
Influence of the Car Movable Aerodynamic Elements on Fast Road Car Cornering

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
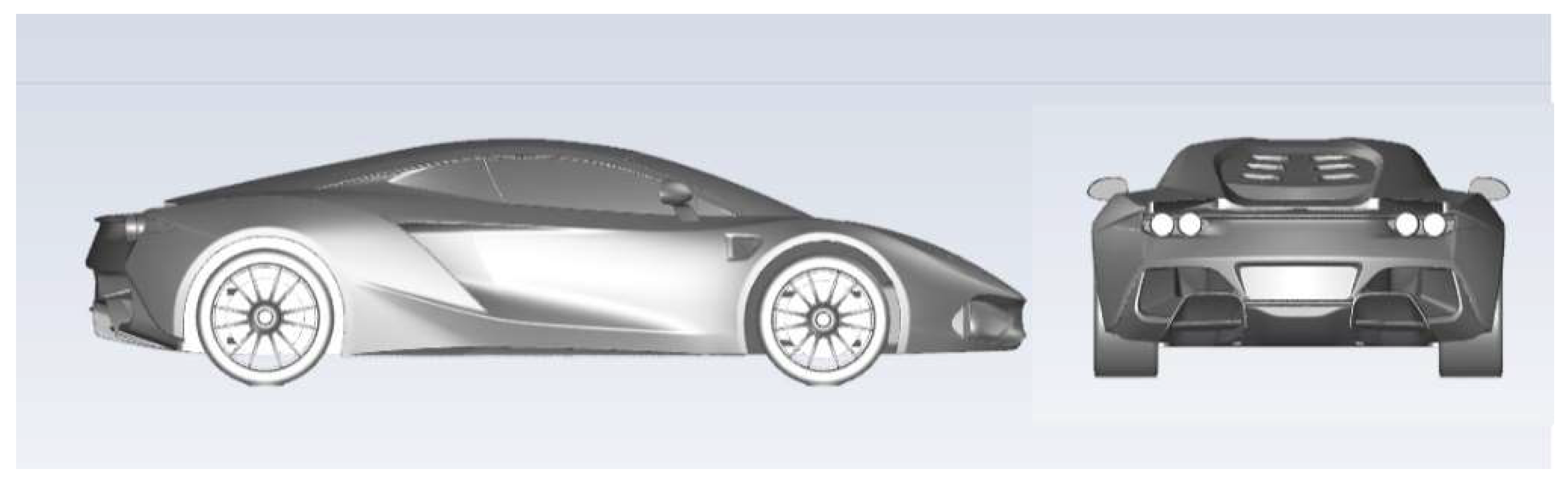
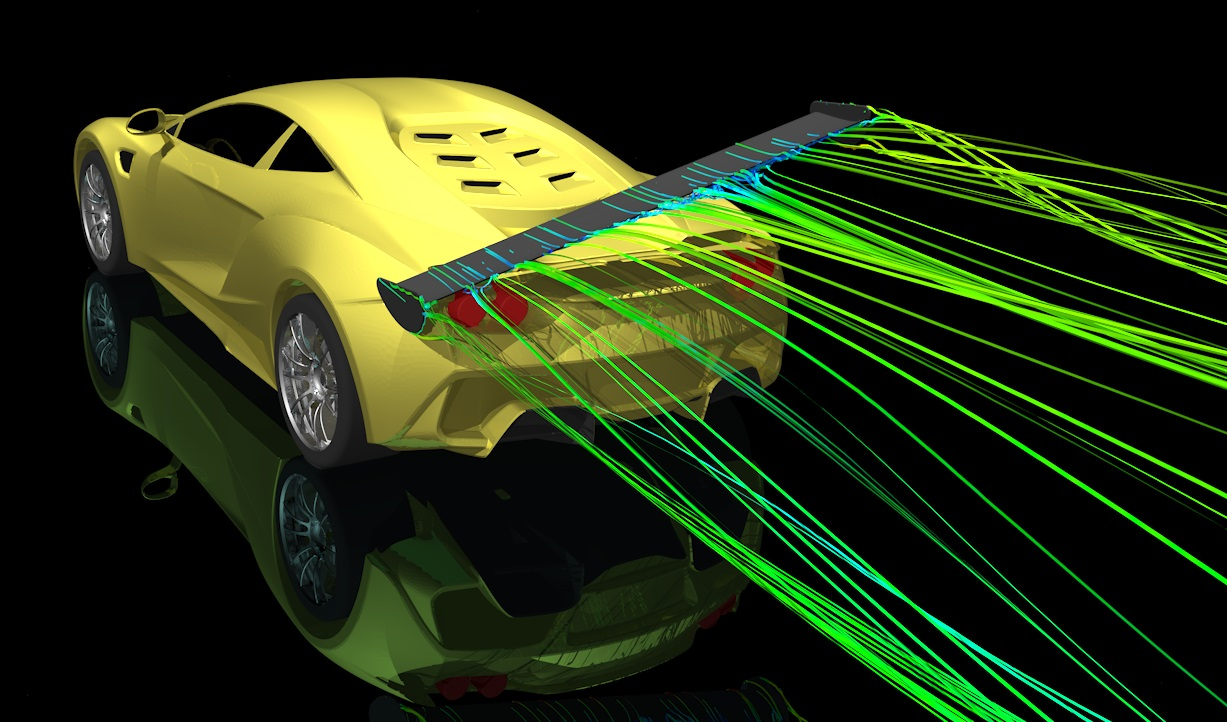
2.1. Object of Study
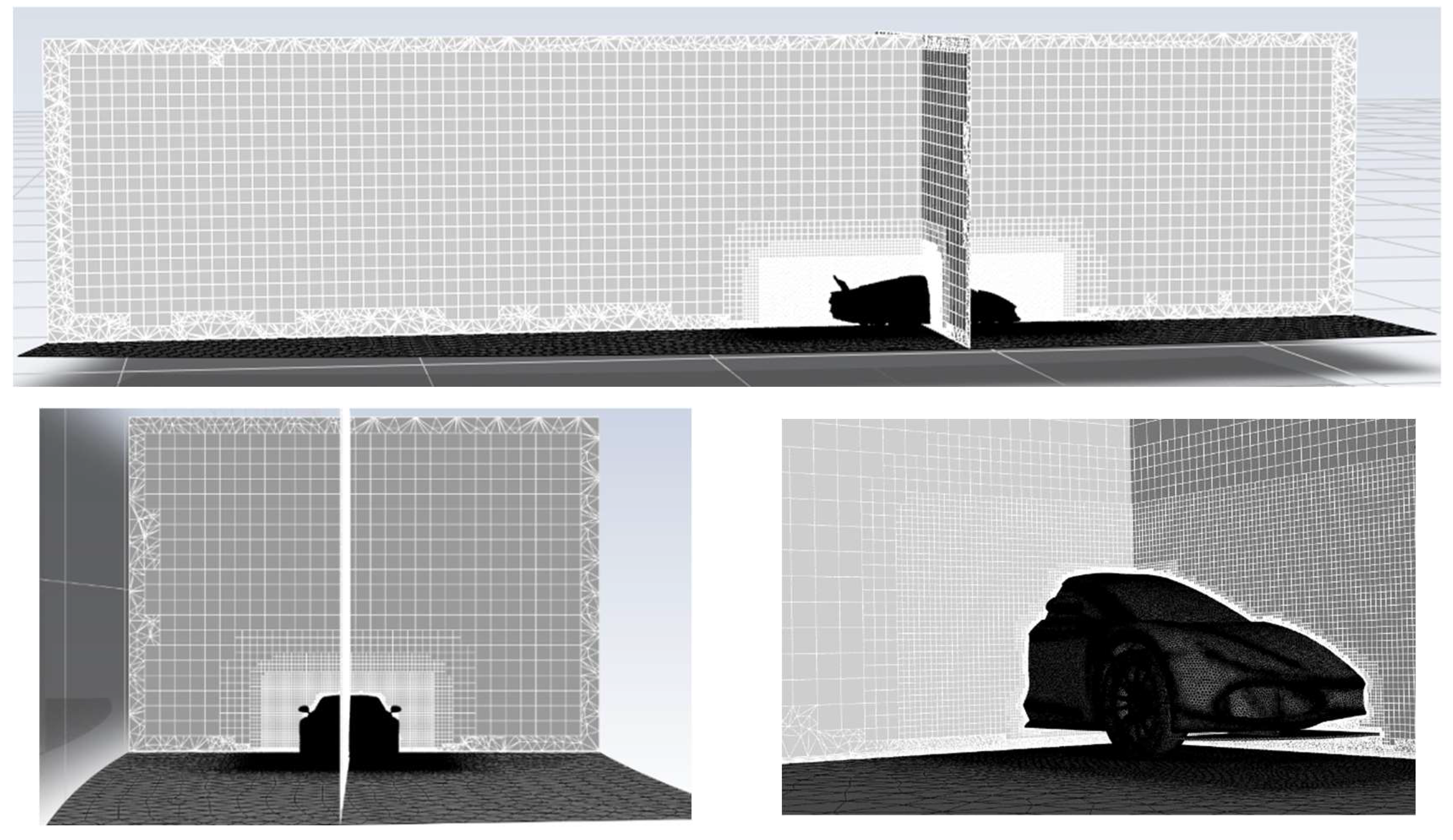
2.2. Simulation Domain and Calculation Method
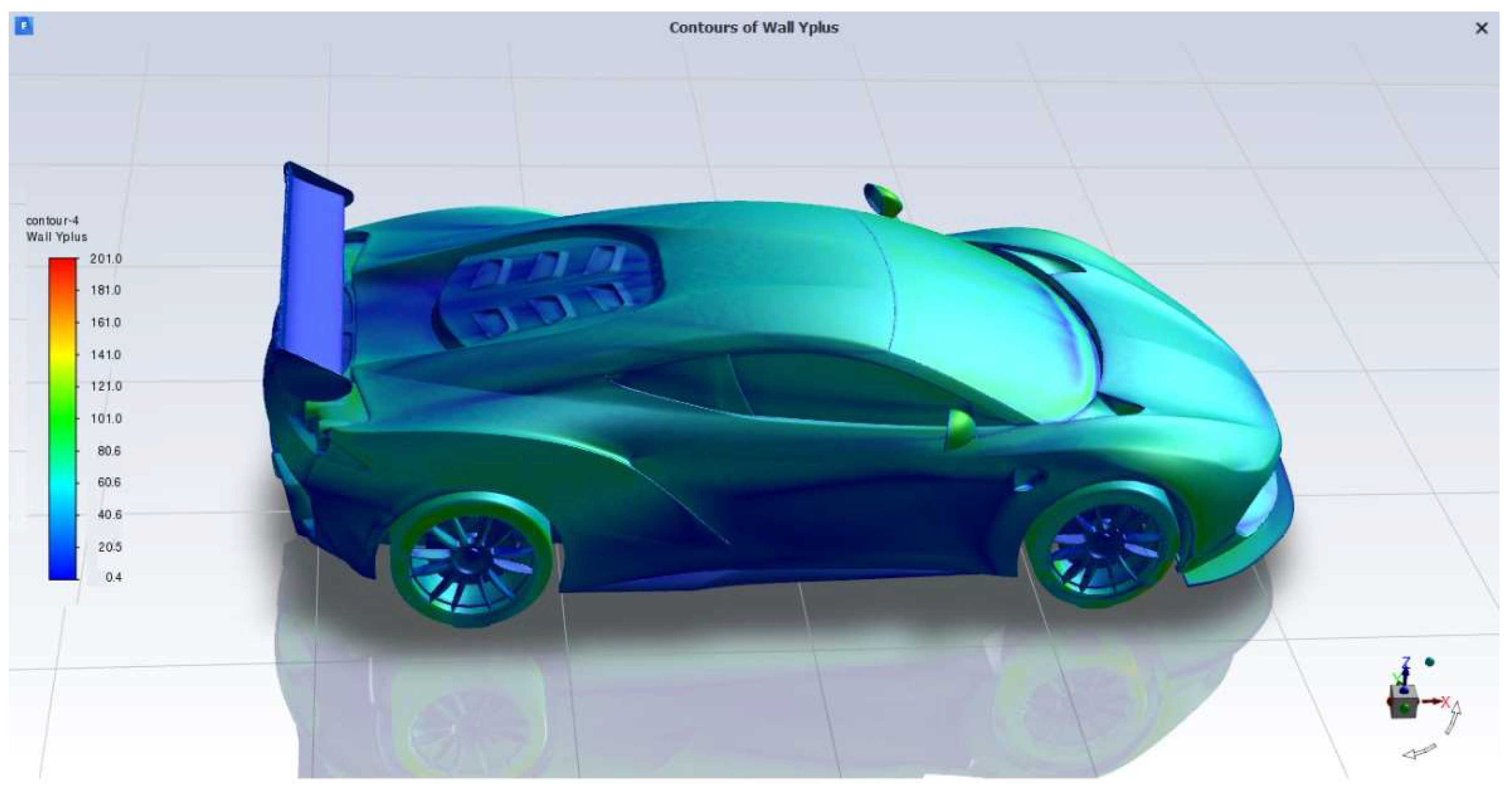
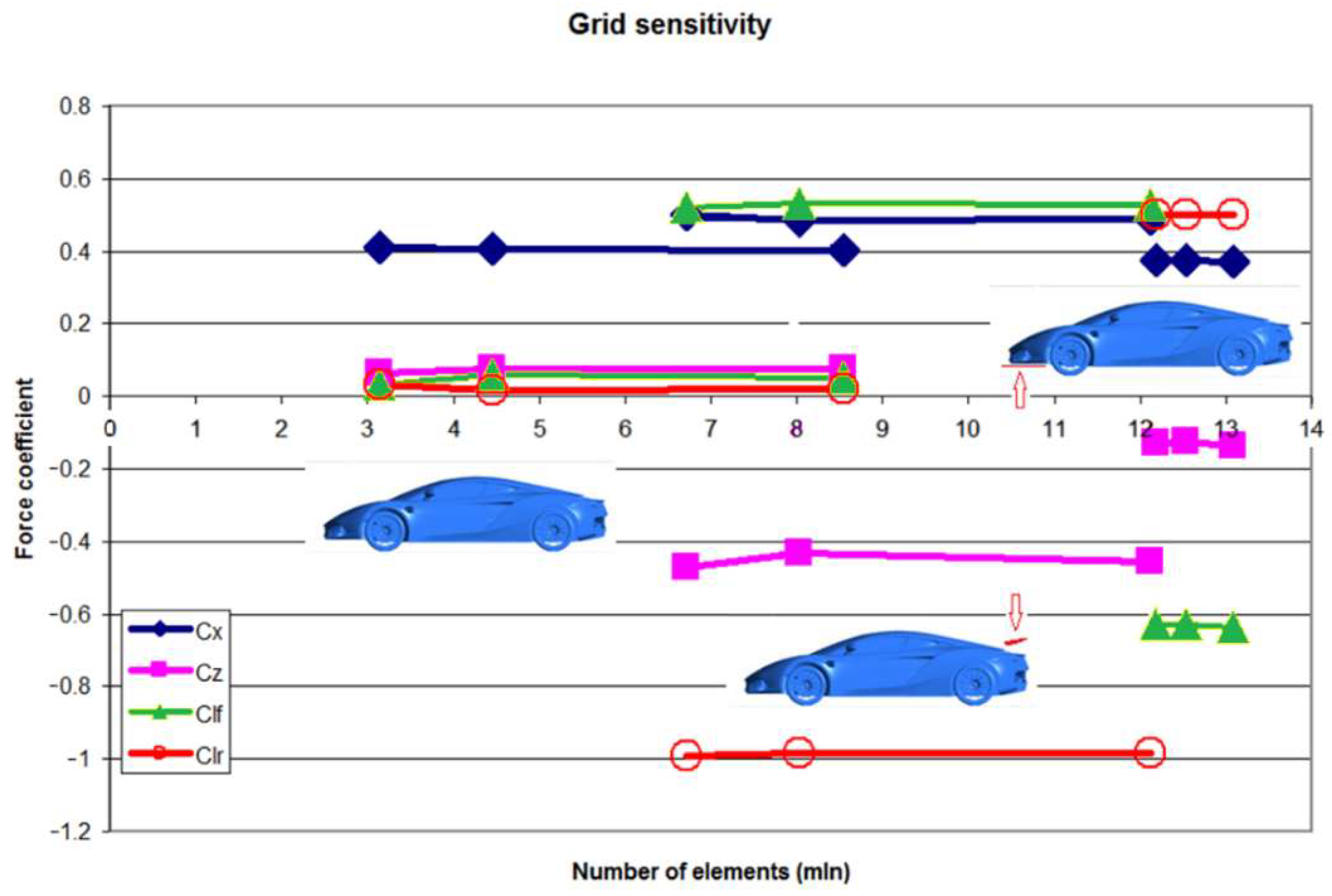
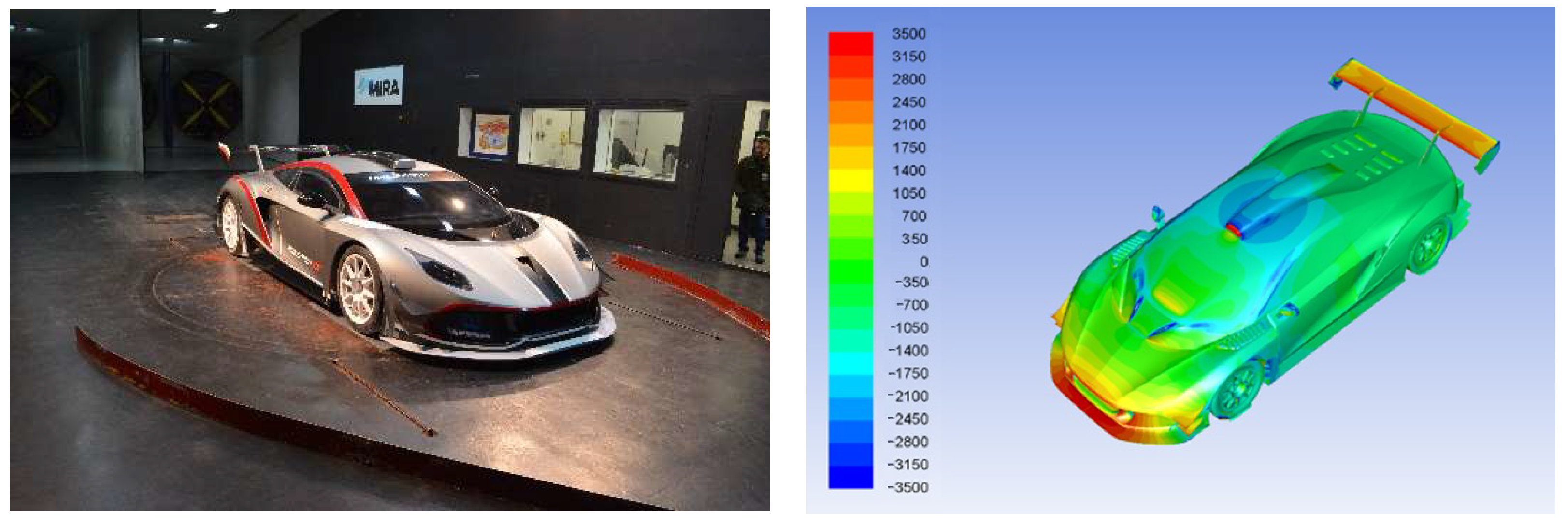
2.3. Validation of the Numerical Model
3. Results and Discussion
3.1. Performance Analysis of Selected Additional Aerodynamic Elements
3.1.1. Additional Booster Plate for a Sports Car
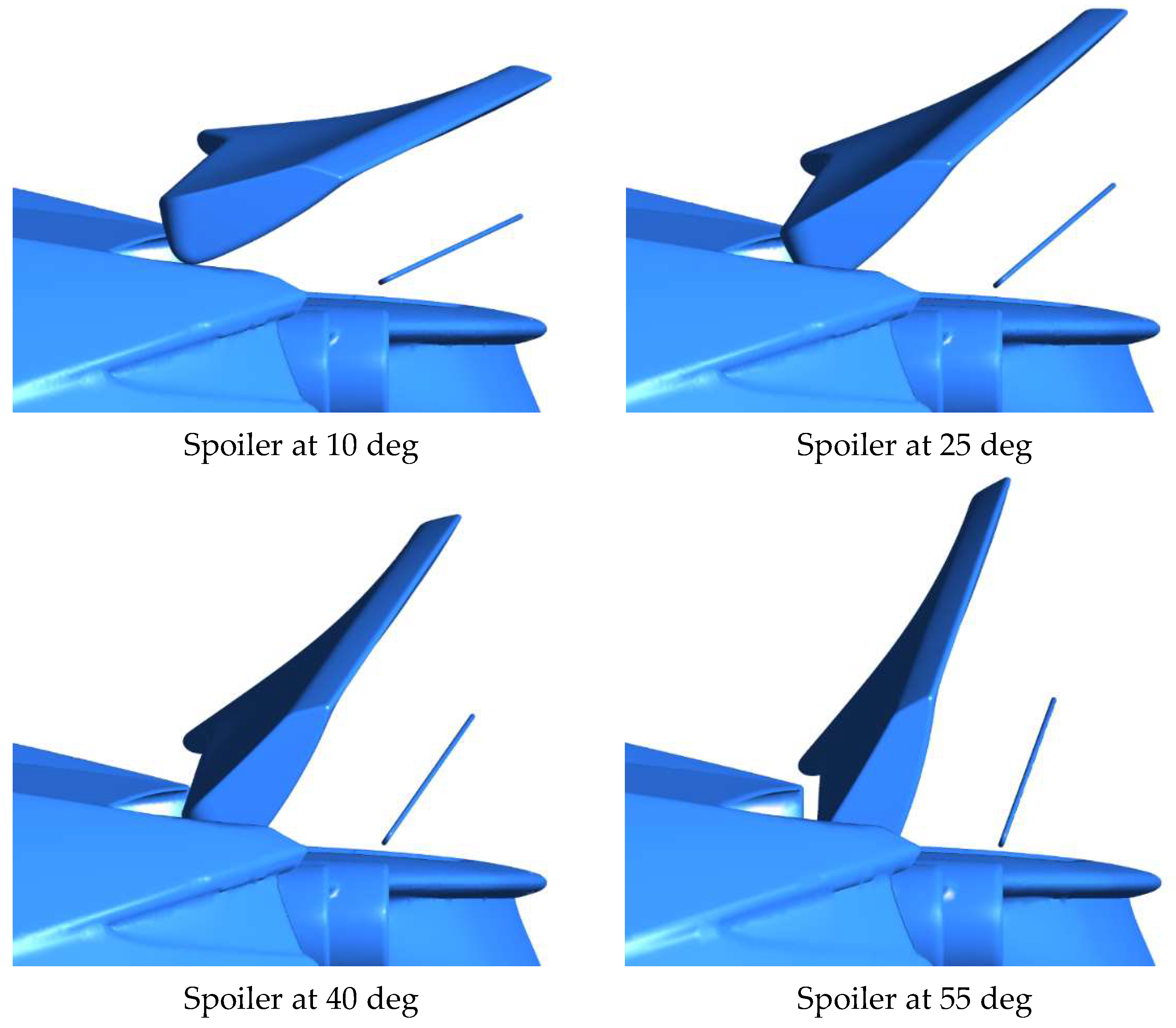
3.1.2. Spoiler with Pull-Out Gurney Flap, 3 cm High
3.1.3. Splitter
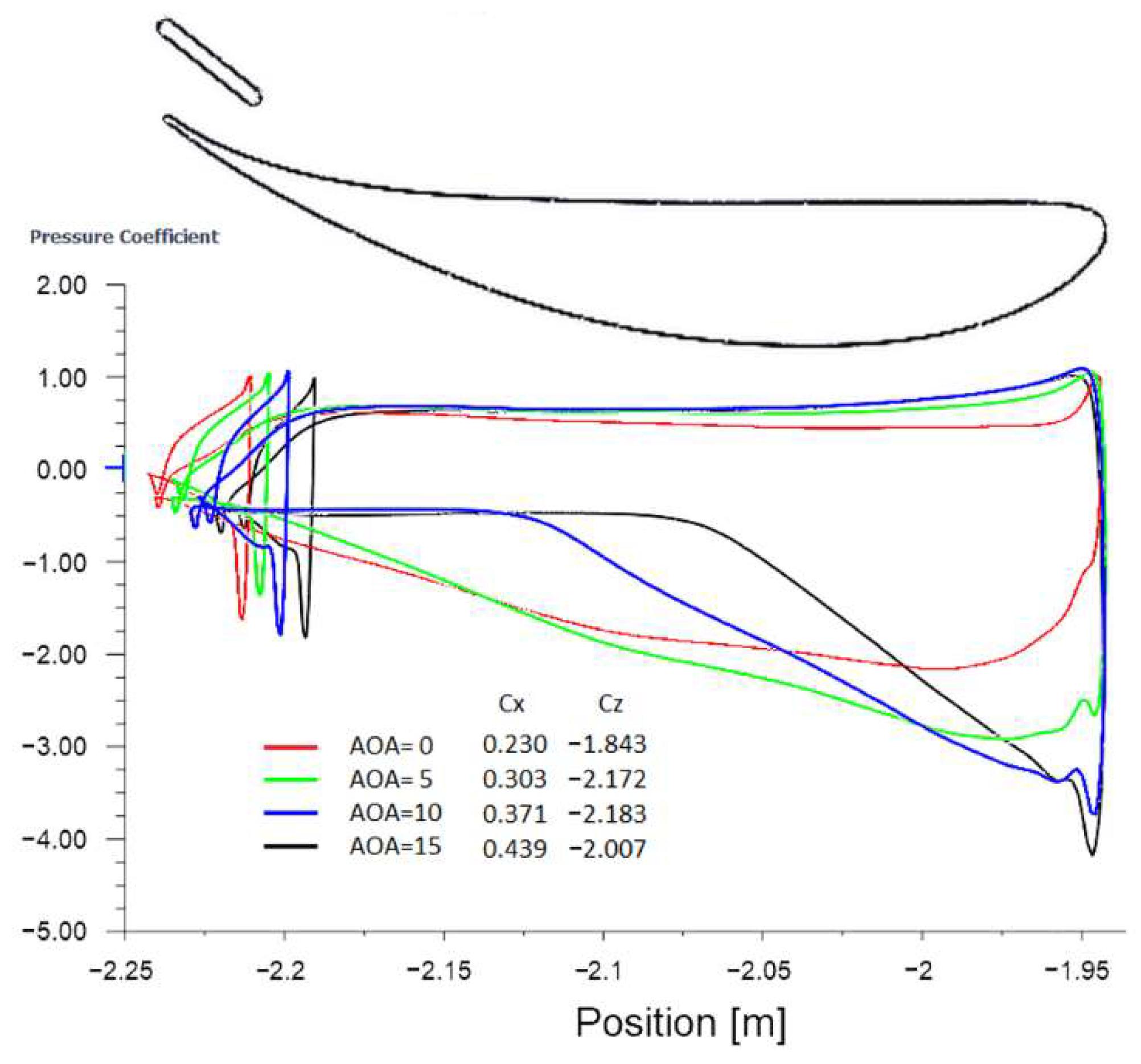
3.1.4. Separated Wing
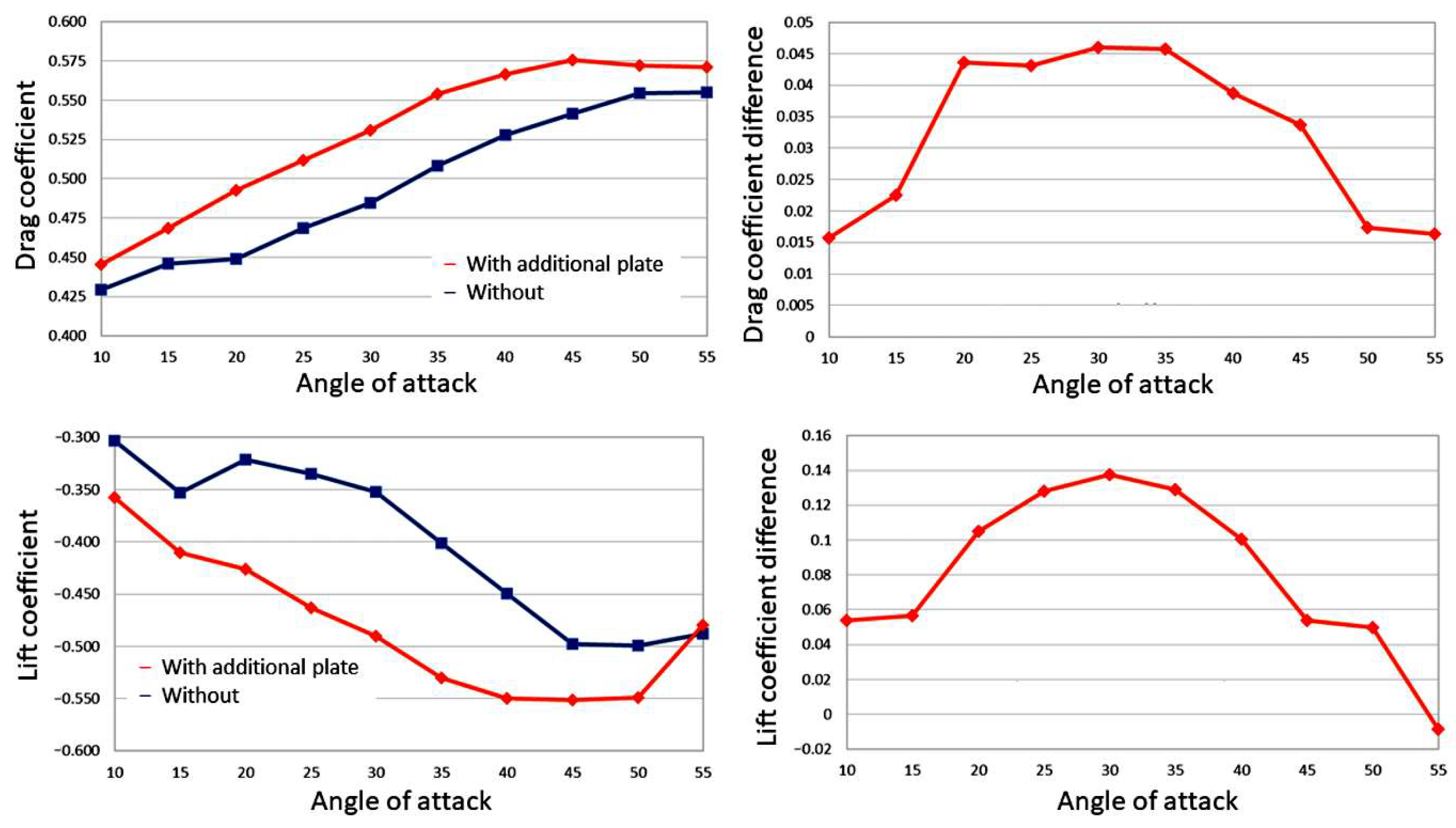
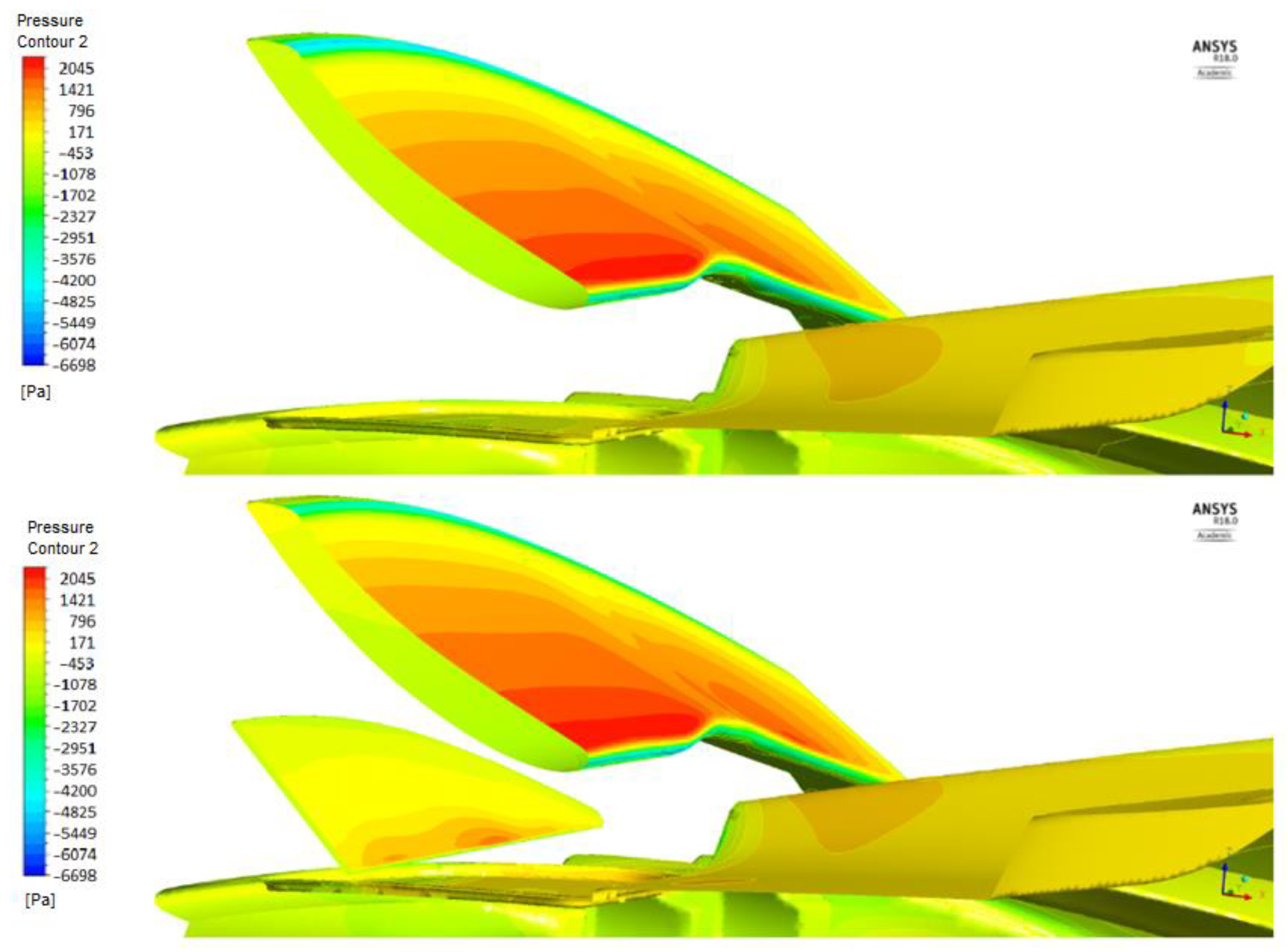
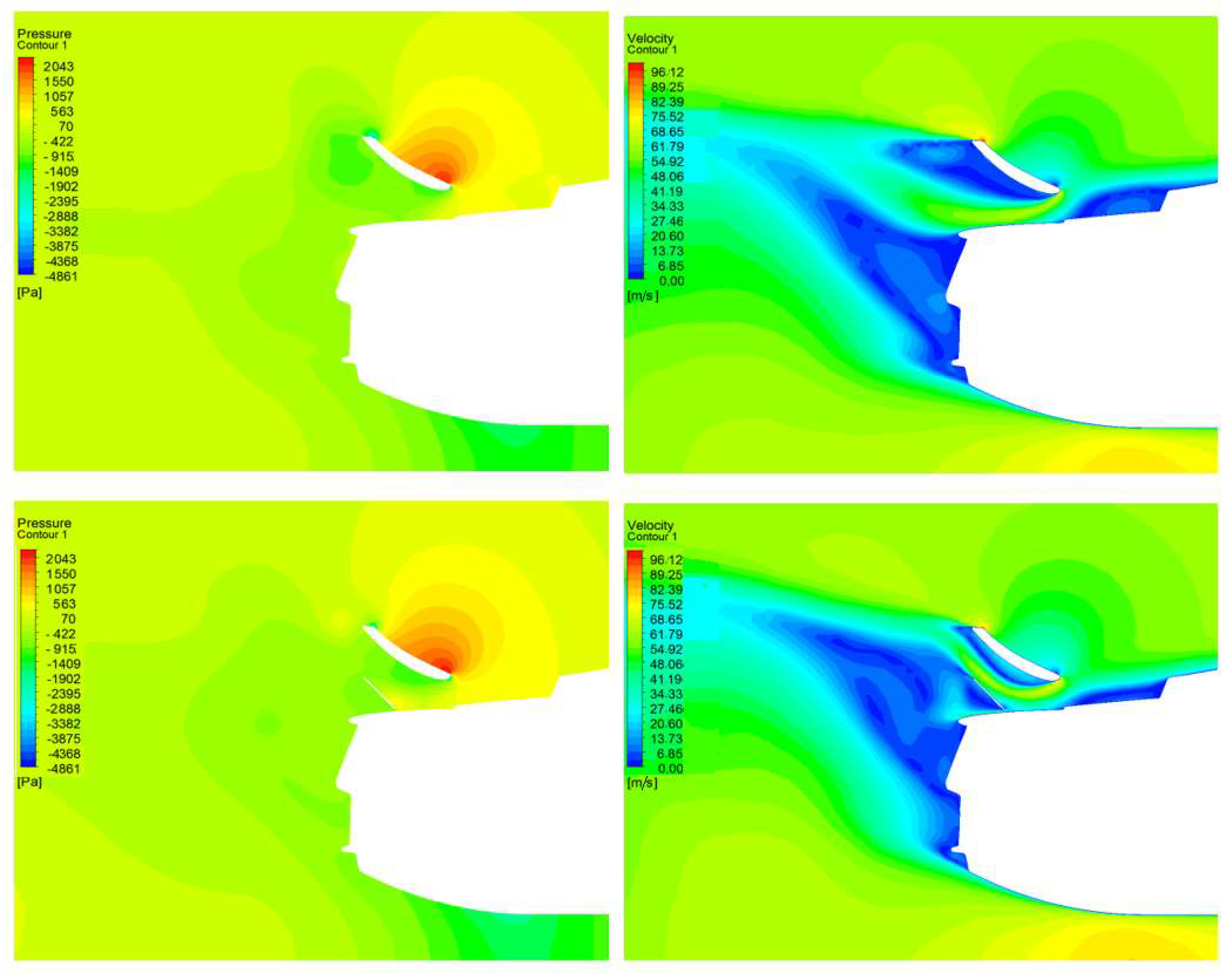
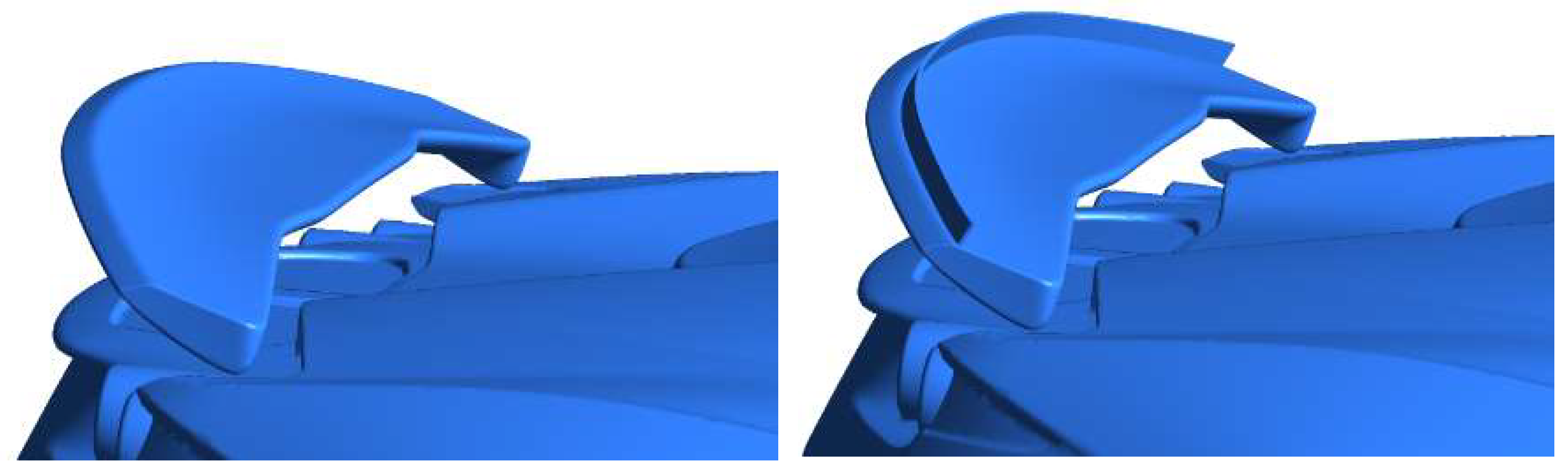
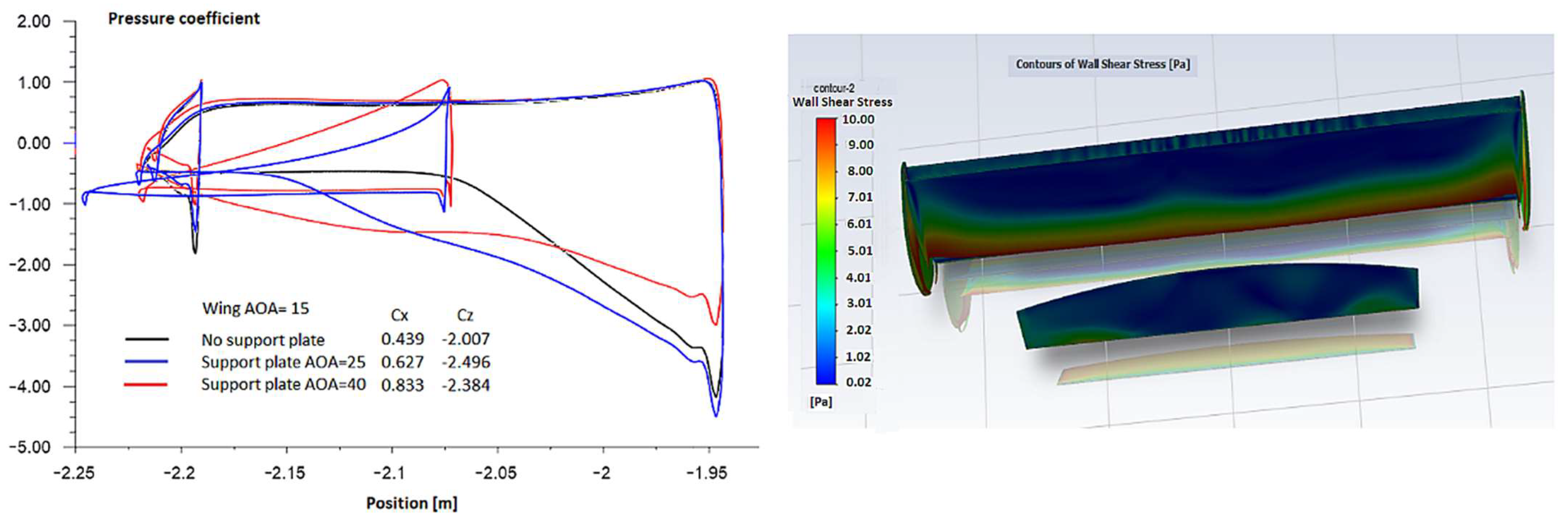
3.1.5. Separate Wing with Supporting Plate
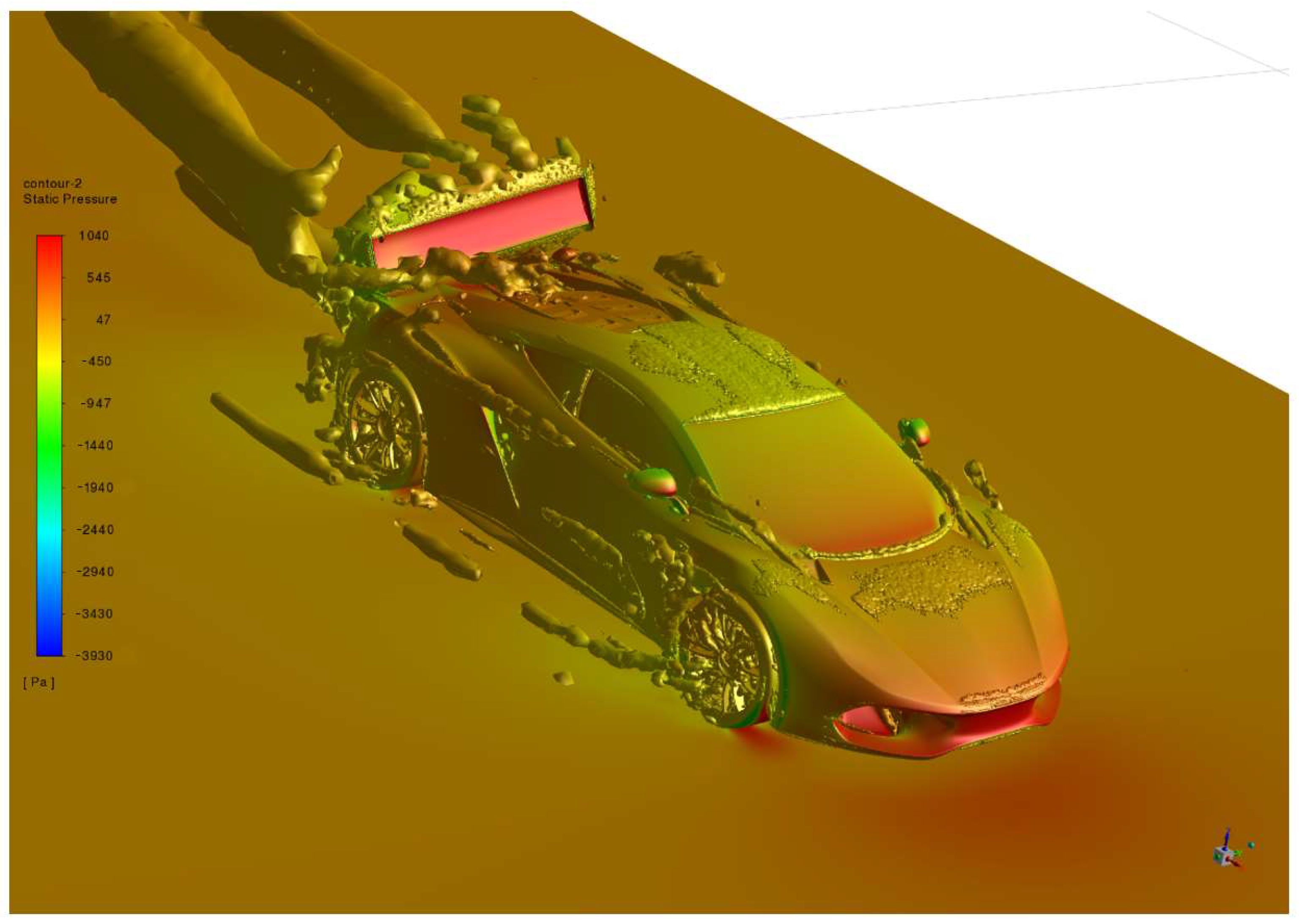
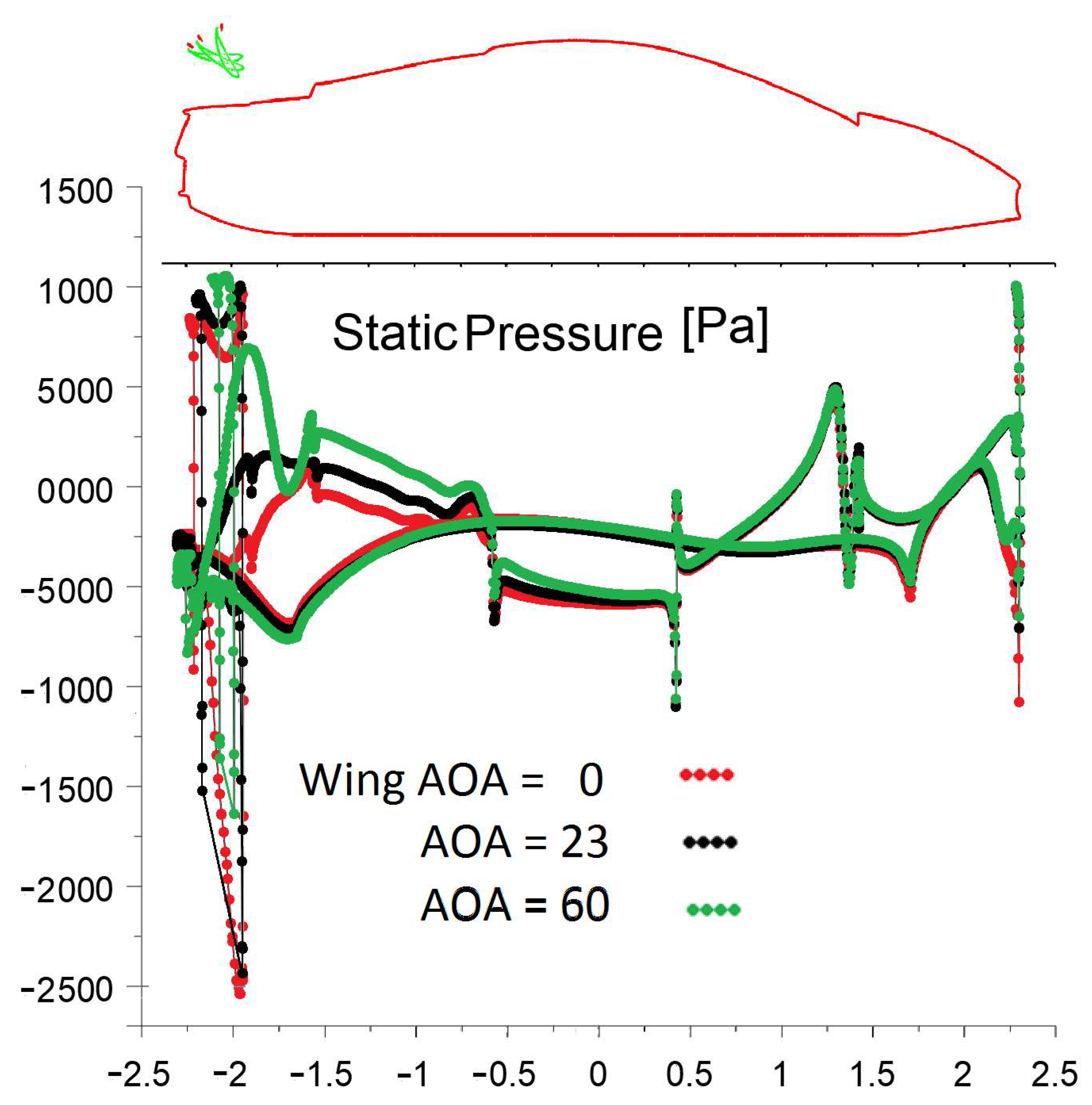
3.1.6. Wing Tilted to One Side
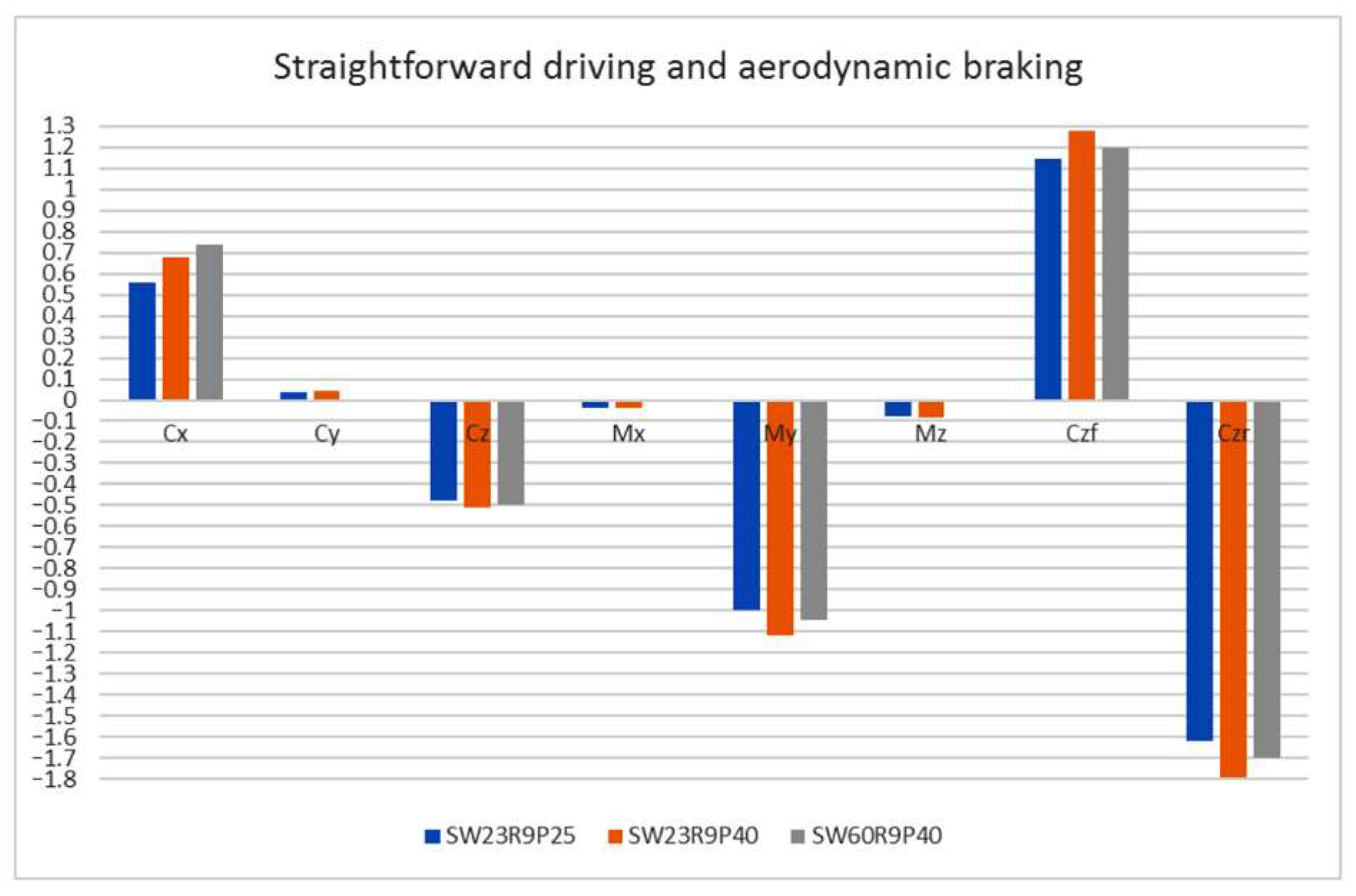
3.1.7. Straightforward Driving and Aerodynamic Braking
3.1.8. Moving Wheels
3.2. Cornering Car
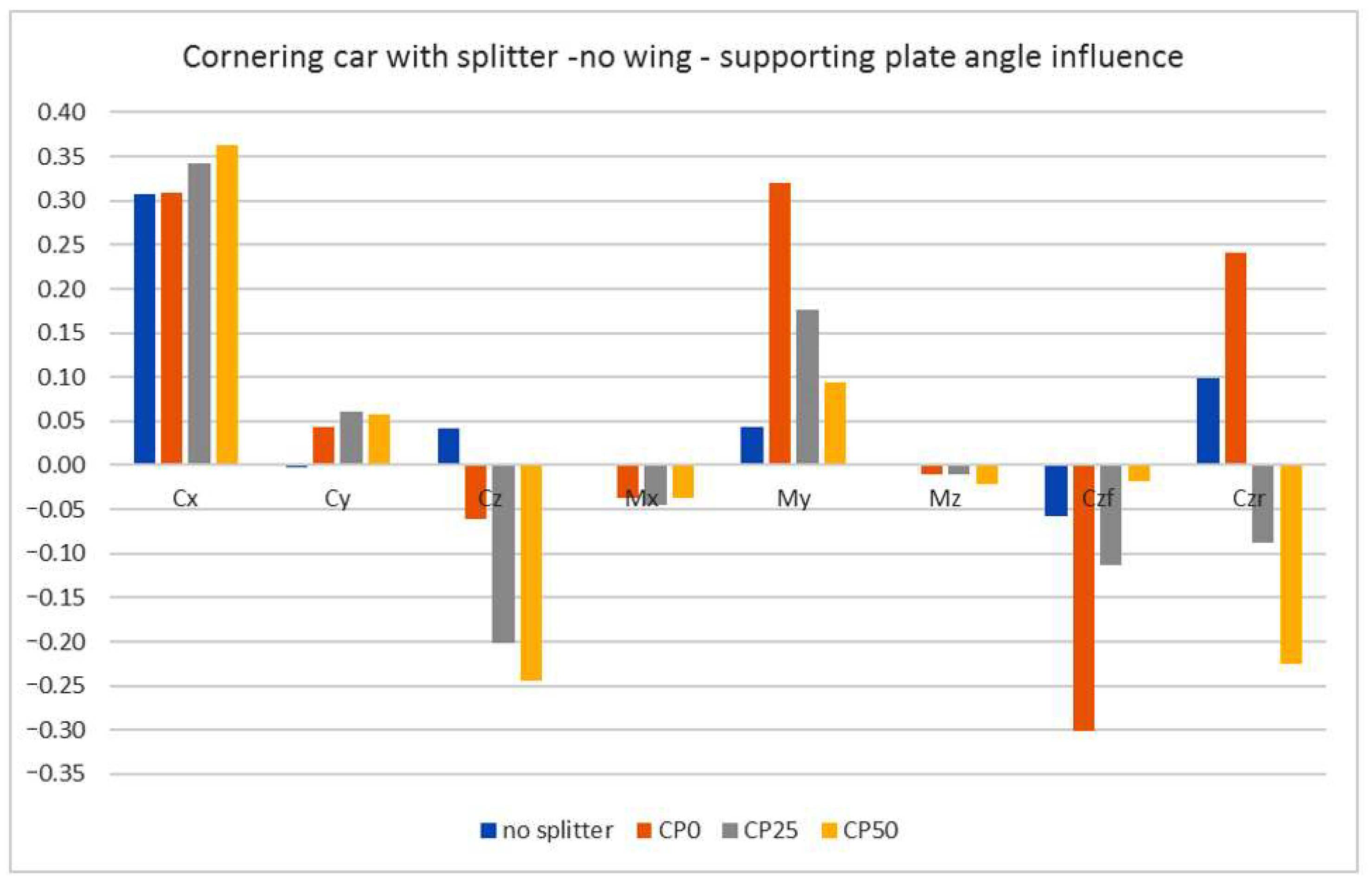
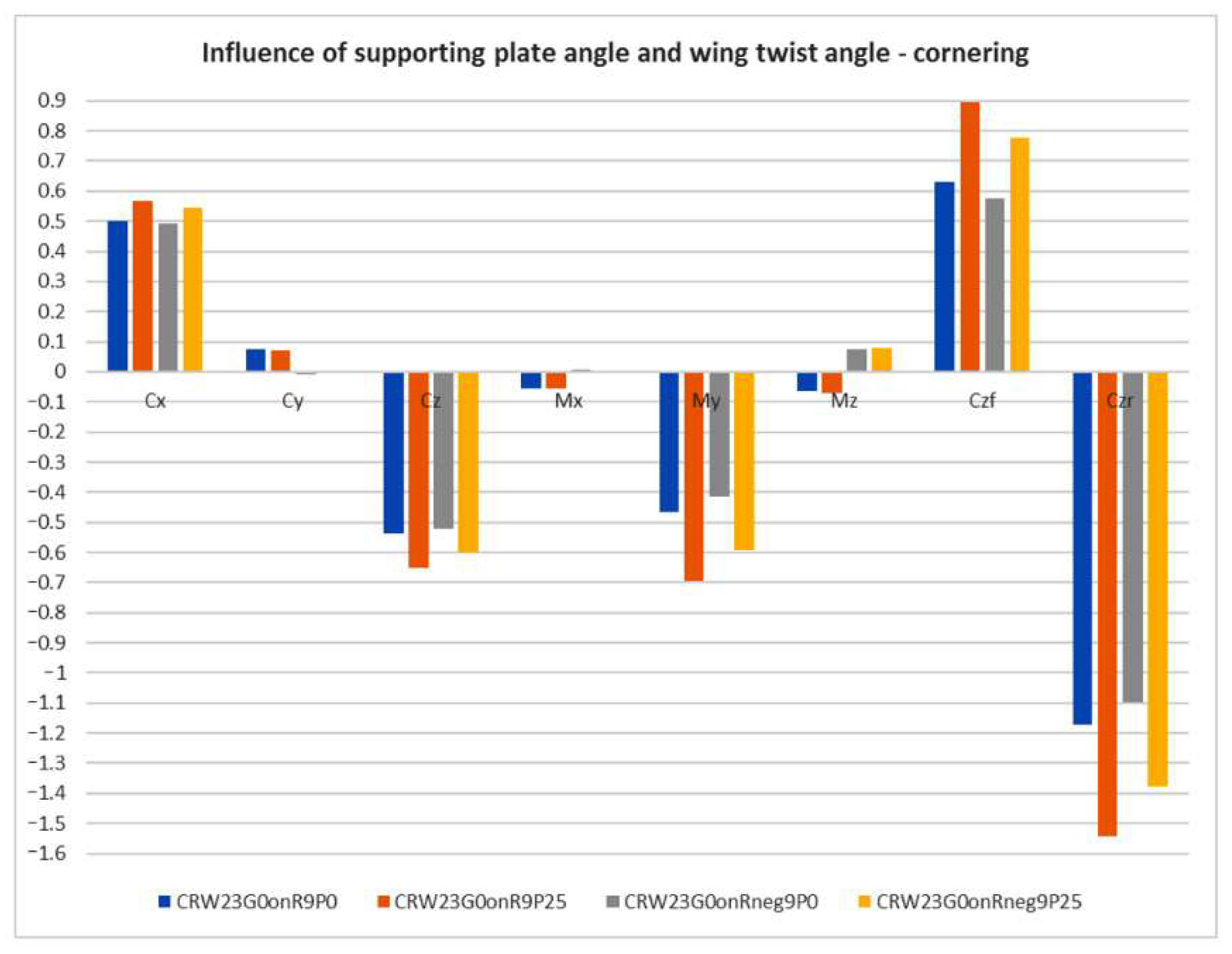
3.2.1. Cornering Car with Booster Plate Only
- Body without manifold;
- Body with distributor and booster plate at 0 angle;
- Body with distributor and booster plate at an angle of 25;
- Body with distributor and booster plate at an angle of 50.
3.2.2. Cornering Car with Inverted Rear Wing
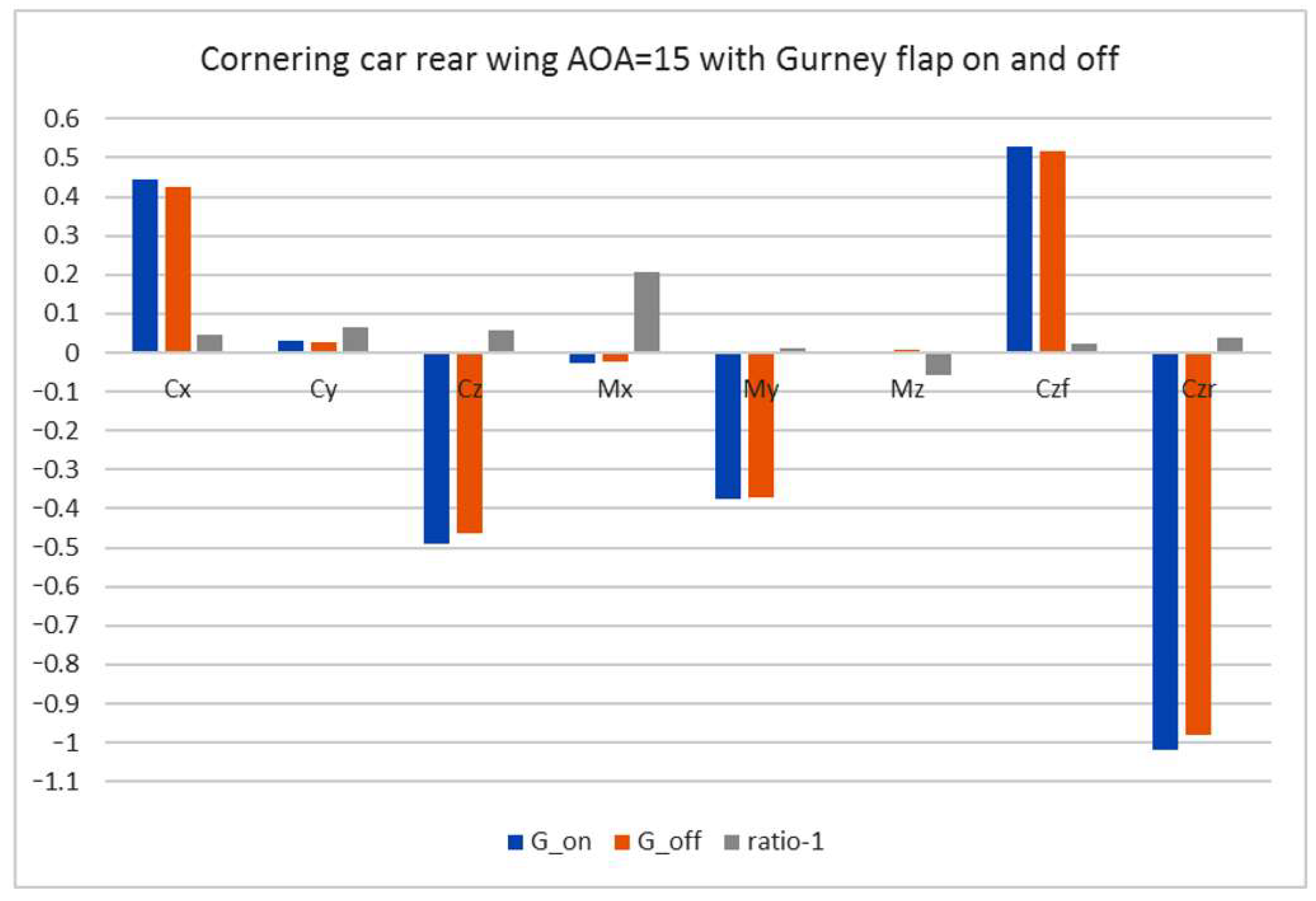
3.2.3. Cornering Car with Inverted Rear Wing and Switchable Gurney Flap
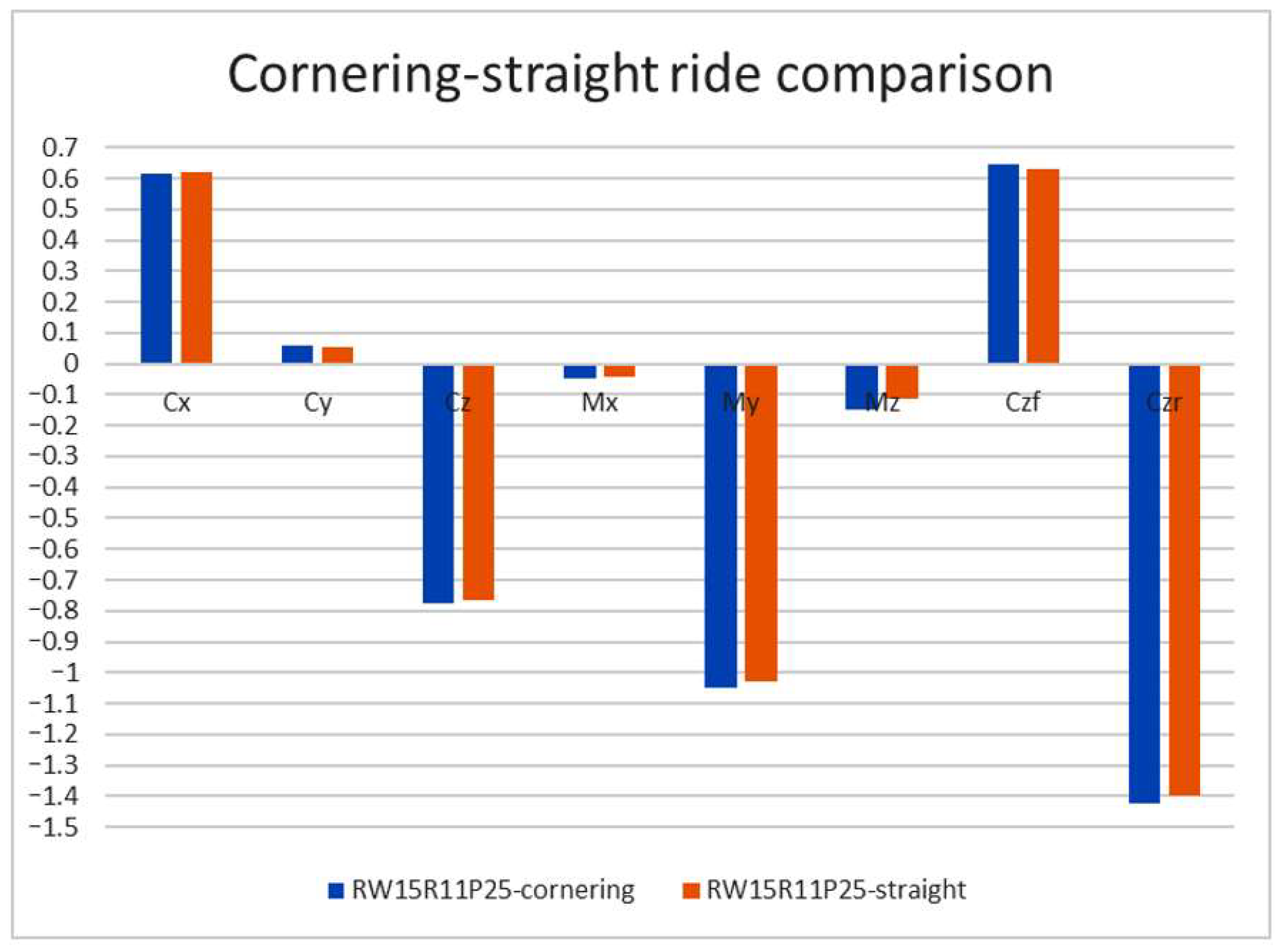
3.2.4. Comparison of Straight and Curved Driving
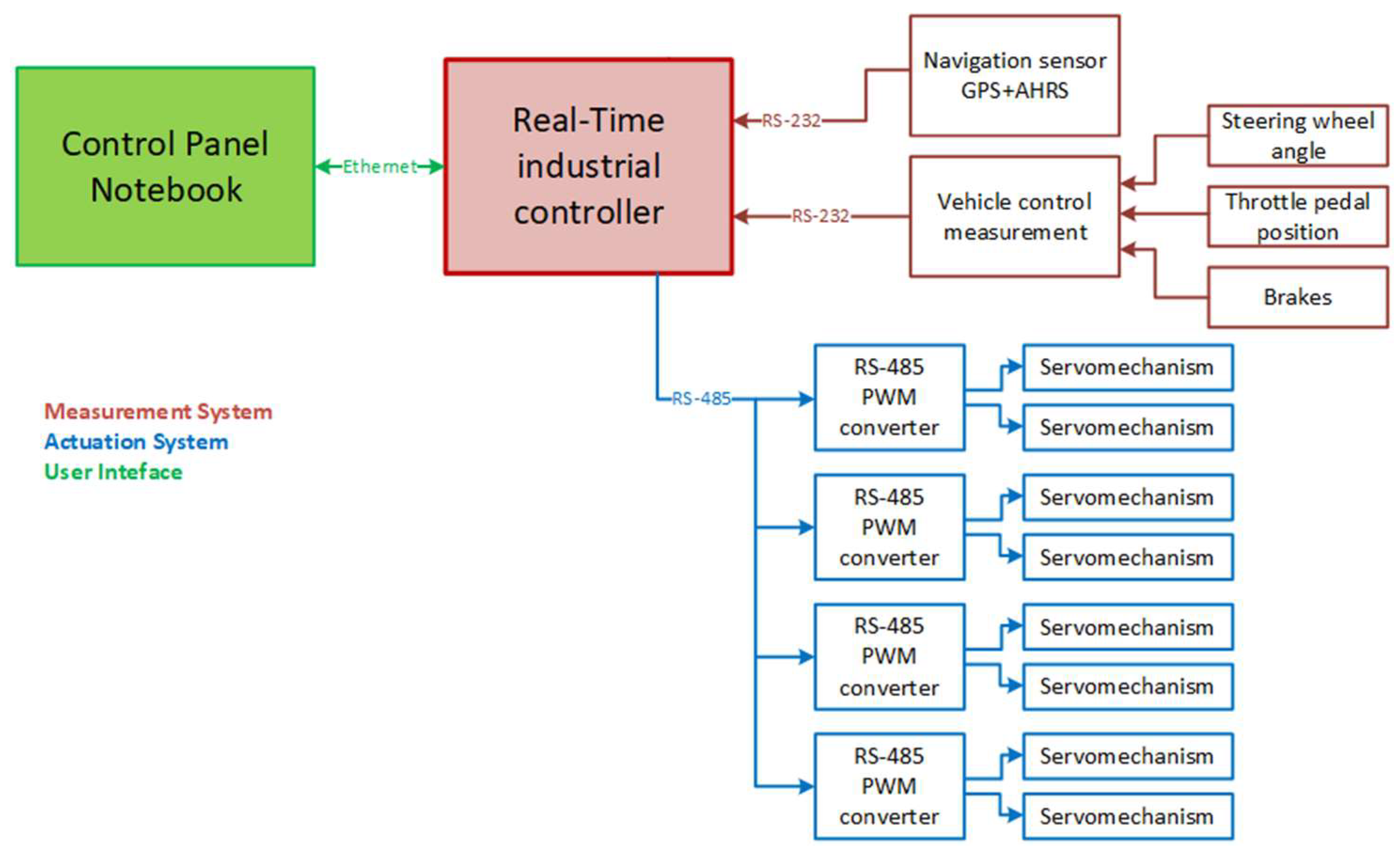
4. An Automated System for Vehicle Dynamic Data Acquisition and Control of Moving Aerodynamic Components
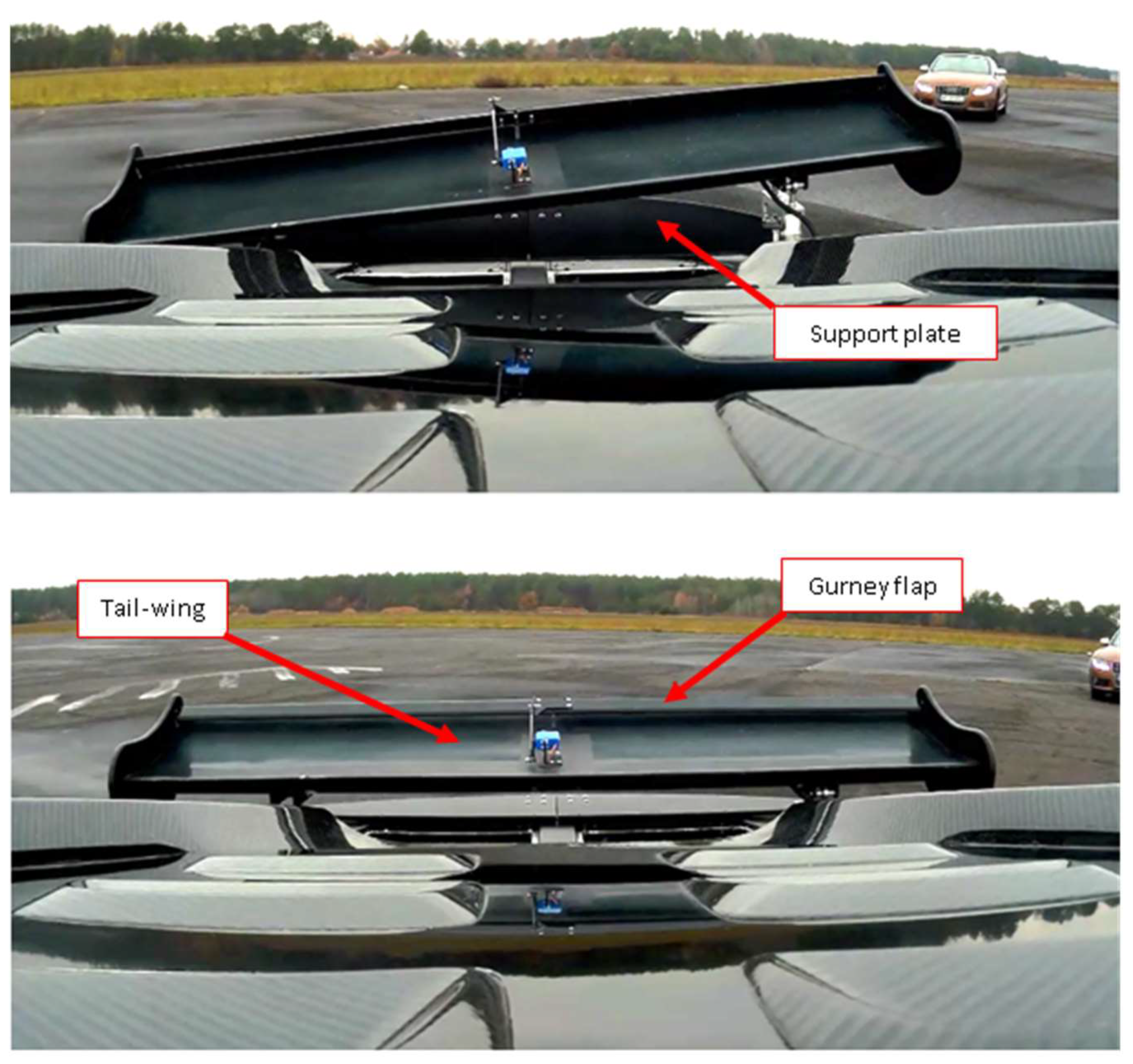
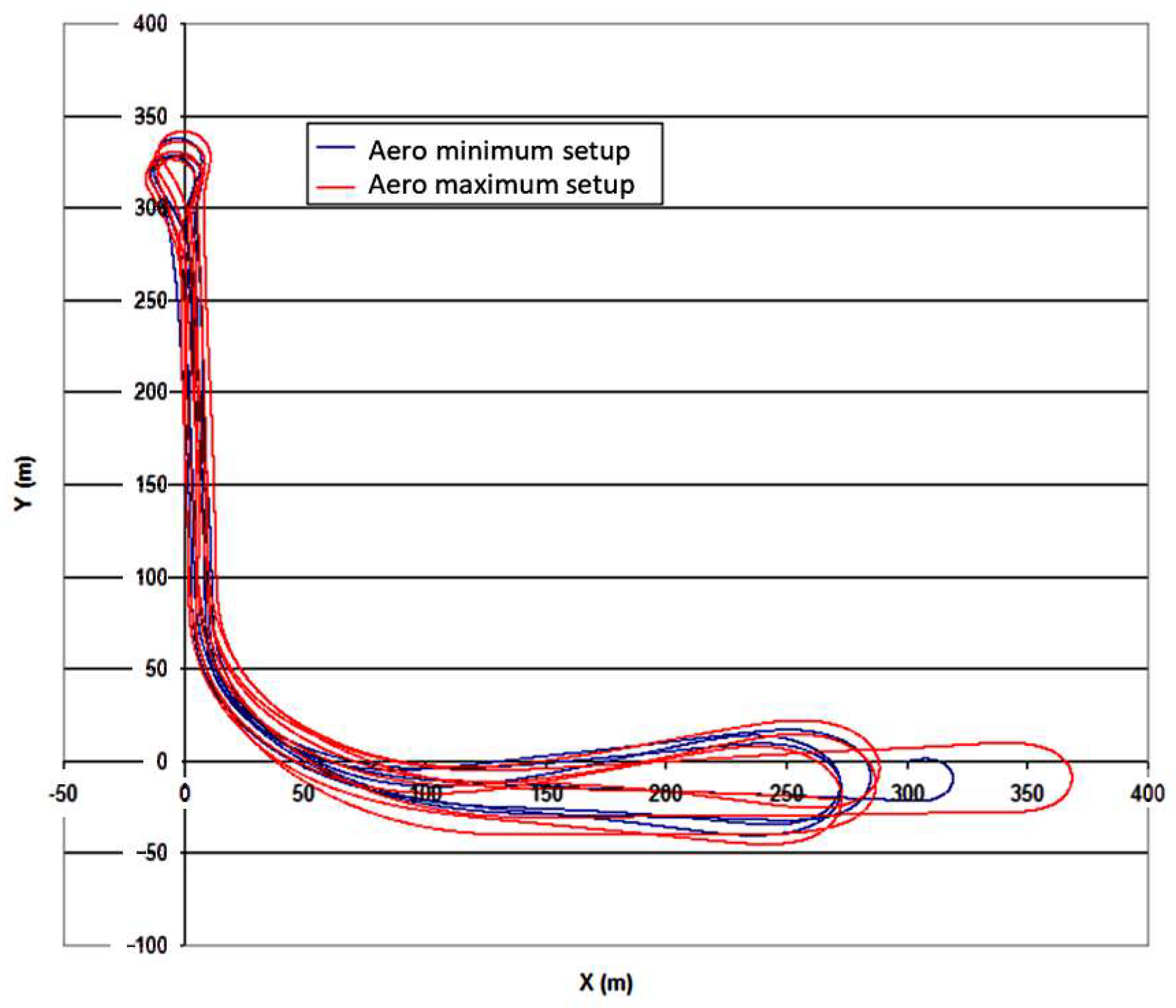
5. Vehicle Investigation at Runway
- Accelerating the vehicle on the narrow access road to the runway;
- Making a left turn on the airport runway;
- Braking, turning around, and entering the narrow access road;
- Turning around at its end;
- Making another pass.
- Tail-wing horizontal minimum angle of attack;
- Support plate set to 0 (deg);
- Gurney flap off.
- Tail-wing inclined 9 (deg);
- Tail-wing angle of attack 23 (deg);
- Support plate set at 40 tail-wing.
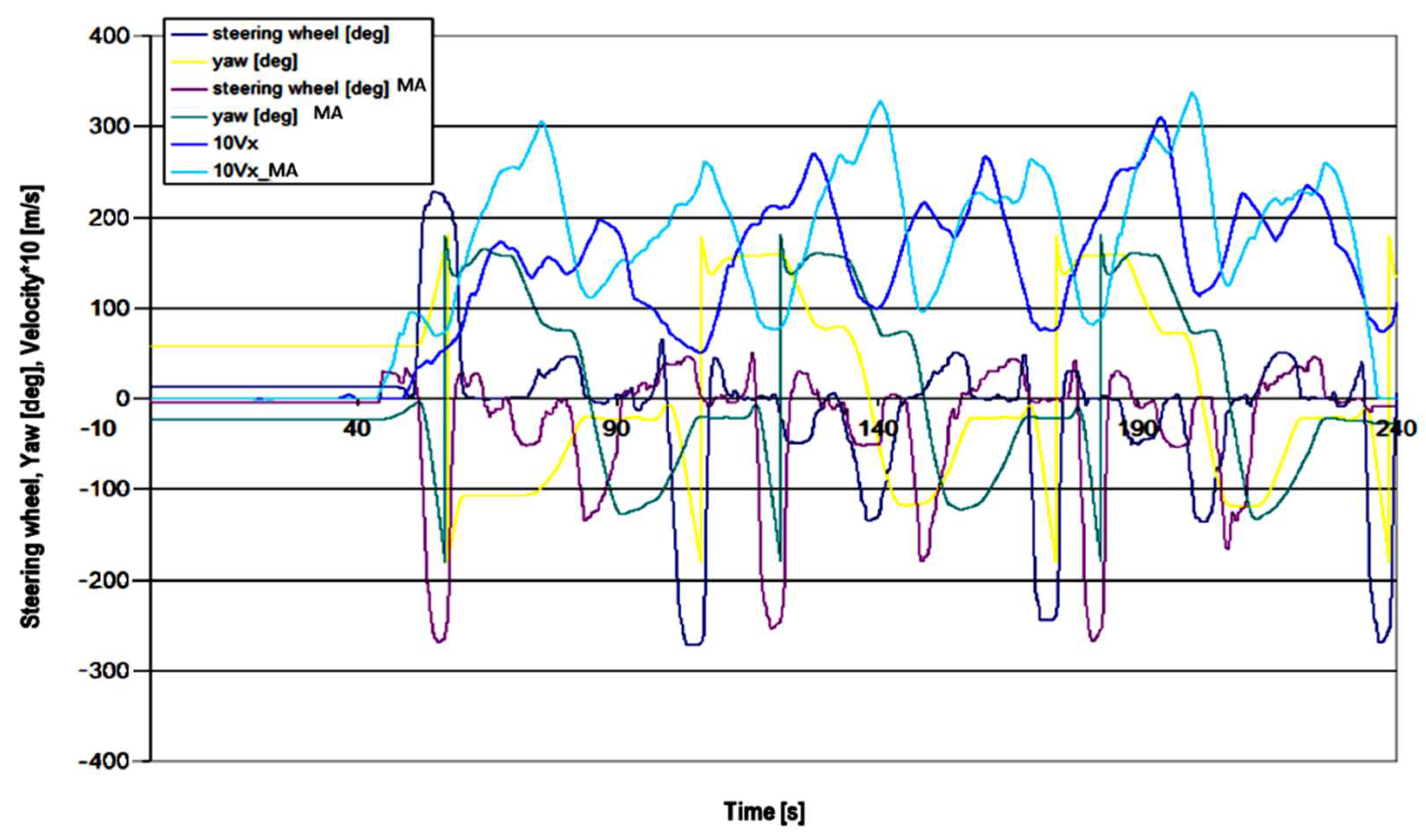
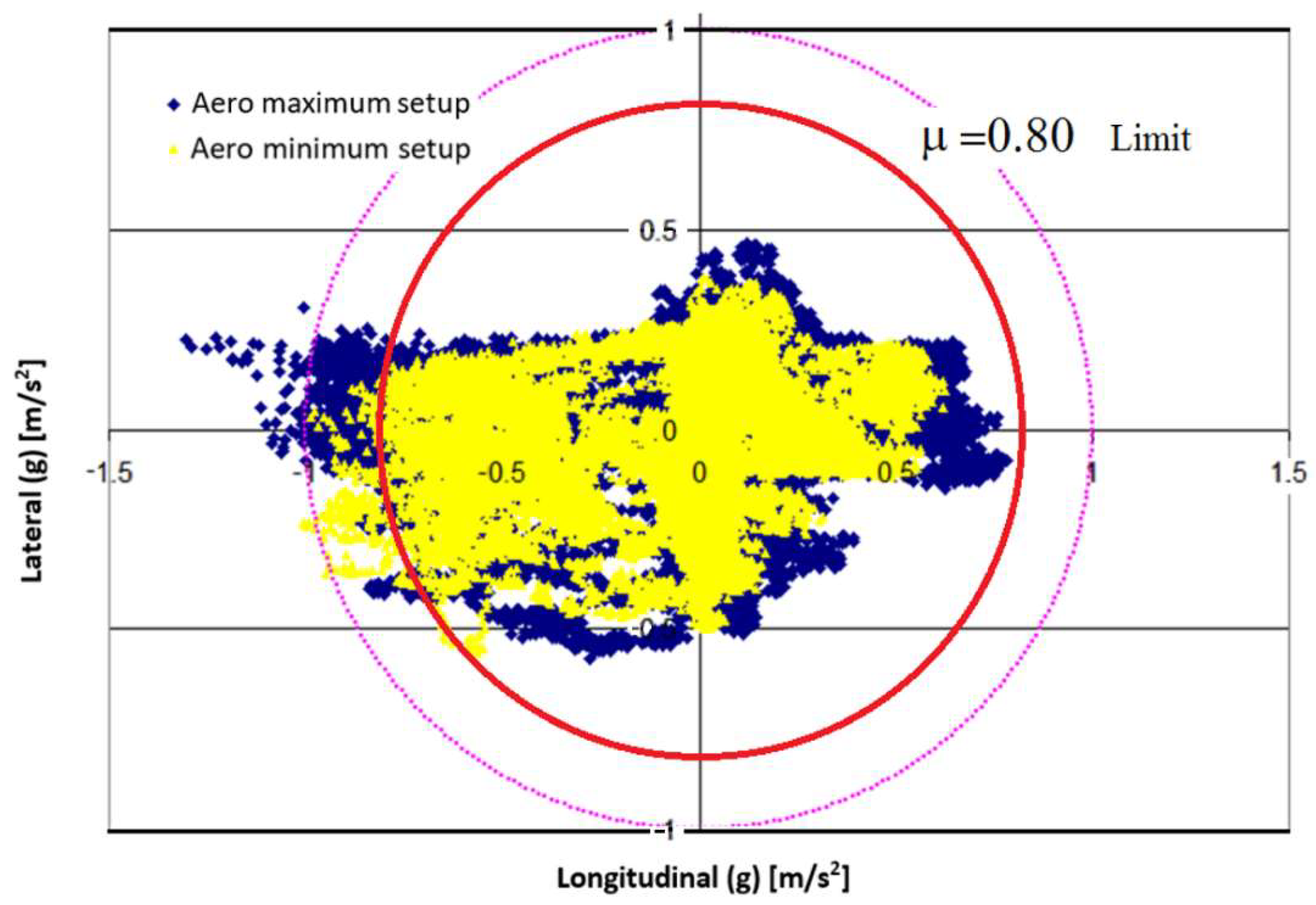
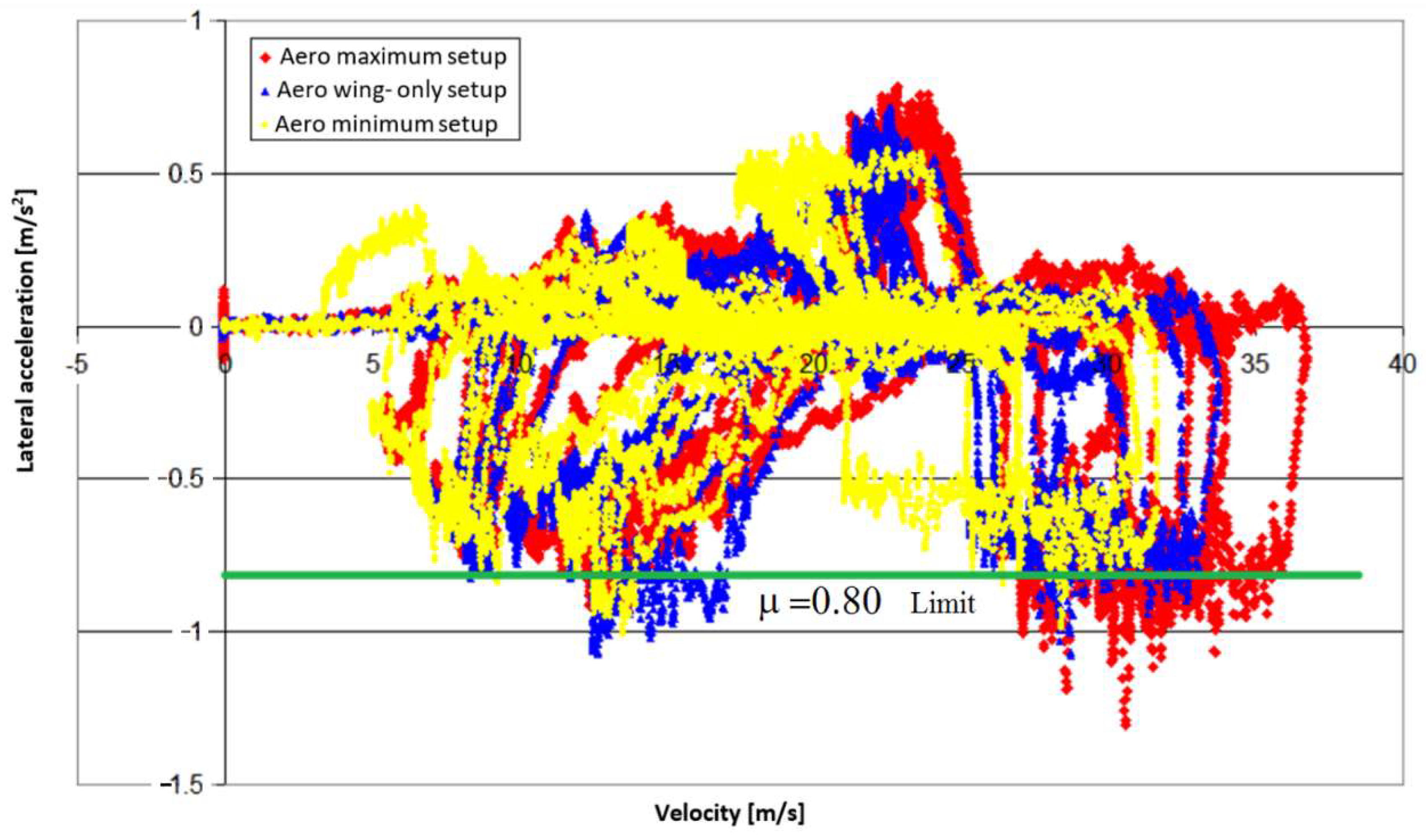
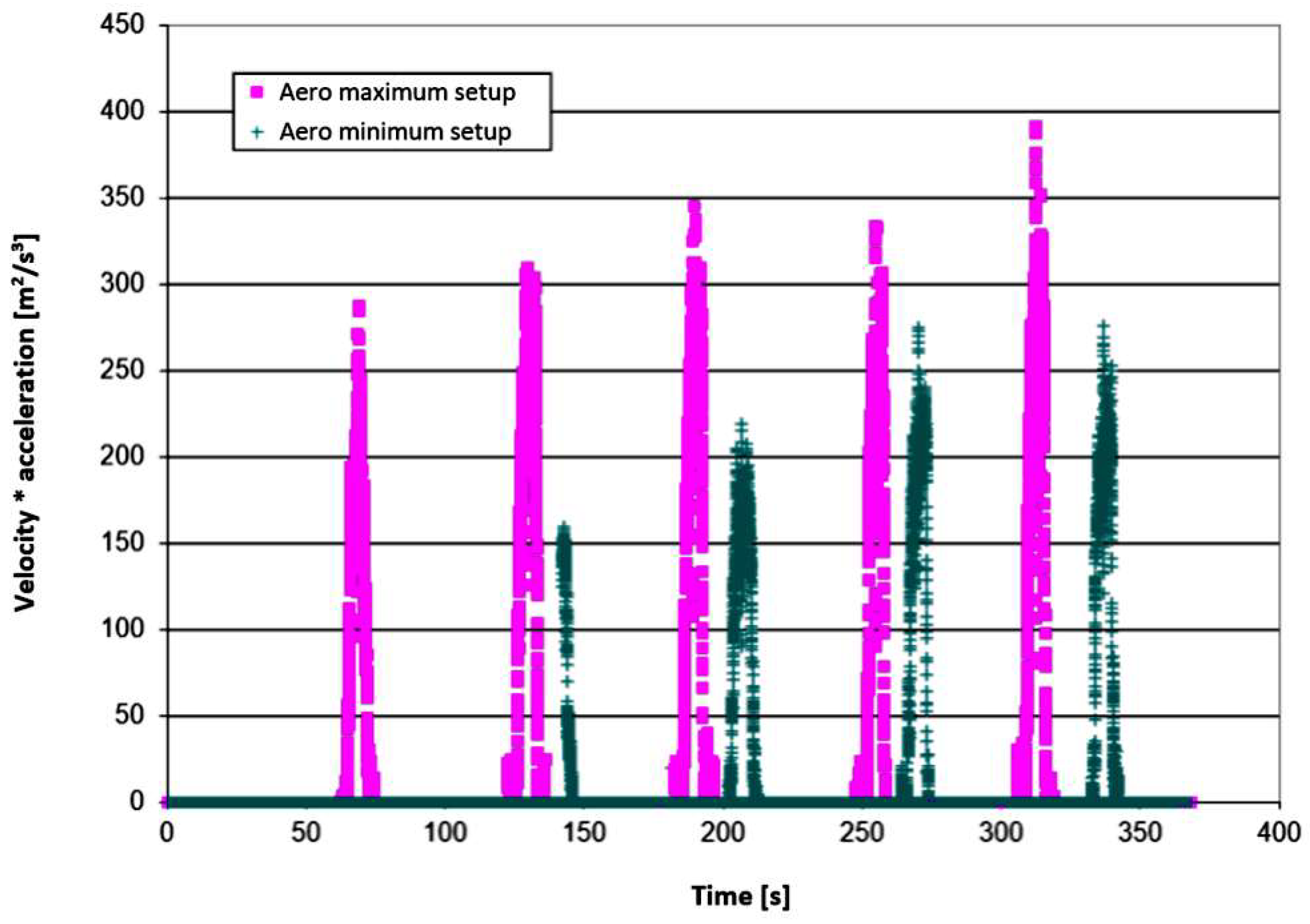
- Aerodynamic elements set to minimum-speed of 31.6 m/s (113.8 km/h)—this is the reference speed;
- Using only the extended wing-speed 33 m/s (118.8 km/h)—increase by 4% in relation to the reference speed;
- Using the wing, under-wing support plate and Gurney flap-speed of 35.8 m/s (128.9 km/h), which is more than a 13% increase in speed relative to the reference speed.
6. Conclusions
- A wing positioned obliquely at the rear of the car body responds poorly to the flow asymmetry caused by the vehicle’s curved motion. The generated lateral force is less than expected. The aerodynamic downforce is slightly reduced.
- A very effective movable aerodynamic element is support (booster) plate placed under the wing, improving its flow and aerodynamic characteristics at high angles of attack. Such a role seems to be fulfilled by the lower wing in the Bugatti Veyron [33].
- Movable aerodynamic elements placed behind the axis of the rear wheels play the role of elements that increase the downforce of the rear wheels but at the same time reduce the downforce of the front wheels.
- The splitter placed under the front part of the body partly balances the car aerodynamically by relieving the pressure on the front axle.
- The data contained in the works [18,19], show that the shortest times on race tracks are obtained for rear axle aerodynamic loads within 55–70% of the total downforce. Movable aerodynamic elements allow dynamic adjustment of this downforce. Large range of rear-wheel downforce changes allows for aerodynamic balancing of dynamic front wheel loading during sudden braking.
- Test drives with the twisted rear wing through a test curve with a radius of 90 m could be performed at a speed of 13% higher than without it. The calculations showed a generation of only slight side force by the twisted rear wing. It, therefore, appears that the increase in speed was due to an increased sense of better wheel grip, mainly due to increased aerodynamic downforce applied to the rear axle rather than the generation of lateral force.
- The computational results showed that it is difficult to obtain significant aerodynamic downforce for the front axle wheels. The splitter located at the front under the body generates downforce, but its magnitude depends on its surface area.
- Movable aerodynamic elements can change the aerodynamic characteristics of a car within a wide range, but they can be most effective when coupled to a GPS system with a programmed route, which would enable their predictive actuation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Keogh, J.; Barber, T.; Diasinos, S.; Doig, G. Techniques for Aerodynamic Analysis of Cornering Vehicles. SAE Technical Paper 2015-01-0022. In Proceedings of the 18th Asia Pacific Automotive Engineering Conference, Melbourne, Australia, 10–12 March 2015. [Google Scholar] [CrossRef]
- Keogh, J.; Barber, T.; Diasinos, S.; Graham Doig, G. A New Type of Wind Tunnel for the Evaluation of Curved Motion. Available online: https://www.researchgate.net/publication/310330442_ (accessed on 30 October 2021).
- Nakashima, T.; Mutsuda, H.; Kanehira, T.; Tsubokura, M. Fluid-Dynamic Force Measurement of Ahmed Model in Steady -State Cornering 3. Energies 2020, 13, 6592. [Google Scholar] [CrossRef]
- Nakashima, T.; Tsubokura, M.; Okada, Y.; Nouzawa, T.; Kono, R.; Doi, Y. Aerodynamic Characteristics of a Road Vehicle in Steady State Cornering. In Proceedings of the ASME-JSME-KSME 2015 Joint Fluids Engineering Conference AJKFluids2015, Seoul, Korea, 26–31 July 2015. AJKFluids2015-17553. [Google Scholar]
- Okada, Y.; Nakashima, T.; Tsubokura, M.; Morikawa, Y.; Kouno, R.; Okamoto, S.; Matsuhiro, T.; Nouzawa, T. Aerodynamics Evaluation of Road Vehicles in Dynamic Maneuvering. SAE Technical Paper 2016-01-1618. In Proceedings of the SAE 2016 World Congress and Exhibition, Detroit, MI, USA, 12–14 April 2016. [Google Scholar] [CrossRef]
- Patel, D.; Garmory, A.; Passmore, M. The Effect ofCornering on the Aerodynamics of a Multi-Element Wing in Ground Effect. Fluids 2021, 6, 3. [Google Scholar] [CrossRef]
- Nara, K.; Tsubokura, M.; Ikeda, J.; Fasel, U.; Takemoto, T.; Nakashima, T.; Yoshihiro Sasaki, Y. Numerical Analysis of Unsteady Aerodynamics of Formula Car during Dynamic Cornering Motion. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- Watanabe, K.; Matsuno, K. Moving computational domain method and its application to flow around a high-speed car passing through a hairpin curve. J. Comput. Sci. Technol. 2009, 3, 449–459. [Google Scholar] [CrossRef] [Green Version]
- Josefsson, E.; Hagvall, R.; Urquhart, M.; Sebben, S. Numerical Analysis of Aerodynamic Impact on Passenger Vehicles during Cornering. SAE Technical Paper 2018-37-0014. In Proceedings of the CO2 Reduction for Transportation Systems Conference, Torino, Italy, 6–8 June 2018. [Google Scholar] [CrossRef] [Green Version]
- Keogh, J.; Graham Doig, G.; Tracie, J.; Barber, T.J.; Sammy Diasinos, S. The Aerodynamics of a Cornering Inverted Wing in Ground Effect. Appl. Mech. Mater. 2014, 553, 205–210. [Google Scholar] [CrossRef] [Green Version]
- Okada, Y.; Nouzawa, T.; Okamoto, S.; Fujita, T.; Kamioka, T.; Tsubokura, M. Unsteady Vehicle Aerodynamics during a Dynamic Steering Action: 1st Report, On-Road Analysis. SAE Technical Paper Series. In Proceedings of the SAE 2012 World Congress & Exhibition, Detroit, MI, USA, 24–26 April 2012. [Google Scholar] [CrossRef]
- Tsubokura, M.; Ikawa, Y.; Nakashima, T.; Okada, Y.; Kamioka, T.; Nouzawa, T. Unsteady Vehicle Aerodynamics during a Dynamic Steering Action: 2nd Report, Numerical Analysis. SAE Int. J. Passeng. Cars-Mech. Syst. 2012, 5, 340–357. [Google Scholar] [CrossRef]
- Roberts, L.S.; Joao Correia, J.; Mark, V.; Finnis, M.V.; Kevin Knowles, K. Aerodynamic characteristics of a wing & flap configuration in ground effect & yaw. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 230, 841–854. [Google Scholar] [CrossRef]
- Keogh, J.; Doig, G.; Diasinos, S.; Barber, T. The influence of cornering on the vortical wake structures of an inverted wing. Proc. IMechE Part D J. Automob. Eng. 2015, 229, 1817–1829. [Google Scholar] [CrossRef] [Green Version]
- Gogel, D.; Sakurai, H. The Effects of End Plates on Downforce in Yaw. SAE Technical Paper Series 2006-01-3647x. In Proceedings of the Motorsports Engineering Conference & Exposition, Dearborn, MI, USA, 5–7 December 2006; Available online: https://www.sae.org/publications/technical-papers/content/2006-01-3647/ (accessed on 1 January 2021).
- Winkelmann, H. Aerodynamics of the New BMW Z4. In Proceedings of the MIRA International Vehicle Aerodynamics Conference, Gaydon, UK, 25–26 October 2002. [Google Scholar]
- Katz, J. Aerodynamics of Race Cars. Annu. Rev. Fluid Mech. 2006, 38, 27–63. [Google Scholar] [CrossRef] [Green Version]
- Dominy, J.A.; Dominy, R.G. Aerodynamic Influences on the Performance of the Grand Prix Racing Car. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 1984, 198, 87–93. [Google Scholar] [CrossRef]
- Dominy, R.G. Aerodynamics of Grand Prix Cars. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 1992, 206, 267–274. [Google Scholar] [CrossRef]
- Lin, M.; Papadopoulos, P. Aerodynamic Benefits of Oblique Wing Geometry for Race Cars by CFD Analysis. In Proceedings of the 26th Annual Conference of the Computational Fluid Dynamics Society of Canada (CFD2018), Winnipeg, MB, Canada, 10–12 June 2018. [Google Scholar]
- Broniszewski, J.; Piechna, J. A fully coupled analysis of unsteady aerodynamics impact on vehicle dynamics during braking. Eng. Appl. Comput. Fluid Mech. 2019, 13, 623–641. [Google Scholar] [CrossRef]
- Savkoor, A.R.; Chou, C.T. Application of Aerodynamic Actuators to Improve Vehicle Handling. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 1999, 32, 345–374. [Google Scholar]
- How This Hypercar’s Tilting Wing Gives It More Grip. Available online: https://www.youtube.com/watch?v=OaItQaSlSxs (accessed on 30 October 2021).
- Zenvo’s Crazy Tilting Rear Wing Would Make a Car Handle Worse. Available online: https://www.roadandtrack.com/new-cars/car-technology/a21081048/zenvos-tsrs-rear-wing-analysis/ (accessed on 30 October 2021).
- Kurec, K.; Piechna, J. Influence of Side Spoilers on the Aerodynamic Properties of a Sports Car. Energies 2019, 12, 4697. [Google Scholar] [CrossRef] [Green Version]
- Remmerie, W.R.J. Vehicle with Lateral Force Generation. Patent WO2013/049900A1, 11 April 2013. [Google Scholar]
- Maho, H. Concepts for Generating Lateral Aerodynamic Forces by Means of an Asymmetric Airflow. Available online: https://airshaper.com/research/sports-car-lateral-aerodynamics (accessed on 30 October 2021).
- Kurec, K.; Remer, M.; Mayer, T.; Tudruj, S.; Piechna, J. Flow control for a car-mounted rear wing. Int. J. Mech. Sci. 2019, 152, 384–399. [Google Scholar] [CrossRef]
- Piechna, J. A Review of Active Aerodynamic Systems for Road Vehicles. Energies 2021, 14, 7887. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, Z.; Zhu, X.; Liu, L.; Zhang, Y. Analysis of Aerodynamic Performance of Tesla Model S by CFD. In Proceedings of the 3rd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2017), Guangzhou, China, 8–10 September 2017. [Google Scholar]
- Zhang, C.; Bounds, C.P.; Foster, L.; Uddin, M. Turbulence modeling effects on the CFD predictions of flow over a detailed full-scale sedan vehicle. Fluids 2019, 4, 148. [Google Scholar] [CrossRef] [Green Version]
- Szudarek, M.; Piechna, J. CFD Analysis of the Influence of the Front Wing Setup on a Time Attack Sports Car’s Aerodynamics. Energies 2021, 14, 7907. [Google Scholar] [CrossRef]
- Bugatii Veyron 16.4 Super Sport-Technical Specifications. Available online: https://assets.bugatti.com/fileadmin/media/Media/Veyron/Super_Sport/Technical_Specifications_Bugatti_Veyron_16.4_Super_Sport.pdf (accessed on 30 October 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cx | Cy | Cz | Cmx | Cmy | Cmz | Czf | Czr |
|---|---|---|---|---|---|---|---|
| 0.3 | −0.0044 | 0.0145 | −0.0041 | 0.022 | −0.0178 | −0.0265 | 0.0410 |
| Fx (N) | Fy (N) | Fl (N) | Mx (Nm) | My (Nm) | Mz (Nm) | Cd | Cy | Cz | Cmx | Cmy | Cmz | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Tilted wing | 925 | 234 | −1001 | 270 | −1817 | 440 | 0.445 | 0.113 | −0.482 | 0.130 | −0.876 | 0.212 |
| Tilted Wing | Cx | Cy | Cz | Cmx | Cmy | Cmz | Czf | Czr |
|---|---|---|---|---|---|---|---|---|
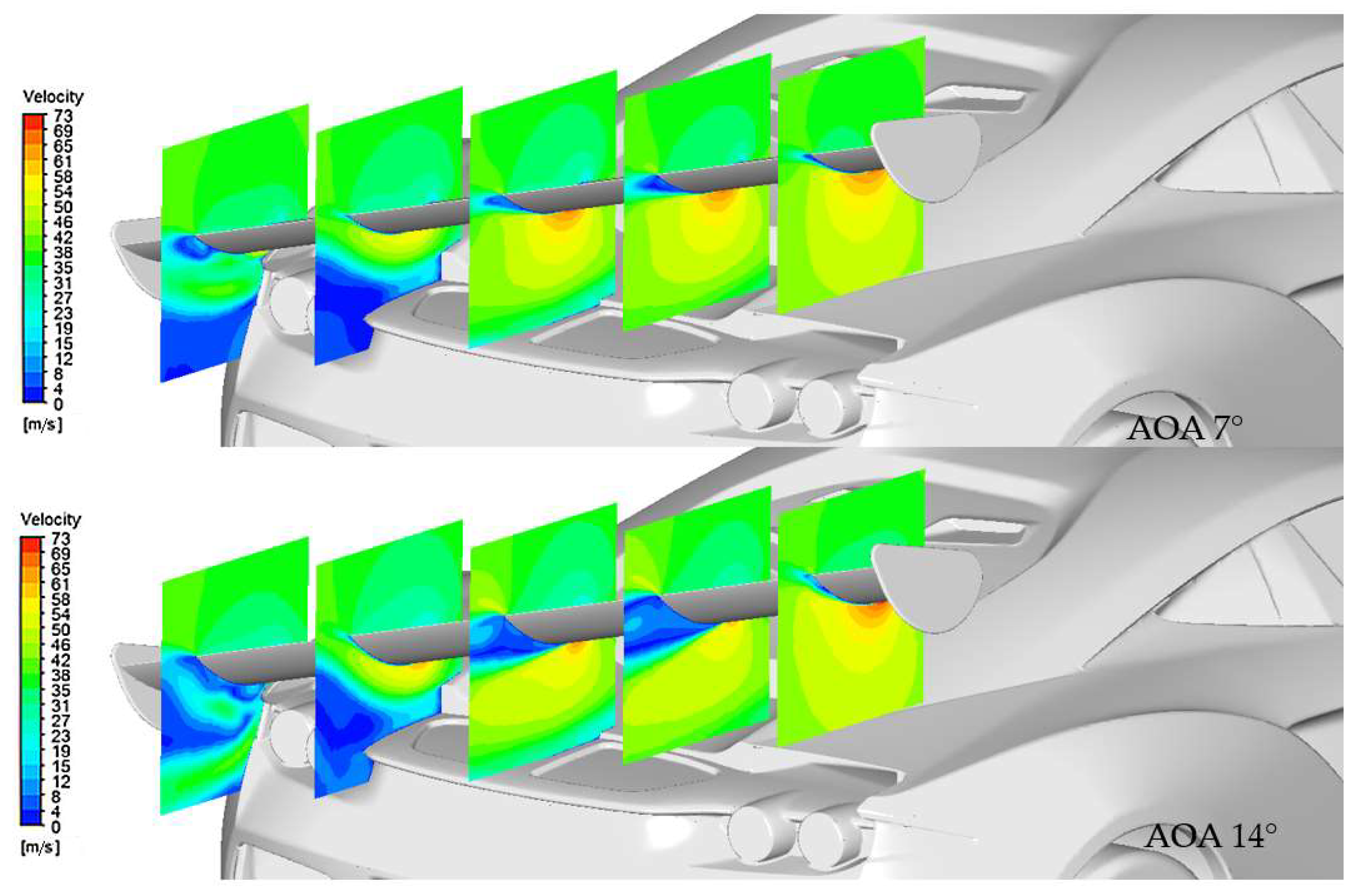
| AOA 7° | 0.606 | 0.036 | −0.674 | −0.031 | −0.861 | 0.000 | 1.070 | −1.744 |
| AOA 14° | 0.589 | 0.040 | −0.702 | −0.031 | −0.822 | −0.006 | 1.040 | −1.742 |
| Difference (%) | 2.77 | −8.62 | −4.07 | −0.84 | 4.79 | −102.02 | 2.94 | 0.11 |
| Cx | Cy | Cz | Cmx | Cmy | Cmz | Czf | Czr | |
|---|---|---|---|---|---|---|---|---|
| steady wheels | 0.606 | 0.036 | −0.674 | −0.031 | −0.861 | 0.000 | 1.070 | −1.744 |
| rotating wheels | 0.589 | 0.040 | −0.702 | −0.031 | −0.822 | −0.006 | 1.040 | −1.742 |
| Difference (%) | 2.77 | −8.62 | −4.07 | −0.84 | 4.79 | −102.02 | 2.94 | 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piechna, J.R.; Kurec, K.; Broniszewski, J.; Remer, M.; Piechna, A.; Kamieniecki, K.; Bibik, P. Influence of the Car Movable Aerodynamic Elements on Fast Road Car Cornering. Energies 2022, 15, 689. https://doi.org/10.3390/en15030689
Piechna JR, Kurec K, Broniszewski J, Remer M, Piechna A, Kamieniecki K, Bibik P. Influence of the Car Movable Aerodynamic Elements on Fast Road Car Cornering. Energies. 2022; 15(3):689. https://doi.org/10.3390/en15030689
Chicago/Turabian StylePiechna, Janusz Ryszard, Krzysztof Kurec, Jakub Broniszewski, Michał Remer, Adam Piechna, Konrad Kamieniecki, and Przemysław Bibik. 2022. "Influence of the Car Movable Aerodynamic Elements on Fast Road Car Cornering" Energies 15, no. 3: 689. https://doi.org/10.3390/en15030689
APA StylePiechna, J. R., Kurec, K., Broniszewski, J., Remer, M., Piechna, A., Kamieniecki, K., & Bibik, P. (2022). Influence of the Car Movable Aerodynamic Elements on Fast Road Car Cornering. Energies, 15(3), 689. https://doi.org/10.3390/en15030689