
Numerical Simultaneous Determination of Non-Uniform Soot Temperature and Volume Fraction from Visible Flame Images


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
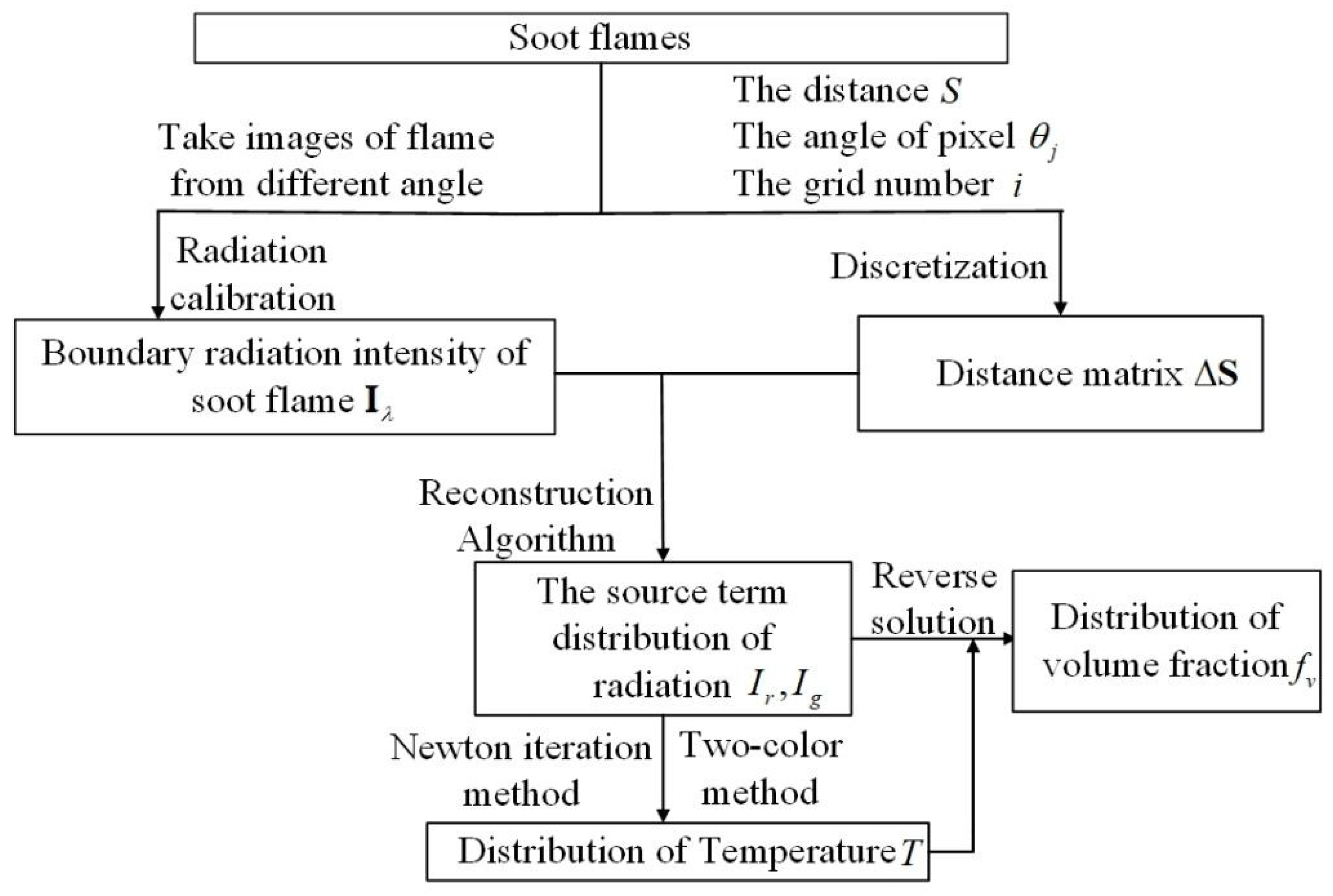
2. Reconstruction Principle
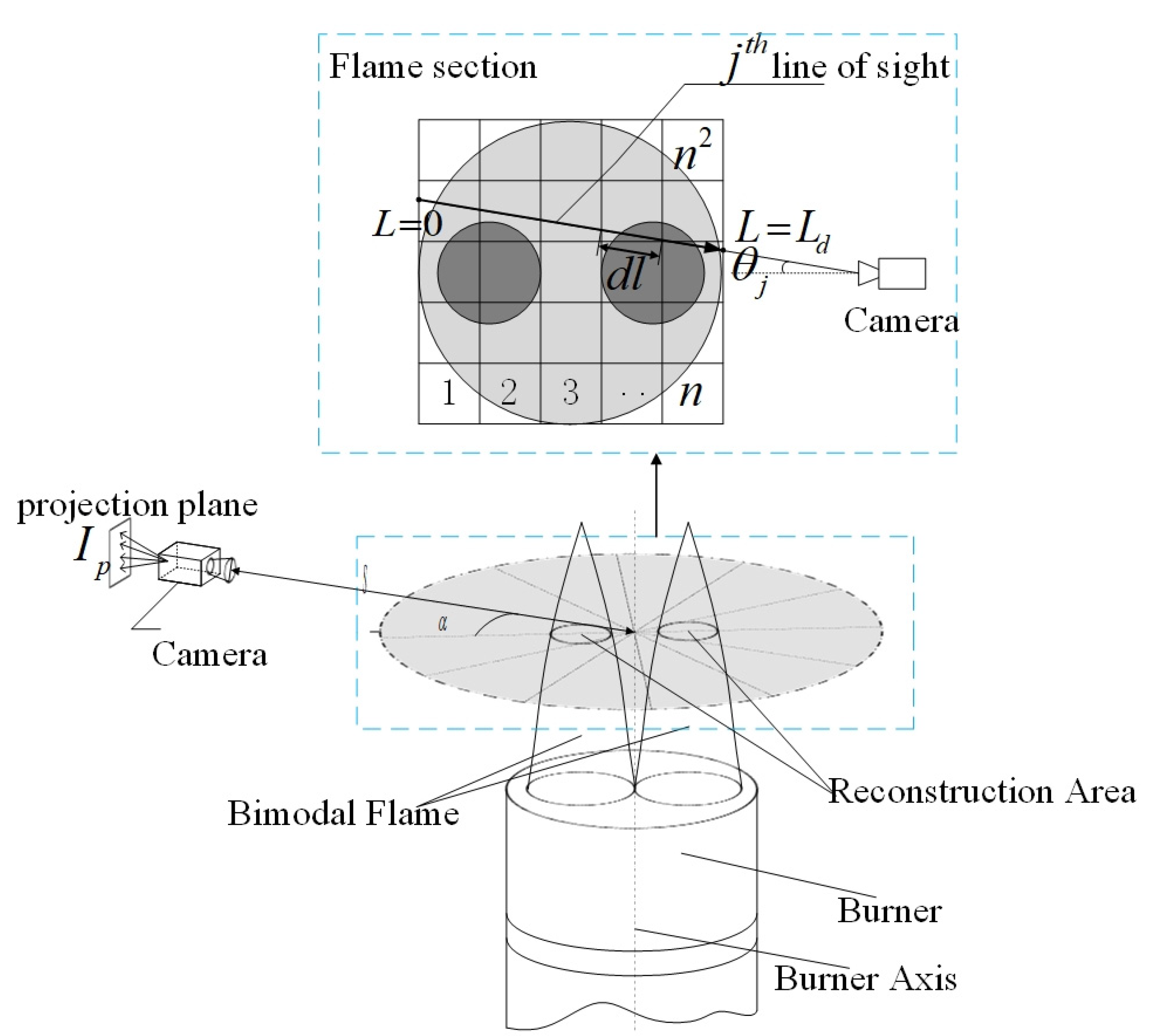
2.1. Radiation Imaging Models
2.2. Direct Problem
2.3. Inverse Problem
2.3.1. LSQR Algorithm
2.3.2. Tikhonov-Regularization Algorithm
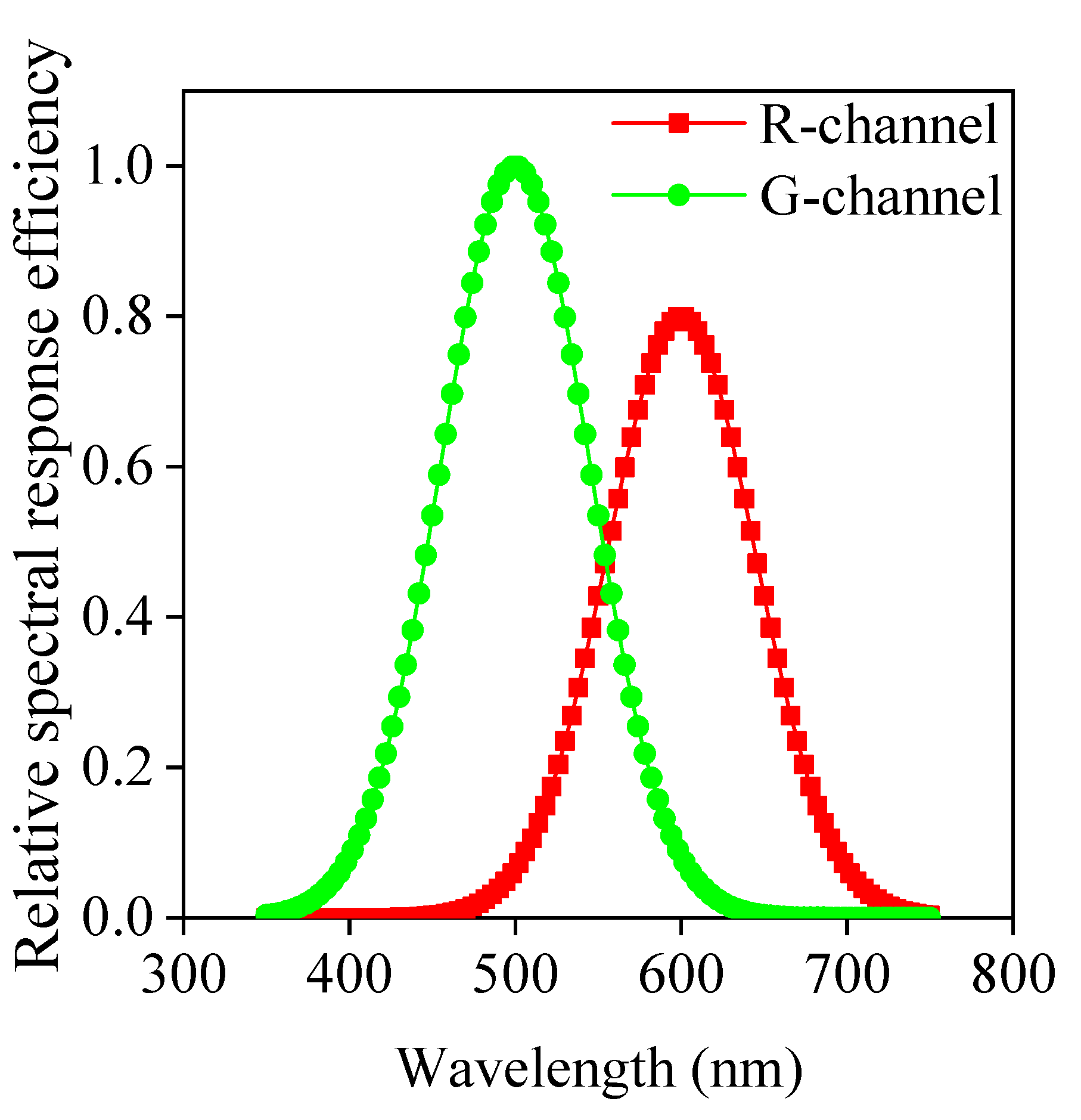
2.3.3. Two-Color Method
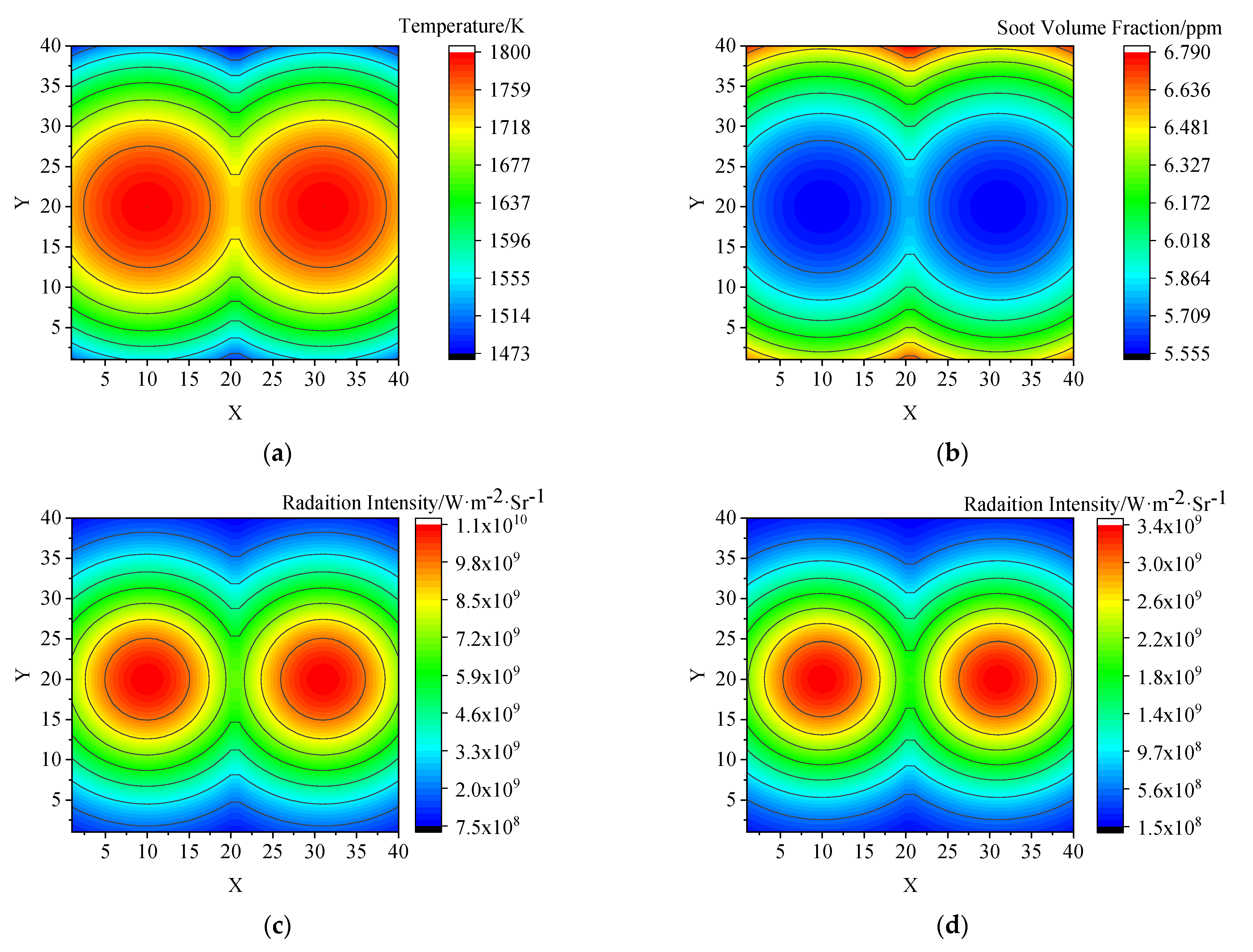
3. Simulated Object
4. Results and Discussion
4.1. Influence of the Number of Cameras
4.2. Effect of Measurement Noise
4.3. Error of Camera-Separation Angle
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, T.; Bessler, W.G.; Kronemayer, H.; Schulz, C.; Jeffries, J.B. Quantitative temperature measurements in high-pressure flames with multiline NO-LIF thermometry. Appl. Opt. 2005, 44, 6718–6728. [Google Scholar] [CrossRef]
- Chen, H.Y.; Hou, Y.Q.; Wang, X.; Pan, Z.X.; Xu, H.M. Characterization of In-Cylinder Combustion Temperature Based on a Flame-Image Processing Technique. Energies 2019, 12, 2386. [Google Scholar] [CrossRef] [Green Version]
- Li, W.H.; Lou, C.; Sun, Y.P.; Zhou, H.C. Estimation of radiative properties and temperature distributions in coal-fired boiler furnaces by a portable image processing system. Exp. Therm. Fluid Sci. 2011, 35, 416–421. [Google Scholar] [CrossRef]
- Loboda, E.L.; Reino, V.V.; Agafontsev, M.V. Choice of a spectral range for measuring temperature fields in a flame and recording high-temperature objects screened by the flame using ir diagnostic methods. Russ. Phys. J. 2015, 58, 278–282. [Google Scholar] [CrossRef]
- Salinas, C.T.; Pu, Y.; Lou, C.; dos Santos, D.B. Experiments for combustion temperature measurements in a sugarcane bagasse large-scale boiler furnace. App. Therm. Eng. 2020, 175, 115433. [Google Scholar] [CrossRef]
- Xiao, X.D.; Choi, C.W.; Puri, I.K. Temperature measurements in steady two-dimensional partially premixed flames using laser interferometric holography. Combust. Flame 2000, 120, 318–332. [Google Scholar] [CrossRef]
- Doi, J.; Sato, S. Three-dimensional modeling of the instantaneous temperature distribution in a turbulent flame using a multidirectional interferometer. Opt. Eng. 2007, 46, 015601. [Google Scholar]
- Wang, D.Z.; Zhuang, T.G. The measurement of 3-D asymmetric temperature field by using real time laser interferometric tomography. Opt. Lasers Eng. 2001, 36, 289–297. [Google Scholar] [CrossRef]
- Chen, H.; Du, Y.; Ding, Y.; Peng, Z. Non-uniform temperature measurement of flat flames using TDLAS. In Fourth Seminar on Novel Optoelectronic Detection Technology and Application; Guofan, J., Guangjun, Z., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10697. [Google Scholar]
- Cui, H.; Wang, F.; Huang, Q.; Yan, J.; Cen, K. Multiparameter Measurement in Ethylene Diffusion Flame Based on Time-Division Multiplexed Tunable Diode Laser Absorption Spectroscopy. IEEE Photonics J. 2019, 11, 1–12. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, W.; Kamimoto, T.; Deguchi, Y.; Yan, J.; Yao, S.; Girase, K.; Jeon, M.-G.; Kidoguchi, Y.; Nada, Y. Two-Dimensional Temperature Measurement in a High-Temperature and High-Pressure Combustor Using Computed Tomography Tunable Diode Laser Absorption Spectroscopy (CT-TDLAS) with a Wide-Scanning Laser at 1335–1375 nm. App. Spectrosc. 2020, 74, 210–222. [Google Scholar] [CrossRef]
- Most, D.; Leipertz, A. Simultaneous two-dimensional flow velocity and gas temperature measurements by use of a combined particle image velocimetry and filtered Rayleigh scattering technique. Appl. Opt. 2001, 40, 5379–5387. [Google Scholar] [CrossRef] [PubMed]
- Hoffman, D.; Munch, K.U.; Leipertz, A. Two-dimensional temperature determination in sooting flames by filtered Rayleigh scattering. Opt. Lett. 1996, 21, 525–527. [Google Scholar] [CrossRef] [PubMed]
- Feng, D.; Goldberg, B.M.; Shneider, M.N.; Miles, R.B. Optimization of Filtered Rayleigh Scattering for the Measurement of Pressure and Temperature. Combust. Sci. Technol. 2020, 1–19. [Google Scholar] [CrossRef]
- Bookey, H.T.; Bishop, A.I.; Barker, P.F. Narrow-band coherent Rayleigh scattering in a flame. Opt. Express 2006, 14, 3461–3466. [Google Scholar] [CrossRef]
- Kampmann, S.; Leipertz, A.; Dobbeling, K.; Haumann, J.; Sattelmayer, T. Two-dimensional temperature measurements in a technical combustor with laser Rayleigh scattering. Appl. Opt. 1993, 32, 6167–6172. [Google Scholar] [CrossRef]
- Ma, L.; Li, X.; Sanders, S.T.; Caswell, A.W.; Roy, S.; Plemmons, D.H.; Gord, J.R. 50-kHz-rate 2D imaging of temperature and H2O concentration at the exhaust plane of a J85 engine using hyperspectral tomography. Opt. Express 2013, 21, 1152–1162. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Cao, Z.; Lin, Y.; Xu, L.; McCann, H. Online Cross-Sectional Monitoring of a Swirling Flame Using TDLAS Tomography. IEEE Trans. Instrum. Meas. 2018, 67, 1338–1348. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.D.; Hao, X.J.; Xue, B.; Tai, B.; Zhou, H.C. Two-Dimensional Flame Temperature and Emissivity Distribution Measurement Based on Element Doping and Energy Spectrum Analysis. IEEE Access 2020, 8, 200863–200874. [Google Scholar] [CrossRef]
- Zapka, W.; Pokrowsky, P.; Tam, A.C. Noncontact optoacoustic monitoring of flame temperature profiles. Opt. Lett. 1982, 7, 477–479. [Google Scholar] [CrossRef]
- Liu, D.; Yan, J.H.; Wang, F.; Huang, Q.X.; Chi, Y.; Cen, K.F. Simultaneous experimental reconstruction of three-dimensional flame soot temperature and volume fraction distributions. Acta Phys. Sin. 2011, 60, 6. [Google Scholar]
- Liu, G.N.; Liu, D. Inverse radiation analysis for simultaneous reconstruction of temperature and volume fraction fields of soot and metal-oxide nanoparticles in a nanofluid fuel sooting flame. Int. J. Heat Mass Transf. 2018, 118, 1080–1089. [Google Scholar] [CrossRef]
- Liu, D.; Huang, Q.X.; Wang, F.; Chi, Y.; Cen, K.F.; Yan, J.H. Simultaneous Measurement of Three-Dimensional Soot Temperature and Volume Fraction Fields in Axisymmetric or Asymmetric Small Unconfined Flames With CCD Cameras. J. Heat Transf. Trans. ASME 2010, 132, 061202. [Google Scholar] [CrossRef]
- Jiang, F.; Liu, S.; Liangi, S.Q.; Li, Z.H.; Wang, X.Y.; Lu, G. Visual Flame Monitoring System Based on Two-Color Method. J. Therm. Sci. 2009, 18, 284–288. [Google Scholar] [CrossRef]
- Li, Z.H.; Liu, S.; Mu, H.P.; Jiang, F.; Guo, J.M. Calibration and Experimental Research of a Multiple-wavelength Flame Temperature Instrumentation System. J. Therm. Sci. 2004, 13, 371–375. [Google Scholar] [CrossRef]
- Huang, Y.; Yan, Y. Transient two-dimensional temperature measurement of open flames by dual-spectral image analysis. Trans. Inst. Meas. Control. 2000, 22, 371–384. [Google Scholar] [CrossRef]
- Huang, Q.X.; Liu, D.; Wang, F.; Yan, J.H.; Chi, Y.; Cen, K.F. Study on three-dimensional flame temperature distribution reconstruction based on truncated singular value decomposition. Acta Phys. Sin. 2007, 56, 6742–6748. [Google Scholar] [CrossRef]
- Liu, D.; Wang, F.; Cen, K.F.; Yan, J.H.; Huang, Q.X.; Chi, Y. Noncontact temperature measurement by means of CCD cameras in a participating medium. Opt. Lett. 2008, 33, 422–424. [Google Scholar] [CrossRef]
- Liu, L.H.; Tan, H.P. Inverse radiation problem in three-dimensional complicated geometric systems with opaque boundaries. J. Quant. Spectrosc. Radiat. Transf. 2001, 68, 559–573. [Google Scholar] [CrossRef]
- Liu, D.; Wang, F.; Yan, J.H.; Huang, Q.X.; Chi, Y.; Cen, K.F. Inverse radiation problem of temperature field in three-dimensional rectangular enclosure containing inhomogeneous, anisotropically scattering media. Int. J. Heat Mass Trans. 2008, 51, 3434–3441. [Google Scholar] [CrossRef]
- Rukolaine, S.A. Regularization of inverse boundary design radiative heat transfer problems. J. Quant. Spectrosc. Radiat. Transf. 2007, 104, 171–195. [Google Scholar] [CrossRef]
- Daun, K.J.; Howell, J.R. Inverse design methods for radiative transfer systems. J. Quant. Spectrosc. Radiat. Transf. 2005, 93, 43–60. [Google Scholar] [CrossRef]
- Qiu, S.R.; Lou, C.; Xu, D.D. A hybrid method for reconstructing temperature distributions in a radiant enclosure. Numer. Heat Transf. Part A Appl. 2014, 66, 1097–1111. [Google Scholar] [CrossRef]
- Zhou, H.-C.; Han, S.-D.; Sheng, F.; Zheng, C.-G. Visualization of three-dimensional temperature distributions in a large-scale furnace via regularized reconstruction from radiative energy images: Numerical studies. J. Quant. Spectrosc. Radiat. Transf. 2002, 72, 361–383. [Google Scholar] [CrossRef]
- Lou, C.; Zhou, H.-C. Assessment of regularized reconstruction of three-dimensional temperature distributions in large-scale furnaces. Numer. Heat Tranfer. B-Fundam. 2008, 53, 555–567. [Google Scholar] [CrossRef]
- Daun, K.J.; Thomson, K.A.; Liu, F.; Smallwood, G.J. Deconvolution of axisymmetric flame properties using Tikhonov regularization. Appl. Optics 2006, 45, 4638–4646. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.-C.; Lou, C.; Cheng, Q.; Jiang, Z.; He, J.; Huang, B.; Pei, Z.; Lu, C. Experimental investigations on visualization of three-dimensional temperature distributions in a large-scale pulverized-coal-fired boiler furnace. Proc. Combust. Inst. 2004, 30, 1699–1706. [Google Scholar] [CrossRef]
- Wei, C.; Schwarm, K.K.; Pineda, D.I.; Spearrin, R.M. Volumetric laser absorption imaging of temperature, CO and CO2 in laminar flames using 3D masked Tikhonov regularization. Combust. Flame 2021, 224, 239–247. [Google Scholar] [CrossRef]
- Xie, Z.C.; Wang, F.; Yan, J.H.; Cen, K.F. Comparative studies of Tikhonov regularization and truncated singular value decomposition in the three-dimensional flame temperature field reconstruction. Acta Phys. Sin. 2015, 64, 24. [Google Scholar]
- Huang, Q.X.; Wang, F.; Liu, D.; Ma, Z.Y.; Yan, J.H.; Chi, Y.; Cen, K.F. Reconstruction of soot temperature and volume fraction profiles of an asymmetric flame using stereoscopic tomography. Combust. Flame 2009, 156, 565–573. [Google Scholar] [CrossRef]
- Wang, F.; Yan, J.H.; Cen, K.F.; Huang, Q.X.; Liu, D.; Chi, Y.; Ni, M.J. Simultaneous measurements of two-dimensional temperature and particle concentration distribution from the image of the pulverized-coal flame. Fuel 2010, 89, 202–211. [Google Scholar] [CrossRef]
- Lou, C.; Zhou, H.-C. Decoupled reconstruction method for simultaneous estimation of temperatures and radiative properties in a one-dimensional, gray, participating medium. Numer Heat Tranf. B-Fundam. 2007, 51, 275–292. [Google Scholar] [CrossRef]
- Lou, C.; Zhou, H.-C.; Yu, P.-F.; Jiang, Z.-W. Measurements of the flame emissivity and radiative properties of particulate medium in pulverized-coal-fired boiler furnaces by image processing of visible radiation. Proc. Combust. Inst. 2007, 31, 2771–2778. [Google Scholar] [CrossRef]
- Lou, C.; Li, W.H.; Zhou, H.C.; Salinas, C.T. Experimental investigation on simultaneous measurement of temperature distributions and radiative properties in an oil-fired tunnel furnace by radiation analysis. Int. J. Heat Mass Transf. 2011, 54, 1–8. [Google Scholar] [CrossRef]
- Yan, W.J.; Lou, C. Two-dimensional distributions of temperature and soot volume fraction inversed from visible flame images. Exp. Therm. Fluid Sci. 2013, 50, 229–233. [Google Scholar] [CrossRef]
- Ufuah, E.; Bailey, C.G. Flame Radiation Characteristics of Open Hydrocarbon Pool Fires. In Proceedings of the World Congress on Engineering 2011, WCE 2011, London, UK, 6–8 July 2011; Volume 3, pp. 1952–1958. [Google Scholar]
- Liu, G.N.; Liu, D. Direct simultaneous reconstruction for temperature and concentration profiles of soot and metal-oxide nanoparticles in nanofluid fuel flames by a CCD camera. Int. J. Heat Mass Transf. 2018, 124, 564–575. [Google Scholar] [CrossRef]
- Sun, Y.-P.; Lou, C.; Zhou, H.-C. Estimating soot volume fraction and temperature in flames using stochastic particle swarm optimization algorithm. Int. J. Heat Mass Transf. 2011, 54, 217–224. [Google Scholar] [CrossRef]
- Ayrancı, I.; Vaillon, R.; Selçuk, N.; André, F.; Escudié, D. Determination of soot temperature, volume fraction and refractive index from flame emission spectrometry. J. Quant. Spectrosc. Radiat. Transf. 2007, 104, 266–276. [Google Scholar] [CrossRef]
- Charalampopoulos, T.; Chang, H. In Situ Optical Properties of Soot Particles in the Wavelength Range from 340 nm to 600 nm. Combust. Sci. Technol. 1988, 59, 401–421. [Google Scholar] [CrossRef]
- Xiangyu, Z.; Shu, Z.; Huaichun, Z.; Bo, Z.; Huajian, W.; Hongjie, X. Simultaneously reconstruction of inhomogeneous temperature and radiative properties by radiation image processing. Int. J. Therm. Sci. 2016, 107, 121–130. [Google Scholar] [CrossRef]
- Toro, N.C.; Arias, P.L.; Torres, S.; Sbarbaro, D. Flame spectra-temperature estimation based on a color imaging camera and a spectral reconstruction technique. Appl. Optics 2014, 53, 6351–6361. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, W.; Hu, Z.; Li, K.; Xing, X.; Gong, H.; Yu, B.; Zhou, H. Numerical Simultaneous Determination of Non-Uniform Soot Temperature and Volume Fraction from Visible Flame Images. Energies 2022, 15, 2770. https://doi.org/10.3390/en15082770
Yan W, Hu Z, Li K, Xing X, Gong H, Yu B, Zhou H. Numerical Simultaneous Determination of Non-Uniform Soot Temperature and Volume Fraction from Visible Flame Images. Energies. 2022; 15(8):2770. https://doi.org/10.3390/en15082770
Chicago/Turabian StyleYan, Weijie, Zhichao Hu, Kuangyu Li, Xiaoyu Xing, Huifang Gong, Bo Yu, and Huaichun Zhou. 2022. "Numerical Simultaneous Determination of Non-Uniform Soot Temperature and Volume Fraction from Visible Flame Images" Energies 15, no. 8: 2770. https://doi.org/10.3390/en15082770
APA StyleYan, W., Hu, Z., Li, K., Xing, X., Gong, H., Yu, B., & Zhou, H. (2022). Numerical Simultaneous Determination of Non-Uniform Soot Temperature and Volume Fraction from Visible Flame Images. Energies, 15(8), 2770. https://doi.org/10.3390/en15082770