In recent years, the rapidly increasing load demand in power systems has resulted in substantial and random variation in load. As load increases, the frequency of the system decreases, leading to under-frequency conditions; therefore, the speed of the generator reduces as well. Similarly, with sudden load loss, the frequency increases, resulting over-frequency conditions [
1,
2]. This variation causes power system disturbances to occur. Hence, to eliminate this variation and improve the system’s performance, automatic generation control (AGC) must be designed for power systems to reduce the losses and balance the total generating power with the total load demand [
3,
4]. An interconnected power system consists of two or more areas connected through a tie-line, with each area having an equivalent generator, turbine, and governor system [
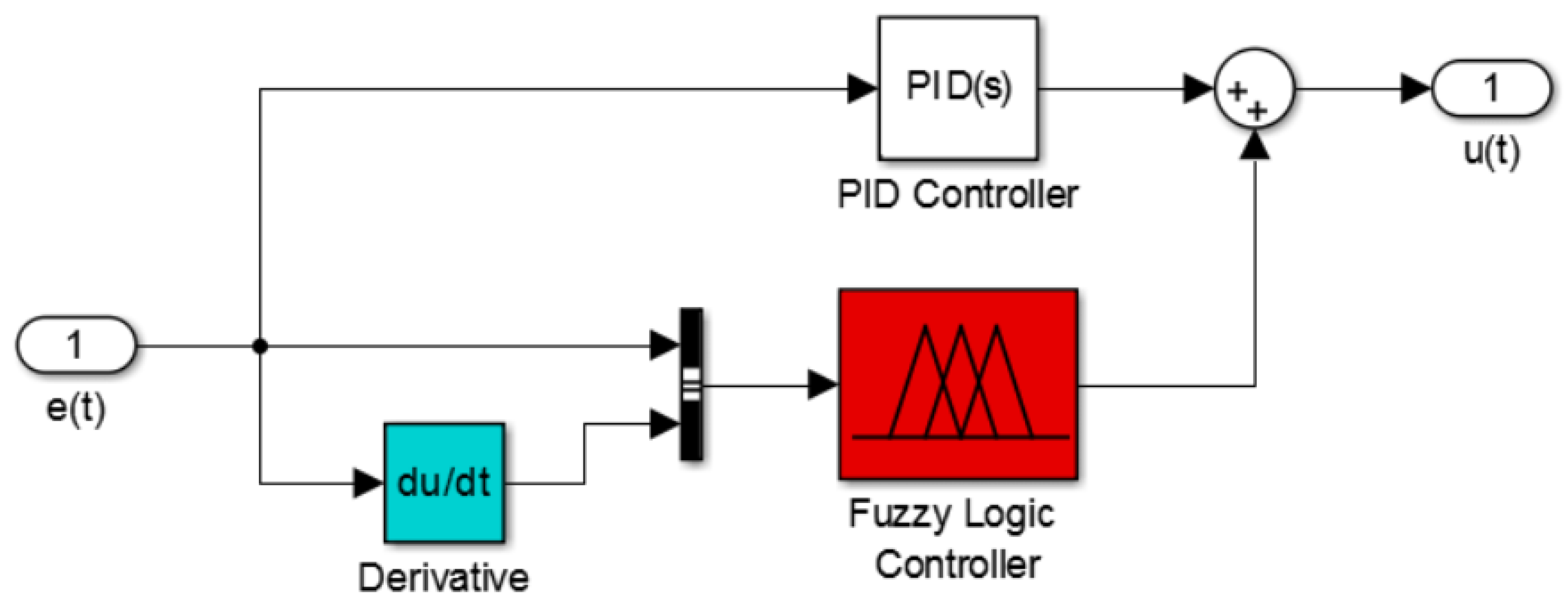
5]. To the frequency remains at a constant value, a controller must be used. One controller type is the proportional Integral derivative (PID) controller, which is one of the most commonly used. The gain of the controller provides high stability, but for the case of complex characteristics and slow response, a PID integrated with a fuzzy logic controller was constructed [
6]. Recently, various optimization techniques have been proposed including: (i) particle swarm optimization (PSO), (ii) bacteria foraging optimization (BFO), (iii) genetic algorithm (GA), (iv) simulated annealing (SE), (v) differential evolution (DE), (vi) butterfly optimization (BO), (vii) ant colony optimization (ACO), and (viii) pattern search (PS) [
7,
8,
9]. Electric vehicles and grids with a high pentration of renewable energy sources (EVs) such as wind and solar can significantly improve the time response of the system as well as lower the cost of unexpected power imbalances between output and demand, Imitate learning like transfer learning aims to increase the learning efficiency of agents [
10]. The automatic generation control (AGC) based on the frequency regulation market and generation tribe (VGT) is implemented using two algorithms: a new real-time optimal mileage based dispatch (OMD) and a consensus transfer Q-learning (CTQ). Both algorithms can be accelerated, and the AGC period requirement is met. Furthermore, CTQ employs a behavior transfer to use existing knowledge of source tasks to generate a new optimization job based on their similarities [
11,
12]. A unique adaptive distributed auction-based algorithm (ADAA) is utilized to swiftly identify a high-quality dispatch scheme in a distributed way and minimize the power deviation between the dispatch command and the real power regulation output due to its fast convergence speed and model-free feature. ADAA can converge faster and reduce communication traffic since it simply uses an adaptive swap size depending on the instant optimization findings [
13]. Several researchers have studied various control techniques for the automatic control generation (AGC) of innumerable connected power systems. The main objective of these studies was to use a control algorithm in AGC to improve system performance through damping the variation in frequency and stabilizing the fluctuation in the tie-line power flow. Despite the fact that most control schemes improved the LFC system’s performance, the controller must be readjusted whenever the disturbance changes, according to the majority of the literature. Moreover, Due to the complexity of interconnected power systems with a large number of nonlinear properties, Mamdani implemented the first fuzzy logic control algorithm on a steam engine after Zadeh introduced fuzzy set theory. Fuzzy logic controllers are some of the controllers better suited to these systems; they have several advantages: (i) providing a featured of copy data quickly and efficiently, (ii) having fast interaction during the process, and (iii) providing rules extracted from human brain and experts [
14,
15]. The authors of [
16] compared different controllers in a deregulated power system for diverse multiple-area sources using differential evolution (DE) and genetic algorithm (GA). The results show that the PID controller with DE performed better. Other authors of [
17] improved the structure of the multisource interconnected power system (IPS) where AGC is achieved using an integral proportional derivative (IPD) controller. The results demonstrated the superiority of the performance of the system with regard to system frequency overshoot (Osh), undershoot (Ush), and settling time (Ts). The authors of [
18] employed a differential evolution approach to improve AGC while taking nonlinearity into account as a governor deadband. In order to improve the performance of a single-area AGC in [
19] uses a more appropriate technique based on increasing the controller’s transfer function using Laurent series to boost the controller performance of two-area AGC systems, the Firefly Algorithm outperformed various optimization strategies [
20]. The gravity search technique was designed in [
21,
22] to increase the reaction to a deviation in frequency between multi-area power systems. This algorithm is based on certain advanced controllers such as ISE and PI.The authors of [
23,
24] compared the implementation of a PI controller with a fuzzy logic controller in two and three areas with diverse sources for each area. The results showed that fuzzy logic controller performed better than the PI controller, considering overshoot and settling. Others [
25] proposed a new method of tuning the fuzzy logic that is quick when setting deregulated multi-area power systems (thermal, gas, and photovoltaic). The findings demonstrated that this method of tuning the logic helps to quickly reduce external error. The authors of [
26,
27] proposed a load frequency controller for multi-area single power systems. A parallel connection of a fuzzy logic controller with a PID controller for three-area automatic generation control was tested for dynamic improvement when load disturbance occurred in one area. The results showed that the fuzzy controller performed better. Various scenarios of renewable energy penetration in a two-area power system presented in [
28] with different step load demand disturbances based on the ant colony algorithm. The results demonstrated that their method supported the frequency stability of the system [
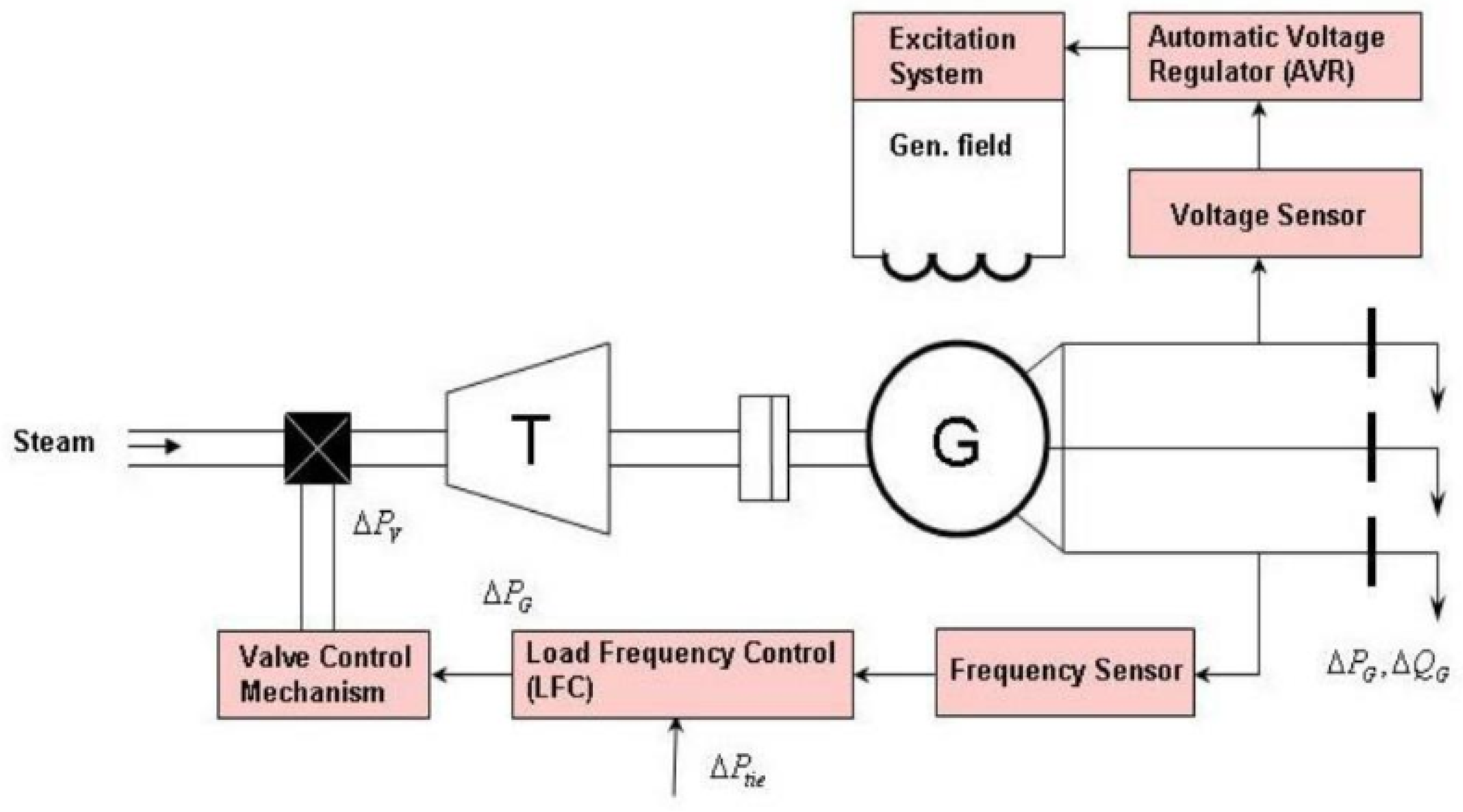
29]. Automatic generation control is considered an interaction between load frequency control (LFC) and an automatic voltage regulator (AVR), as shown in
Figure 1. This interaction is simply a combination of frequency control to include an excitation system, which is part of LFC and voltage control through the governor control using AVR [
30]. The ideal parameters for the FOPID controller are determined using the teacher-learning-based optimization (TLBO) technique, with the objective function being the integral time-multiplied absolute error (ITAE). By comparing the suggested controller to a PID controller, the superiority of the proposed controller was demonstrated [
31]. Researchers [
32] reported three different types of levitation control algorithm. The control performance of these algorithms was tested for the optimization of magnet current. PID + fuzzy control effectively lowered magnet current fluctuation and reduces the RMS value of magnet current; PI+P hybrid control effectively reduced the impact of mutation interference on the current and reduced the current fluctuation range.
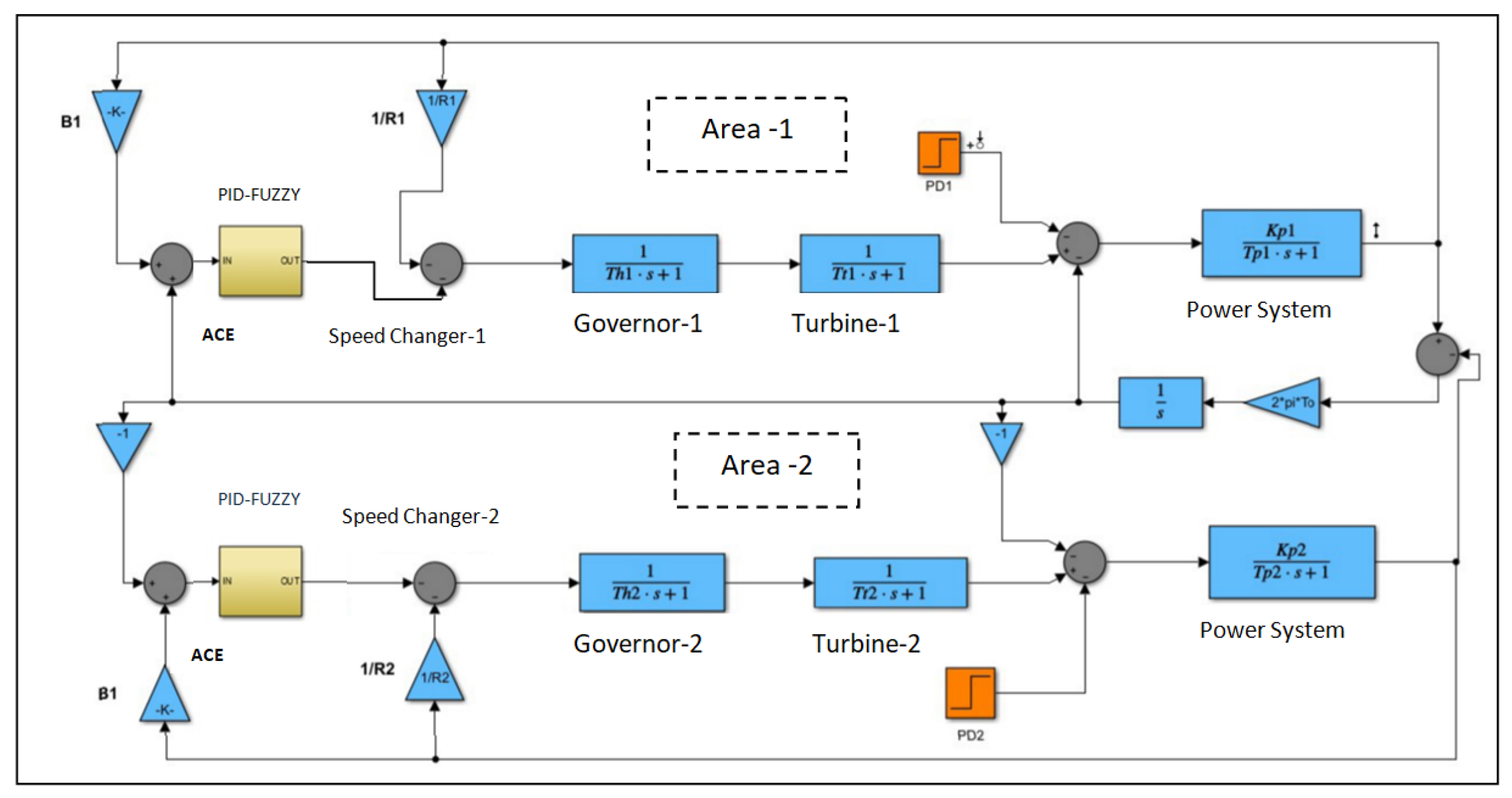
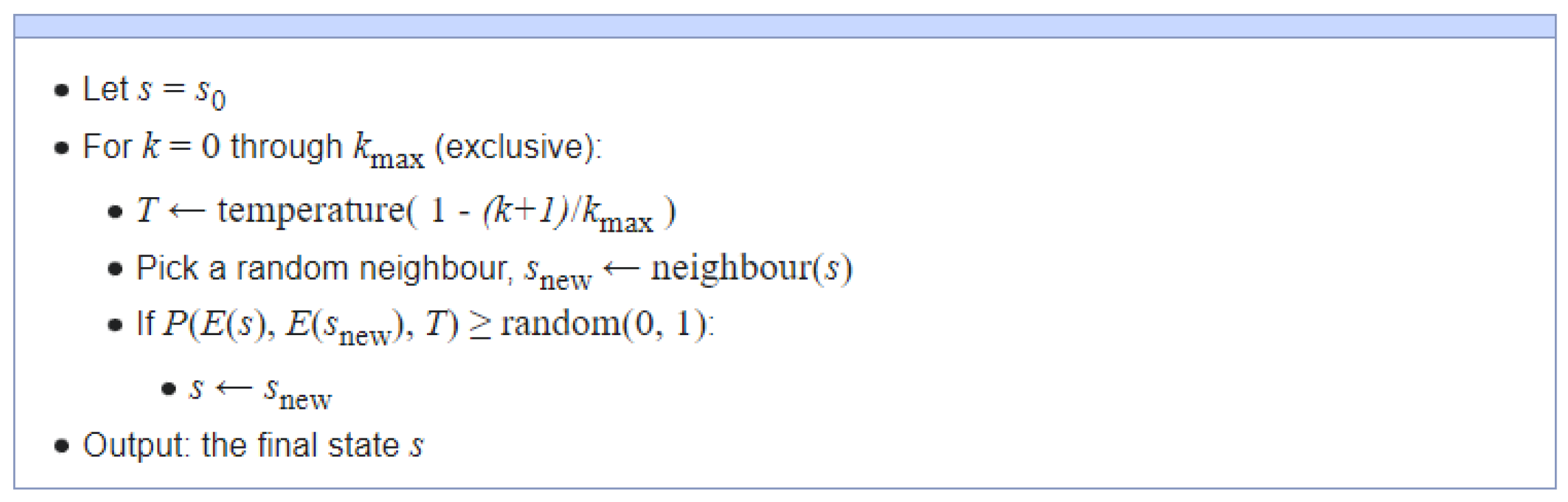
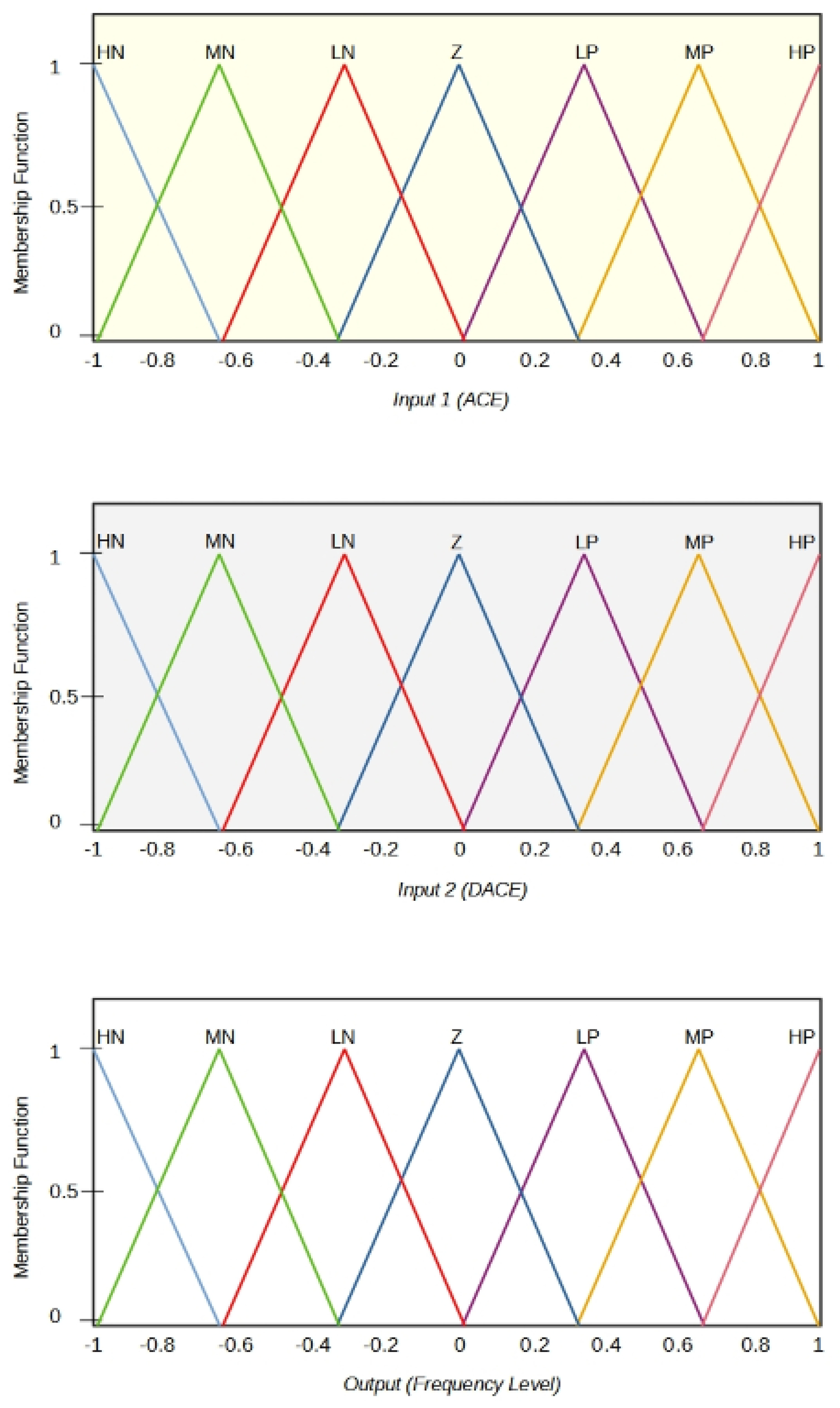
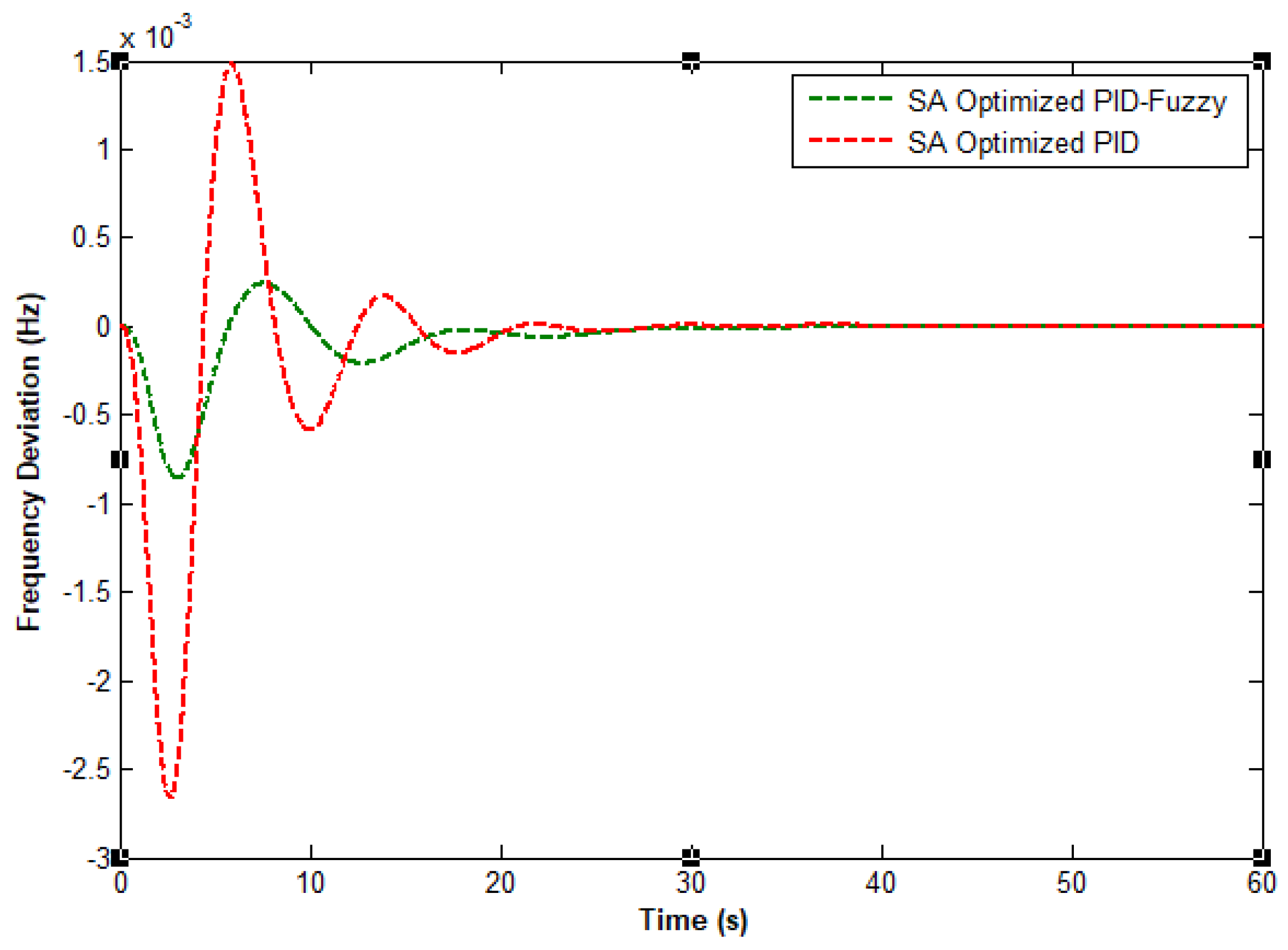
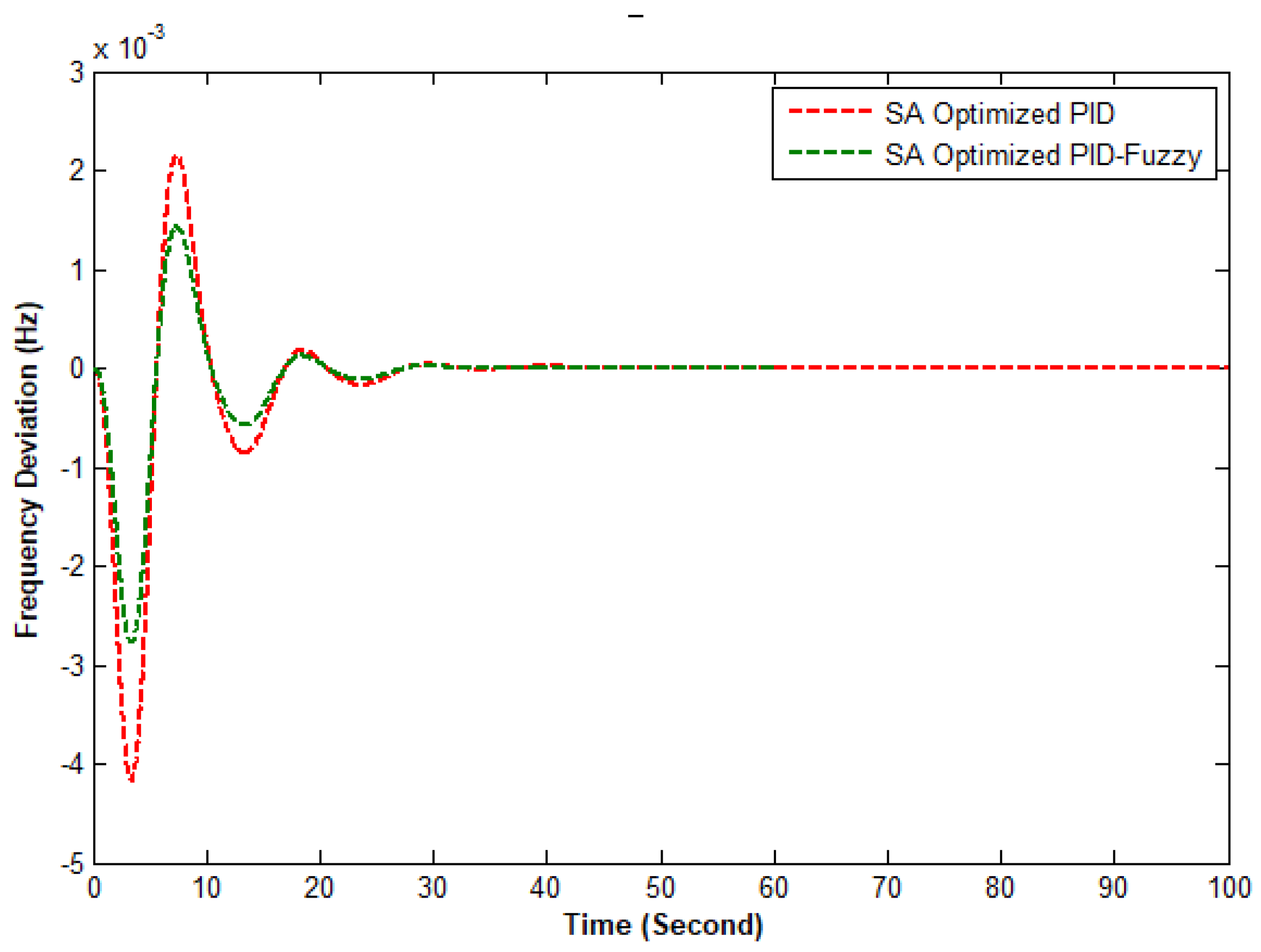
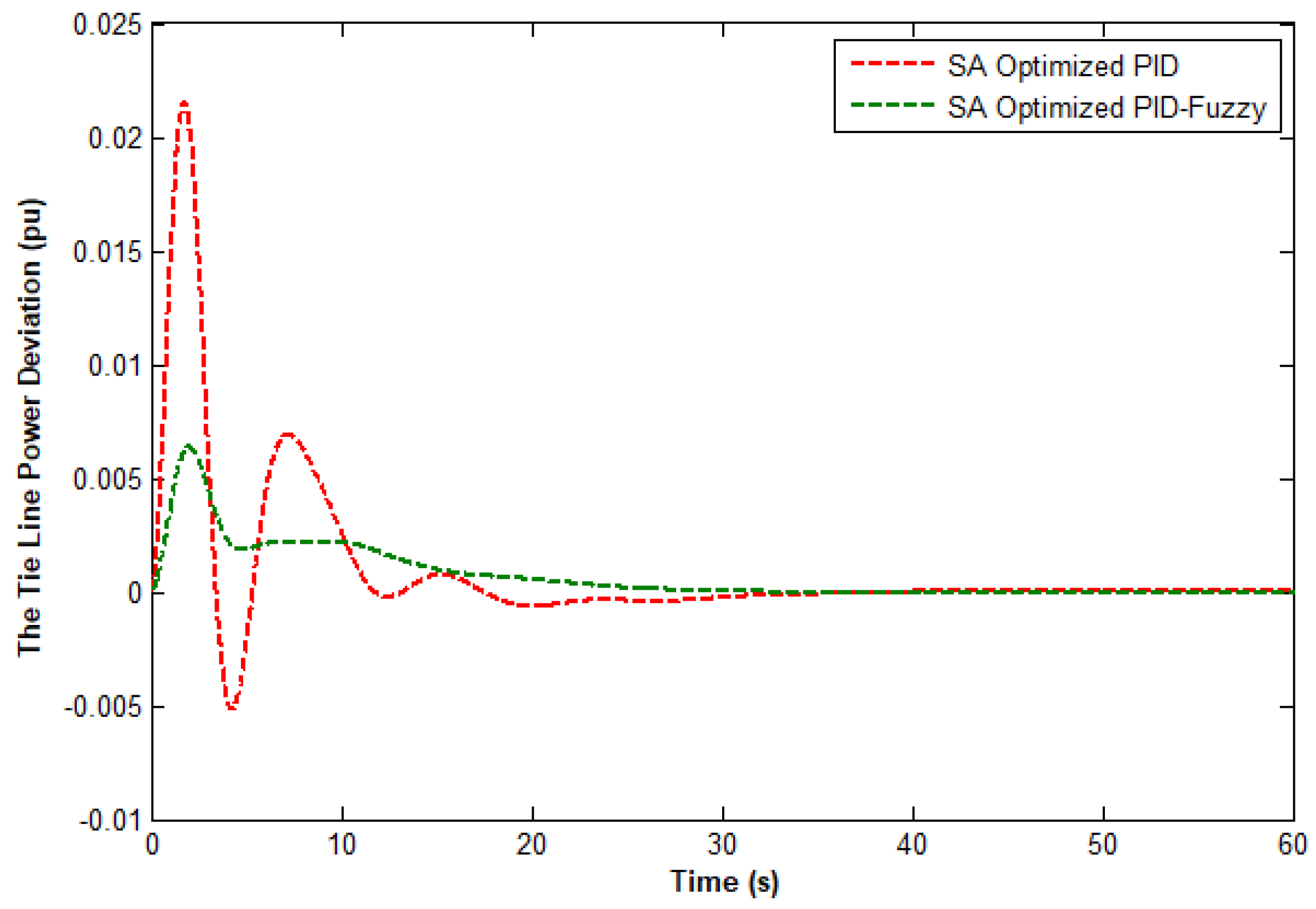
Based on the literature review mentioned above, we found that most studies concentrated on generation control in power systems such as thermal, hydro, and gas according to the number of areas connected in the system, which comprised large power plants. Therefore, each area consisted of many parameters that affect the power flow and frequency of the tie. In this study, for two interconnected areas with unequal power systems, we optimally designed an intelligent controller based on the simulated annealing technique to enhance the frequency stability. We developed the objective function using the optimization technique to coordinate the PID controller and to obtain the upper and lower boundaries of the fuzzy logic controller membership function. The contribution of this paper is briefly summarized as the description of the behavior of the frequency and tie-line power flow fluctuations in the presence of step load demand perturbation, and we performed a comparative study of two controllers with two cases of disturbances in term of settling time, peak amplitude, and peak time.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}