
A Group-Based Droop Control Strategy Considering Pitch Angle Protection to Deloaded Wind Farms


Abstract
:1. Introduction
2. Cooperative Deloading Scheme
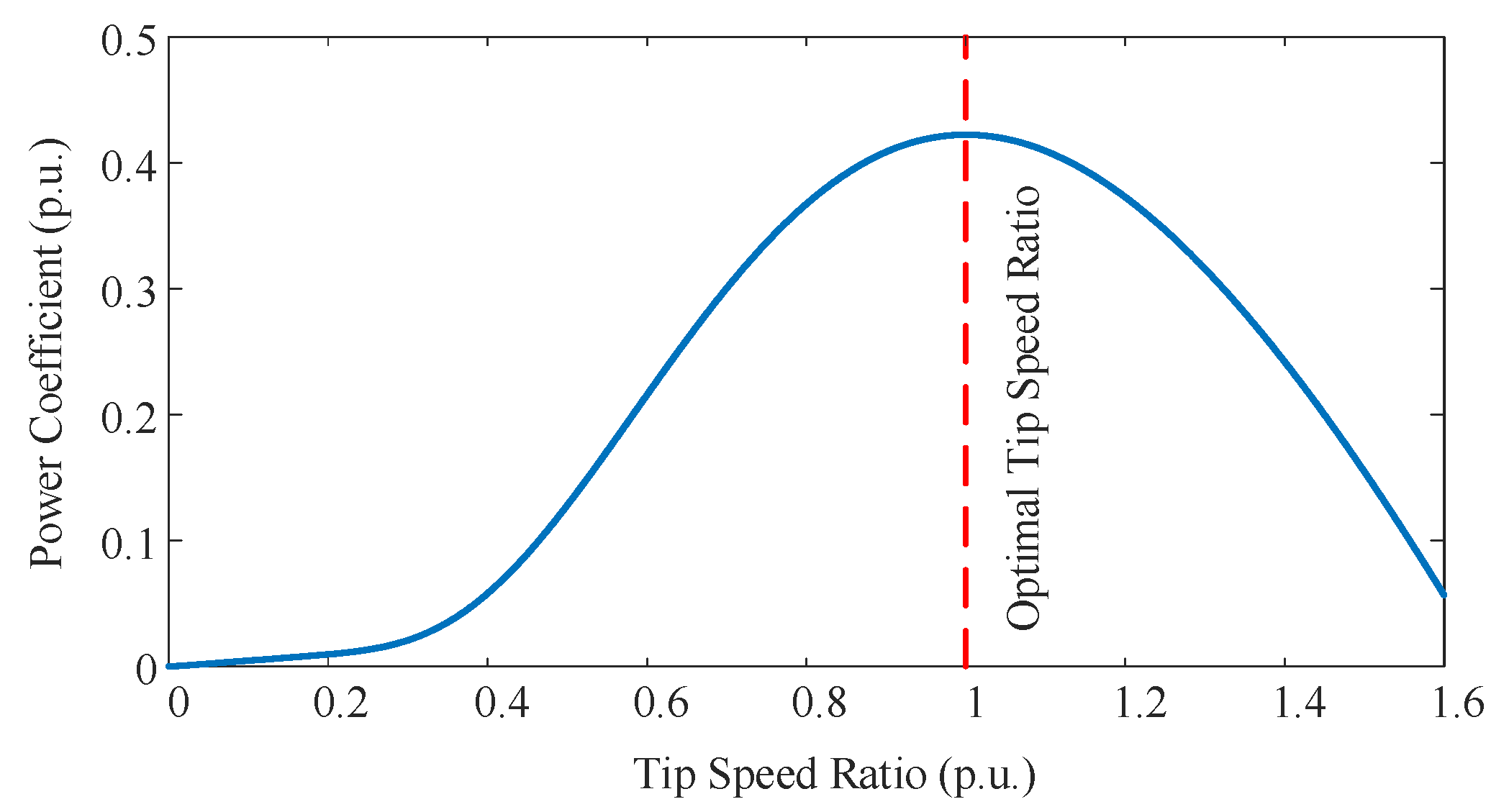
2.1. MPPT Control Principle
2.2. Coordinated Deloading Scheme
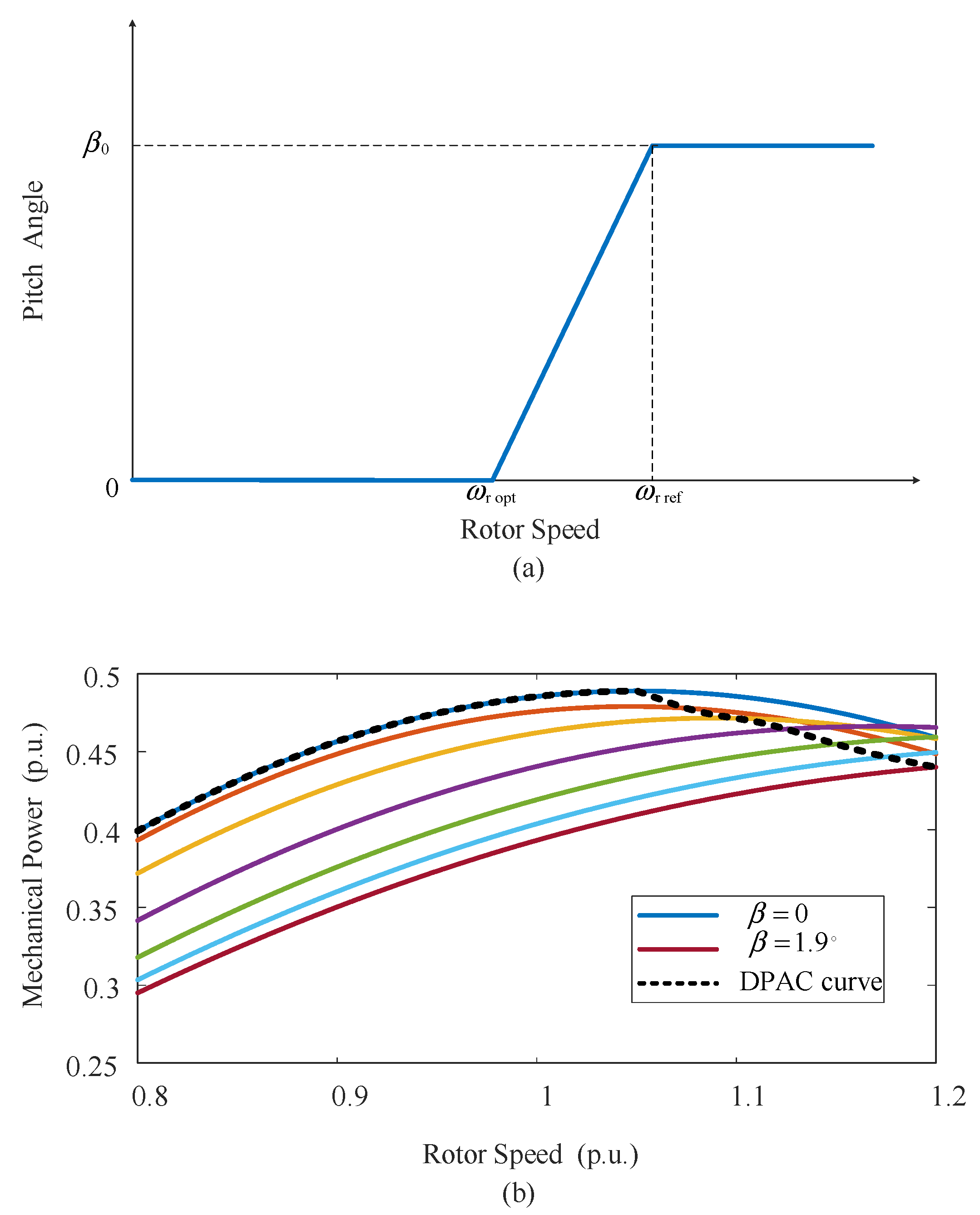
2.3. The Developed Pitch Angle Control
3. Evaluation of Frequency Regulation Capability
4. The Group-Based Droop Control
4.1. Total Droop Coefficient of the WF
4.2. Total Droop Coefficients of the Groups
4.3. Droop Coefficients of WTGs
5. Case Studies
5.1. Case 1: Small Load Disturbance
5.2. Case 2: Large Load Disturbance
5.3. Case 3: Wind Disturbance
5.4. Case 4: Random Wind Conditions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vargas, S.A.; Esteves, G.R.T.; Maçaira, P.M.; Bastos, B.Q.; Cyrino Oliveira, F.L.; Souza, R.C. Wind Power Generation: A Review and a Research Agenda. J. Clean. Prod. 2019, 218, 850–870. [Google Scholar] [CrossRef]
- Ye, L.; Zhang, C.; Xue, H.; Li, J.; Lu, P.; Zhao, Y. Study of Assessment on Capability of Wind Power Accommodation in Regional Power Grids. Renew. Energy 2019, 133, 647–662. [Google Scholar] [CrossRef]
- Kumar, D.; Chatterjee, K. A Review of Conventional and Advanced MPPT Algorithms for Wind Energy Systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Hu, L.; Xue, F.; Qin, Z.; Shi, J.; Qiao, W.; Yang, W.; Yang, T. Sliding Mode Extremum Seeking Control Based on Improved Invasive Weed Optimization for MPPT in Wind Energy Conversion System. Appl. Energy 2019, 248, 567–575. [Google Scholar] [CrossRef]
- Bonfiglio, A.; Invernizzi, M.; Labella, A.; Procopio, R. Design and Implementation of a Variable Synthetic Inertia Controller for Wind Turbine Generators. IEEE Trans. Power Syst. 2019, 34, 754–764. [Google Scholar] [CrossRef]
- Cheng, Y.; Azizipanah-Abarghooee, R.; Azizi, S.; Ding, L.; Terzija, V. Smart Frequency Control in Low Inertia Energy Systems Based on Frequency Response Techniques: A Review. Appl. Energy 2020, 279, 115798. [Google Scholar] [CrossRef]
- Yang, D.; Jin, Z.; Zheng, T.; Jin, E. An Adaptive Droop Control Strategy with Smooth Rotor Speed Recovery Capability for Type III Wind Turbine Generators. Int. J. Electr. Power Energy Syst. 2022, 135, 107532. [Google Scholar] [CrossRef]
- Boyle, J.; Littler, T.; Muyeen, S.M.; Foley, A.M. An Alternative Frequency-droop Scheme for Wind Turbines That Provide Primary Frequency Regulation via Rotor Speed Control. Int. J. Electr. Power. Energy Syst. 2021, 133, 107219. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, W.; Hu, Y.; Dzung, P.Q. Frequency Regulation at a Wind Farm Using Time-varying Inertia and Droop Controls. IEEE Trans. Ind. Appl. 2019, 55, 213–224. [Google Scholar] [CrossRef]
- Van de Vyver, J.; De Kooning, J.D.M.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop Control as an Alternative Inertial Response Strategy for the Synthetic Inertia on Wind Turbines. IEEE Trans. Power Syst. 2016, 31, 1129–1138. [Google Scholar] [CrossRef]
- Prakash, V.; Kushwaha, P.; Sharma, K.C.; Bhakar, R. Frequency Response Support Assessment from Uncertain Wind Generation. Int. J. Electr. Power Energy Syst. 2022, 134, 107465. [Google Scholar] [CrossRef]
- Hafiz, F.; Abdennour, A. Optimal Use of Kinetic Energy for the Inertial Support from Variable Speed Wind Turbines. Renew. Energy 2015, 80, 629–643. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Z.; Jiang, Q. Optimal Control Method for Wind Farm to Support Temporary Primary Frequency Control with Minimised Wind Energy Cost. IET Renew. Power Gener. 2015, 9, 350–359. [Google Scholar] [CrossRef]
- Yang, D.; Kim, J.; Kang, Y.C.; Muljadi, E.; Zhang, N.; Hong, J.; Song, S.; Zheng, T. Temporary Frequency Support of a DFIG for High Wind Power Penetration. IEEE Trans. Power Syst. 2018, 33, 3428–3437. [Google Scholar] [CrossRef]
- Altin, M.; Hansen, A.D.; Barlas, T.K.; Das, K.; Sakamuri, J.N. Optimization of Short-term Overproduction Response of Variable Speed Wind Turbines. IEEE Trans. Sustain. Energy 2018, 9, 1732–1739. [Google Scholar] [CrossRef]
- Ruttledge, L.; Flynn, D. Emulated Inertial Response from Wind Turbines: Gain Scheduling and Resource Coordination. IEEE Trans. Power Syst. 2016, 31, 3747–3755. [Google Scholar] [CrossRef]
- Wang, S.; Tomsovic, K. A Novel Active Power Control Framework for Wind Turbine Generators to Improve Frequency Response. IEEE Trans. Power Syst. 2018, 33, 6579–6589. [Google Scholar] [CrossRef]
- Wilches-Bernal, F.; Chow, J.H.; Sanchez-Gasca, J.J. A Fundamental Study of Applying Wind Turbines for Power System Frequency Control. IEEE Trans. Power Syst. 2016, 31, 1496–1505. [Google Scholar] [CrossRef]
- Liu, Z.; He, H.; Jiang, S.; Yu, H.; Xiao, S. The Effects of Wind Turbine and Energy Storage Participating in Frequency Regulation on System Frequency Response. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 283–288. [Google Scholar]
- Lyu, X.; Zhao, J.; Jia, Y.; Xu, Z.; Wong, K.P. Coordinated Control Strategies of PMSG-based Wind Turbine for Smoothing Power Fluctuations. IEEE Trans. Power Syst. 2019, 34, 391–401. [Google Scholar] [CrossRef]
- Ye, H.; Pei, W.; Qi, Z. Analytical Modeling of Inertial and Droop Responses from a Wind Farm for Short-term Frequency Regulation in Power Systems. IEEE Trans. Power Syst. 2016, 31, 3414–3423. [Google Scholar] [CrossRef]
- Fernández-Bustamante, P.; Barambones, O.; Calvo, I.; Napole, C. Provision of Frequency Response from Wind Farms: A Review. Energies 2021, 14, 6689. [Google Scholar] [CrossRef]
- Abraham, A.; Hong, J. Dynamic Wake Modulation Induced by Utility-scale Wind Turbine Operation. Appl. Energy 2020, 257, 114003. [Google Scholar] [CrossRef]
- Gao, X.; Wang, T.; Li, B.; Sun, H.; Yang, H.; Han, Z.; Wang, Y.; Zhao, F. Investigation of Wind Turbine Performance Coupling Wake and Topography Effects Based on LiDAR Measurements and SCADA Data. Appl. Energy 2019, 255, 113816. [Google Scholar] [CrossRef]
- Brogna, R.; Feng, J.; Sørensen, J.N.; Shen, W.; Porté-Agel, F. A New Wake Model and Comparison of Eight Algorithms for Layout Optimization of Wind Farms in Complex Terrain. Appl. Energy 2019, 259, 114189. [Google Scholar] [CrossRef]
- Aziz, A.; Oo, A.M.T.; Stojcevski, A. Frequency regulation capabilities in wind power plant. Sustain. Energy Technol. Assess. 2018, 26, 47–76. [Google Scholar] [CrossRef]
- Choi, S.; Kang, Y.C.; Kim, K.; Lee, Y.; Terzija, V. A Frequency-responsive Power-smoothing Scheme of a Doubly-fed Induction Generator for Enhancing the Energy-absorbing Capability. Int. J. Electr. Power Energy Syst. 2021, 131, 107053. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Zhang, J.; Wong, K.P. Variable Gain Control Scheme of DFIG-based Wind Farm for Over-frequency Support. Renew. Energy 2018, 120, 379–391. [Google Scholar] [CrossRef]
- Lee, J.; Muljadi, E.; Srensen, P.; Kang, Y.C. Releasable Kinetic Energy-based Inertial Control of a DFIG Wind Power Plant. IEEE Trans. Sustain. Energy 2016, 7, 279–288. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Primary Frequency Regulation by Deloaded Wind Turbines Using Variable Droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Mahish, P.; Pradhan, A.K. Distributed Synchronized Control in Grid Integrated Wind Farms to Improve Primary Frequency Regulation. IEEE Trans. Power Syst. 2020, 35, 362–373. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Frequency Dependent Strategy for Mitigating Wind Power Fluctuations of a Doubly-fed Induction Generator Wind Turbine Based on Virtual Inertia Control and Blade Pitch Angle Regulation. Renew. Energy 2018, 128, 108–124. [Google Scholar] [CrossRef]
- Ding, L.; Yin, S.; Wang, T.; Jiang, J.; Cheng, F.; Si, J. Integrated Frequency Control Strategy of DFIGs Based on Virtual Inertia and Over-speed Control. Power Syst. Technol. 2015, 35, 2385–2391. [Google Scholar]
- Datta, U.; Kalam, A.; Shi, J. Frequency Performance Analysis of Multi-gain Droop Controlled DFIG in an Isolated Microgrid Using Real-time Digital Simulaton. Eng. Sci. Technol. Int. J. 2020, 23, 1028–1041. [Google Scholar]
- Hwang, M.; Muljadi, E.; Park, J.; Sørensen, P.; Kang, Y.C. Dynamic Droop–based Inertial Control of a Doubly-fed Induction Generator. IEEE Trans. Sustain. Energy 2016, 7, 924–933. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, L.; Yao, Y.; Yu, X.; Yang, Y.; Li, D. Virtual Inertia Coordinated Allocation Method Considering Inertia Demand and Wind Turbine Inertia Response Capability. Energies 2021, 14, 5002. [Google Scholar] [CrossRef]
- Zafran, M.; Khan, L.; Khan, Q.; Ullah, S.; Sami, I. Finite-Time Fast Dynamic Terminal Sliding Mode Maximum Power Point Tracking Control Paradigm for Permanent Magnet Synchronous Generator-Based Wind Energy Conversion System. Appl. Sci. 2020, 10, 6361. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Speed (m/s) | 10% Deloading | 20% Deloading |
|---|---|---|
| Deloading Pitch Angle
(Degree) | ||
| 10.4 | 1.947 | 2.899 |
| 10.7 | 1.806 | 2.753 |
| 11.0 | 1.649 | 2.553 |
| 11.3 | 1.493 | 2.308 |
| 11.6 | 1.347 | 2.042 |
| 11.9 | 1.216 | 1.788 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wang, P.; Zhao, T.; Fan, Z.; Pan, H. A Group-Based Droop Control Strategy Considering Pitch Angle Protection to Deloaded Wind Farms. Energies 2022, 15, 2722. https://doi.org/10.3390/en15082722
Liu H, Wang P, Zhao T, Fan Z, Pan H. A Group-Based Droop Control Strategy Considering Pitch Angle Protection to Deloaded Wind Farms. Energies. 2022; 15(8):2722. https://doi.org/10.3390/en15082722
Chicago/Turabian StyleLiu, Hui, Peng Wang, Teyang Zhao, Zhenggang Fan, and Houlin Pan. 2022. "A Group-Based Droop Control Strategy Considering Pitch Angle Protection to Deloaded Wind Farms" Energies 15, no. 8: 2722. https://doi.org/10.3390/en15082722
APA StyleLiu, H., Wang, P., Zhao, T., Fan, Z., & Pan, H. (2022). A Group-Based Droop Control Strategy Considering Pitch Angle Protection to Deloaded Wind Farms. Energies, 15(8), 2722. https://doi.org/10.3390/en15082722