, 10045–10060. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, C.; Huang, Y. Wireless Power Transfer for Implanted Medical Application: A Review. Energies 2020, 13, 2837. [Google Scholar] [CrossRef]
- Gao, X.; Liu, C.; Zhou, H.; Hu, W.; Huang, Y.; Xiao, Y.; Lei, Z.; Chen, J. Design and Analysis of a New Hybrid Wireless Power Transfer System with a Space-Saving Coupler Structure. IEEE Trans. Power Electron. 2020, 36, 5069–5081. [Google Scholar] [CrossRef]
- Kaczmarczyk, Z.; Kasprzak, M.; Ruszczyk, A.; Sowa, K.; Zimoch, P.; Przybyla, K.; Kierepka, K. Inductive Power Transfer Subsystem for Integrated Motor Drive. Energies 2021, 14, 1412. [Google Scholar] [CrossRef]
- Wang, H.; Chau, K.T.; Lee, C.H.; Tian, X. Design and Analysis of Wireless Resolver for Wireless Switched Reluctance Motors. IEEE Trans. Ind. Electron. 2022. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Hua, Z.; Pang, H. An integrated wireless motor system using laminated magnetic coupler and commutative-resonant control. IEEE Trans. Ind. Electron. 2021, 69, 4342–4352. [Google Scholar] [CrossRef]
- Babaki, A.; Vaez-Zadeh, S.; Zakerian, A.; Natanzi, A.J. Analysis and control of wireless motor drives with a single inverter in primary side. IEEE Trans. Energy Convers. 2021, 36, 930–939. [Google Scholar] [CrossRef]
- Huang, R.; Liu, C.; Song, Z.; Zhao, H. Design and Analysis of a Novel Axial-Radial Flux Permanent Magnet Machine with Halbach-Array Permanent Magnets. Energies 2021, 14, 3639. [Google Scholar] [CrossRef]
- Sadik, D.P.; Colmenares, J.; Tolstoy, G.; Peftitsis, D.; Bakowski, M.; Rabkowski, J.; Nee, H.P. Short-circuit protection circuits for silicon-carbide power transistors. IEEE Trans. Ind. Electron. 2015, 63, 1995–2004. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMDs Types | 1st IMDs | 2nd IMDs | IMMDs |
|---|---|---|---|
| Advantages of different IMDs types | •Simple Structure and Low Cost •No need to redesign the motor | •Small size •High integration | •Low manufacturing and maintenance costs •Easy to manufacture and assemble •Long service life |
| Disadvantages of different IMDs types | •Limited volume optimization •Increased motor height or length •Low energy density | •Complex design •Increased manufacturing costs | •Complex design •Heat dissipation and EMI issues need to be addressed |
| IMDs Common Advantages | •Small volume •High power density •Reduced cable usage •Low losses •Easy to use •Better water resistance | ||
| IMDs Common Disadvantages | •Complex design •Heat dissipation and EMI issues •DC-link capacitor volume affects motor volume optimization | ||
| Motor | Manufacturer /Designer | Motor Type | Converter Position | WB 10 | Year | Maximum Speed | Power | Input Voltage | Others |
|---|---|---|---|---|---|---|---|---|---|
| Allen-Bradley 1329I [20] | Rockwell | 3-phase IM 1 | RHM 6 | No | 1999 | 1800 rpm | 3.7 kW | 460 V | N/A |
| Varmeca 30 [21] | Leroy-Somer | 3-phase IM | RHM | No | 2013 | 3000 rpm | 0.25–11 kW | 400/480 V | N/A |
| Tesla Model 3 [22] | Tesla | PMSM | AHM 7 | Yes | 2021 | 19,000 rpm | 202 kW | 345 V DC | System 2.2 kW/kg |
| Matrix Converter IMD [23] | P. W. Wheeler | 3-phase IM | ASM | No | 2005 | N/A | 30 kW | 415 V | N/A |
| Segment Inverter IMD [24] | Gui Jia Su | 3-phase IM | AHM | No | 2013 | 1200 rpm | 55 kW | 230 V(Test) | 15.6 kW/kg |
| 5-Phase Integrated SRM [25] | Martin D.H. | 5-phase SRM 2 | ASM 8 | No | 2012 | 750 rpm | 67 kW | 400 V DC | N/A |
| Gan IMMD1 [26] | Jiyao Wang | 3-phase IM | ASM | Yes | 2015 | N/A | 1 kW | 200 V | Module Design |
| SPM IMMD [27] | Adam Shea | 6-phase SPM 3 | ASM | No | 2014 | 2400 rpm | 18 kW | 325 V DC | Module Design |
| SIC IMD [28] | Xu Deng | PM 4 | ASM | Yes | 2018 | 25,000 rpm | 34 kW | 750 V DC | Integrated LCL |
| PMSM IMMD [29] | Zihan Gao | 6-phase PMSM 5 | ASM | Yes | 2018 | 1500 rpm | 1.9 kW | 14.5 V | Module Design |
| Gan IMMD2 [30] | M. Uğur | PMSM | ASM | Yes | 2018 | 600 rpm | 8 kW | 540 V DC | 1.1 kW/lt |
| SPM IMD [31] | J.J. Wolmarans | 6-phase SPM | RSM 9 | No | 2008 | N/A | 50 kW | 270 V DC | 2 kW/kg |
| Axial Flux IMMD [32] | Abdalla Hussein Mohamed | PMSM | RSM | Yes | 2020 | 2500 rpm | 4 kW | 400 V DC | Module Design |
| Aviation IMMD [33] | Yizhou Cong | N/A | RSM | Yes | 2021 | N/A | 1 MW | 2 kV | 35.36 kW/kg |
| Quantitative Indicators of Integration Level | Quantification Methods | Others |
|---|---|---|
| Motor Power | is the given reference motor power value, e.g., its value can be specified as 7.5 kW. | |
| Motor Volume V | is the value of the given reference motor volume. | |
| Converter Integration Position Ec | The Quantification needs to be based on engineering or expert experience and can be given in steps of 0.1 with a quantification range of [0, 1]. | Take Ec as an example: The quantized value of the motor with a non-integrated design is 0. The converter position is RHM of 0.2 and AHM is 0.3, and ASM and RSM are 0.6. If the size of the motor does not increase with the integrated converter, the quantization score will increase. The quantization is based on the actual motor design. |
| Integrated Thermal Design | ||
| Converter LC device Volume Optimization | ||
| Wide-band Device Applications | ||
| Modular Design |
| Converter Position | Characteristics | Advantages | Disadvantages |
|---|---|---|---|
| RHM | •Early designs •Motor housing with converter housing mounted on the outside | •Simple design •No thermal coupling of the motor to the converter •No unique design for motor housing •Low cost and easy to maintain | •Large volume •Low power density •Vibration problems •Poor performance of high-speed motors |
| AHM | |||
| RSM | •The converter is integrated into the motor | •Shared heat sink •High heat dissipation efficiency •Smaller size •High power density •High level of integration | •High maintenance costs •Motor housing may require unique design and cost increase •Complex design •Overall consideration of heat dissipation and EMI |
| ASM |
| Classification | ASD Types | Advantages | Disadvantages |
|---|---|---|---|
| ASD Topologies with Square-Wave Input Current | Electronic Inductor [52] | •Reduced THD of input current •Greater robustness •Lower cost | •Low voltage transfer ratio •Higher inductance |
| CCM Boost Converter [53] | |||
| ASD Topologies with Sinusoidal Input Current | DCM Boost Converter [54] | •Better waveform •Smaller inductance •Better quality of input current | •High losses •High voltage ripple |
| Vienna Rectifier [55] | |||
| 3-level PWM Rectifiers [56] | |||
| 3-phase Buck Converters [57] | |||
| Regenerative ASD Topologies with Sinusoidal Input Current | The back-to-back VSR [58] | •Low conduction losses •Matrix converters do not require DC-link capacitors •Better economy | •High switching losses •Complex control •Low voltage transfer ratio of matrix controller, poor resistance to grid interference. |
| The Matrix Converter [59] | |||
| DPC [60] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Song, Z.; Liu, S.; Huang, R.; Liu, C. Overview of Integrated Electric Motor Drives: Opportunities and Challenges. Energies 2022, 15, 8299. https://doi.org/10.3390/en15218299
Zhang B, Song Z, Liu S, Huang R, Liu C. Overview of Integrated Electric Motor Drives: Opportunities and Challenges. Energies. 2022; 15(21):8299. https://doi.org/10.3390/en15218299
Chicago/Turabian StyleZhang, Bowen, Zaixin Song, Senyi Liu, Rundong Huang, and Chunhua Liu. 2022. "Overview of Integrated Electric Motor Drives: Opportunities and Challenges" Energies 15, no. 21: 8299. https://doi.org/10.3390/en15218299
APA StyleZhang, B., Song, Z., Liu, S., Huang, R., & Liu, C. (2022). Overview of Integrated Electric Motor Drives: Opportunities and Challenges. Energies, 15(21), 8299. https://doi.org/10.3390/en15218299