
An Improved Partial Shading Detection Strategy Based on Chimp Optimization Algorithm to Find Global Maximum Power Point of Solar Array System



Abstract
:1. Introduction
- (a)
- Rarely discussed and inefficient classification/identification of uniform, partial shading, or load-varying conditions.
- (b)
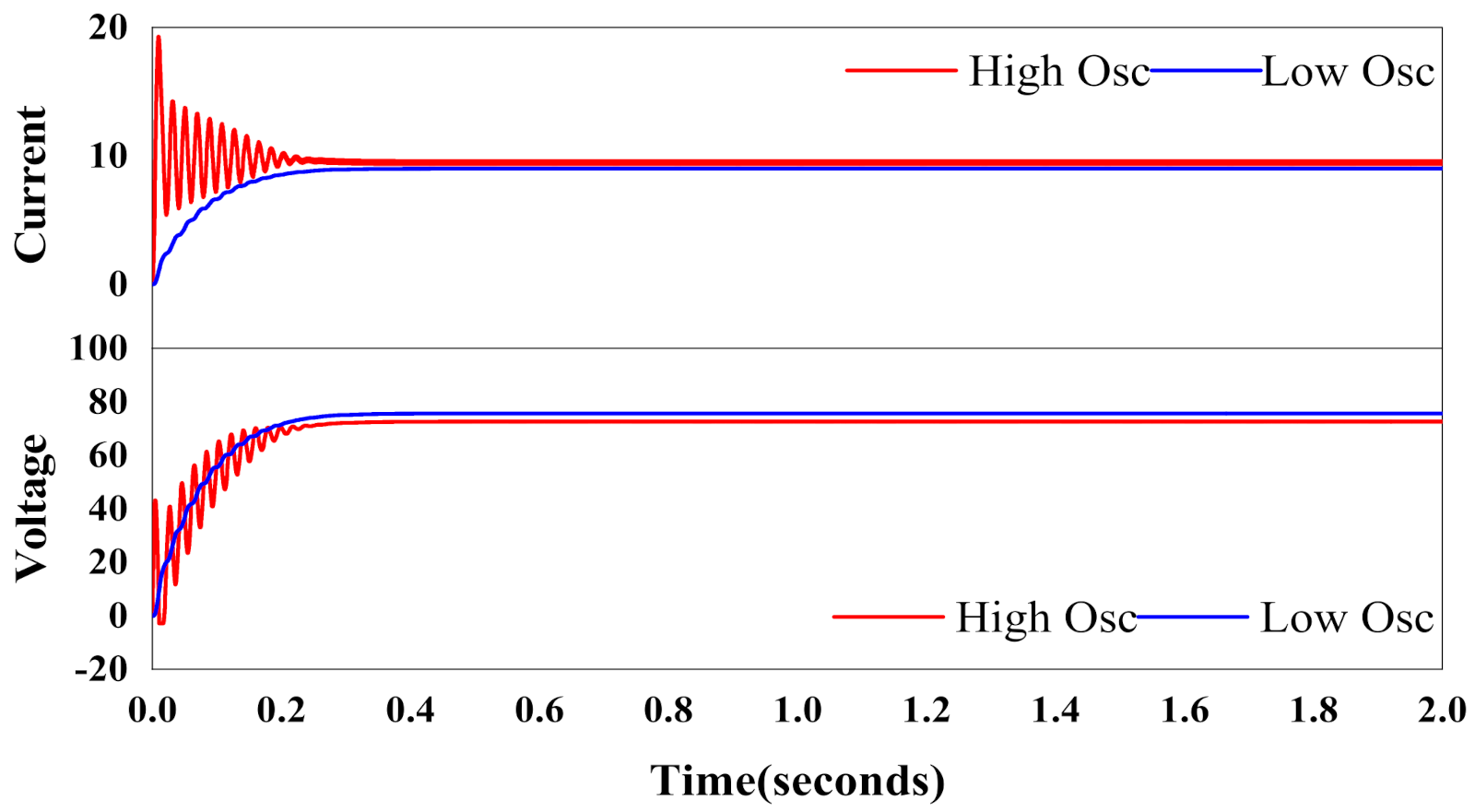
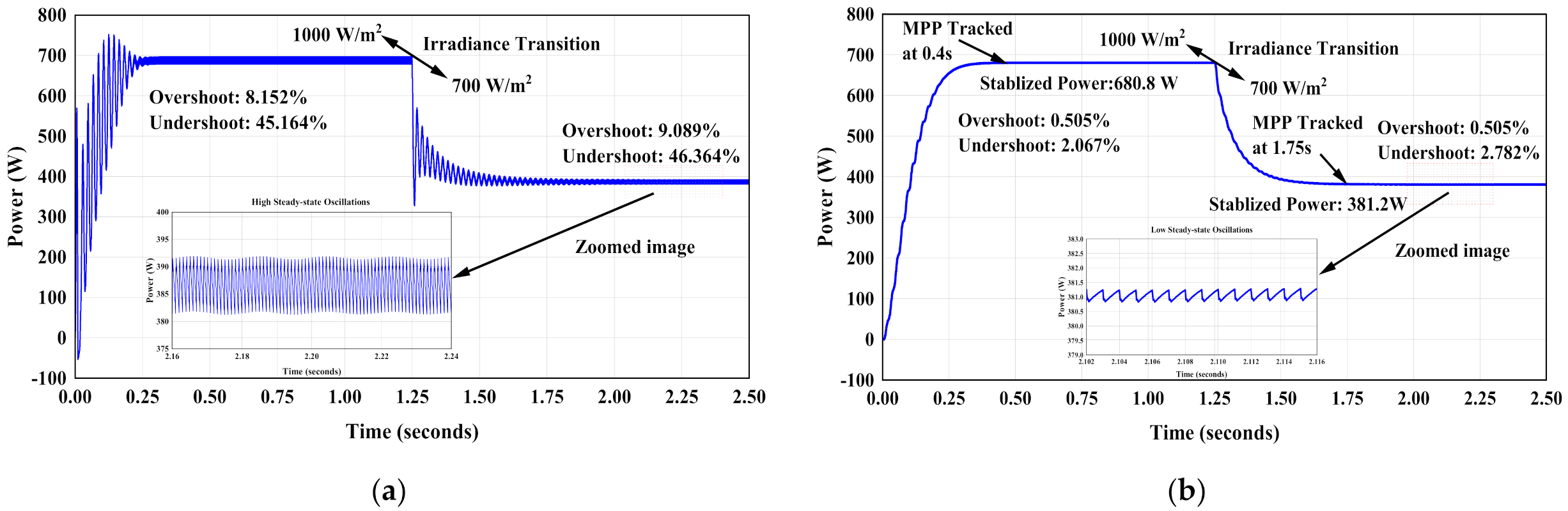
- Slow convergence speed and large tracking and steady-state oscillations.
- (c)
- Unsuccessful tracking of GMPP due to inefficient triggering of MPPT algorithms caused by incorrect detection of actual operating conditions of the PV system.
- Identification of actual operating conditions of the PV system, as well as discrimination between uniform irradiance change, non-uniform irradiance change, and load variations.
- Observing and distinguishing the combined effect of load and irradiance variations.
- Oscillation-free transient and steady-state GMPP tracking under uniform and non-uniform conditions using modified P&O and chimp optimization algorithms, respectively.
- Efficiently maintaining GMPP under load variations to verify the robustness of the proposed methodology.
- The superiority of the proposed technique is confirmed through comparative analysis with modified P&O, PSO, GWO, and FPA MPPT methods.
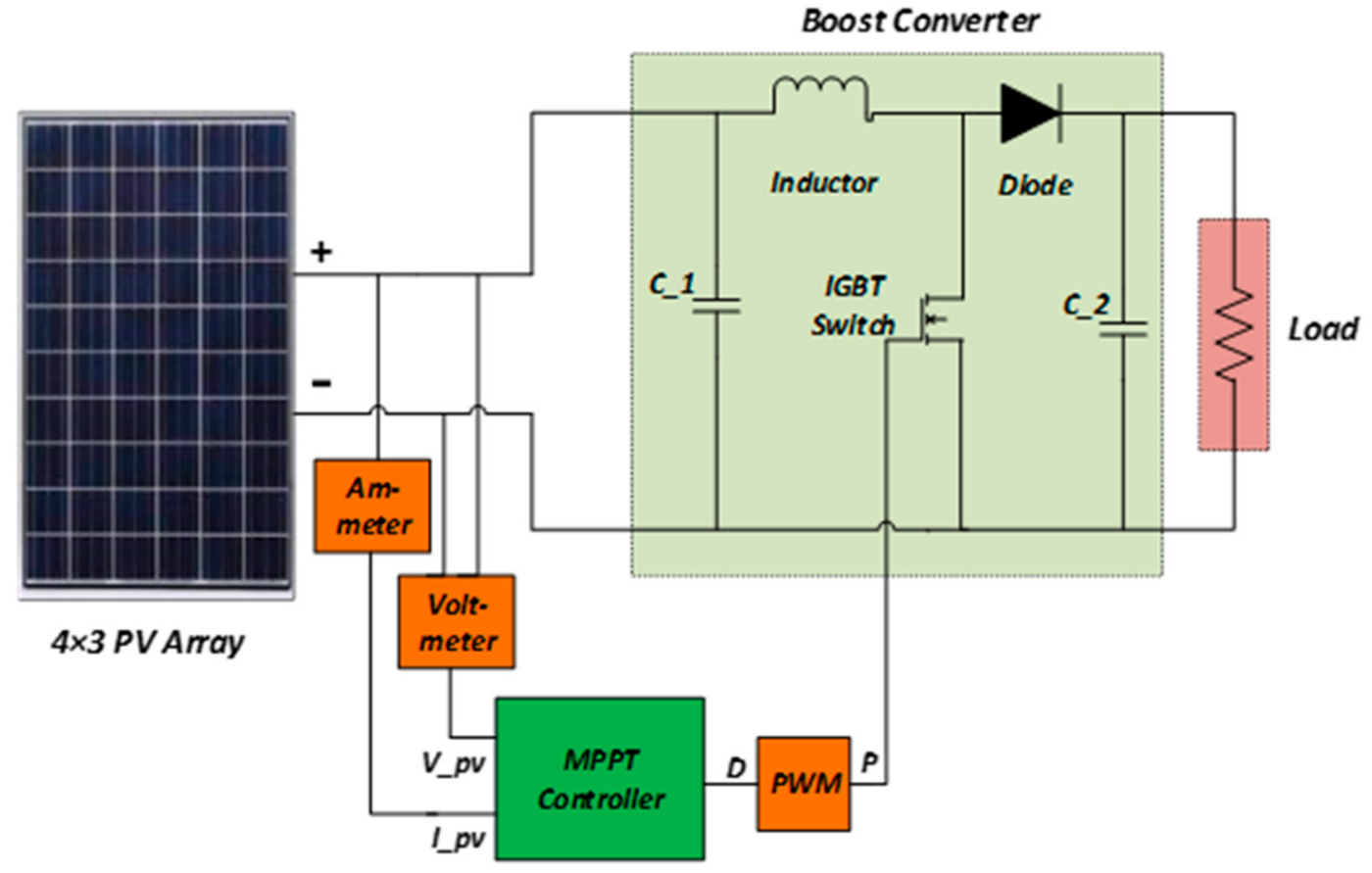
2. PV System Modelling
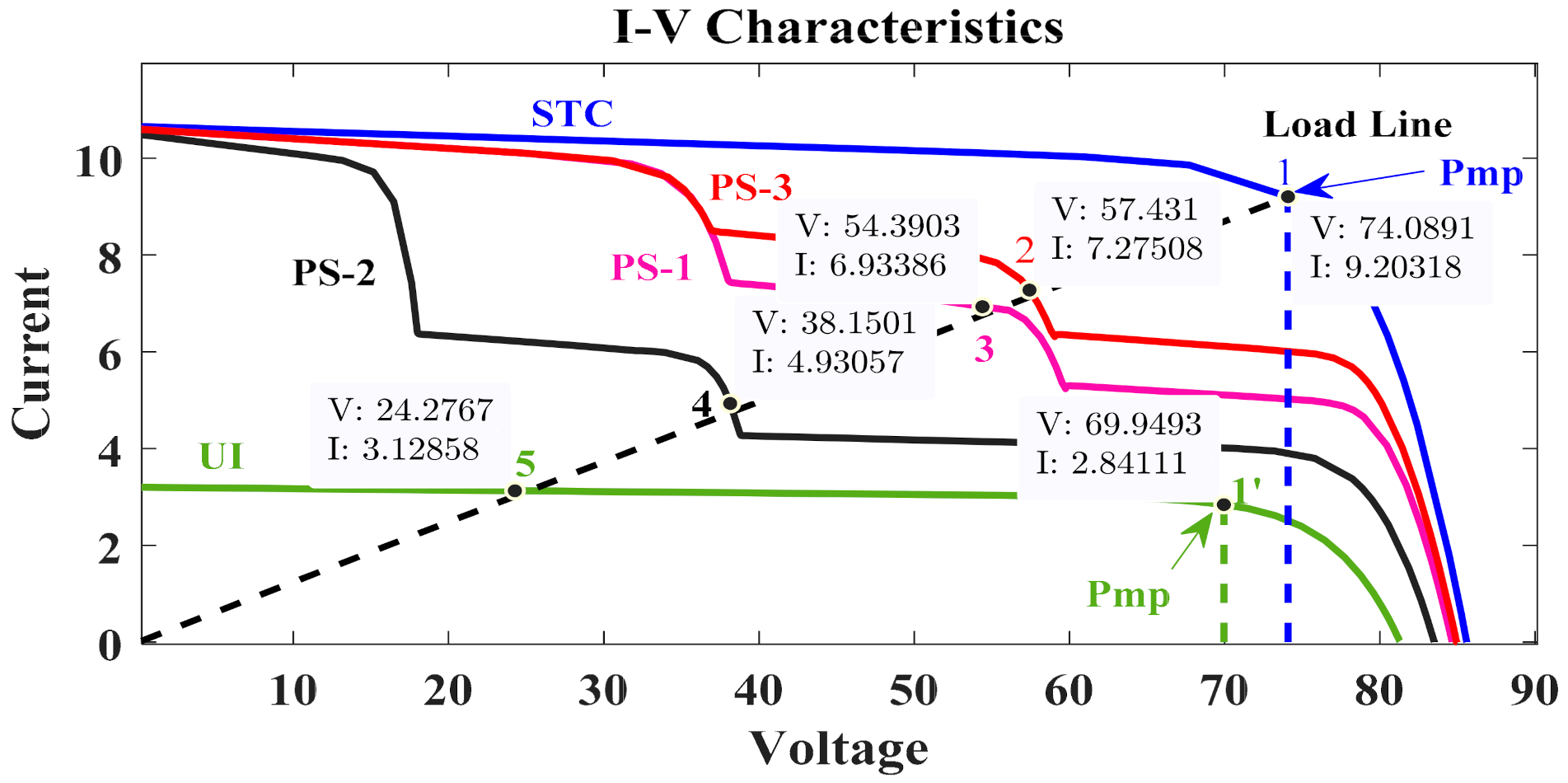
3. Operating Conditions
3.1. Classification of Uniform and Non-Uniform Irradiance Variation
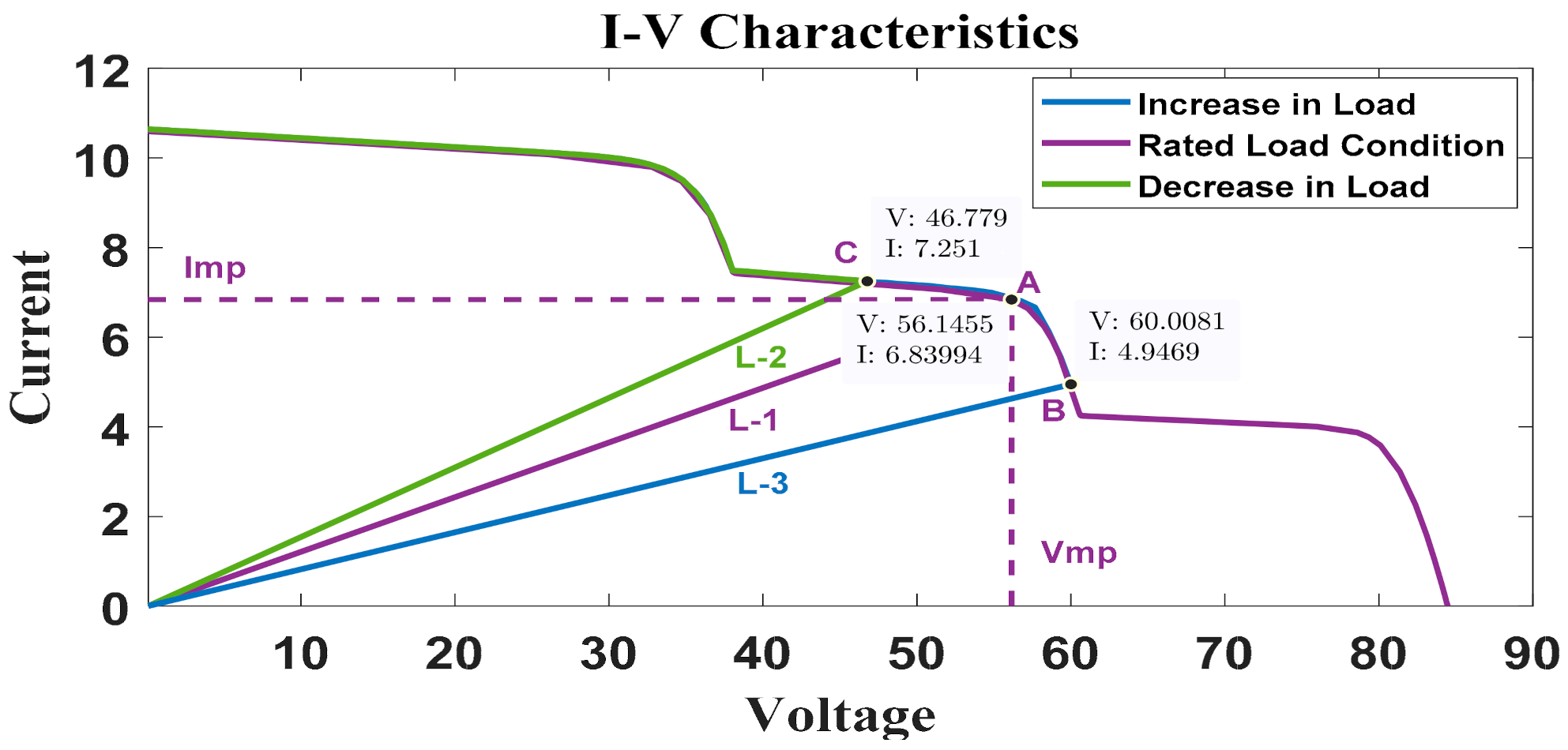
3.2. Identification of Load Variations
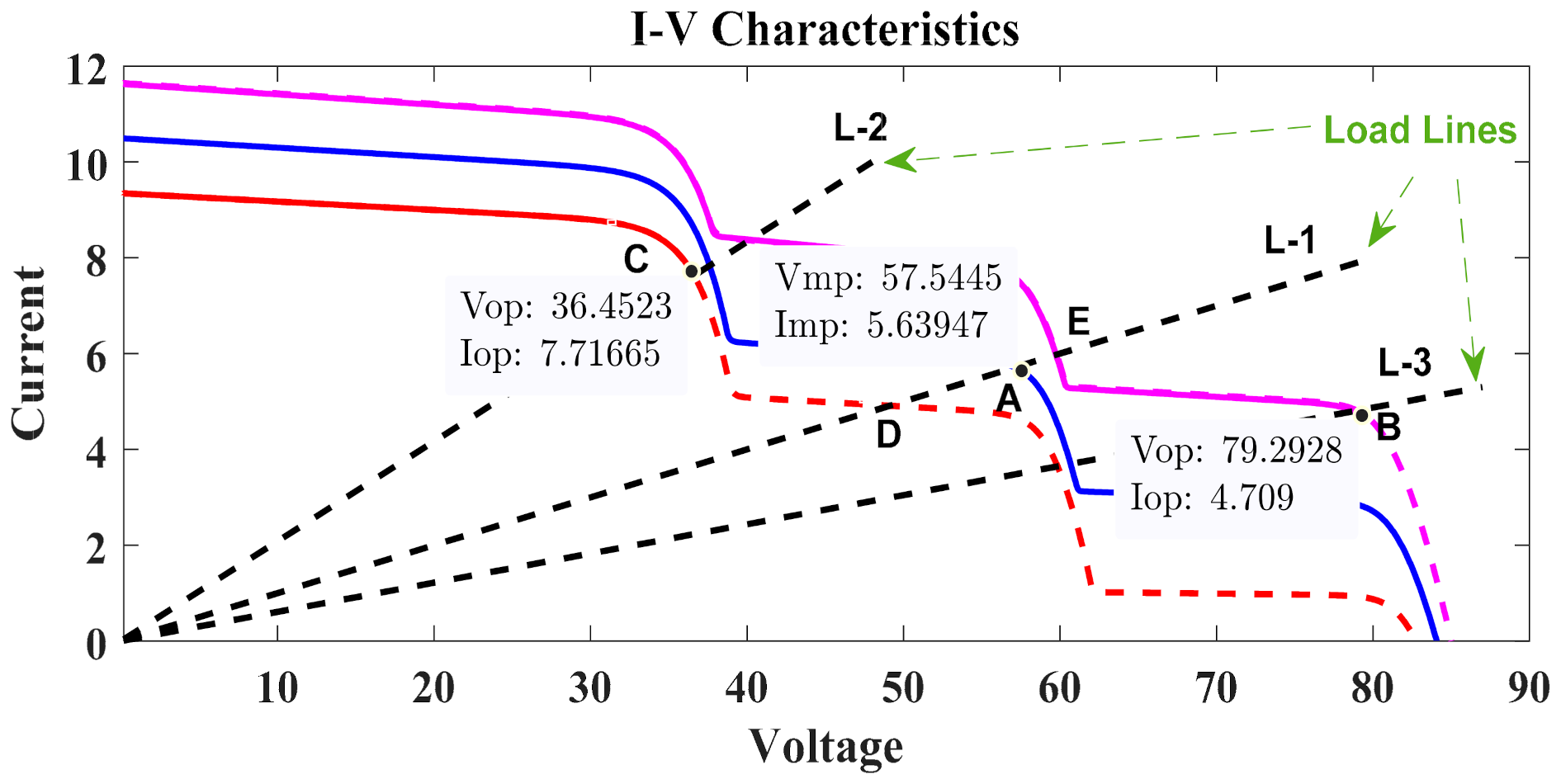
3.3. Combined Effect of Load and Irradiance Variations
4. Proposed Hybrid GMPPT Methodology
4.1. Identification of Operating Conditions
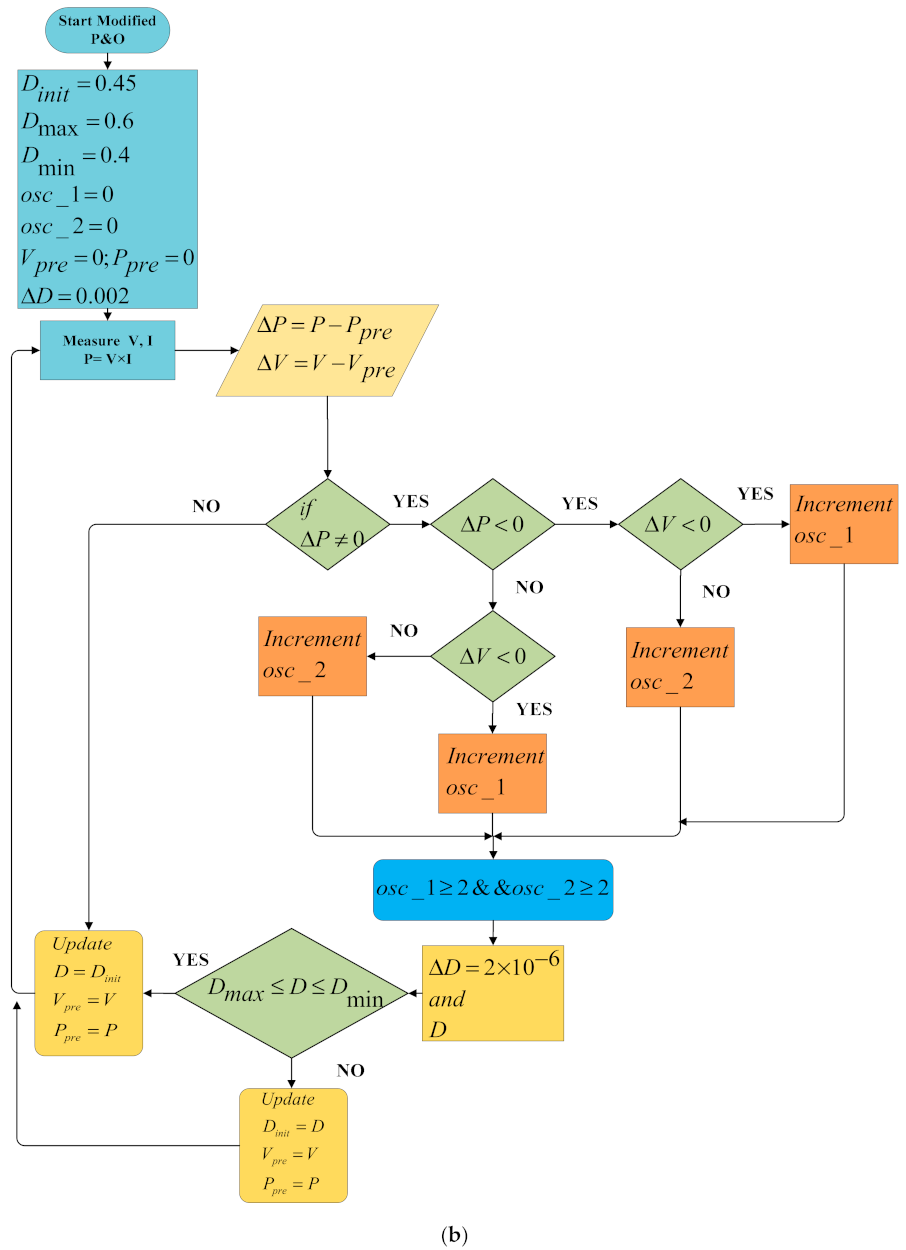
4.2. Oscillation-Free Tracking of MPP Using Modified Perturb and Observe under UIC
4.3. Chimp Optimization Algorithm (ChOA)
Mathematical Formulation of ChOA
5. Results and Discussions
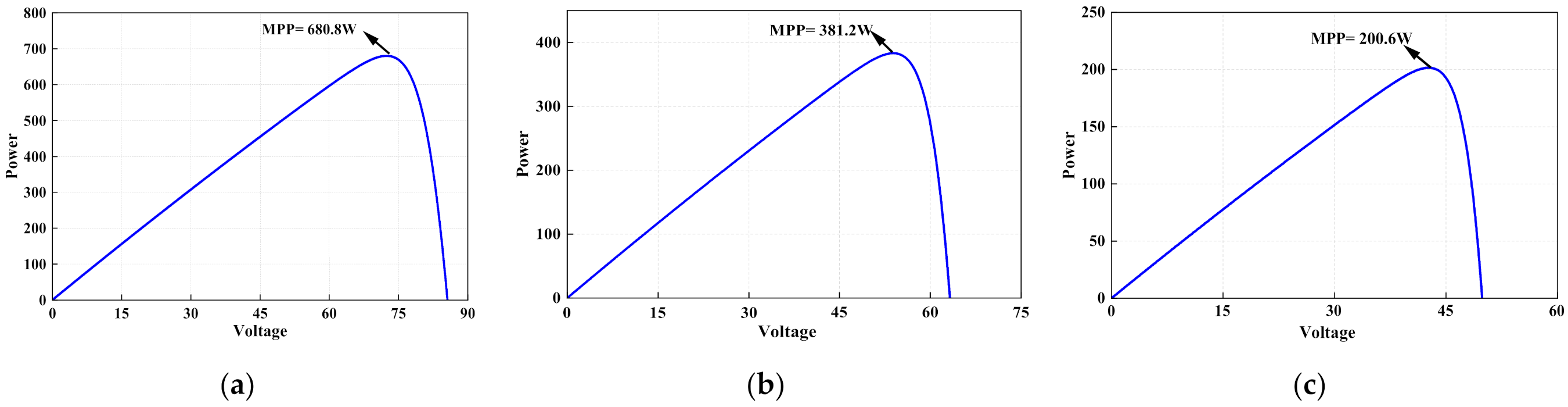
5.1. Uniform Irradiance Conditions
5.1.1. Standard Test Condition (STC)
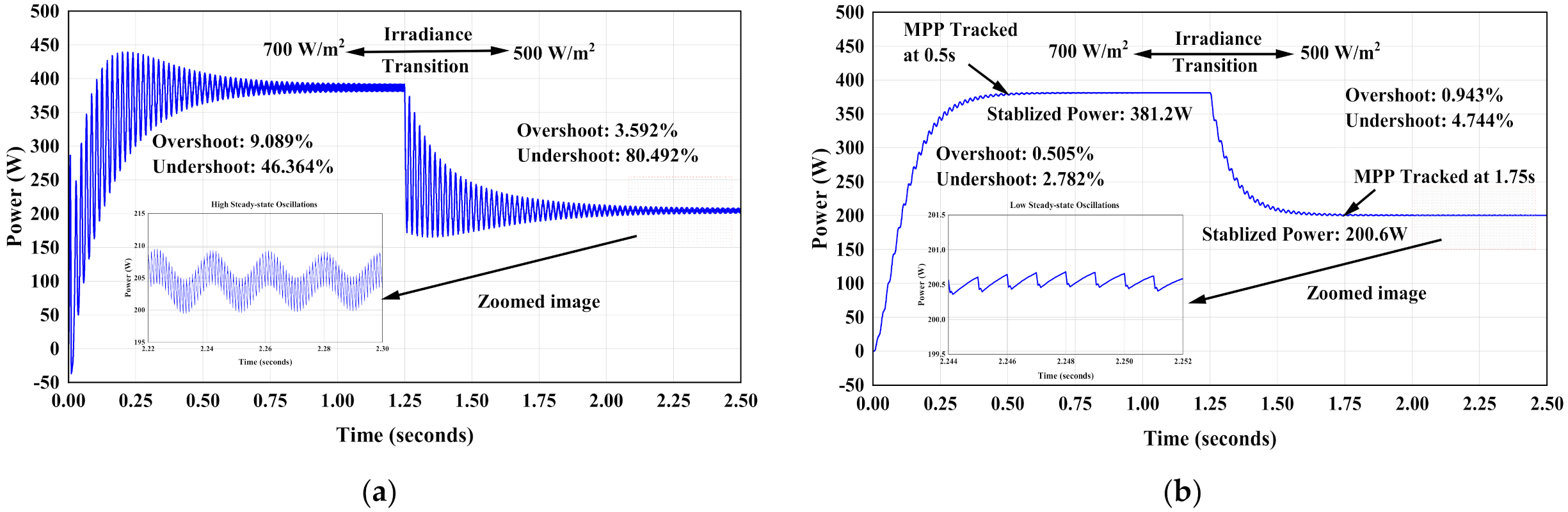
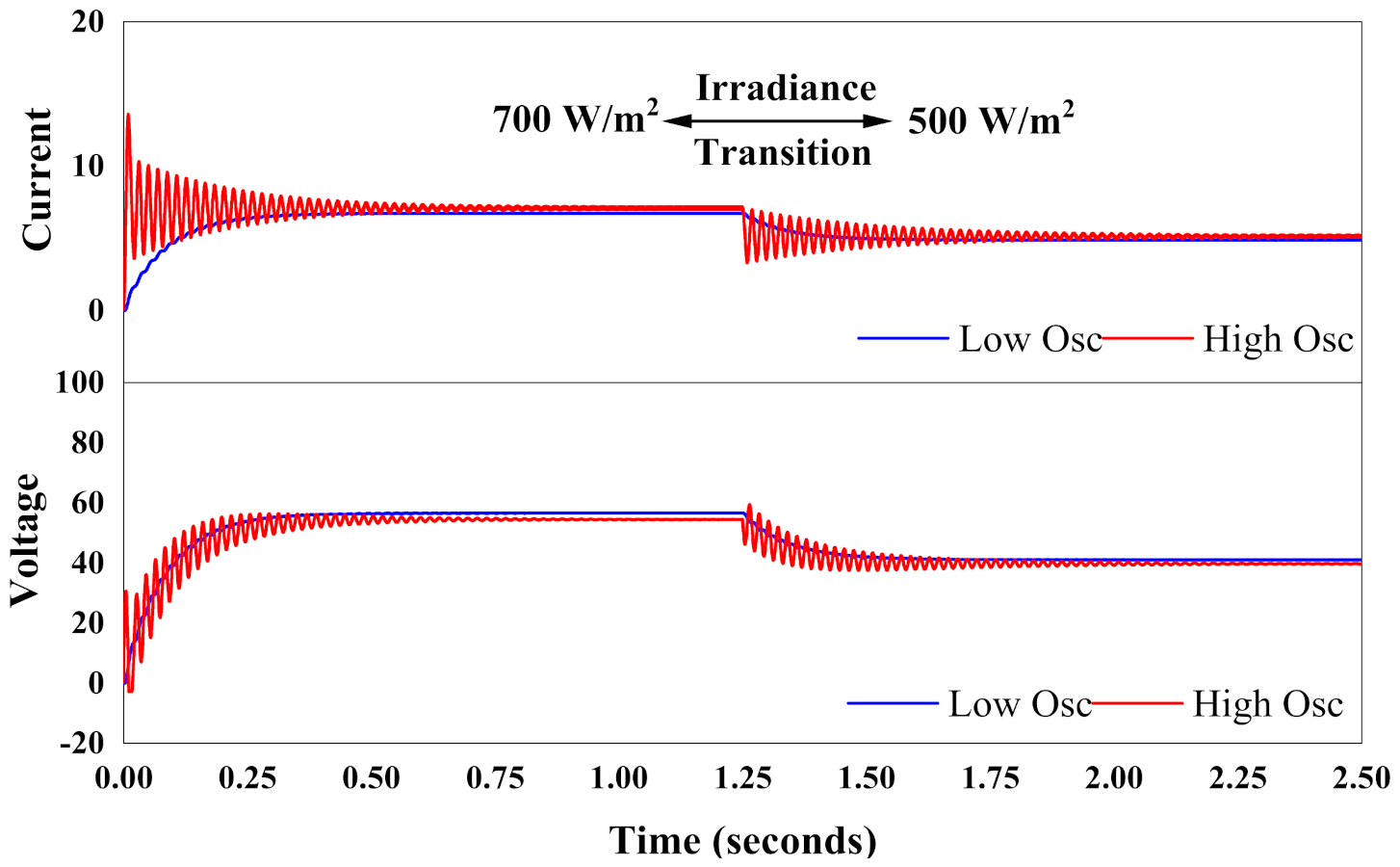
5.1.2. Irradiance Transition (STC→UI-1)
5.1.3. Irradiance Transition (UI-1→UI-2)
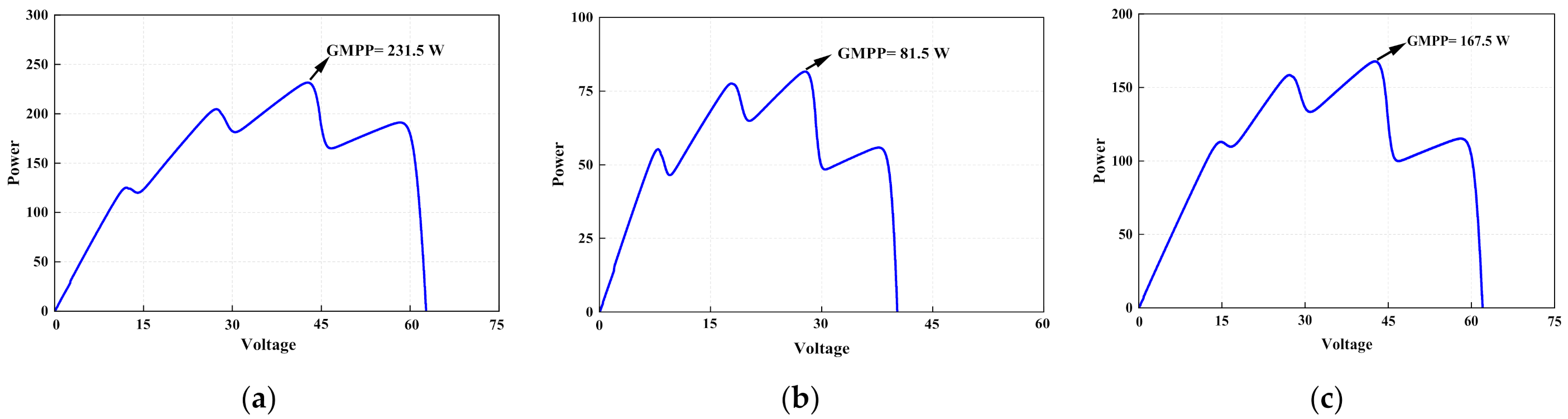
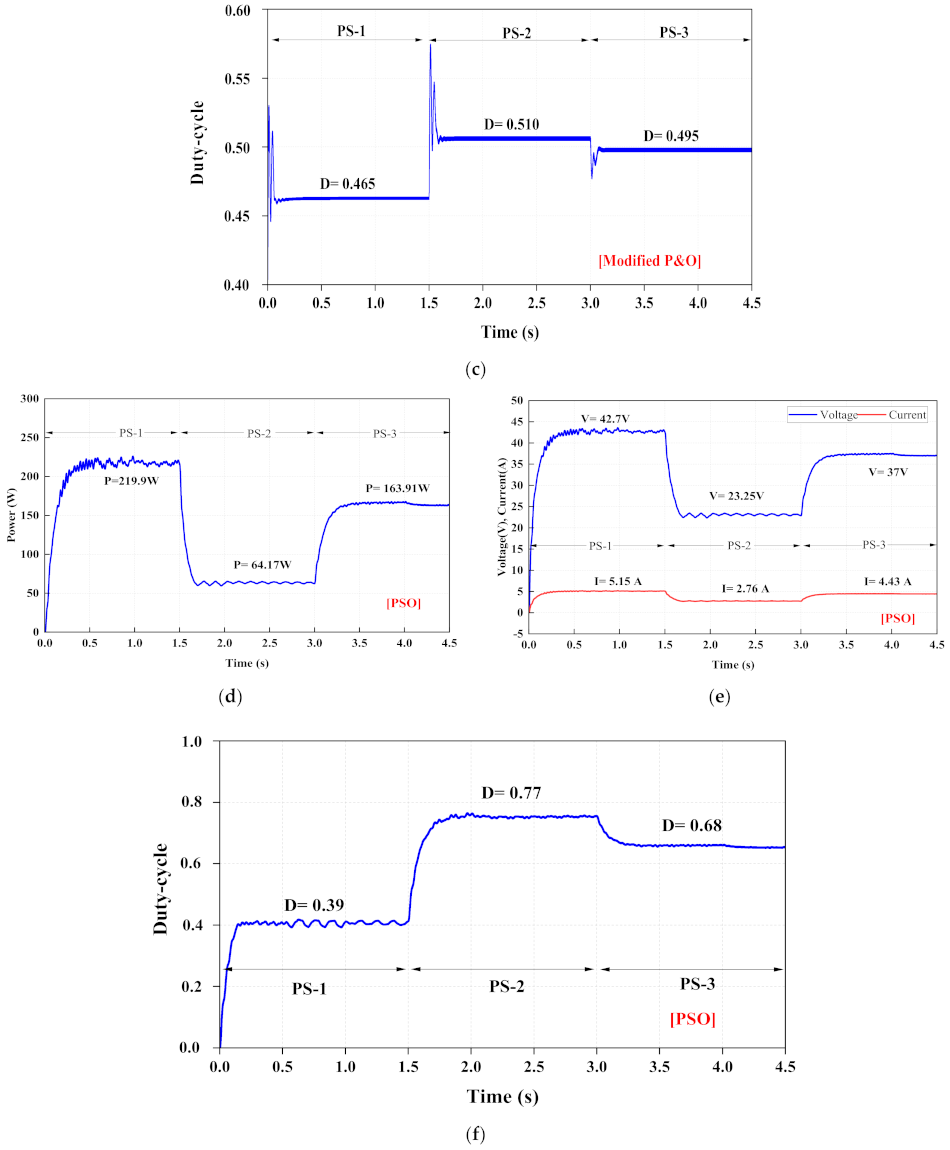
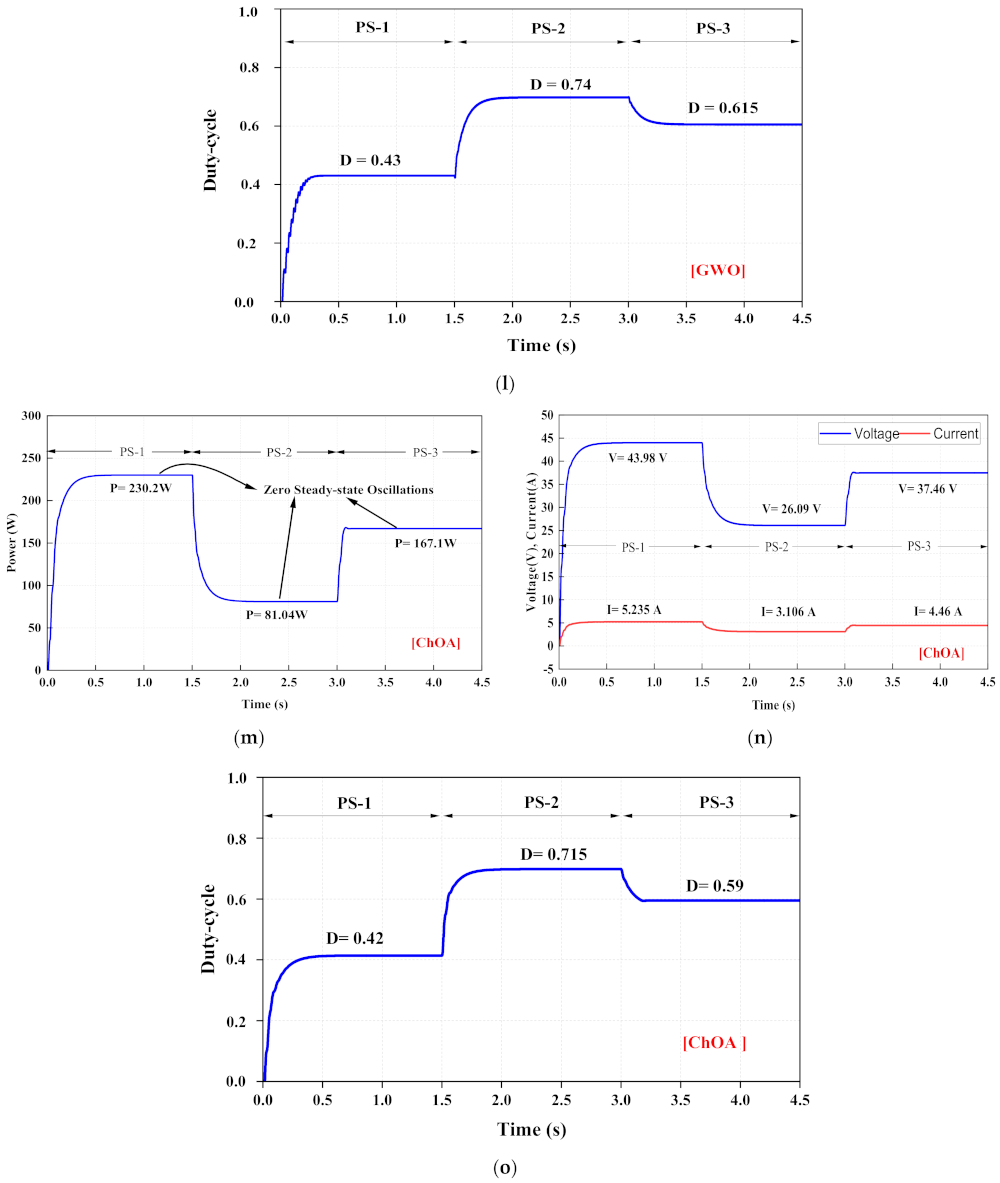
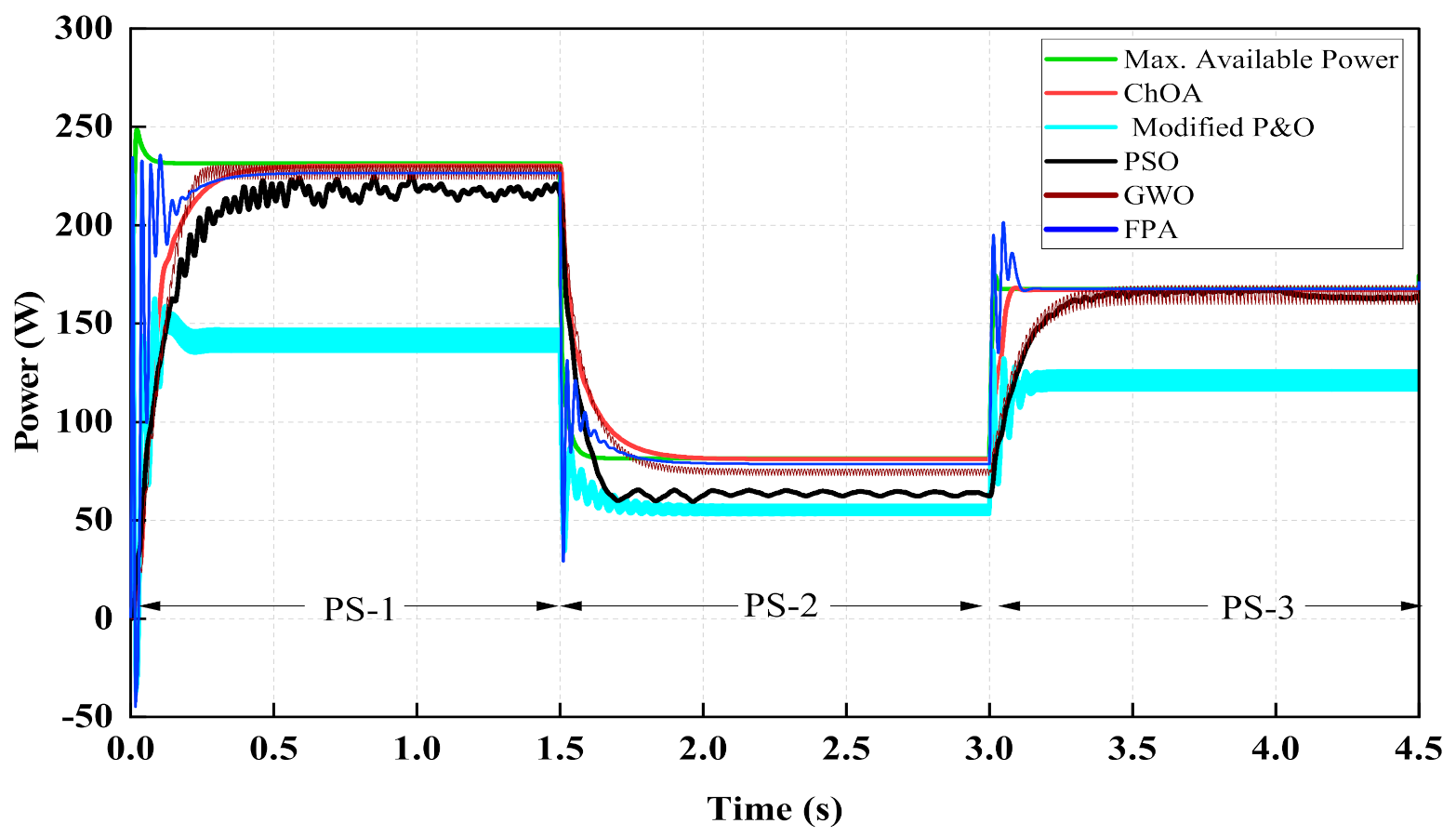
5.2. Partial Shading Conditions
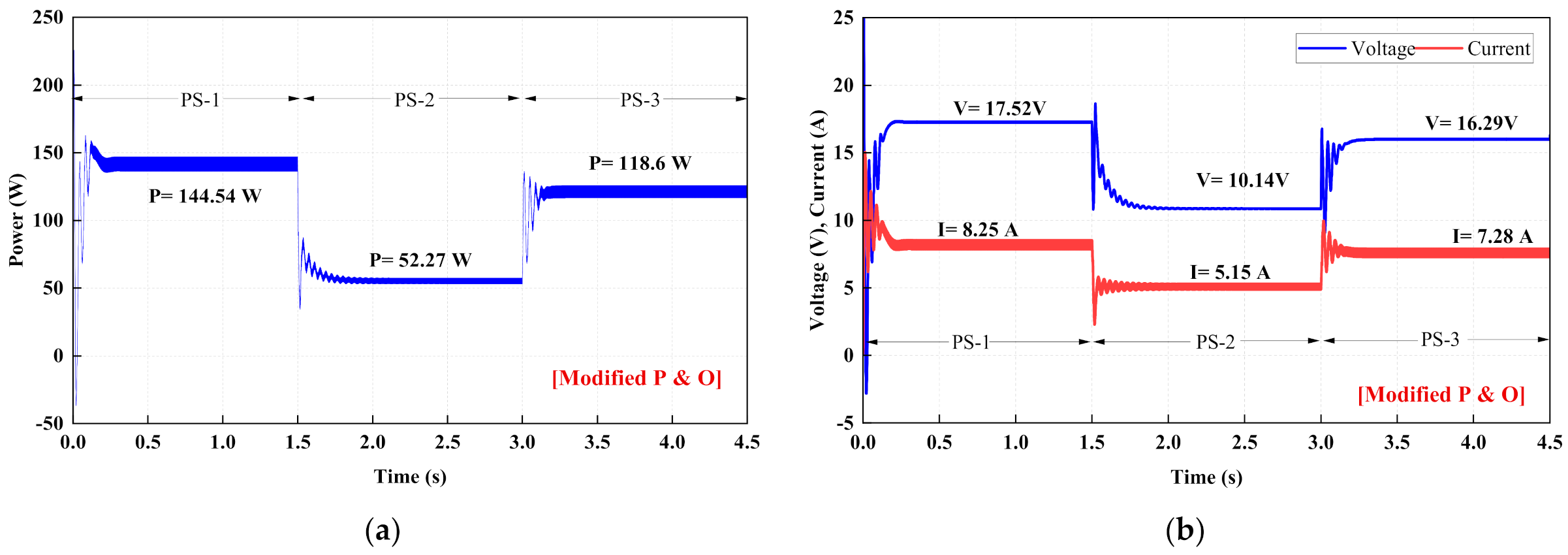
Comparative Analysis of Proposed ChOA with Modified P&O, PSO, FPA, and GWO Methods under Non-Uniform Irradiance Transition (PS-1→PS-2→PS-3)
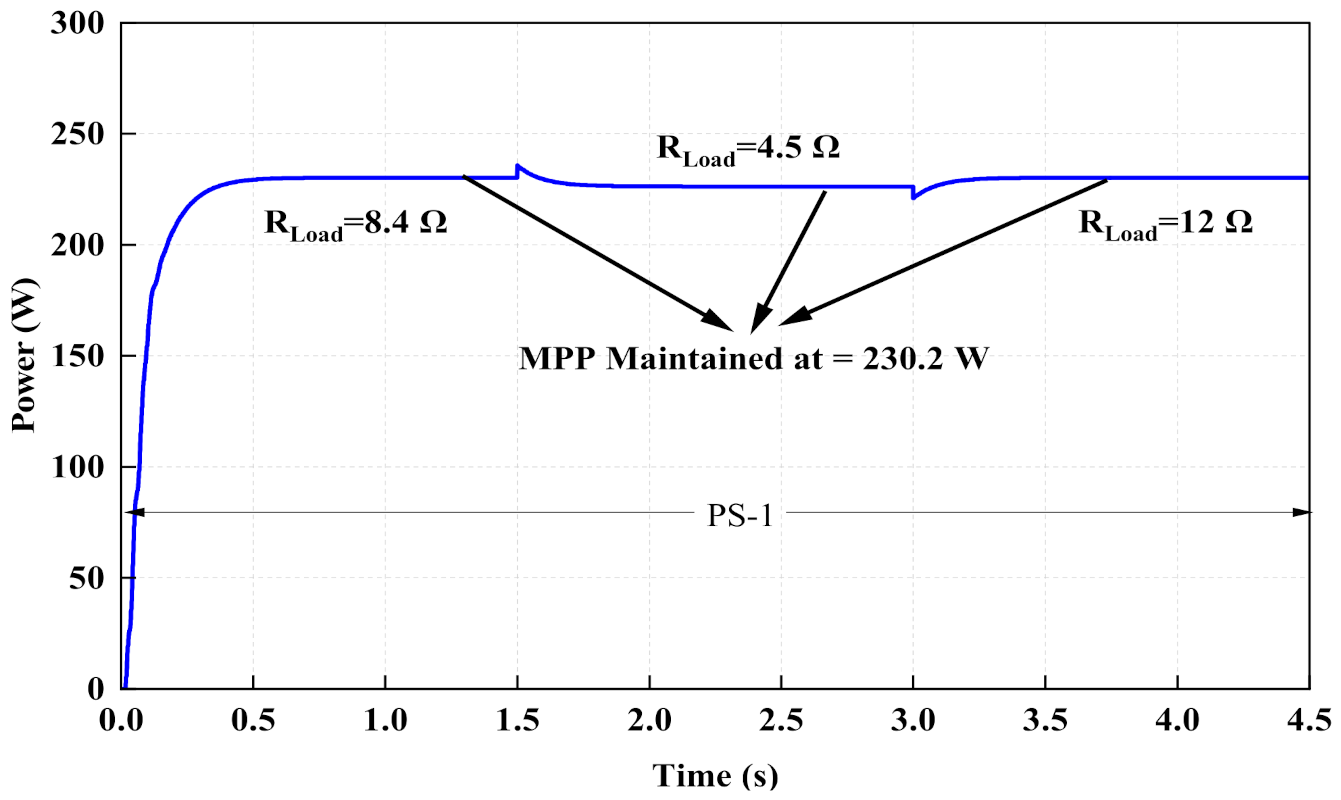
5.3. Load-Varying Conditions
6. Conclusions
7. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclatures
| GMPP | Global maximum power-point |
| MPPT | Maximum power point tracking |
| ChOA | Chimp optimization algorithm |
| P&O | Perturb and observe |
| PSO | Particle swarm optimization |
| GWO | Grey wolf optimization |
| FPA | Flower pollination algorithm |
| UI-1 | Uniform irradiance 1 |
| UI-2 | Uniform irradiance 2 |
| PS | Partial shading |
| PS-1 | Partial shading 1 |
| PS-2 | Partial shading 2 |
| PS-3 | Partial shading 3 |
| PSC | Partial shading conditions |
| PV | Photovoltaic |
| TCT | Total-cross-tied |
| CS | Competence square |
| MS | Magic square |
| IC | Incremental conductance |
| HC | Hill climbing |
| RCC | Ripple correlation control |
| FOC | Fractional open circuit |
| FSC | Fractional short circuit |
| LT-NI | Linear tangent and Neville interpolation |
| CSA | Crow search algorithm |
| MVPA | Most valuable player algorithm |
| FSSO | Flying squirrel search optimization |
| MPT | Maximum power trapezium |
| Ipv | Photo-generated current |
| Isat | Diode reverse saturation current |
| a | Ideality factor of the diode |
| q | Electron charge (1.6 × 10−19 C) |
| K | Boltzmann constant (1.3806503 × 10−23 J/K) |
| T | Temperature in Kelvin |
| OP | Operating point |
| UI | Uniform irradiance |
| UIC | Uniform irradiance conditions |
| LVC | Load varying conditions |
| ∆m | Change in the slope of load line |
| Dinit | Initial duty-cycle |
| Updated duty-cycle in case of load change | |
| osc_1 | Oscillation counter 1 |
| osc_2 | Oscillation counter 2 |
| Distance between the actual and desired operating voltage | |
| PRM-FC | Physical relocation of the module with fixed electrical connections |
| ‘σ’, ‘’ and ‘’ | Coefficient vectors of ChOA |
| Steady-state MPPT efficiency |
References
- Olowu, T.O.; Sundararajan, A.; Moghaddami, M.; Sarwat, A.I. Future challenges and mitigation methods for high photovoltaic penetration: A survey. Energies 2018, 11, 1782. [Google Scholar] [CrossRef] [Green Version]
- Pendem, S.R.; Mikkili, S. Modelling and performance assessment of PV array topologies under partial shading conditions to mitigate the mismatching power losses. Sol. Energy 2018, 160, 303–321. [Google Scholar] [CrossRef]
- Dhanalakshmi, B.; Rajasekar, N. A novel competence square based PV array reconfiguration technique for solar PV maximum power extraction. Energy Convers. Manag. 2018, 174, 897–912. [Google Scholar] [CrossRef]
- Cherukuri, S.K.; Kumar, B.P.; Raj, K.K.; Muthubalaji, S.; Devadasu, G.; Babu, T.S.; Alhelou, H.H. A Novel Array Configuration Technique for Improving the Power Output of the Partial Shaded Photovoltaic System. IEEE Access 2022, 10, 15056–15067. [Google Scholar] [CrossRef]
- Sharma, S.; Varshney, L.; Elavarasan, R.M.; Vardhan, A.S.; Vardhan, A.S.; Saket, R.K.; Subramaniam, U.; Hossain, E. Performance Enhancement of PV System Configurations Under Partial Shading Conditions Using MS Method. IEEE Access 2021, 9, 56630–56644. [Google Scholar] [CrossRef]
- Jazayeri, M.; Uysal, S.; Jazayeri, K. A comparative study on different photovoltaic array topologies under partial shading conditions. In Proceedings of the 2014 IEEE PES T&D Conference and Exposition, Chicago, IL, USA, 14–17 April 2014; pp. 1–5. [Google Scholar]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter. IEEE Trans. Ind. Electron. 2010, 58, 1154–1161. [Google Scholar] [CrossRef]
- Fapi, C.B.N.; Wira, P.; Kamta, M.; Badji, A.; Tchakounte, H. Real-time experimental assessment of Hill Climbing MPPT algorithm enhanced by estimating a duty cycle for PV system. Int. J. Renew. Energy Res. 2019, 9, 1180–1189. [Google Scholar]
- Esram, T.; Kimball, J.W.; Krein, P.T.; Chapman, P.L.; Midya, P. Dynamic maximum power point tracking of photovoltaic arrays using ripple correlation control. IEEE Trans. Power Electron. 2006, 21, 1282–1291. [Google Scholar] [CrossRef]
- Enslin, J.H.; Wolf, M.S.; Snyman, D.B.; Swiegers, W. Integrated photovoltaic maximum power point tracking converter. IEEE Trans. Ind. Electron. 1997, 44, 769–773. [Google Scholar] [CrossRef] [Green Version]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A new sensorless hybrid MPPT algorithm based on fractional short-circuit current measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar]
- Ahmed, J.; Salam, Z. A critical evaluation on maximum power point tracking methods for partial shading in PV systems. Renew. Sustain. Energy Rev. 2015, 47, 933–953. [Google Scholar] [CrossRef]
- Gupta, A.K.; Pachauri, R.K.; Maity, T.; Chauhan, Y.K.; Mahela, O.P.; Khan, B.; Gupta, P.K. Effect of Various Incremental Conductance MPPT Methods on the Charging of Battery Load Feed by Solar Panel. IEEE Access 2021, 9, 90977–90988. [Google Scholar] [CrossRef]
- Sundaram, B.M.; Manikandan, B.V.; Kumar, B.P.; Winston, D.P. Combination of novel converter topology and improved MPPT algorithm for harnessing maximum power from grid connected solar PV systems. J. Electr. Eng. Technol. 2019, 14, 733–746. [Google Scholar] [CrossRef]
- Bhukya, M.N.; Kota, V.R.; Depuru, S.R.; Reddy, M.P.P.; Reddy, G.H. An Effective Design and Implementation of Hybrid MPP Tracking Scheme Based on Linear Tangents & Neville Interpolation (LT-NI) Technique for Photovoltaic (PV) System. IEEE Access 2021, 9, 68266–68276. [Google Scholar]
- Houam, Y.; Terki, A.; Bouarroudj, N. An Efficient Metaheuristic Technique to Control the Maximum Power Point of a Partially Shaded Photovoltaic System Using Crow Search Algorithm (CSA). J. Electr. Eng. Technol. 2021, 16, 381–402. [Google Scholar] [CrossRef]
- Pillai, D.S.; Ram, J.P.; Ghias, A.M.; Mahmud, M.A.; Rajasekar, N. An Accurate, Shade Detection-Based Hybrid Maximum Power Point Tracking Approach for PV Systems. IEEE Trans. Power Electron. 2019, 35, 6594–6608. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Peddapati, S.; Palani, S. MPPT of PV systems under partial shaded conditions through a colony of flashing fireflies. IEEE Trans. Energy Convers. 2014, 29, 463–472. [Google Scholar]
- Hua, C.-C.; Zhan, Y.-J. A Hybrid Maximum Power Point Tracking Method without Oscillations in Steady-State for Photovoltaic Energy Systems. Energies 2021, 14, 5590. [Google Scholar] [CrossRef]
- Ostadrahimi, A.; Mahmoud, Y. Novel Spline-MPPT Technique for Photovoltaic Systems under Uniform Irradiance and Partial Shading Conditions. IEEE Trans. Sustain. Energy 2020, 12, 524–532. [Google Scholar] [CrossRef]
- Mobarak, M.H.; Bauman, J. A Fast Parabolic-Assumption Algorithm for Global MPPT of Photovoltaic Systems Under Partial Shading Conditions. IEEE Trans. Ind. Electron. 2021. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z.; Kermadi, M.; Afrouzi, H.N.; Ashique, R.H. A skipping adaptive P&O MPPT for fast and efficient tracking under partial shading in PV arrays. Int. Trans. Electr. Energy Syst. 2021, 31, e13017. [Google Scholar]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 2015, 7, 181–188. [Google Scholar] [CrossRef]
- Deboucha, H.; Shams, I.; Belaid, S.L.; Mekhilef, S. A Fast GMPPT Scheme Based on Collaborative Swarm Algorithm for Partially Shaded photovoltaic system. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 5571–5580. [Google Scholar] [CrossRef]
- Pervez, I.; Shams, I.; Mekhilef, S.; Sarwar, A.; Tariq, M.; Alamri, B. Most Valuable Player Algorithm Based Maximum Power Point Tracking for a Partially Shaded PV Generation System. IEEE Trans. Sustain. Energy 2021, 12, 1876–1890. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2019, 177, 306–316. [Google Scholar] [CrossRef]
- Kermadi, M.; Salam, Z.; Ahmed, J.; Berkouk, E.M. A high-performance global maximum power point tracker of PV system for rapidly changing partial shading conditions. IEEE Trans. Ind. Electron. 2020, 68, 2236–2245. [Google Scholar] [CrossRef]
- Ali, E.M.; Abdelsalam, A.K.; Youssef, K.H.; Hossam-Eldin, A.A. An Enhanced Cuckoo Search Algorithm Fitting for Photovoltaic Systems’ Global Maximum Power Point Tracking under Partial Shading Conditions. Energies 2021, 14, 7210. [Google Scholar] [CrossRef]
- Zhao, Z.; Cheng, R.; Yan, B.; Zhang, J.; Zhang, Z.; Zhang, M.; Lai, L.L. A dynamic particles MPPT method for photovoltaic systems under partial shading conditions. Energy Convers. Manag. 2020, 220, 113070. [Google Scholar] [CrossRef]
- Singh, N.; Gupta, K.K.; Jain, S.K.; Dewangan, N.K.; Bhatnagar, P. A Flying Squirrel Search Optimization for abb: MPPT under Partial Shaded Photovoltaic System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4963–4978. [Google Scholar] [CrossRef]
- Khishe, M.; Mosavi, M.R. Chimp optimization algorithm. Expert Syst. Appl. 2020, 149, 113338. [Google Scholar] [CrossRef]
- Yousri, D.; Thanikanti, S.B.; Balasubramanian, K.; Osama, A.; Fathy, A. Multi-objective grey wolf optimizer for optimal design of switching matrix for shaded PV array dynamic reconfiguration. IEEE Access 2020, 8, 159931–159946. [Google Scholar] [CrossRef]
- Varshney, S.K.; Khan, Z.A.; Husain, M.A.; Tariq, A. A comparative study and investigation of different diode models incorporating the partial shading effects. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 3145–3150. [Google Scholar]
- Tey, K.S.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B.; Oo, A.T.; Stojcevski, A. Improved differential evolution-based MPPT algorithm using SEPIC for PV systems under partial shading conditions and load variation. IEEE Trans. Ind. Inform. 2018, 14, 4322–4333. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description/Value |
|---|---|
| Capacitors [C_1, C_2] | [10 µF, 470 µF] |
| Inductance | 13 mH |
| Load Resistance | 8.4 Ohm |
| Switching Frequency | 1000 Hz |
| Parameters | Values at Standard Test Condition(STC) |
|---|---|
| Power at MPP (Pmp) | 57.377 W |
| Current at MPP (Imp) | 3.17 A |
| Voltage at MPP (Vmp) | 18.1 V |
| Short Circuit Current (Isc) | 3.58 A |
| Open Circuit Voltage (Voc) | 21.4 V |
| Pattern\No | Row 1 | Row 2 | Row 3 | Row 4 |
|---|---|---|---|---|
| STC | 1000 W/m2 | 1000 W/m2 | 1000 W/m2 | 1000 W/m2 |
| UI-1 | 700 W/m2 | 700 W/m2 | 700 W/m2 | 700 W/m2 |
| UI-2 | 500 W/m2 | 500 W/m2 | 500 W/m2 | 500 W/m2 |
| PS-1 | 1000 W/m2 | 700 W/m2 | 500 W/m2 | 300 W/m2 |
| PS-2 | 500 W/m2 | 300 W/m2 | 200 W/m2 | 100 W/m2 |
| PS-3 | 800 W/m2 | 600 W/m2 | 400 W/m2 | 200 W/m2 |
| MPPT Techniques | Max. Available Power | Tracked Power | Avg. Tracking Efficiency(%) |
|---|---|---|---|
| Modified P&O | PS-1 = 231.5 W, PS-2 = 81.5 W, PS-3 = 167.5 W | PS-1 = 144.54 W, PS-2 = 52.27 W, PS-3 = 118.6 W | 65.78% |
| PSO | PS-1 = 231.5 W, PS-2 = 81.5 W, PS-3 = 167.5 W | PS-1 = 219.9 W, PS-2 = 64.17 W, PS-3 = 163.91 W | 90.52% |
| FPA | PS-1 = 231.5 W, PS-2 = 81.5 W, PS-3 = 167.5 W | PS-1 = 229.6 W, PS-2 = 78.63 W, PS-3 = 164.1 W | 97.87% |
| GWO | PS-1 = 231.5 W, PS-2 = 81.5 W, PS-3 = 167.5 W | PS-1 = 230 W, PS-2 = 79.3 W, PS-3 = 165.7 W | 98.52% |
| ChOA | PS-1 = 231.5 W, PS-2 = 81.5 W, PS-3 = 167.5 W | PS-1 = 230.2 W, PS-2 = 81.04 W, PS-3 = 167.1 W | 99.54% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elahi, M.; Ashraf, H.M.; Kim, C.-H. An Improved Partial Shading Detection Strategy Based on Chimp Optimization Algorithm to Find Global Maximum Power Point of Solar Array System. Energies 2022, 15, 1549. https://doi.org/10.3390/en15041549
Elahi M, Ashraf HM, Kim C-H. An Improved Partial Shading Detection Strategy Based on Chimp Optimization Algorithm to Find Global Maximum Power Point of Solar Array System. Energies. 2022; 15(4):1549. https://doi.org/10.3390/en15041549
Chicago/Turabian StyleElahi, Muqaddas, Hafiz Muhammad Ashraf, and Chul-Hwan Kim. 2022. "An Improved Partial Shading Detection Strategy Based on Chimp Optimization Algorithm to Find Global Maximum Power Point of Solar Array System" Energies 15, no. 4: 1549. https://doi.org/10.3390/en15041549