1. Introduction
In power systems, the automated voltage regulator (AVR) is employed to maintain the terminal voltage of a synchronous generator at a suitable level. The AVR system regulates the constancy of the terminal voltage by adjusting the generator’s exciter voltage [
1,
2]. In power system applications, maintaining a consistent input voltage has always been a difficult problem. When there is a sudden shift in load for power supply requirements, the AVR system is employed to stabilize the voltage value.
The AVR system is now receiving a lot of attention in the industry for keeping the synchronous generator’s terminal voltage constant under all situations. Classical integer order proportional-integral-derivative (IOPID) [
3,
4,
5], proportional-integral-derivative acceleration (PIDA) [
6], fractional order PID (FOPID) [
7,
8,
9], PID plus second-order derivative (PIDD2) controller [
10], modified neural network (MNN) [
11], genetic algorithm (GA) [
12], interval type-2 fuzzy logic (IT2FL) [
13], and a differential evolution—artificial electric field algorithm (DE-AEFA) [
14].
Likewise, the objective function can also be of any type such as integral of time multiplied square error (ITSE) [
15], integral of time multiplied absolute error (ITAE) [
16], integral absolute error (IAE) [
17] and integral square error (ISE) [
18].
However, even for the same controllers, several optimization methods are available. For example, artificial bee colony (ABC) [
15], stochastic fractal search [
19], whale optimization algorithm (WOA) [
20], improved whale optimization algorithm (IWOA) [
21], sine-cosine algorithm (SCA) [
22], tree seed algorithm (TSA) [
23], particle swarm optimization (PSO) [
24], improved kidney-inspired algorithm (IKIA) [
25], cuckoo search (CS) [
26], genetic algorithm [
12,
27], many optimizing liaisons (MOL) [
28], grey wolf optimization (GWO) [
18], crow search algorithm (CSA) [
29], water wave optimization (WWO) [
30], local unimodal sampling (LUS) [
31], water cycle algorithm (WCA) [
32], and ant colony optimization (ACO) [
33], are optimization algorithms that have been proposed to tune the controller parameters of an AVR system. In refs. [
14,
34], the authors investigated the combined analysis of load frequency control (LFC) and automatic voltage regulation (AVR), where a differential evolution—artificial electric field algorithm—is presented and is applied to the combined LFC-AVR model. Further examples of the intelligent strategies for achieving optimal parameters in various systems can be found in [
35,
36,
37,
38].
Using fractional calculus, it is possible to improve the performance of the PID controller in AVR systems. The FOPID controller (FOPID) is a type of classical PID controller that employs fractions instead of integers in order of derivation and integration. Furthermore, as compared to the integer order PID controller, FOPID provides a better transient response while also being more robust and stable [
39,
40,
41,
42,
43,
44,
45]. Because of the previously indicated benefits of the FOPID, this research focuses on this form of controller.
In this paper a low-order approximation (LOA) of fractional order PID (FOPID) based on the artificial bee colony (ABC) has been proposed. The IABC/FOPID controller approximation, which is distinguished by a transfer function of integer order and a long memory (or high order approximation (HOA)), named IABC/HOA-FOPID, and requires a lot of parameters to be used. To enhance the performance of the AVR system in terms of transient and frequency responses analysis, the complete IABC/HOA-FOPID controller’s memory capacity was reduced so that it could fit better in the corrective loop, the new robust controller is named IABC/LOA-FOPID.
The following list summarizes this paper’s originality contribution:
- -
For the first time, the low-order approximation of a FOPID controller based on the ABC algorithm (named IABC/LOA-FOPID) is used.
- -
In terms of transient response performance, the proposed IABC/LOA-FOPID controller was thoroughly compared to various strategies in the literature, such as IWOA-PID [
21], PSO-PID [
12], ABC-PID [
15], CS-PID [
26], MOL-PID [
28], GA-PID [
12], LUS-PID [
31], and TSA [
23]. The findings of the research clearly show that the LOA-FOPID controller tuned by IABC is better.
- -
To investigate the system’s behavior, several robustness tests are specifically studied. All along the experiments, the LOA-FOPID regulator optimized by ABC outperforms the classical or fractional PID controller, whose parameters have been optimized by the other methods that have been researched in the literature.
This paper is organized as follows:
Section 2 provides a brief overview of the AVR system’s composition, the fundamentals of fractional calculus, and the stability of fractional order systems.
Section 3 provides a thorough explanation and mathematical formulation of the proposed IABC/LOA-FOPID controller. The simulation results are displayed in
Section 4 of this study.
Section 5 summarizes the study’s overall findings.
3. Fractional PID Controller Based on IABC Algorithm
3.1. ABC Algorithm
The employed bees, following bees, and scout bees are the three categories that the basic algorithm of the artificial bee colony divides the population and assigns a search to each type of artificial bee phase [
52,
53]. As a starting point, the initial solution (food sources) is arbitrarily generated. All solutions
;
stands for the position of all food sources.
Equation (10) is used by the employed bee to conduct a random search of the feasible domain in search of food sources. The deployed bee then passes the results of the food source multiplication to the next bee, which is waiting in the hive to perform the food source search.
where
k = 1, 2, …,
N and
j = 1, 2, …,
d.
k is a randomly selected indicator for different
i.
N stands for the population size, and
D stands for the problem dimension,
rij is a random number between −1 and 1.
In the following bee stage, the food source is selected by the onlooker bee based on likelihood. As can be seen from (Equation (11)) below, the probability value,
prob(
i), is calculated:
When an onlooker makes a decision about which food source to choose, it starts searching for it, generates an updated location by (10), assesses the profitability, and then remembers the better location. fit(i) in (11) represents the fitness value of the ith food source Xi.
The scout bees reject all food sources that have previously been used to make honey during this phase, going over the permitted intake for all food sources. A bee that has been working on a food source that has been abandoned eventually develops into a scout bee. The scout will investigate a new food source at random (12).
3.2. Fractional Order PID Controller
Classical PID controllers are frequently used because of their basic design and simple implementation. The dynamic response of the AVR system can be improved by using controllers with fractional order PID (FOPID) or integer order PID (IOPID). With respect to the error signal, the PID controller executes three major control actions using proportional, integral, and derivative approaches. The PID controller transfer function is provided by:
where
Kp represents the proportional gain, and
Ki and
Kd represent the integral and derivative gains respectively.
The fractional order PID controller is an extension of the traditional PID controller, offering an integration of order
λ and a differentiation of order
μ, where
λ and
μ can be any positive real integer.
where the two additional parameters are
λ (fractional order integration) and
μ. (fractional order differentiation).
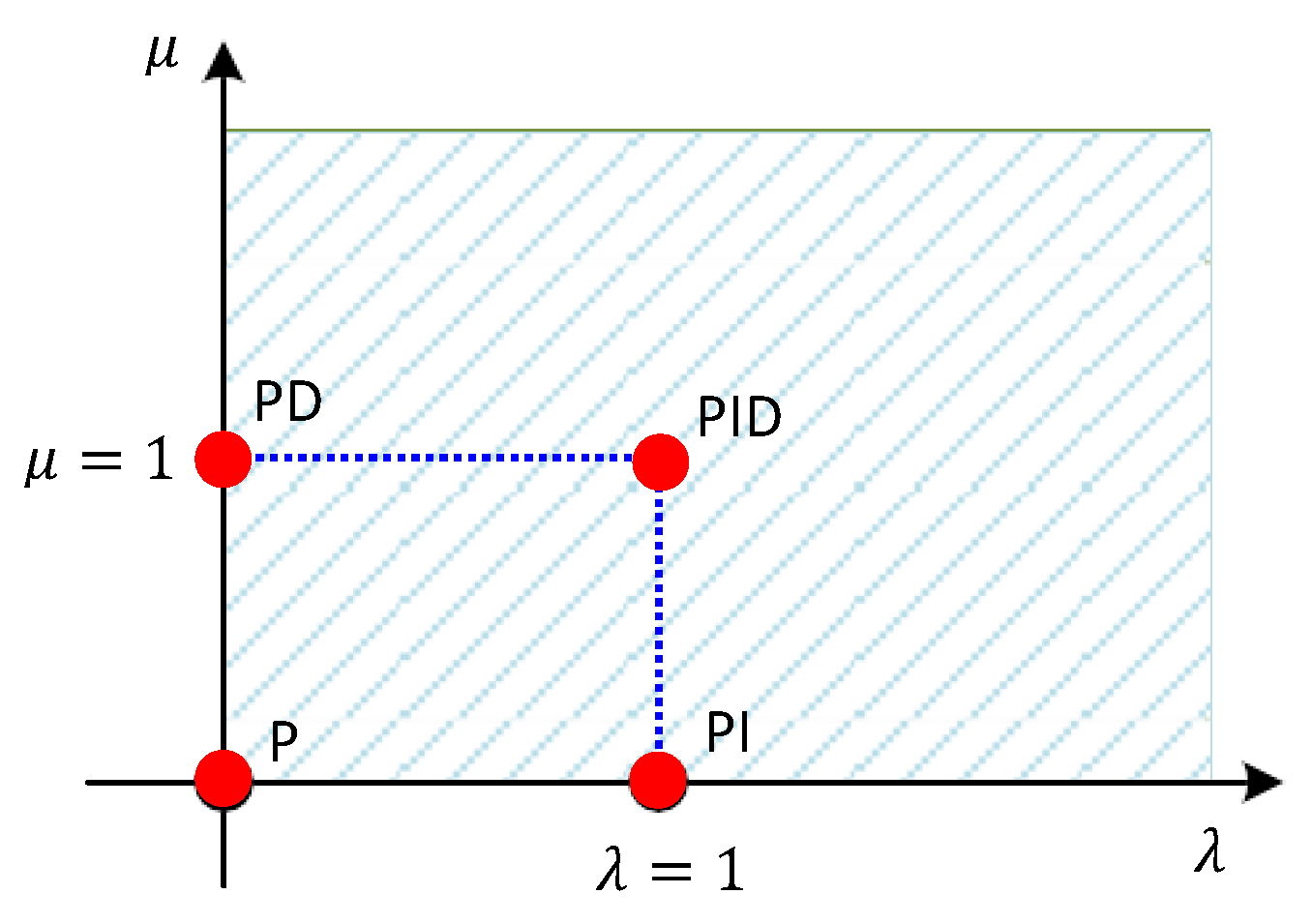
The fractional PID controller is the most popular kind of PID controller because of its original characteristics. There are various kinds of FOPID controllers, such as PID
PI
PD
, and the P controller
. The graphical representation of the various PID controllers is shown in
Figure 4.
3.3. Design of the FOPID Controller Using IABC
To optimize the parameters of the FOPID controller (
, the modified ABC algorithm presented in [
52], which is based on the use of cyclic exchange neighborhood and chaos (CNC), is used.
Figure 5 depicts an AVR system with an IABC-FOPID controller. A food source location represents a potential solution of the FOPID controller to be optimized, which is represented by a vector with five components,
. Each solution’s fitness is determined by (15).
The modified ABC algorithm described in [
50], which is based on the use of the cyclic exchange neighborhood and chaos (CNC), is used to optimize the parameters of the FOPID controller (
. An AVR system with an IABC/LOA-FOPID controller is shown in
Figure 5. The FOPID controller to be optimized has a potential solution represented by a food source location, which is represented by a vector with five components,
.
The fitness of each solution is given by (15).
where:
represents the output of the system, in our case is the output voltage of the generator; noted
.
is the reference voltage; noted
.
The following are the main design steps [
52].
Step 1: Start with the basic solution.
Step 2: Determine each initial solution’s fitness .
Step 3: Set cycle to 1.
Step 4: Bees are used to produce new solutions
, and fitness is calculated, both using (16) and (15);
Step 5: Use the greedy selection to select the best one between and .
Step 6: Using Equation (11), compute the probability values prob(i) of the solutions.
Step 7: Onlooker bees select the solution based on prob(i), then look for a neighbor to generate new solutions by (10) and calculate fitness by (15).
Step 8: Use a greedy choice to find the right and best solution.
Step 9: If a solution requires improvement, scouts should conduct a search for chaos.
Step 10: Commit the best answer so far to memory.
Step 11: Cycle = cycle + 1; if cycle is greater than the allowed number of cycles, the process is stopped; if not, move on to step 4.
Figure 5 illustrates the block design for the proposed IABC/LOA-FOPID controller used in an AVR system.
3.4. Sub-Optimal Reduction Algorithm
Figure 6 shows the error signal for model reduction, where the initial model is provided by:
Our present goal is to develop a low-order approximation (LOA) integer-order model of the type in [
54]:
An objective function to reduce the H2 norm of the reduction error signal is as follows:
With
the parameters are to enhance such that:
To find the low-order approximation (LOA) model of the fractional-order model characterized by a long memory, use the following approaches [
55]:
Choose an initial simplified model .
Get an error function
Use the Powell optimization method [
55] to iterate a step to obtain a better estimation of the
model.
Set , go to step 2 until an optimal LOA model is obtained.
4. Results and Discussion
The algorithm’s performance in managing the AVR system specified in Equation (1) is validated by the simulations that follow. The simulations were created using the MATLAB/SIMULINK software.
Table 3 provides a list of the proposed IABC algorithm’s parameters.
Table 4 shows the parameters of the IABC/LOA-FOPID controller that was identified during the optimization process.
For the AVR model system given in Equation (1) with the following fractional PID parameters: , and , an IABC algorithm is used to build a fractional PID controller.
The IABC/FPID controller is given by:
Consequently, the Oustaloup approach with
,
and unity feedback yields the IABC/HOA-FOPID controller’s closed loop transfer function as follows:
and it can be observed that the approximation model’s order is 15, which is rather high.
We can now obtain the low-order approximation, such as
r = 3,
m = 5. The following equation gives the reduced model:
Figure 7 illustrates the Bode diagrams of the high- and low-order approximation models.
The low-order approximation model, as it can be seen from the
Figure 7, is remarkably close to the high-order approximation model.
The PID controller parameters shown in
Table 4 were utilized for comparison with other current techniques such as IWOA-PID [
21], PSO-PID [
12], ABC-PID [
15], CS-PID [
26], MOL-PID [
28], GA-PID [
12], LUS-PID [
31], and TSA [
23]. Consequently, the closed loop transfer function
GCL derived via IWOA-PID [
21], PSO-PID [
12], ABC-PID [
15], CS-PID [
26], MOL-PID [
28], GA-PID [
12], LUS-PID [
31], and TSA [
23], are as follows:
4.1. Transient Response Analysis Comparison
Figure 8,
Figure 9,
Figure 10 and
Figure 11 present the results of the step response and transient response comparison analysis for AVR control systems designed using different approaches.
Figure 8 shows the step response comparisons while bar chart comparisons of maximum overshoot (in %), settling time (for ±2% tolerance) and rise times (for 10% → 90%) are given by
Figure 10,
Figure 11 and
Figure 12.
According to these figures, the IABC/LOA-FOPID controller obviously has a superior time response than the others, including the ABC-PID controller. As a result, the suggested controller design technique outperforms not only the ABC-based design approach, but also various methods for controller design, such as IWOA-PID [
21], PSO-PID [
12], CS-PID [
26], MOL-PID [
28], GA-PID [
12], LUS-PID [
31], and TSA [
23], with higher transient stability, quick damping characteristics, and less overshoot.
Taking into consideration different parameters such as rise time, settling time and overshoot percentage, we made a comparative study and evaluation of our controller used in an AVR system application with other tuning PID techniques available in the literature. The results are shown in
Table 5.
Table 5 shows that the performance indices of maximum overshoot values (M
p[%]) obtained with PSO-PID [
12], ABC-PID [
15], CS-PID [
26] and LUS-PID [
31] have less overshoot and oscillations than the proposed controller. However, these controllers are slower in terms of rise time and settling time than other PID controllers. On the other hand, the proposed IABC/LOA-FOPID controller shows superior performance over the different optimized PID controllers in terms of settling time and rise time. Furthermore, the presented algorithm significantly reduces the performance index value.
4.2. Comparison of Frequency Domain Analyses
Bode plots with different controller settings are compared in
Figure 12.
Table 6 summarizes the results of the comparative frequency response performance study. Gain margin (
Gm: in decibels), phase margin (
φm: in degrees) and bandwidth (
Bw: in Hertz) are all parts of the performance criteria.
The data clearly shows that the proposed IABC/LOA-FOPID and TSA-PID controllers are the most stable systems in terms of the frequency response criteria.
As shown in
Table 6, the AVR systems with the ABC-PID [
15], CS-PID [
26], MOL-PID [
28] and LUS-PID [
31] controllers have the maximum phase margin of 180°, while the proposed IABC/LOA-FOPID controller has an acceptable phase margin (almost 180°). On the other hand, the proposed IABC/LOA-FOPID and TSA-PID [
23] controllers have the largest bandwidth and the quickest response. It is worth mentioning that a broad bandwidth enables the system to precisely follow random inputs.
4.3. Stability Assessment
The three most important stability measurement criteria, namely, pole-zero map, root-locus plot, and Bode analyses, were performed to evaluate the stability of the proposed IWOA-based AVR design, and are illustrated in
Figure 13,
Figure 14 and
Figure 15, respectively.
Figure 13 and
Figure 14 show that the closed-loop poles of the ABC/LOA-FOPID-based AVR system are located at s1 = −2.49 × 10
−3, s2 = −2.16 × 10
−1 + 7.75 × 10
−1i, s3 = −2.16 × 10
−1 + 7.75 × 10
−1i, s4 = −1.25 × 10
+1 + 1.12 × 10
+1i, and s5 = −1.25 × 10
+1 + 1.12 × 10
+1i, with comparable damping ratios of 1.00, 2.68 × 10
−1, 2.68 × 10
−1, 7.46 × 10
−1, and 7.46 × 10
−1. Since all of the closed-loop poles are on the left half of the s-plane, the system is stable and has an acceptable frequency response.
The AVR system (or any control system) provides information on the AVR system’s time-dependent response and stability. Any root locus diagram may be used to compute the poles (Eigen values) and damping ratio. Larger stability is associated with more negative poles and a higher damping ratio.
Table 7 compares the simulation results of several optimization-technique-based AVR systems for closed-loop poles, damping ratios, frequencies and time constants.
4.4. Noise Attenuation
Additive noise is considered in the input of the process to be regulated.
Figure 16 and
Figure 17 depict the temporal response characteristics of different integer order and fractional order PID controllers with random output noise of 2% and 20% of the reference signal amplitude, respectively. The overshoot produced with the various integer order PID and fractional controllers is extremely similar, as shown in
Figure 16.
Due to noise, the performance of the IABC/LOA-FOPID has obviously degraded, with an increased overshoot. However, due to the derivative term, the IABC/LOA-FOPID controller achieves better settling time in the range of 0.29 s, compared to the other existing techniques, as can be seen in
Figure 17.
4.5. Analysis of Robustness Comparison
In order to maintain the system’s responsiveness within acceptable limits, a robust controller is needed. Therefore, a robustness analysis was performed to determine how stable the proposed method is under step perturbations.
In
Figure 18, the proposed IABC/LOA/FOPID controller’s disturbance rejection performance is compared to that of the IWOA-PID [
21], PSO-PID [
12], ABC-PID [
15], CS-PID [
26], MOL-PID [
28], GA-PID [
12], LUS-PID [
31] and TSA/PID [
23] controller designs for the identical transfer function of an AVR system.
The most efficient control mechanism for disturbance rejection is provided by the proposed controller IABC/LOA-FOPID, which has a more stable structure, as shown in
Figure 18. Although all the controllers have high peak errors, the IABC/LOA-FOPID controller performs noticeably better.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}