
A Comprehensive Review of Conventional and Intelligence-Based Approaches for the Fault Diagnosis and Condition Monitoring of Induction Motors

 , ,
, ,
Abstract
:1. Introduction
- to obtain an idea on the evolution of the fault and predict their level of severity to ensure till when a regular operation of the motor is maintained;
- to quantify the impact of the fault onto the motor behavior and interpret the signatures to understand the cause of failure (a posteriori). Thus, based on these factors, it is essential that FD and CM be carried out to ensure high reliability of the IMs and avoid losses to the industry in monetary and non-monetary terms.
2. Rotating Machinery Fault Statistics
- Rotor mechanical faults, e.g., bearing faults, eccentricity, bent shaft, and misalignment;
- Stator faults, which can be recorded as a stator open phase, stator unbalance (because of short circuits), or expanded resistance connections;
- Rotor electrical issues which include rotor open phase, rotor unbalance (because of short circuits), expanded resistance connections for wound rotor machines and broken bar(s) or a split-end ring design for squirrel-cage IMs, and rotor magnetic flaws such as demagnetization;
- The failure of one or more power electronic components of the drive framework. IMs are symmetrical electric systems in view of the rotating magnetic field, so any sort of deficiency can change their symmetrical properties. Mainly all the electrical deficiencies that happen in the rotor impacts include a dissymmetry of the rotor circuits, both for the wounded IMs (dissymmetry of the windings impedances) and for the squirrel-cage IMs (broken bars or split-end ring designs).
3. Conventional Approaches for FD and CM
- A sensing task (primary variable);
- A data acquisition task (digitizing analogue data for processing);
- A data processing task (information identification);
- A diagnostic task (reasoning and taking action from the processed data).
- Vibration analysis—To begin with, the primary sources of vibration in IMs are: (a) the response of the stator end windings to the emf generated on the conductors, (b) the dynamic behavior of rotor in the bearings as the IM rotates, (c) the response of the shaft bearing onto the support structure of the IM, and (d) the response of the stator core to the attractive force developed magnetically between the stator and the rotor [22]. Under this variety of occurrences, the mechanical component of the IM is immensely affected. Hence, through vibration analysis, the following faults can be identified: rotor eccentricity, unbalanced rotor faults, bearing faults, and gear-based faults. Under vibration analysis, the data essential for the identification are the oscillation force that is imparted by the IM, and it is directly proportional to the acceleration of vibration. Usually, piezo-electric sensors are deployed for fault detection in small motors, which work based on piezoelectric effect to generate electricity from mechanical stress. In addition, micro-electro-mechanical system (MEMS) accelerometers have also been used to acquire vibration data for fault detection and diagnosis in IMs [23], particularly for rotor bar faults. Through signal processing, vibration-based data are analyzed, and with the mathematical model of the IM, anomalies are detected. See survey for the FD and CM of rotating machinery using vibration analysis in [23,24,25,26,27].
- Partial discharge analysis: This type of analysis is usually carried out to test the winding insulation in high-voltage systems. Small electrical discharge occurs as a result of insulation degradation; this is referred to as “partial discharge”. The parts in IMs which are mostly affected by the discharge activity are (a) the stator slot wall, where these phenomena can erode and affect the main wall insulation; (b) where coils emerge from the earth protection of the slot so that the insulation system is exposed to the surface discharge; (c) the end winding surface—at phase separation regions, whereby the surface is immensely affected, usually in the presence of dirt or moisture [22]. In general, the degraded winding insulation may have over 30 times the partial discharge activity than a normal one [28]. In a high-voltage machine, partial discharge analysis can identify the degradation before complete failure. This technique has been used extensively in high-power industries, and its reliability has been verified by [29]. A specialized piece of equipment, the partial discharge analyzer (PDA) is usually used to monitor the partial discharge in windings on an online basis [30]. Interesting studies related to PDA for stator winding insulation and recent advances in this area are highlighted in [31,32].
- Induced voltage analysis: The fault can be identified by analyzing the induced voltage along the shaft of an IM. This induced voltage mainly occurs due to the degradation of the insulation winding (stator). A major drawback of this type approach is that very small to negligible voltage readings are given at the incipient stage of the insulation failure. The adequate amount of information in terms of voltage readings is given only when a significant amount of damage has already been inflicted upon the insulation windings [33]. Due to these reasons, this technique is not so common nowadays.
- Torque analysis: Due to its symmetric construction, faults in the IM produce harmonics at particular frequencies in the air gap. Unfortunately, this air-gap torque cannot be measured directly and requires electrical quantities which are measurable (especially the motor terminal parameters). As an alternative to MCSA, authors of [34] have proposed load torque signature analysis (LTSA) in their work. On the other hand, reference [35] utilized the air-gap profile to discriminate faulty signatures from healthy where the torque normalization method has been used in conjunction with voltage and current measurements. The researchers have concluded that diagnosis entirely depends on the size and the rating of the IM investigated as the majority of studies [34,35] investigate the torque-speed characteristic curve to identify asymmetries in terms of stator- and rotor-related faults.
- Acoustic analysis: This type of analysis entirely relies on the acoustic noise spectrum generated by the IM. Straightforward spectral analysis is carried out and compared with respect to the healthy signature for fault detection. Common faults analyzed using acoustic analysis are: bearing faults, air-gap eccentricity faults, and gearbox faults. In [36,37], some studies state that this type of analysis is instrumental for the early detection of the incipient faults, while some studies [38,39] utilize this approach for gearbox FD which is a recent trend. The major drawback of these techniques is that under a noisy environment, this approach may be impractical due to noise interaction from other sources (working machines, etc.) [35].
- Chemical analysis: This analysis is one of the most effective but is an invasive technique used to monitor the health of IMs. In general, for IMs, the lubricants are subject to chemical analysis, mostly to determine the wear of the bearings. By taking the sample of the lubricant and performing X-Ray analysis, the deposits which chemically attack the bearings can be identified. This is because the lubricants usually not only carry products of their own but also contain the byproducts of the wear of the bearings and seals. With time and being subject to various environments (heat, cool, vibration, etc.), the quality of the lubricants can decrease, resulting in the degradation of bearings [20,22] due to presence of metal filling in the bearing (which rotate and damage the other ball bearings). In addition, the degradation of the insulation material in the IM can also chemically attack the parts which are vulnerable, such as winding insulation [22]. However, it should be noted that for this type of analysis, the detectability criteria are application-based, and tests are only feasible for large machines [40].
- Thermal analysis: With this method, the detection of bearing and stator inter-turn faults is possible in IMs. Usually, the change in temperature of the IM reveals a lot of information on its performance by merely comparing the heat signature of the IM when it usually operates. The bearing fault via thermal analysis is detected because of the increase in the friction coefficient upon operation, which in turn increases the temperature of the IM. In terms of inter-turn faults, the temperature rises till the IM is affected. This can be visualized by means of thermal camera. While this type of fault can take time, thermal monitoring can reveal the cutoff regions to raise an alarm for the inter-turn fault. Most model-based studies have thermally modelled the IMs. They have been performed in two ways: (a) a lumped parameter thermal model and (b) a finite element analysis model [41]. Refs. [42,43] give an overview of recent thermal-based analysis for FD and CM in electrical machines.
- Current analysis: With this technique, stator currents for the IMs are monitored. This is a non-invasive technique, whereby the stator current is measured by using Hall-effect current sensors. While a current transformer coil can be used, its readings are unreliable for low-frequency measurements. For analyses described in i–vii above, it is mandatory to deploy an additional sensor to acquire the parameters of interest. This requires additional work to be carried out when it comes to mounting the transducers. To some extent, this may affect the normal operation of the IM as well as being expensive when it comes to cost factor. On the other hand, acquiring stator currents without an extra device is feasible since the current transducers are already installed in the system which are responsible for the protection of the IM and its control mechanisms. In this regard, MCSA or current signature analysis (CSA) can be used as the sensor-less fault detection method which can be implemented without additional hardware. MCSA or CSA is achievable on an online basis, meaning current spectra can be acquired and analyzed while the IM is running. Most recent studies in the field of IM FD utilize MCSA or CSA as the base technique [3,5,17,44,45].
- Data acquisition: the three-phase stator currents of the IM are measured by means of current transducers, which are identical for all the phases. The acquisition is completed for both transient and steady states under various loading conditions.
- Data pre-processing/signal conditioning: in this step, the digitized signal is further conditioned to remove noise components with filtering techniques. Thereafter, the signal is stored for further analysis including feature calculation.
- Feature calculation: in the third step of MCSA/CSA, the calculation of the most notable features is made, which involves digital signal-processing techniques (DSPTs) [46]. Under the DSPTs, time-, frequency-, and time–frequency-based techniques are utilized. Based on the above DSPTs, the focus is on identifying and separating the constituents of the spectrum obtained upon data acquisition. Not only are the DSPTs utilized under this process, but also other state-of-the-art techniques such as neural networks, fuzzy and neuro-fuzzy, etc., are used in order to calculate the features. In a nutshell, MCSA/CSA is mostly used to identify the characteristic fault frequency component in the spectra, which may arise due to an anomaly in the investigated motor. It should be remarked that for each type of fault incurred, a unique fault frequency may spike up, indicating the nature of the fault. In some studies, the severity of the incurred fault from the frequency spectra can also be determined [47,48].
- Fault assessment: in this step, after the detection of the fault, its severity and nature are determined by either the DSPTs [46] or pattern recognition techniques [49]. Usually, the severity factor and class of the fault are deduced by comparing them with the healthy stator current signature. Recent trends in the area of FD and CM involve artificial intelligence (AI)-based techniques mainly used for classifying and deducing fault severity, as per studies in [47,48].
4. Fault Monitoring and Diagnosis Framework
4.1. Model-Based Approaches
4.1.1. Physical-Model-Based Approaches
4.1.2. State Estimation Techniques
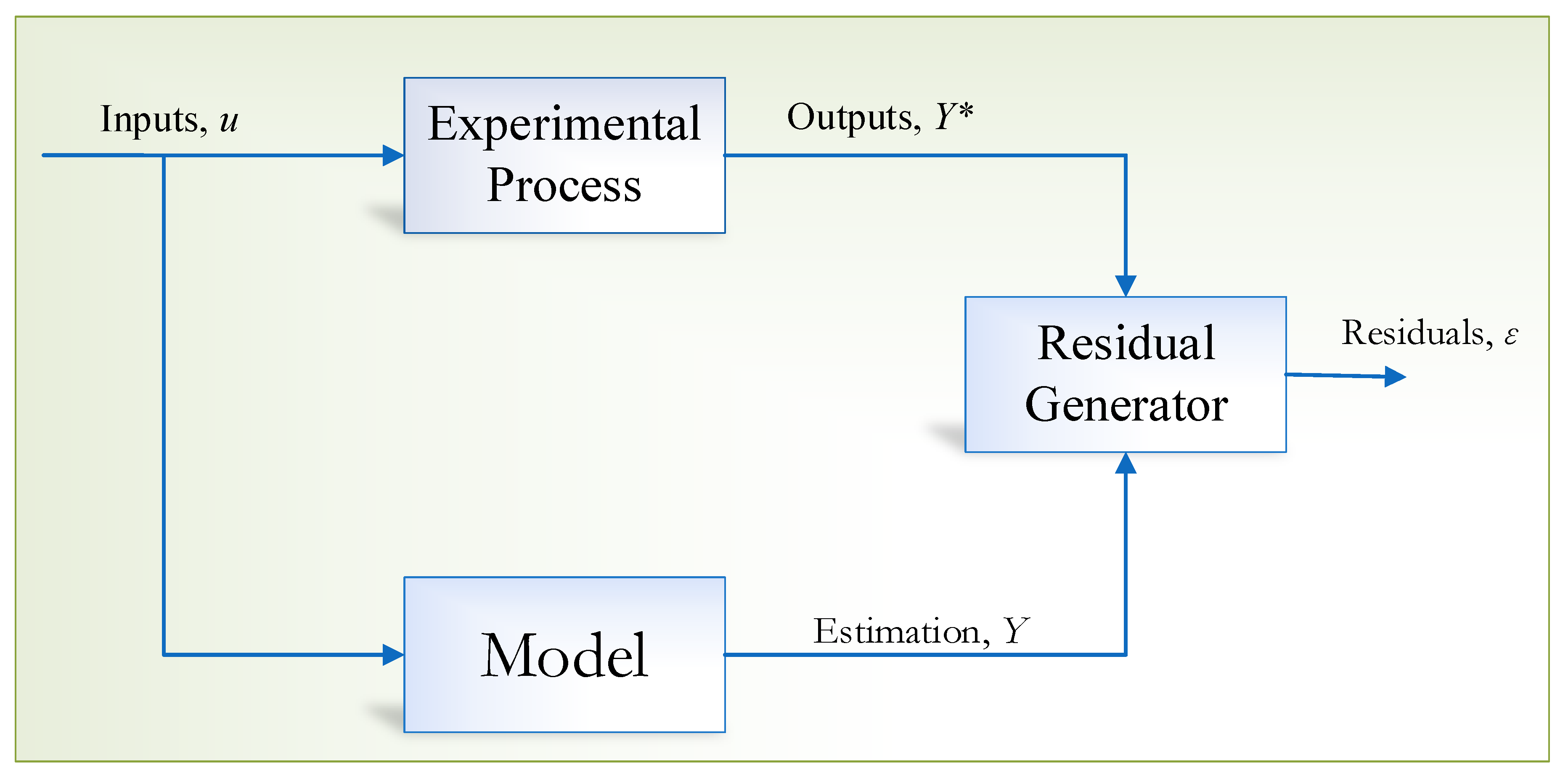
4.1.3. Residual Generation Techniques
4.1.4. Identification Techniques
4.1.5. Finite Element Method
- the non-linearity of silicon steel materials;
- the non-sinusoidal distribution of the windings and rotor bars;
- accuracy in material modelling;
- structural deformation.
4.2. Signal-Based Approach
- spectral analysis;
- spectrogram;
- temporal analysis;
- via Wigner–Ville distribution [98].
Advances in Signal Processing for FD of IM-MCSA
5. Orientation towards Modern Techniques for FD
5.1. Data-Based Approach and Its Transition
- statistical and probability theory;
- data pre-processing;
- feature engineering;
- dimensionality reduction;
- classification (supervised or unsupervised).
5.2. Data-Driven ML-Based Approach
- Supervised classification: under this class, the input data and its corresponding labels are provided. In this way, the algorithm can learn the patterns, so as to isolate the healthy and faulty conditions of electrical drives. The raw data acquired from sensors are subject to signal conditioning and feature calculation, which results in the creation of successful classifiers after adequate training for real-time diagnosis.
- Unsupervised classification: under this class, the data have no predefined class label. In this procedure, the algorithm can automatically organize the data after some parameter tuning and finally assign clusters to each group with similar patterns. Under this scheme, various clustering algorithms can be used.
6. The Amalgamation of Model, Signal, and Data-Based Techniques for the Diagnosis of IMs
7. Intelligent Approaches for FD
7.1. Overview of Intelligent Architectures in FD
7.1.1. Recent Advances in FD for IMs via Intelligent Techniques
- Feature engineering—derives appropriate condition indicators of the machine in question and correlate the changes with respect to the healthy conditions of the motor. This can be achieved by employing DSPTs and other conventional methods, and requires domain expertise. Studies show that it is possible to use deep learning, especially that implemented with convolutional neural networks (CNNs), to combine the feature engineering and feature extraction parts [38,117]; however, extensive data and fine-tuning are required to achieve better results. While it may be cumbersome to try out various new architectures for the diagnosis of IMs involving CNNs, deep learning is still a promising approach and should be explored more in detail.
- Feature extraction and dimensionality reduction—since feature extraction methods and the dimensionality reduction (DR) are complementary, both of them can be exploited under the diagnostic framework. The term feature extraction means extracting significant or noteworthy features from the previous feature engineering step. The method of extraction may vary and would involve specific feature ranking techniques to demonstrate the variability of each engineered feature. On the other hand, the term DR refers to a reduction in the feature set (FS). The DR is an essential step in ML, since the resulting FS reduction simplifies the classification and reduces the training time and other time complexities. Unlike other ranking-based feature extraction techniques, which tend to reduce the importance of the bottom-ranked features, the DR can reduce the dimensionality of the FS while preserving the contribution of all the features. Various studies in relation to the topology or geometry-preserving DR techniques have been explored by researchers in [38,47,48].
- Classification—in this step, pattern recognition techniques are employed after the feature engineering, feature extraction, and DR steps. The FS is made a classifier compliant (i.e., it is ready to be used for classification) and then it is statistically normalized before training. The objective of classification is to discriminate the signals given by the real physical machine based on the historical data. The classification is performed either in a supervised or in an unsupervised way; moreover, the classification requires a considerable prior assessment of the statistical validity of the FS. The FS is assumed to be studied in terms of geometry, topology, and variability of the data, so that proper preprocessing can be made. While many studies do not address this aspect, they end up using large classification architectures just to achieve higher accuracies. On the other hand, using the above systematic way of preprocessing the FS, simple classification tools can be proposed to achieve relatively high values of accuracy with a lower time complexity and simple architecture.
7.1.2. Feature Engineering
- the harmonic component of interest is very close to the fundamental frequency component;
- some information is lost due to filtering.
7.1.3. Dimensionality Reduction Techniques
7.1.4. Classification
7.1.5. Diagnosis of Bearing and Gear-Based Faults
7.1.6. Diagnosis of Stator Faults
7.1.7. Diagnosis of Rotor Faults
7.1.8. Diagnosis under Non-Stationary Conditions
8. Open Problems and Final Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Senanayaka, J.S.L.; Kandukuri, S.T.; Van Khang, H.; Robbersmyr, K.G. Early detection and classification of bearing faults using support vector machine algorithm. In Proceedings of the 2017 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Nottingham, UK, 20–21 April 2017; pp. 250–255. [Google Scholar]
- Choqueuse, V.; Benbouzid, M. Induction machine diagnosis using stator current advanced signal processing. Int. J. Energy Convers. 2015, 3, 76–87. [Google Scholar]
- Henao, H.; Capolino, G.-A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines: A review of diagnostic techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Filippetti, F.; Bellini, A.; Capolino, G.-A. Condition monitoring and diagnosis of rotor faults in induction machines: State of art and future perspectives. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013. [Google Scholar]
- Toliyat, H.A.; Nandi, S.; Choi, S.; Meshgin-Kelk, H. Electric Machines: Modeling, Condition Monitoring, and Fault Diagnosis; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- 493-2007; IEEE Recommended Practice for the Design of Reliable Industrial and Commercial Power Systems—Redline. IEEE: New York, NY, USA, 2007.
- Singh, G. Induction machine drive condition monitoring and diagnostic research—A survey. Electr. Power Syst. Res. 2003, 64, 145–158. [Google Scholar] [CrossRef]
- Zhang, P.; Du, Y.; Habetler, T.G.; Lu, B. A survey of condition monitoring and protection methods for medium-voltage induction motors. IEEE Trans. Ind. Appl. 2010, 47, 34–46. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H. A review of induction motors signature analysis as a medium for faults detection. IEEE Trans. Ind. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef] [Green Version]
- Kliman, G.B.; Koegl, R.A.; Stein, J.; Endicott, R.D.; Madden, M.W. Noninvasive detection of broken rotor bars in operating induction motors. IEEE Trans. Energy Convers. 1988, 3, 873–879. [Google Scholar] [CrossRef] [PubMed]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors-a review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Siddique, A.; Yadava, G.; Singh, B. A review of stator fault monitoring techniques of induction motors. IEEE Trans. Energy Convers. 2005, 20, 106–114. [Google Scholar] [CrossRef]
- Zhongming, Y.; Bin, W. A review on induction motor online fault diagnosis. In Proceedings of the IPEMC 2000—Third International Power Electronics and Motion Control Conference, Beijing, China, 15–18 August 2000; pp. 1353–1358. [Google Scholar]
- Group, M.R.W. Report of large motor reliability survey of industrial and commercial installations, Part I. IEEE Trans. Ind. Appl. 1985, 1, 865–872. [Google Scholar]
- Bonnett, A.H. Root cause AC motor failure analysis with a focus on shaft failures. IEEE Trans. Ind. Appl. 2000, 36, 1435–1448. [Google Scholar] [CrossRef] [Green Version]
- Haji, M.; Toliyat, H.A. Pattern recognition-a technique for induction machines rotor broken bar detection. IEEE Trans. Energy Convers. 2001, 16, 312–317. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Tassoni, C.; Capolino, G.-A. Advances in diagnostic techniques for induction machines. IEEE Trans. Ind. Electron. 2008, 12, 4109–4126. [Google Scholar] [CrossRef]
- Soualhi, A.; Medjaher, K.; Zerhouni, N. Bearing health monitoring based on Hilbert–Huang transform, support vector machine, and regression. IEEE Trans. Instrum. Meas. 2014, 64, 52–62. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Perez, A.; de Jesus Romero-Troncoso, R.; Cabal-Yepez, E.; Osornio-Rios, R.A. The application of high-resolution spectral analysis for identifying multiple combined faults in induction motors. IEEE Trans. Ind. Electron. 2011, 58, 2002–2010. [Google Scholar] [CrossRef]
- Karmakar, S.; Chattopadhyay, S.; Mitra, M.; Sengupta, S. Induction Motor Fault Diagnosis; Springer: Berlin/Heidelberg, Germany, 2016; Volume 25. [Google Scholar]
- Thorsen, O.V.; Dalva, M. Failure identification and analysis for high-voltage induction motors in the petrochemical industry. IEEE Trans. Ind. Appl. 1999, 35, 810–818. [Google Scholar] [CrossRef]
- Tavner, P.; Ran, L.; Penman, J.; Sedding, H. Condition Monitoring of Rotating Electrical Machines; IET: London, UK, 2008; Volume 56. [Google Scholar]
- Maruthi, G.; Hegde, V. An experimental investigation on broken rotor bar in three phase induction motor by vibration signature analysis using MEMS accelerometer. Int. J. Emerg. Technol. Adv. Eng. 2013, 3, 357–363. [Google Scholar]
- Su, H.; Chong, K.T.; Kumar, R.R. Vibration signal analysis for electrical fault detection of induction machine using neural networks. Neural Comput. Appl. 2011, 20, 183–194. [Google Scholar] [CrossRef]
- McInerny, S.A.; Dai, Y. Basic vibration signal processing for bearing fault detection. IEEE Trans. Educ. 2003, 46, 149–156. [Google Scholar] [CrossRef]
- Li, W.; Mechefske, C.K. Induction motor fault detection using vibration and stator current methods. Insight-Non-Destr. Test. Cond. Monit. 2004, 46, 473–478. [Google Scholar] [CrossRef]
- Tiboni, M.; Remino, C.; Bussola, R.; Amici, C. A Review on Vibration-Based Condition Monitoring of Rotating Machinery. Appl. Sci. 2022, 12, 972. [Google Scholar] [CrossRef]
- Bonnett, A.H.; Soukup, G.C. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937. [Google Scholar] [CrossRef]
- Stone, G.C.; Sedding, H.G.; Costello, M.J. Application of partial discharge testing to motor and generator stator winding maintenance. IEEE Trans. Ind. Appl. 1996, 32, 459–464. [Google Scholar] [CrossRef]
- Tetrault, S.M.; Stone, G.C.; Sedding, H.G. Monitoring partial discharges on 4-kV motor windings. IEEE Trans. Ind. Appl. 1999, 35, 682–688. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.; Jeong, J.; Lee, K.; Lee, S.B.; Stone, G.C. Inverter-Embedded Partial Discharge Testing for Reliability Enhancement of Stator Winding Insulation in Low Voltage Machines. IEEE Trans. Ind. Appl. 2022, 58, 2088–2096. [Google Scholar] [CrossRef]
- Selema, A.; Ibrahim, M.N.; Sergeant, P. Electrical Machines Winding Technology: Latest Advancements for Transportation Electrification. Machines 2022, 10, 563. [Google Scholar] [CrossRef]
- Tavner, P.; Gaydon, B.; Ward, D. Monitoring generators and large motors. In IEE Proceedings B (Electric Power Applications); IET Digital Library: London, UK, 1986; pp. 169–180. [Google Scholar]
- Stopa, M.M.; de Jesus Cardoso Filho, B. Load torque signature analysis: An alternative to MCSA to detect faults in motor driven loads. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 4029–4036. [Google Scholar]
- da Silva, A.M.; Povinelli, R.J.; Demerdash, N.A. Rotor bar fault monitoring method based on analysis of air-gap torques of induction motors. IEEE Trans. Ind. Inform. 2013, 9, 2274–2283. [Google Scholar] [CrossRef] [Green Version]
- Eftekharnejad, B.; Carrasco, M.R.; Charnley, B.; Mba, D. The application of spectral kurtosis on Acoustic Emission and vibrations from a defective bearing. Mech. Syst. Signal Process. 2011, 25, 266–284. [Google Scholar] [CrossRef] [Green Version]
- Kecik, K.; Smagala, A.; Lyubitska, K. Ball Bearing Fault Diagnosis Using Recurrence Analysis. Materials 2022, 15, 5940. [Google Scholar] [CrossRef]
- Cirrincione, G.; Kumar, R.R.; Mohammadi, A.; Kia, S.H.; Barbiero, P.; Ferretti, J. Shallow versus Deep Neural Networks in Gear Fault Diagnosis. IEEE Trans. Energy Convers. 2020, 35, 1338–1347. [Google Scholar] [CrossRef]
- Karabacak, Y.E.; Gürsel Özmen, N.; Gümüşel, L. Intelligent worm gearbox fault diagnosis under various working conditions using vibration, sound and thermal features. Appl. Acoust. 2022, 186, 108463. [Google Scholar] [CrossRef]
- Roura, J.; Martínez, J.L.R. Transient analysis and motor fault detection using the wavelet transform. In Discrete Wavelet Transforms—Theory and Applications; IntechOpen: London, UK, 2011. [Google Scholar]
- Bento, F.; Adouni, A.; Muxiri, A.C.; Fonseca, D.S.; Marques Cardoso, A.J. On the risk of failure to prevent induction motors permanent damage, due to the short available time-to-diagnosis of inter-turn short-circuit faults. IET Electr. Power Appl. 2021, 15, 51–62. [Google Scholar] [CrossRef]
- Li, X.; Shao, H.; Lu, S.; Xiang, J.; Cai, B. Highly Efficient Fault Diagnosis of Rotating Machinery Under Time-Varying Speeds Using LSISMM and Small Infrared Thermal Images. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7328–7340. [Google Scholar] [CrossRef]
- Balakrishnan, G.K.; Yaw, C.T.; Koh, S.P.; Abedin, T.; Raj, A.A.; Tiong, S.K.; Chen, C.P. A Review of Infrared Thermography for Condition-Based Monitoring in Electrical Energy: Applications and Recommendations. Energies 2022, 15, 6000. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.-A. Advances in electrical machine, power electronic, and drive condition monitoring and fault detection: State of the art. IEEE Trans. Ind. Electron. 2015, 62, 1746–1759. [Google Scholar] [CrossRef]
- Trigeassou, J.-C. Electrical Machines Diagnosis; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Stoica, P.; Moses, R.L. Spectral Analysis of Signals; Pearson Prentice Hall Upper Saddle River: Hoboken, NJ, USA, 2005; Volume 1. [Google Scholar]
- Kumar, R.R.; Cirrincione, G.; Cirrincione, M.; Tortella, A.; Andriollo, M. Induction Machine Fault Detection and Classification Using Non-Parametric, Statistical-Frequency Features and Shallow Neural Networks. IEEE Trans. Energy Convers. 2021, 36, 1070–1080. [Google Scholar] [CrossRef]
- Kumar, R.R.; Cirrincione, G.; Cirrincione, M.; Tortella, A.; Andriollo, M. A Topological Neural-Based Scheme for Classification of Faults in Induction Machines. IEEE Trans. Ind. Appl. 2021, 57, 272–283. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Thomson, W.T.; Gilmore, R.J. Motor Current Signature Analysis to Detect Faults in Induction Motor Drives-Fundamentals, Data Interpretation, and Industrial Case Histories. In Proceedings of the 32nd Turbomachinery Symposium, Houston, TX, USA, 8–11 September 2003. [Google Scholar]
- Riley, C.M.; Lin, B.K.; Habetler, T.G.; Kliman, G.B. Stator current harmonics and their causal vibrations: A preliminary investigation of sensorless vibration monitoring applications. IEEE Trans. Ind. Appl. 1999, 35, 94–99. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H.; Vieira, M.; Theys, C. Induction motors’ faults detection and localization using stator current advanced signal processing techniques. IEEE Trans. Power Electron. 1999, 14, 14–22. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H.; Kliman, G.B. What stator current processing-based technique to use for induction motor rotor faults diagnosis? IEEE Trans. Energy Convers. 2003, 18, 238–244. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.-H.; Lee, J.-J.; Kwon, B.-H. Online diagnosis of induction motors using MCSA. IEEE Trans. Ind. Electron. 2006, 53, 1842–1852. [Google Scholar] [CrossRef]
- Cardoso, A.M.; Cruz, S.; Fonseca, D. Inter-turn stator winding fault diagnosis in three-phase induction motors, by Park’s vector approach. IEEE Trans. Energy Convers. 1999, 14, 595–598. [Google Scholar] [CrossRef] [PubMed]
- Cruz, S.M.; Cardoso, A.M. Stator winding fault diagnosis in three-phase synchronous and asynchronous motors, by the extended Park’s vector approach. IEEE Trans. Ind. Appl. 2001, 37, 1227–1233. [Google Scholar] [CrossRef]
- Cardoso, A.M.; Saraiva, E.S. Computer-aided detection of airgap eccentricity in operating three-phase induction motors by Park’s vector approach. IEEE Trans. Ind. Appl. 1993, 29, 897–901. [Google Scholar] [CrossRef]
- Cardoso, A.M.; Saraiva, E.; Mateus, M.S.; Ramalho, A. Online detection of airgap eccentricity in 3-phase induction motors, using Park’s vector approach. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Dearborn, MI, USA, 28 September 1991; pp. 94–98. [Google Scholar]
- Mendes, A.M.; Cardoso, A.M. Voltage source inverter fault diagnosis in variable speed AC drives, by the average current Park’s vector approach. In Proceedings of the IEEE International Electric Machines and Drives Conference, IEMDC’99, Proceedings (Cat. No. 99EX272), Seattle, WA, USA, 9–12 May 1999; pp. 704–706. [Google Scholar]
- Önel, I.Y.; Benbouzid, M.E.H. Induction motor bearing failure detection and diagnosis: Park and concordia transform approaches comparative study. IEEE/ASME Trans. Mechatron. 2008, 13, 257–262. [Google Scholar] [CrossRef] [Green Version]
- Nejjari, H.; Benbouzid, M.E.H. Monitoring and diagnosis of induction motors electrical faults using a current Park’s vector pattern learning approach. IEEE Trans. Ind. Appl. 2000, 36, 730–735. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Marques Cardoso, A.J. Rotor cage fault diagnosis in three-phase induction motors by extended Park’s vector approach. Electr. Mach. Power Syst. 2000, 28, 289–299. [Google Scholar]
- Kliman, G.; Premerlani, W.; Koegl, R.; Hoeweler, D. A new approach to on-line turn fault detection in AC motors. In Proceedings of the IAS’96. Conference Record of the 1996 IEEE Industry Applications Conference Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; pp. 687–693. [Google Scholar]
- Oviedo, S.; Quiroga, J.; Borras, C. Motor current signature analysis and negative sequence current based stator winding short fault detection in an induction motor. Dyna 2011, 78, 214–220. [Google Scholar]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C.; Kliman, G.B. Quantitative evaluation of induction motor broken bars by means of electrical signature analysis. IEEE Trans. Ind. Appl. 2001, 37, 1248–1255. [Google Scholar] [CrossRef]
- Bonnett, A.H.; Soukup, G.C. Rotor failures in squirrel cage induction motors. IEEE Trans. Ind. Appl. 1986, IA-22, 1165–1173. [Google Scholar] [CrossRef]
- Puche-Panadero, R.; Pineda-Sanchez, M.; Riera-Guasp, M.; Roger-Folch, J.; Hurtado-Perez, E.; Perez-Cruz, J. Improved resolution of the MCSA method via Hilbert transform, enabling the diagnosis of rotor asymmetries at very low slip. IEEE Trans. Energy Convers. 2009, 24, 52–59. [Google Scholar] [CrossRef]
- Gaeid, K.S.; Mohamed, H.A. Diagnosis and fault tolerant control of the induction motors techniques a review. Aust. J. Basic Appl. Sci. 2010, 4, 227–246. [Google Scholar]
- Gandhi, A.; Corrigan, T.; Parsa, L. Recent advances in modeling and online detection of stator interturn faults in electrical motors. IEEE Trans. Ind. Electron. 2010, 58, 1564–1575. [Google Scholar] [CrossRef]
- Supangat, R.; Ertugrul, N.; Soong, W.; Gray, D.; Hansen, C.; Grieger, J. Detection of broken rotor bars in induction motor using starting-current analysis and effects of loading. IEE Proc.-Electr. Power Appl. 2006, 153, 848–855. [Google Scholar] [CrossRef]
- Antonino, J.; Riera, M.; Roger-Folch, J.; Climente, V. Study of the startup transient for the diagnosis of broken bars in induction motors: A review. Departamento de Ingeniería Eléctrica ETSII, Universidad Politécnica de Valencia. 2004. Available online: http://www.aedie.org/9CHLIE-paper-send/318_Antonino.pdf (accessed on 22 June 2022).
- Drozdowski, P.; Duda, A. Influence of magnetic saturation effects on the fault detection of induction motors. Arch. Electr. Eng. 2014, 63, 489–506. [Google Scholar] [CrossRef] [Green Version]
- Kia, S.H.; Henao, H.; Capolino, G.-A. A high-resolution frequency estimation method for three-phase induction machine fault detection. IEEE Trans. Ind. Electron. 2007, 54, 2305–2314. [Google Scholar] [CrossRef]
- Vachtsevanos, G.Z. Intelligent Fault Diagnosis and Prognosis for Engineering Systems; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Cirrincione, M.; Pucci, M.; Vitale, G. Power Converters and AC Electrical Drives with Linear Neural Networks; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Kowalski, C.T.; Wierzbicki, R.; Wolkiewicz, M. Stator and rotor faults monitoring of the inverter-fed induction motor drive using state estimators. Autom. Časopis Za Autom. Mjer. Elektron. Računarstvo I Komun. 2013, 54, 348–355. [Google Scholar] [CrossRef]
- Said, M.N.; Benbouzid, M.E.H.; Benchaib, A. Detection of broken bars in induction motors using an extended Kalman filter for rotor resistance sensorless estimation. IEEE Trans. Energy Convers. 2000, 15, 66–70. [Google Scholar] [CrossRef] [Green Version]
- Peyman, S.; Saeid, H.; Simon, H. Observers. In Nonlinear Filters: Theory and Applications; Wiley: Hoboken, NJ, USA, 2022; pp. 29–39. [Google Scholar]
- Namdar, A.; Samet, H.; Allahbakhshi, M.; Tajdinian, M.; Ghanbari, T. A robust stator inter-turn fault detection in induction motor utilizing Kalman filter-based algorithm. Measurement 2022, 187, 110181. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; El Khil, S.K.; Bellaaj, N.M.; Cardoso, A.J.M. Multiple open-circuit faults diagnosis in back-to-back converters of PMSG drives for wind turbine systems. IEEE Trans. Power Electron. 2014, 30, 2689–2702. [Google Scholar] [CrossRef]
- Deng, F.; Chen, Z.; Khan, M.R.; Zhu, R. Fault detection and localization method for modular multilevel converters. IEEE Trans. Power Electron. 2014, 30, 2721–2732. [Google Scholar] [CrossRef]
- Christophe, C.; Cocquempot, V.; Staroswiecki, M. Robust residual generation for the induction motor using elimination theory. In Proceedings of the 1999 IEEE International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Gijón, Spain, 1–3 September 1999; pp. 551–556. [Google Scholar]
- Isermann, R. Fault diagnosis of machines via parameter estimation and knowledge processing—Tutorial paper. Automatica 1993, 29, 815–835. [Google Scholar] [CrossRef]
- Moreau, S. Contribution à la Modélisation et à L’estimation Paramétrique des Machines Électriques à Courant Alternatif: Application au Diagnostic. Ph.D. Thesis, University of Poitiers, Poitiers, France, 1999. [Google Scholar]
- Hicken, J.E. Output error estimation for summation-by-parts finite-difference schemes. J. Comput. Phys. 2012, 231, 3828–3848. [Google Scholar] [CrossRef]
- Boumegoura, T. Recherche de Signature Électromagnétique des Défauts dans une Machine Synchrone et Synthèse D’observateurs en Vue du Diagnostic. Ph.D. Thesis, Ecole centrale de Lyon, Ecully, France, 2001. [Google Scholar]
- Boumegoura, T.; Marques, J.; Yahoui, H.; Clerc, G.; Hammouri, H. Rotor induction machine failure: Analysis and diagnosis. Eur. Trans. Electr. Power 2004, 14, 71–84. [Google Scholar] [CrossRef]
- Bazine, I.B.A.; Bazine, S.; Tnani, S.; Champenois, G. On-line broken bars detection diagnosis by parameters estimation. In Proceedings of the 2009 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–7. [Google Scholar]
- Bachir, S.; Tnani, S.; Champenois, G.; Trigeassou, J.-C. Diagnosis of induction machines by parameter estimation. In Control Methods for Electrical Machines; Wiley-ISTE: Hoboken, NJ, USA, 2009. [Google Scholar]
- Gelman, L.; Martin, N.; Malcolm, A.A.; Liew, C.K. Advances in Condition Monitoring and Structural Health Monitoring: WCCM 2019; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Lennart, L. System Identification: Theory for the User; PTR Prentice Hall Up: Saddle River, NJ, USA, 1999; pp. 1–14. [Google Scholar]
- Strang, G.; Fix, G.J. An Analysis of the Finite Element Method; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1973. [Google Scholar]
- Faiz, J.; Joksimović, G.; Ghorbanian, V. Fault Diagnosis of Induction Motors; Institution of Engineering & Technology: London, UK, 2017. [Google Scholar]
- Moaveni, S. Finite Element Analysis Theory and Application with ANSYS, 3/e; Pearson Education India: Noida, India, 2011. [Google Scholar]
- Liang, X.; Ali, M.Z.; Zhang, H. Induction Motors Fault Diagnosis Using Finite Element Method: A Review. IEEE Trans. Ind. Appl. 2019, 56, 1205–1217. [Google Scholar] [CrossRef]
- Duan, Y.; Ionel, D.M. A review of recent developments in electrical machine design optimization methods with a permanent-magnet synchronous motor benchmark study. IEEE Trans. Ind. Appl. 2013, 49, 1268–1275. [Google Scholar] [CrossRef]
- Lei, G.; Zhu, J.; Guo, Y.; Liu, C.; Ma, B. A Review of Design Optimization Methods for Electrical Machines. Energies 2017, 10, 1962. [Google Scholar] [CrossRef]
- Andria, G.; D’ambrosio, E.; Savino, M.; Trotta, A. Application of Wigner-Ville distribution to measurements on transient signals. In Proceedings of the 1993 IEEE Instrumentation and Measurement Technology Conference, Irvine, CA, USA, 18–20 May 1993; pp. 612–617. [Google Scholar]
- Kral, C.; Habetler, T.G.; Harley, R.G. Detection of mechanical imbalances of induction machines without spectral analysis of time-domain signals. IEEE Trans. Ind. Appl. 2004, 40, 1101–1106. [Google Scholar] [CrossRef]
- Ondel, O. Diagnostic par Reconnaissance des Formes: Application à un Ensemble Convertisseur-Machine Asynchrone. Ph.D. Thesis, Ecole Centrale de Lyon, Écully, France, 2006. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Gritli, Y.; Zarri, L.; Rossi, C.; Filippetti, F.; Capolino, G.-A.; Casadei, D. Advanced diagnosis of electrical faults in wound-rotor induction machines. IEEE Trans. Ind. Electron. 2013, 60, 4012–4024. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Diagnosis of broken-bar fault in induction machines using discrete wavelet transform without slip estimation. IEEE Trans. Ind. Appl. 2009, 45, 1395–1404. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Perez-Cruz, J. A general approach for the transient detection of slip-dependent fault components based on the discrete wavelet transform. IEEE Trans. Ind. Electron. 2008, 55, 4167–4180. [Google Scholar] [CrossRef]
- Stefani, A.; Bellini, A.; Filippetti, F. Diagnosis of induction machines’ rotor faults in time-varying conditions. IEEE Trans. Ind. Electron. 2009, 56, 4548–4556. [Google Scholar] [CrossRef]
- Drif, M.h.; Cardoso, A.J.M. Stator fault diagnostics in squirrel cage three-phase induction motor drives using the instantaneous active and reactive power signature analyses. IEEE Trans. Ind. Inform. 2014, 10, 1348–1360. [Google Scholar] [CrossRef]
- Drif, M.h.; Cardoso, A.M. Rotor cage fault diagnostics in three-phase induction motors, by the instantaneous non-active power signature analysis. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 1050–1055. [Google Scholar]
- Shehata, S.A.; El-Goharey, H.S.; Marei, M.I.; Ibrahim, A.K. Detection of induction motors rotor/stator faults using electrical signatures analysis. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ’13), Bilbao, Spain, 20–22 March 2013. [Google Scholar]
- Trzynadlowski, A.M.; Ghassemzadeh, M.; Legowski, S. Diagnostics of mechanical abnormalities in induction motors using instantaneous electric power. IEEE Trans. Energy Convers. 1999, 14, 1417–1423. [Google Scholar] [CrossRef]
- Jazdi, N. Cyber physical systems in the context of Industry 4.0. In Proceedings of the 2014 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–24 May 2014; pp. 1–4. [Google Scholar]
- Bmiet, S. Industrial Revolution–From Industry 1.0 to Industry 4.0. J. Adv. Comput. Intell. Commun. Technol. 2018, 2, 1–2. [Google Scholar]
- Wahlster, W. From industry 1.0 to industry 4.0: Towards the 4th industrial revolution. In Proceedings of the Forum Business meets Research, 3rd European Summit on Future Internet towards Future Internet International Collaborations, Espo, Finalnd, Espoo, Finland, 31 May 2012. [Google Scholar]
- Pecht, M. Prognostics and Health Management of Electronics; Encyclopedia of Structural Health Monitoring; Wiley Online Library: Hoboken, NJ, USA, 2009. [Google Scholar]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep Learning Algorithms for Bearing Fault Diagnostics—A Comprehensive Review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Palmieri, F.A.N.; Baldi, M.; Buonanno, A.; Di Gennaro, G.; Ospedale, F. Probing a Deep Neural Network. In Neural Approaches to Dynamics of Signal Exchanges; Esposito, A., Faundez-Zanuy, M., Morabito, F.C., Pasero, E., Eds.; Springer: Singapore, 2020; pp. 201–211. [Google Scholar]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Machine Learning and Deep Learning Algorithms for Bearing Fault Diagnostics-A Comprehensive Review. arXiv 2019, arXiv:1901.08247. [Google Scholar] [CrossRef]
- Trachi, Y.; Elbouchikhi, E.; Choqueuse, V.; Benbouzid, M.E.H. Induction machines fault detection based on subspace spectral estimation. IEEE Trans. Ind. Electron. 2016, 63, 5641–5651. [Google Scholar] [CrossRef] [Green Version]
- Riera-Guasp, M.; Pons-Llinares, J.; Climente-Alarcon, V.; Vedreño-Santos, F.; Pineda-Sanchez, M.; Antonino-Daviu, J.; Puche-Panadero, R.; Perez-Cruz, J.; Roger-Folch, J. Diagnosis of induction machines under non-stationary conditions: Concepts and tools. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 220–231. [Google Scholar]
- Boukra, T.; Lebaroud, A.; Clerc, G. Statistical and neural-network approaches for the classification of induction machine faults using the ambiguity plane representation. IEEE Trans. Ind. Electron. 2013, 60, 4034–4042. [Google Scholar] [CrossRef]
- Prieto, M.D.; Cirrincione, G.; Espinosa, A.G.; Ortega, J.A.; Henao, H. Bearing fault detection by a novel condition-monitoring scheme based on statistical-time features and neural networks. IEEE Trans. Ind. Electron. 2013, 60, 3398–3407. [Google Scholar] [CrossRef]
- Lee, J.A.; Verleysen, M. Nonlinear Dimensionality Reduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Stone, J.V. Independent Component Analysis: A Tutorial Introduction; The MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Van Der Maaten, L.; Postma, E.; Van den Herik, J. Dimensionality reduction: A comparative. J. Mach. Learn Res. 2009, 10, 66–71. [Google Scholar]
- Sanger, T.D. Optimal unsupervised learning in a single-layer linear feedforward neural network. Neural. Netw. 1989, 2, 459–473. [Google Scholar] [CrossRef]
- Diamantaras, K.I.; Kung, S.Y. Principal Component Neural Networks: Theory and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1996. [Google Scholar]
- Weng, J.; Zhang, Y.; Hwang, W.-S. Candid covariance-free incremental principal component analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 1034–1040. [Google Scholar] [CrossRef] [Green Version]
- Qiang, X.; Cheng, G.; Li, Z. A survey of some classic self-organizing maps with incremental learning. In Proceedings of the 2010 2nd International Conference on Signal Processing Systems (ICSPS), Dalian, China, 5–7 July 2010; pp. V1-804–V1-809. [Google Scholar]
- Fritzke, B. A growing neural gas network learns topologies. In Proceedings of the Advances in Neural Information Processing Systems, Denver, CO, USA, 27–30 November 1995; pp. 625–632. [Google Scholar]
- Martinetz, T.; Schulten, K. A “neural-gas” network learns topologies. Artif. Neural Netw. 1991, 1, 397–402. [Google Scholar]
- Kumar, R.R.; Randazzo, V.; Cirrincione, G.; Cirrincione, M.; Pasero, E.; Tortella, A.; Andriollo, M. Induction Machine Stator Fault Tracking Using the Growing Curvilinear Component Analysis. IEEE Access 2021, 9, 2201–2212. [Google Scholar] [CrossRef]
- Cirrincione, G.; Hérault, J.; Randazzo, V. The on-line curvilinear component analysis (onCCA) for real-time data reduction. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–8. [Google Scholar]
- Cirrincione, G.; Randazzo, V.; Pasero, E. Growing Curvilinear Component Analysis (GCCA) for Dimensionality Reduction of Nonstationary Data. In Proceedings of the WIRN 2016 26th Italian Workshop on Neural Networks, Vietri sul Mare, Salerno, Italy, 18–20 May 2016. [Google Scholar]
- Kumar, R.; Randazzo, V.; Cirrincione, G.; Cirrincione, M.; Pasero, E. Analysis of stator faults in induction machines using growing curvilinear component analysis. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Demartines, P.; Hérault, J. Curvilinear component analysis: A self-organizing neural network for nonlinear mapping of data sets. IEEE Trans. Neural Netw. 1997, 8, 148–154. [Google Scholar] [CrossRef]
- Sun, J.; Fyfe, C.; Crowe, M. Curvilinear component analysis and Bregman divergences. In Proceedings of the ESANN, Bruges, Belgium, 28–30 April 2010. [Google Scholar]
- Yuan, J.; Liu, X. Semi-supervised learning and condition fusion for fault diagnosis. Mech. Syst. Signal Process. 2013, 38, 615–627. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Z.; Zhang, Z.; Jia, L.; Qin, Y. A semi-supervised approach to bearing fault diagnosis under variable conditions towards imbalanced unlabeled data. Sensors 2018, 18, 2097. [Google Scholar] [CrossRef]
- Immovilli, F.; Bianchini, C.; Cocconcelli, M.; Bellini, A.; Rubini, R. Bearing fault model for induction motor with externally induced vibration. IEEE Trans. Ind. Electron. 2013, 60, 3408–3418. [Google Scholar] [CrossRef]
- Kriese, M.; Wittek, E.; Gattermann, S.; Tischmacher, H.; Poll, G.; Ponick, B. Influence of bearing currents on the bearing lifetime for converter driven machines. In Proceedings of the 2012 XXth International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 1735–1739. [Google Scholar]
- Schmitt, H.L.; Silva, L.R.; Scalassara, P.R.; Goedtel, A. Bearing fault detection using relative entropy of wavelet components and artificial neural networks. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 538–543. [Google Scholar]
- Harlişca, C.; Szabó, L.; Frosini, L.; Albini, A. Bearing faults detection in induction machines based on statistical processing of the stray fluxes measurements. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 371–376. [Google Scholar]
- Batista, L.; Badri, B.; Sabourin, R.; Thomas, M. Detecting bearing defects under high noise levels: A classifier fusion approach. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 3880–3886. [Google Scholar]
- Harmouche, J.; Delpha, C.; Diallo, D. A global approach for the classification of bearing faults conditions using spectral features. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7352–7357. [Google Scholar]
- He, D.; Li, R.; Zhu, J. Plastic bearing fault diagnosis based on a two-step data mining approach. IEEE Trans. Ind. Electron. 2013, 60, 3429–3440. [Google Scholar] [CrossRef]
- Soualhi, A.; Clerc, G.; Razik, H. Detection and diagnosis of faults in induction motor using an improved artificial ant clustering technique. IEEE Trans. Ind. Electron. 2013, 60, 4053–4062. [Google Scholar] [CrossRef]
- Karvelis, P.; Tsoumas, I.P.; Georgoulas, G.; Stylios, C.D.; Antonino-Daviu, J.A.; Climente-Alarcón, V. An intelligent icons approach for rotor bar fault detection. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 5526–5531. [Google Scholar]
- Ferracuti, F.; Giantomassi, A.; Iarlori, S.; Ippoliti, G.; Longhi, S. Induction motor fault detection and diagnosis using KDE and Kullback-Leibler divergence. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 2923–2928. [Google Scholar]
- Grezmak, J.; Wang, P.; Sun, C.; Gao, R.X. Explainable Convolutional Neural Network for Gearbox Fault Diagnosis. Procedia CIRP 2019, 80, 476–481. [Google Scholar] [CrossRef]
- Chen, Z.; Li, C.; Sanchez, R.-V. Gearbox fault identification and classification with convolutional neural networks. Shock Vib. 2015, 2015, 390134. [Google Scholar] [CrossRef] [Green Version]
- Eren, L. Bearing fault detection by one-dimensional convolutional neural networks. Math. Probl. Eng. 2017, 2017, 8617315. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Siu, V.; Cruz, R.; Yetman, C. Convolutional neural net and bearing fault analysis. In Proceedings of the International Conference on Data Mining (DMIN), Las Vegas, NV, USA, 25–28 July 2016; p. 194. [Google Scholar]
- Bachir, S. Contribution au Diagnostic de la Machine Asynchrone par Estimation Paramétrique. Ph.D. Thesis, Université de Poitiers, Poitiers, France, 2002. [Google Scholar]
- Lipo, T.A.; Consoli, A. Modeling and simulation of induction motors with saturable leakage reactances. IEEE Trans. Ind. Appl. 1984, IA-20, 180–189. [Google Scholar] [CrossRef]
- Andria, G.; Dell’Aquila, A.; Salvatore, L.; Savino, M. Improvement in modeling and testing of induction motors. IEEE Trans. Energy Convers. 1987, EC-2, 285–293. [Google Scholar] [CrossRef]
- Faiz, J.; Seifi, A. Dynamic analysis of induction motors with saturable inductances. Electr. Power Syst. Res. 1995, 34, 205–210. [Google Scholar] [CrossRef]
- Bispo, D.; Martins, L.; de Resende, J.T.; de Andrade, D.A. A new strategy for induction machine modeling taking into account the magnetic saturation. IEEE Trans. Ind. Appl. 2001, 37, 1710–1719. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A. Novel frequency-domain-based technique to detect stator interturn faults in induction machines using stator-induced voltages after switch-off. IEEE Trans. Ind. Appl. 2002, 38, 101–109. [Google Scholar] [CrossRef]
- Lee, S.B.; Tallam, R.M.; Habetler, T.G. A robust, on-line turn-fault detection technique for induction machines based on monitoring the sequence component impedance matrix. IEEE Trans. Power Electron. 2003, 18, 865–872. [Google Scholar]
- Cash, M.A.; Habetler, T.G.; Kliman, G.B. Insulation failure prediction in AC machines using line-neutral voltages. IEEE Trans. Ind. Appl. 1998, 34, 1234–1239. [Google Scholar] [CrossRef]
- Kato, T.; Inoue, K.; Yoshida, K. Diagnosis of Stator-Winding-Turn Faults of Induction Motor by Direct Detection of Negative Sequence Currents. Electr. Eng. Jpn. 2014, 186, 75–84. [Google Scholar] [CrossRef]
- Stone, G.C.; Sedding, H.G. In-service evaluation of motor and generator stator windings using partial discharge tests. In Proceedings of the Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993; pp. 240–247. [Google Scholar]
- Ukil, A.; Chen, S.; Andenna, A. Detection of stator short circuit faults in three-phase induction motors using motor current zero crossing instants. Electr. Power Syst. Res. 2011, 81, 1036–1044. [Google Scholar] [CrossRef]
- Sudha, M.; Anbalagan, P. A novel protecting method for induction motor against faults due to voltage unbalance and single phasing. In Proceedings of the IECON 2007-33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1144–1148. [Google Scholar]
- Alshorman, O.; Alshorman, A. A review of intelligent methods for condition monitoring and fault diagnosis of stator and rotor faults of induction machines. Int. J. Electr. Comput. Eng. 2021, 11, 2820–2829. [Google Scholar] [CrossRef]
- Zidani, F.; Benbouzid, M.E.H.; Diallo, D.; Naït-Saïd, M.S. Induction motor stator faults diagnosis by a current Concordia pattern-based fuzzy decision system. IEEE Trans. Energy Convers. 2003, 18, 469–475. [Google Scholar] [CrossRef] [Green Version]
- Benbouzid, M. Induction motor interturn short-circuit and bearing wear detection using artificial neural networks. Electromotion 1998, 5, 15–20. [Google Scholar]
- Penman, J.; Dey, M.; Tait, A.; Bryan, W. Condition monitoring of electrical drives. IEE Proc. B-Electr. Power Appl. 1986, 133, 142–148. [Google Scholar] [CrossRef]
- László Timar, P. Noise test on rotating electrical motors under load. Electr. Mach. Power Syst. 1992, 20, 339–353. [Google Scholar] [CrossRef]
- Gardel, P.; Morinigo-Sotelo, D.; Duque-Perez, O.; Perez-Alonso, M.; Garcia-Escudero, L.A. Neural network broken bar detection using time domain and current spectrum data. In Proceedings of the 2012 XXth International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 2492–2497. [Google Scholar]
- Hamdani, S.; Mezerreg, H.; Boutikar, B.; Lahcene, N.; Touhami, O.; Ibtiouen, R. Rotor fault diagnosis in a squirrel-cage induction machine using support vector. In Proceedings of the 2012 XXth International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 1817–1822. [Google Scholar]
- Xu, B.; Sun, L.; Xu, L.; Xu, G. An ESPRIT-SAA-based detection method for broken rotor bar fault in induction motors. IEEE Trans. Energy Convers. 2012, 27, 654–660. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Windings monitoring of wound rotor induction machines under fluctuating load conditions. In Proceedings of the IECON 2011-37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 3459–3465. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Climente-Alarcon, V.; Antonino-Daviu, J.; Riera-Guasp, M.; Puche-Panadero, R.; Escobar, L. Application of the Wigner–Ville distribution for the detection of rotor asymmetries and eccentricity through high-order harmonics. Electr. Power Syst. Res. 2012, 91, 28–36. [Google Scholar] [CrossRef]
- Li, B.; Zhang, P.-L.; Wang, Z.-J.; Mi, S.-S.; Liu, D.-S. A weighted multi-scale morphological gradient filter for rolling element bearing fault detection. ISA Trans. 2011, 50, 599–608. [Google Scholar] [CrossRef]
- Hahn, S.L. Hilbert Transforms in Signal Processing; Artech House Boston: Boston, MA, USA, 1996; Volume 2. [Google Scholar]
- Mardia, K.V. Measures of multivariate skewness and kurtosis with applications. Biometrika 1970, 57, 519–530. [Google Scholar] [CrossRef]
- Hayes, M.H. Statistical Digital Signal Processing and Modeling; John Wiley & Sons: New York, NY, USA, 1996. [Google Scholar]
- Immovilli, F.; Bellini, A.; Rubini, R.; Tassoni, C. Diagnosis of bearing faults in induction machines by vibration or current signals: A critical comparison. IEEE Trans. Ind. Appl. 2010, 46, 1350–1359. [Google Scholar] [CrossRef]
- Zarri, L.; Mengoni, M.; Tani, A.; Gritli, Y.; Serra, G.; Filippetti, F.; Casadei, D. Full detection of high-resistance connections in multiphase induction machines. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 505–511. [Google Scholar]
- Zarri, L.; Mengoni, M.; Gritli, Y.; Tani, A.; Filippetti, F.; Serra, G.; Casadei, D. Detection and localization of stator resistance dissymmetry based on multiple reference frame controllers in multiphase induction motor drives. IEEE Trans. Ind. Electron. 2013, 60, 3506–3518. [Google Scholar] [CrossRef]
- Song, Y.; Wang, B. Survey on reliability of power electronic systems. IEEE Trans. Power Electron. 2013, 28, 591–604. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Failed Component | Induction Motors | Synchronous Motors | Wound Rotor Motors | DC Motors | Total (All Motors) |
|---|---|---|---|---|---|
| Bearings | 152 | 2 | 10 | 10 | 166 |
| Windings | 75 | 16 | 6 | 6 | 97 |
| Rotor | 8 | 1 | 4 | 4 | 13 |
| Shaft or Coupling | 19 | 6 | - | - | 19 |
| Brushes or slip rings | - | 7 | 8 | 2 | 16 |
| External Devices | 10 | 9 | 1 | - | 18 |
| Not specified | 40 | 9 | - | 2 | 51 |
| Total | 304 | 41 | 41 | 6 | 380 |
| Fault Type | IEEE Working Group [6] | EPRI [7] | [9,10,11,12,13] | [14] | [17] | Allianz [8] | [19] | [15] | [16] | [18] |
|---|---|---|---|---|---|---|---|---|---|---|
| Bearing | 44 | 41 | 40 | 41 | 69 | 13 | 40~50 | 51 | 40~50 | 42 |
| Stator-related 1 | 26 | 37 | 38 | 23 | 21 | 66 | 28~43 | 26 | 30~40 | 31 |
| Rotor-related 2 | 8 | 10 | 10 | 10 | 10 | 13 | 5~10 | 7 | 5~10 | 9 |
| Others | 22 | 12 | - | 12 | - | 8 | 12 | 16 | - | 12 |
| Statistical Approaches | |
|---|---|
| Parametric Methods | Non-Parametric Methods |
|
|
| Classification and Clustering | |||
|---|---|---|---|
| Supervised | Unsupervised | ||
Discriminative Approach
| Generative Approach
| Discriminative Approach
| Generative Approach
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, R.R.; Andriollo, M.; Cirrincione, G.; Cirrincione, M.; Tortella, A. A Comprehensive Review of Conventional and Intelligence-Based Approaches for the Fault Diagnosis and Condition Monitoring of Induction Motors. Energies 2022, 15, 8938. https://doi.org/10.3390/en15238938
Kumar RR, Andriollo M, Cirrincione G, Cirrincione M, Tortella A. A Comprehensive Review of Conventional and Intelligence-Based Approaches for the Fault Diagnosis and Condition Monitoring of Induction Motors. Energies. 2022; 15(23):8938. https://doi.org/10.3390/en15238938
Chicago/Turabian StyleKumar, Rahul R., Mauro Andriollo, Giansalvo Cirrincione, Maurizio Cirrincione, and Andrea Tortella. 2022. "A Comprehensive Review of Conventional and Intelligence-Based Approaches for the Fault Diagnosis and Condition Monitoring of Induction Motors" Energies 15, no. 23: 8938. https://doi.org/10.3390/en15238938