
Sliding Mode Observer for State-of-Charge Estimation Using Hysteresis-Based Li-Ion Battery Model

 ,
,
Abstract
:1. Introduction
- Formalizing the hysteresis-based equivalent circuit model for Li-ion battery, based on which the charging and discharging processes are treated differently during the SoC estimation.
- A terminal sliding mode observer is designed with theoretical proof for estimating the SoC of a Li-ion battery in real time.
2. Rechargeable Battery Model
2.1. State-of-Charge and Open-Circuit Voltage Curve
2.2. Hysteresis Based Li-ion Battery Model
3. Real-Time Battery SoC Estimation Based on Terminal Sliding Mode Observer
3.1. Estimation of the Output Voltage
3.2. Estimation of the Open-Circuit Voltage
3.3. Estimation of the Polarization Voltage
4. Results and Discussion
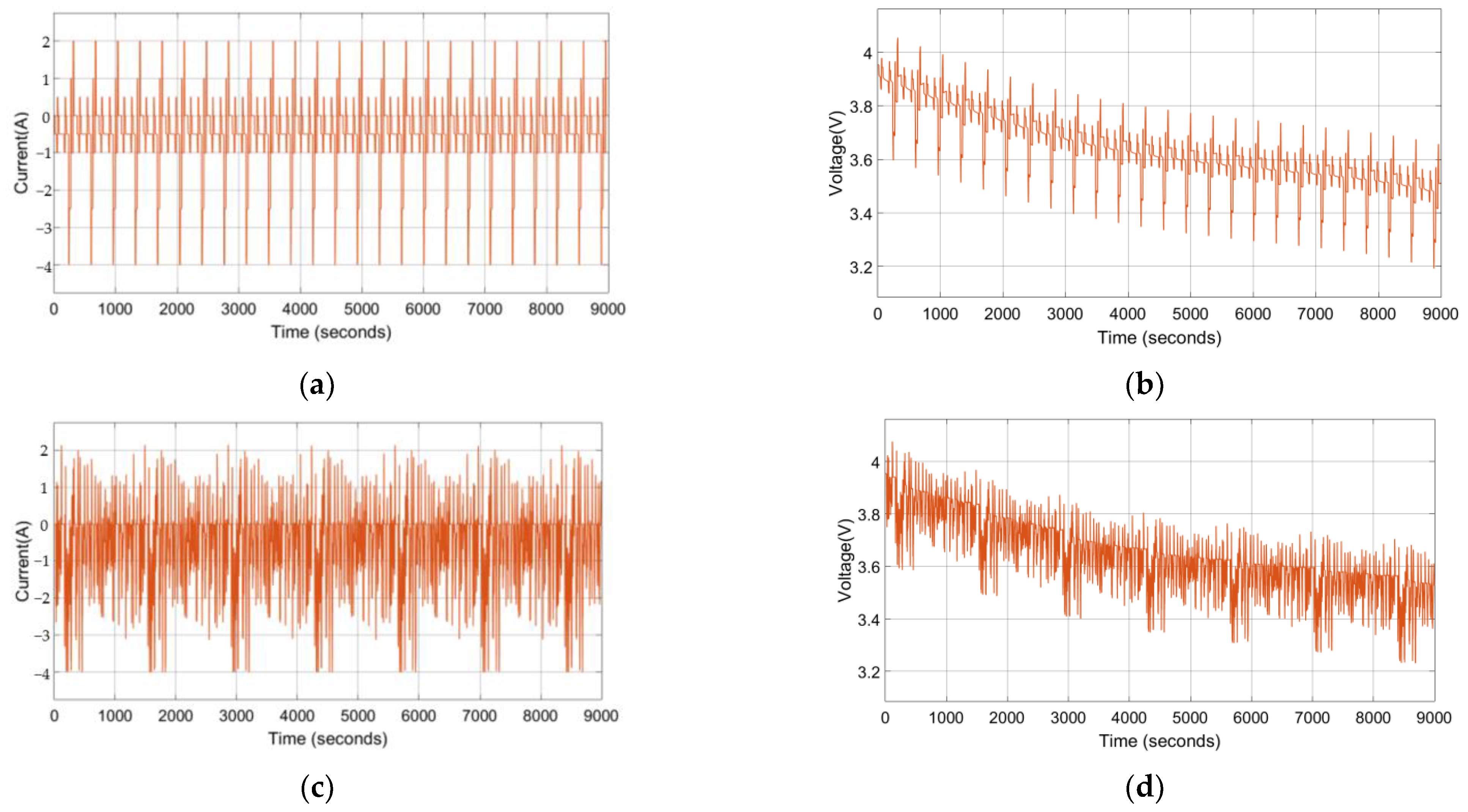
4.1. Li-ion Battery Test Samples
4.2. Performance Evaluation between Different Battery Models
4.3. Performance Evaluation between Different Observer Methods
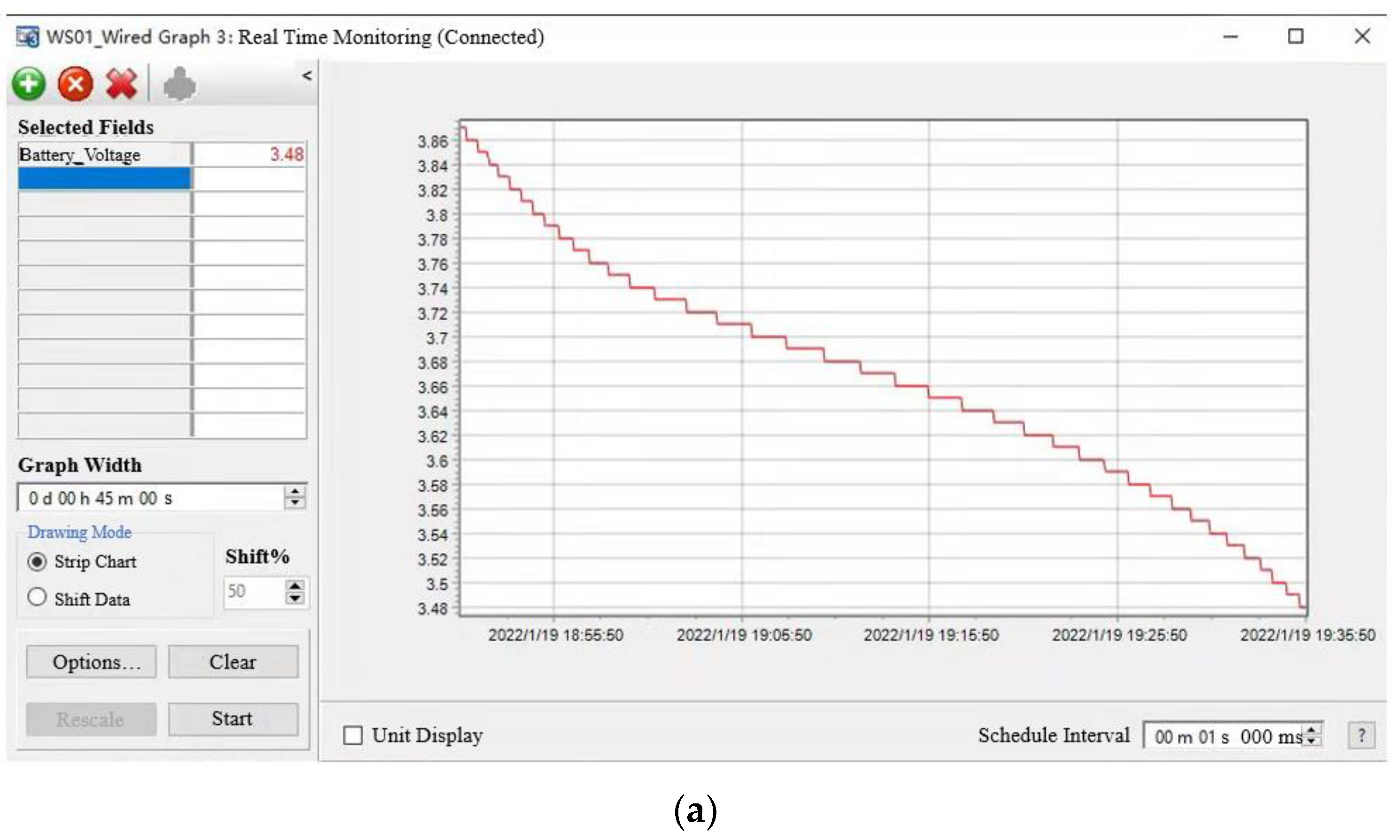
5. Automatic Monitoring System
- Data Acquisition
- Data Processing
- Data Publishing
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Diouf, B.; Pode, R. Potential of lithium-ion batteries in renewable energy. Renew. Energy 2015, 76, 375–380. [Google Scholar] [CrossRef]
- Aylor, J.H.; Thieme, A.; Johnso, B.W. A battery state-of-charge indicator for electric wheelchairs. IEEE Trans. Ind. Electron. 1992, 39, 398–409. [Google Scholar] [CrossRef]
- Xing, Y.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Barai, A.; Widanage, W.D.; Marco, J.; McGordon, A.; Jennings, P. A study of the open circuit voltage characterization technique and hysteresis assessment of lithium-ion cells. J. Power Sources 2015, 295, 99–107. [Google Scholar] [CrossRef]
- Kang, L.; Zhao, X.; Ma, J. A new neural network model for the state-of-charge estimation in the battery degradation process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Jiani, D.; Zhitao, L.; Youyi, W.; Changyun, W. A fuzzy logic-based model for Li-ion battery with SOC and temperature effect. In Proceedings of the 11th IEEE International Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 1333–1338. [Google Scholar]
- Saji, D.; Babu, P.S.; Ilango, K. SoC Estimation of Lithium Ion Battery Using Combined Coulomb Counting and Fuzzy Logic Method. In Proceedings of the 2019 4th International Conference on Recent Trends on Electronics, Information, Communication & Technology (RTEICT), Bangalore, India, 17–18 May 2019; pp. 948–952. [Google Scholar]
- Ipek, E.; Eren, M.K.; Yilmaz, M. State-of-charge estimation of li-ion battery cell using support vector regression and gradient boosting techniques. In Proceedings of the 2019 International Aegean Conference on Electrical Machines and Power Electronics (ACEMP) & 2019 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Istanbul, Turkey, 27–29 August 2019; pp. 604–609. [Google Scholar]
- Wang, T.; Chen, S.; Ren, H.; Zhao, Y. Model-based unscented Kalman filter observer design for lithium-ion battery state of charge estimation. Int. J. Energy Res. 2018, 42, 1603–1614. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, Z.; Ji, G. Lithium-ion battery state of charge estimation with model parameters adaptation using H∞ extended Kalman filter. Control Eng. Pract. 2018, 81, 114–128. [Google Scholar] [CrossRef]
- Linghu, J.; Kang, L.; Liu, M.; Luo, X.; Feng, Y.; Lu, C. Estimation for state-of-charge of lithium-ion battery based on an adaptive high-degree cubature Kalman filter. Energy 2019, 189, 116204. [Google Scholar] [CrossRef]
- Hu, X.; Sun, F.; Zou, Y. Estimation of state of charge of a lithium-ion battery pack for electric vehicles using an adaptive Luenberger observer. Energies 2010, 3, 1586–1603. [Google Scholar] [CrossRef]
- Barsali, S.; Ceraolo, M.; Li, J.; Lutzemberger, G.; Scarpelli, C. ELECTRIMACS 2019; Springer: Cham, Switzerland, 2020; pp. 655–667. [Google Scholar]
- Zou, C.; Hu, X.; Dey, S.; Zhang, L.; Tang, X. Nonlinear fractional-order estimator with guaranteed robustness and stability for lithium-ion batteries. IEEE Trans. Ind. Electron. 2017, 65, 5951–5961. [Google Scholar] [CrossRef]
- Feng, Y.; Xue, C.; Han, Q.L.; Han, F.; Du, J. Robust estimation for state-of-charge and state-of-health of lithium-ion batteries using integral-type terminal sliding-mode observers. IEEE Trans. Ind. Electron. 2019, 67, 4013–4023. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L. A battery state of charge estimation method using sliding mode observer. In Proceedings of the 2008 7th world congress on intelligent control and automation, Chongqing, China, 25–27 June 2008; pp. 989–994. [Google Scholar]
- Du, J.; Liu, Z.; Wang, Y.; Wen, C. An adaptive sliding mode observer for lithium-ion battery state of charge and state of health estimation in electric vehicles. Control Eng. Pract. 2016, 54, 81–90. [Google Scholar] [CrossRef]
- Ning, B.; Cao, B.; Wang, B.; Zou, Z. Adaptive sliding mode observers for lithium-ion battery state estimation based on parameters identified online. Energy 2018, 153, 732–742. [Google Scholar] [CrossRef]
- Chen, M.; Han, F.; Shi, L.; Feng, Y.; Xue, C.; Li, C. Accurate Estimation on the State-of-Charge of Lithium-Ion Battery Packs. In Proceedings of the International Conference on Broadband Communications, Networks and Systems, Virtual Event, 28–29 October 2021; pp. 251–262. [Google Scholar]
- Huang, C.; Wang, Z.; Zhao, Z.; Wang, L.; Lai, C.S.; Wang, D. Robustness evaluation of extended and unscented Kalman filter for battery state of charge estimation. IEEE Access 2018, 6, 27617–27628. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, B.; Sun, W.; Xu, Z.; Zheng, W. A modified model based state of charge estimation of power lithium-ion batteries using unscented Kalman filter. J. Power Sources 2014, 270, 619–626. [Google Scholar] [CrossRef]
- Luo, Y.; Qi, P.; Kan, Y.; Huang, J.; Huang, H.; Luo, J.; Wang, J.; Wei, Y.; Xiao, R.; Zhao, S. State of charge estimation method based on the extended Kalman filter algorithm with consideration of time-varying battery parameters. Int. J. Energy Res. 2020, 44, 10538–10550. [Google Scholar] [CrossRef]
- Zheng, Y.; Gao, W.; Ouyang, M.; Lu, L.; Zhou, L.; Han, X. State-of-charge inconsistency estimation of lithium-ion battery pack using mean-difference model and extended Kalman filter. J. Power Sources 2018, 383, 50–58. [Google Scholar] [CrossRef]
- Ma, Y.; Li, B.; Xie, Y.; Chen, H. Estimating the state of charge of lithium-ion battery based on sliding mode observer. IFAC-PapersOnLine 2016, 49, 54–61. [Google Scholar] [CrossRef]
- Kim, I.S. Nonlinear state of charge estimator for hybrid electric vehicle battery. IEEE Trans. Power Electron. 2008, 23, 2027–2034. [Google Scholar]
- Dey, S.; Ayalew, B.; Pisu, P. Nonlinear robust observers for state-of-charge estimation of lithium-ion cells based on a reduced electrochemical model. IEEE Trans. Control Syst. Technol. 2015, 23, 1935–1942. [Google Scholar] [CrossRef]
- Zheng, F.; Xing, Y.; Jiang, J.; Sun, B.; Kim, J.; Pecht, M. Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries. Appl. Energy 2016, 183, 513–525. Available online: https://web.calce.umd.edu/batteries/data.htm (accessed on 1 April 2022). [CrossRef]
- Biswas, A.; Gu, R.; Kollmeyer, P.; Ahmed, R.; Emadi, A. Simultaneous state and parameter estimation of li-ion battery with one state hysteresis model using augmented unscented kalman filter. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 1065–1070. [Google Scholar]
- HUAIDIAN. Available online: https://www.yiqi800.com/huaidian/ (accessed on 13 February 2022).
- CR1000X Measurement and Control Datalogger. Available online: https://www.campbellsci.com/cr1000x (accessed on 13 February 2022).
- CRBasic Editor Stand-Alone Installation for CRBasic Editor. Available online: https://www.campbellsci.com/crbasiceditor (accessed on 13 February 2022).
- LoggerNet Datalogger Support Software. Available online: https://www.campbellsci.com/loggernet (accessed on 13 February 2022).
- Four-Faith. Available online: http://www.four-faith.com/ (accessed on 13 February 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Type | LNMC/Graphite |
|---|---|
| Nominal capacity | 2000 mAh |
| Nominal voltage | 3.6 V |
| Charging cut-off voltage | 4.2 V |
| Discharging cut-off voltage | 2.5 V |
| Maximum current | 22 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Han, F.; Shi, L.; Feng, Y.; Xue, C.; Gao, W.; Xu, J. Sliding Mode Observer for State-of-Charge Estimation Using Hysteresis-Based Li-Ion Battery Model. Energies 2022, 15, 2658. https://doi.org/10.3390/en15072658
Chen M, Han F, Shi L, Feng Y, Xue C, Gao W, Xu J. Sliding Mode Observer for State-of-Charge Estimation Using Hysteresis-Based Li-Ion Battery Model. Energies. 2022; 15(7):2658. https://doi.org/10.3390/en15072658
Chicago/Turabian StyleChen, Mengying, Fengling Han, Long Shi, Yong Feng, Chen Xue, Weijie Gao, and Jinzheng Xu. 2022. "Sliding Mode Observer for State-of-Charge Estimation Using Hysteresis-Based Li-Ion Battery Model" Energies 15, no. 7: 2658. https://doi.org/10.3390/en15072658
APA StyleChen, M., Han, F., Shi, L., Feng, Y., Xue, C., Gao, W., & Xu, J. (2022). Sliding Mode Observer for State-of-Charge Estimation Using Hysteresis-Based Li-Ion Battery Model. Energies, 15(7), 2658. https://doi.org/10.3390/en15072658