

An Improved Model−Free Current Predictive Control of Permanent Magnet Synchronous Motor Based on High−Gain Disturbance Observer

Abstract
:1. Introduction
2. Conventional Model−Free Predictive Current Control
2.1. Mathematical Model of PMSM Considering Disturbance Factors
2.2. Construction of Classical Ultra−Local Model for PMSM
2.3. Conventional Model−Free Predictive Current Control
3. Improved Model−Free Predictive Control of PMSM Based on High−Gain Disturbance Observer
3.1. Ultra−Local Model Optimization
3.2. Improved Model−Free Predictive Current Control
3.3. Design of High−Gain Disturbance Observer
4. Simulation and Experimental Verification
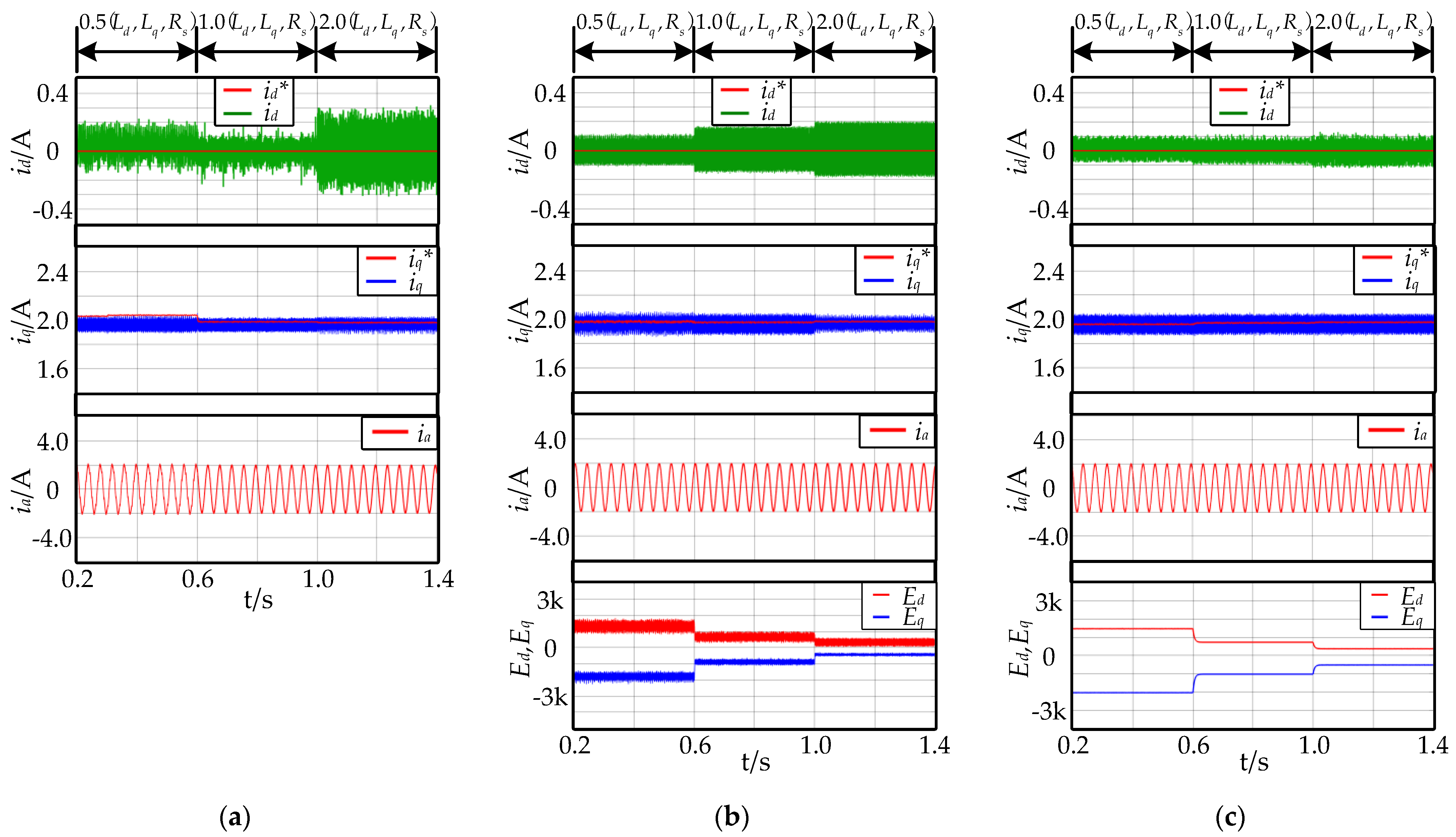
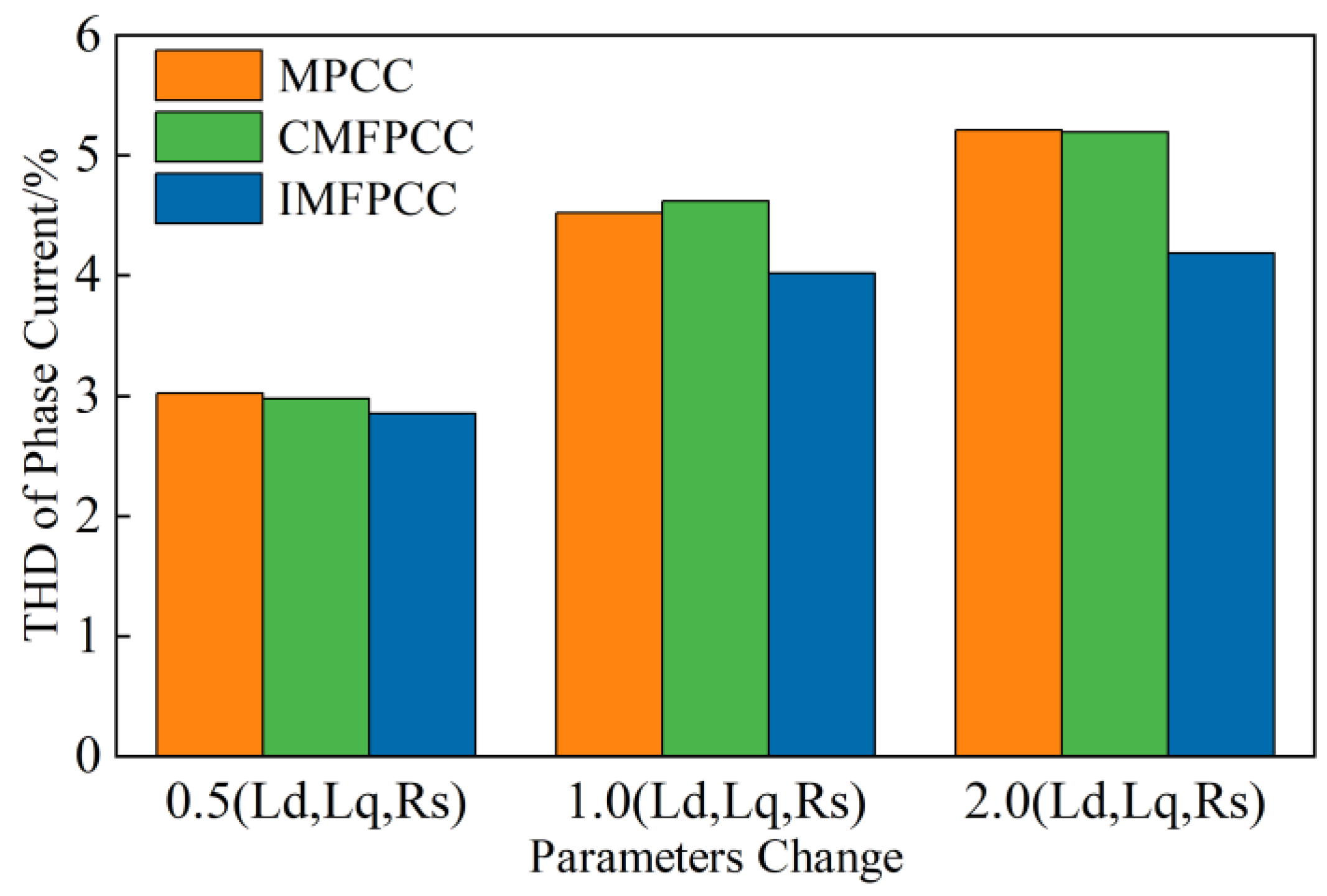
4.1. Simulation Analysis
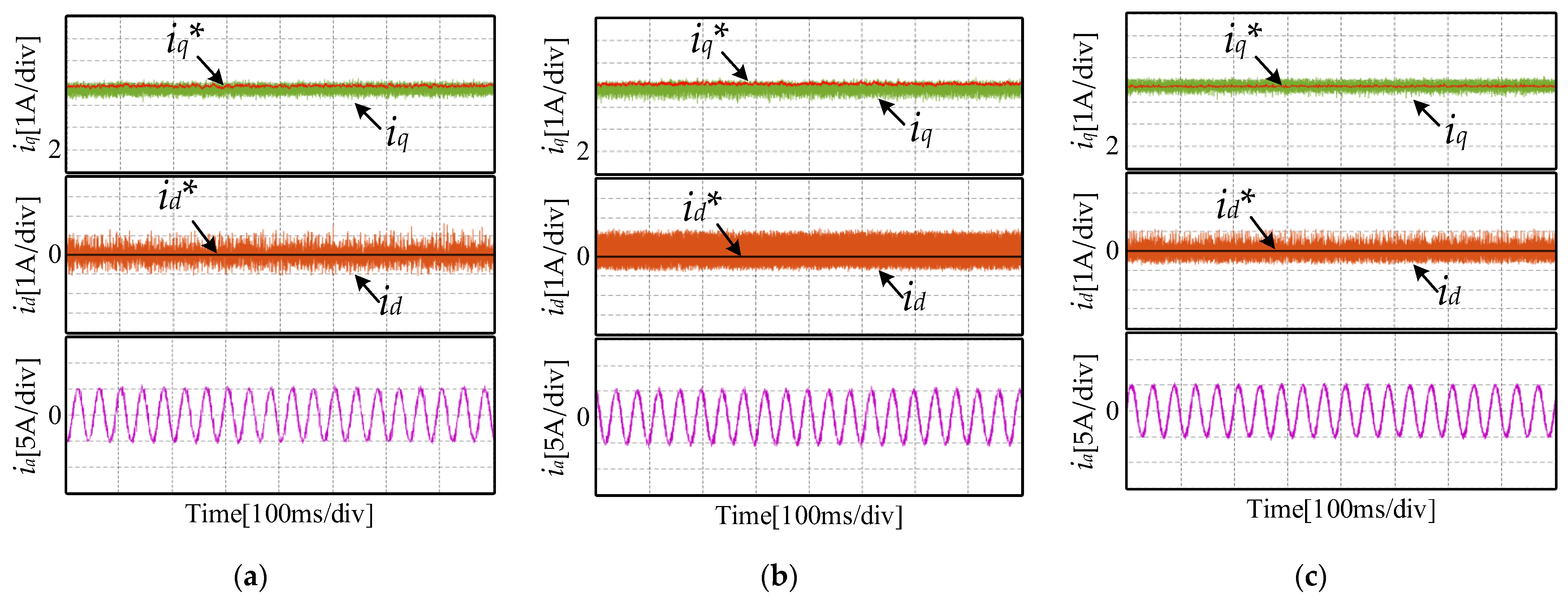
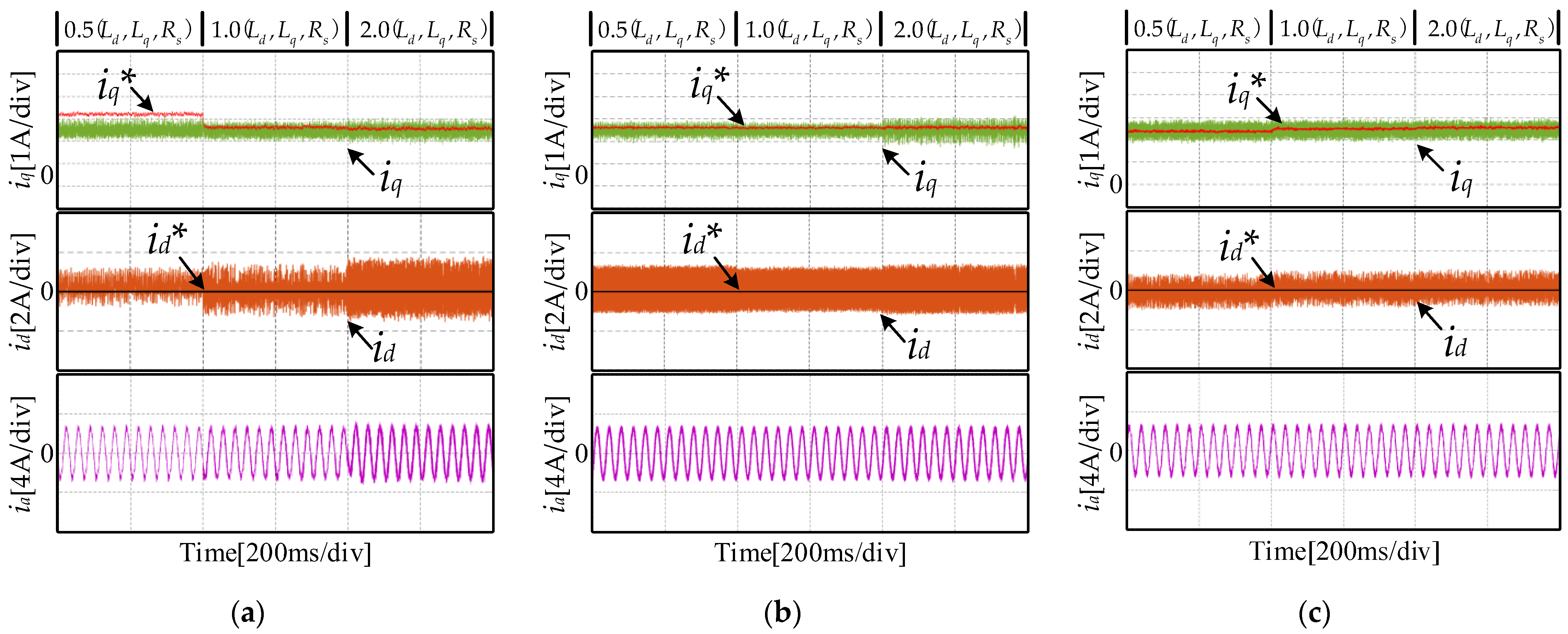
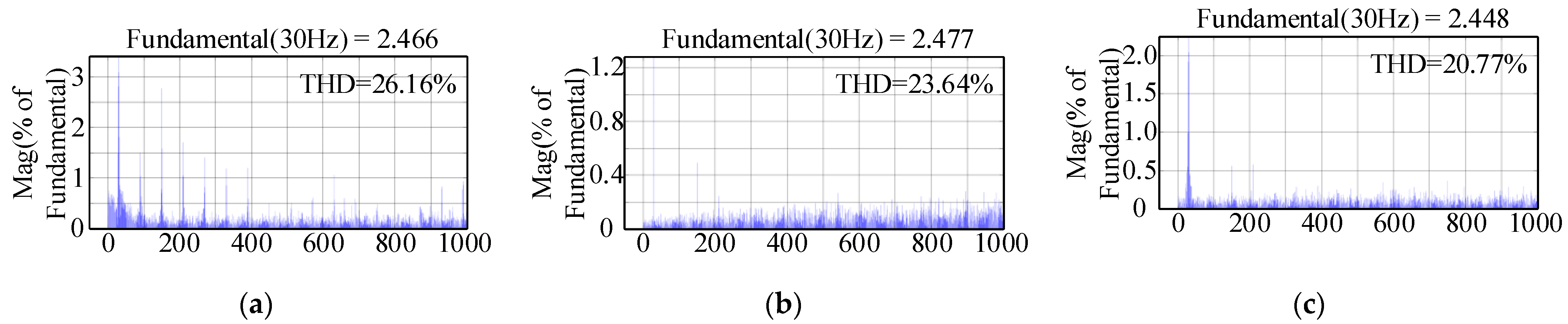
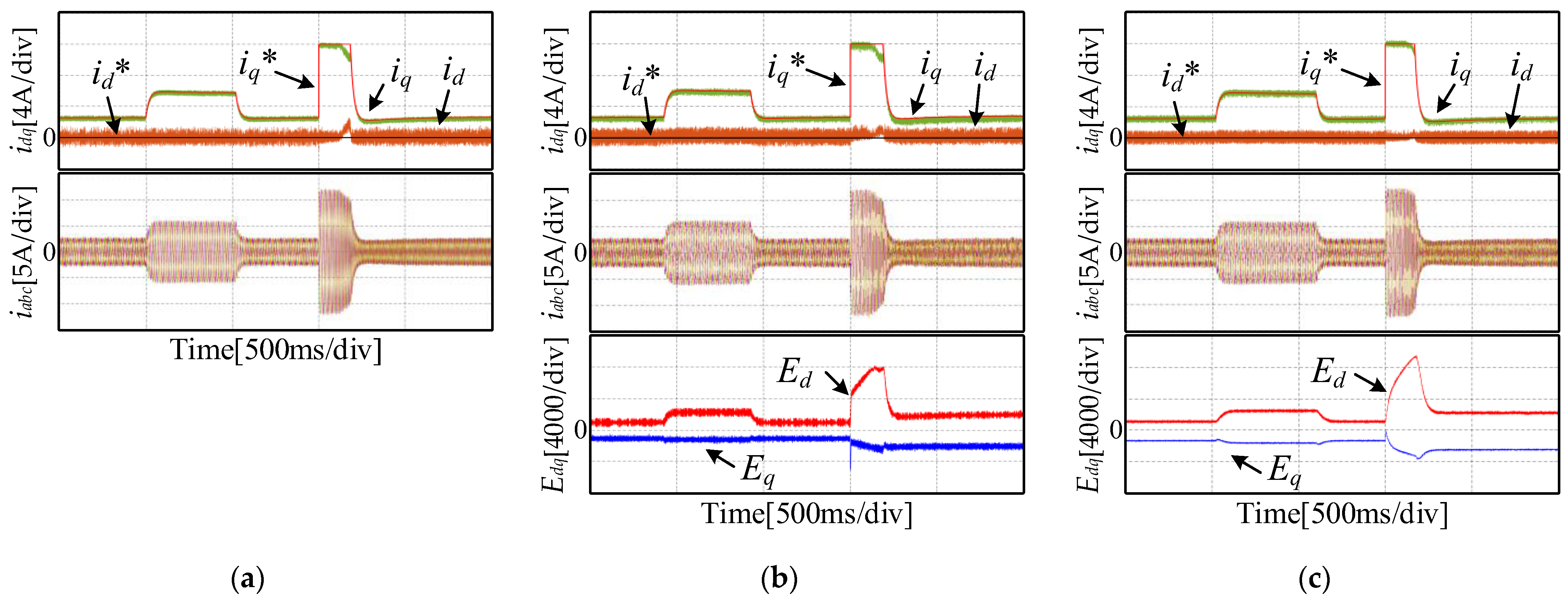
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ilioudis, V.C. Sensorless Control of Permanent Magnet Synchronous Machine with Magnetic Saliency Tracking Based on Voltage Signal Injection. Machines 2020, 8, 14. [Google Scholar] [CrossRef] [Green Version]
- Casadei, D.; Profumo, F.; Serra, G.; Tani, A. FOC and DTC: Two Viable Schemes for Induction Motors Torque Control. IEEE Trans. Power Electron. 2002, 17, 779–787. [Google Scholar] [CrossRef] [Green Version]
- Xiong, C.; Xu, H.; Guan, T.; Zhou, P. A Constant Switching Frequency Multiple−Vector−Based Model Predictive Current Control of Five−Phase PMSM With Non−sinusoidal Back EMF. IEEE Trans. Ind. Electron. 2020, 67, 1695–1707. [Google Scholar] [CrossRef]
- Agoro, S.; Husain, I. Robust Deadbeat Finite−Set Predictive Current Control with Torque Oscillation and Noise Reduction for PMSM Drives. IEEE Trans. Ind. Appl. 2022, 58, 365–374. [Google Scholar] [CrossRef]
- Zhao, L.; Chen, Z.; Wang, H.; Li, L.; Mao, X.; Li, Z.; Zhang, J.; Wu, D. An Improved Deadbeat Current Controller of PMSM Based on Bilinear Discretization. Machines 2022, 10, 79. [Google Scholar] [CrossRef]
- Gong, C.; Hu, Y.; Ma, M.; Yan, L.; Liu, J.; Wen, H. Accurate FCS Model Predictive Current Control Technique for Surface−Mounted PMSMs at Low Control Frequency. IEEE Trans. Power Electron. 2020, 35, 5567–5572. [Google Scholar] [CrossRef]
- Körpe, U.U.; Gökdağ, M.; Koç, M.; Gülbudak, O. Modulated Model Predictive Torque Control for Interior Permanent Magnet Synchronous Machines. El−Cezeri 2022, 9, 777–787. [Google Scholar] [CrossRef]
- Gulbudak, O.; Gokdag, M.; Komurcugil, H. Model Predictive Control Strategy for Induction Motor Drive Using Lyapunov Stability Objective. IEEE Trans. Ind. Electron. 2022, 69, 12119–12128. [Google Scholar] [CrossRef]
- Turker, T.; Buyukkeles, U.; Bakan, A.F. A Robust Predictive Current Controller for PMSM Drives. IEEE Trans. Ind. Electron. 2016, 63, 3906–3914. [Google Scholar] [CrossRef]
- Li, J.; Huang, X.; Niu, F.; You, C.; Wu, L.; Fang, Y. Prediction Error Analysis of Finite−Control−Set Model Predictive Current Control for IPMSMs. Energies 2018, 11, 2051. [Google Scholar] [CrossRef]
- Wang, F.; Zuo, K.; Tao, P.; Rodriguez, J. High Performance Model Predictive Control for PMSM by Using Stator Current Mathematical Model Self−Regulation Technique. IEEE Trans. Power Electron. 2020, 35, 13652–13662. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Mei, Y. Deadbeat Predictive Current Control of Permanent−Magnet Synchronous Motors with Stator Current and Disturbance Observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Virtual−Vector−Based Robust Predictive Current Control for Dual Three−Phase PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2048–2058. [Google Scholar] [CrossRef]
- Lin, C.-K.; Liu, T.-H.; Yu, J.; Fu, L.-C.; Hsiao, C.-F. Model−Free Predictive Current Control for Interior Permanent−Magnet Synchronous Motor Drives Based on Current Difference Detection Technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Da Ru, D.; Polato, M.; Bolognani, S. Model−Free Predictive Current Control for a SynRM Drive Based on an Effective Update of Measured Current Responses. In Proceedings of the 2017 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Pilsen, Czech Republic, 4–6 September 2017; pp. 119–124. [Google Scholar]
- Ma, C.; Li, H.; Yao, X.; Zhang, Z.; De Belie, F. An Improved Model−Free Predictive Current Control with Advanced Current Gradient Updating Mechanism. IEEE Trans. Ind. Electron. 2021, 68, 11968–11979. [Google Scholar] [CrossRef]
- Ma, C.; Rodriguez, J.; Garcia, C.; De Belie, F. Integration of Reference Current Slope Based Model−Free Predictive Control in Modulated PMSM Drives. IEEE J. Emerg. Sel. Topics Power Electron. 2022. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model−Free Control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Li, H.; Yao, H. Model−Free Control of Surface Mounted PMSM Drive System. In Proceedings of the 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016; pp. 175–180. [Google Scholar]
- Zhou, Y.; Li, H.; Zhang, H. Model−Free Deadbeat Predictive Current Control of a Surface−Mounted Permanent Magnet Synchronous Motor Drive System. J. Power Electron. 2018, 18, 103–115. [Google Scholar]
- Zhou, Y.; Li, H.; Zhang, H.; Mao, J.; Huang, J. Model Free Deadbeat Predictive Speed Control of Surface−Mounted Permanent Magnet Synchronous Motor Drive System. J. Electr. Eng. Technol. 2019, 14, 265–274. [Google Scholar] [CrossRef]
- Xu, L.; Chen, G.; Li, Q. Cascaded Speed and Current Model of PMSM with Ultra-local Model-free Predictive Control. IET Electric Power Appl. 2021, 15, 1424–1437. [Google Scholar] [CrossRef]
- Xu, L.; Chen, G.; Li, Q. Ultra−Local Model−Free Predictive Current Control Based on Nonlinear Disturbance Compensation for Permanent Magnet Synchronous Motor. IEEE Access 2020, 8, 127690–127699. [Google Scholar] [CrossRef]
- Zerdali, E.; Wheeler, P. Model−Free Simplified Predictive Current Control of PMSM Drive with Ultra−Local Model−Based EKF. In Proceedings of the 2021 3rd Global Power, Energy and Communication Conference (GPECOM), Antalya, Turkey, 5–8 October 2021; pp. 62–66. [Google Scholar]
- Cao, R.; Jiang, N.; Lu, M. Sensorless Control of Linear Flux−Switching Permanent Magnet Motor Based on Extended Kalman Filter. IEEE Trans. Ind. Electron. 2020, 67, 5971–5979. [Google Scholar] [CrossRef]
- Zhao, K.; Yin, T.; Zhang, C.; He, J.; Li, X.; Chen, Y.; Zhou, R.; Leng, A. Robust Model−Free Nonsingular Terminal Sliding Mode Control for PMSM Demagnetization Fault. IEEE Access 2019, 7, 15737–15748. [Google Scholar] [CrossRef]
- Wang, Y.; Lan, Z.; Zhu, G. Adaptive Sliding Mode Observer Based on Phase Locked Loop in Sensorless Control of Permanent Magnet Linear Synchronous Motor. In Proceedings of the 2021 13th International Symposium on Linear Drives for Industry Applications (LDIA), Wuhan, China, 1–3 July 2021; pp. 1–6. [Google Scholar]
- Liu, H.; Sun, J.; Nie, J.; Chen, G.; Zou, L. Adaptive Non−Singular Terminal Sliding Mode Control with High−Gain Observers for Robotic Manipulators. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3547–3552. [Google Scholar]
- Zhou, Y.; Soh, Y.C.; Shen, J.X. High−Gain Observer with Higher Order Sliding Mode for State and Unknown Disturbance Estimations: High−Gain Observer with High Order Sliding Mode. Int. J. Robust. Nonlinear Control 2014, 24, 2136–2151. [Google Scholar] [CrossRef]
- Wang, L.J.; Zhao, J.W.; Dong, F.; He, Z.Y.; Song, J.C.; Li, M. High−bandwidth and Strong Robust Predictive Current Control Strategy Research for Permanent Magnet Synchronous Linear Motor Based on Adaptive Internal Model Observer. Proc. CSEE 2019, 39, 3098–3107. (In Chinese) [Google Scholar]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High−Gain Disturbance Observer−Based Backstepping Control with Output Tracking Error Constraint for Electro−Hydraulic Systems. IEEE Trans. Contr. Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model Predictive Current Control for PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Safaei, A.; Mahyuddin, M.N. Adaptive Model−Free Control Based on an Ultra−Local Model with Model−Free Parameter Estimations for a Generic SISO System. IEEE Access 2018, 6, 4266–4275. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rated voltage | UN | 380 V |
| Rated speed | nN | 1000 rpm |
| Rated torque | TN | 9.6 N∙m |
| Stator resistance | Rs | 3.95 Ω |
| Induction of d−axis | Ld | 33.65 mH |
| Induction of q−axis | Lq | 79.56 mH |
| Pole pairs | p | 3 |
| Magnetic flux | ψf | 0.457 Wb |
| Control Algorithm | MPCC | CMFPCC | IMFPCC |
|---|---|---|---|
| Processing time of the controller/μs | 44 | 55 | 42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wu, Z.; Yan, Q.; Huang, N.; Du, G. An Improved Model−Free Current Predictive Control of Permanent Magnet Synchronous Motor Based on High−Gain Disturbance Observer. Energies 2023, 16, 141. https://doi.org/10.3390/en16010141
Zhang Y, Wu Z, Yan Q, Huang N, Du G. An Improved Model−Free Current Predictive Control of Permanent Magnet Synchronous Motor Based on High−Gain Disturbance Observer. Energies. 2023; 16(1):141. https://doi.org/10.3390/en16010141
Chicago/Turabian StyleZhang, Yufeng, Zihui Wu, Qi Yan, Nan Huang, and Guanghui Du. 2023. "An Improved Model−Free Current Predictive Control of Permanent Magnet Synchronous Motor Based on High−Gain Disturbance Observer" Energies 16, no. 1: 141. https://doi.org/10.3390/en16010141