
Solar, Wind and Their Hybridization Integration for Multi-Machine Power System Oscillation Controllers Optimization: A Review

 ,
, 
 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Review Methodology
3. Solar, Wind, and Their Hybridization Integration for Multi-Machine Power System Controllers Optimization
3.1. Renewable Energy Sources (RESs) and Integration with Multi-Machine Power System
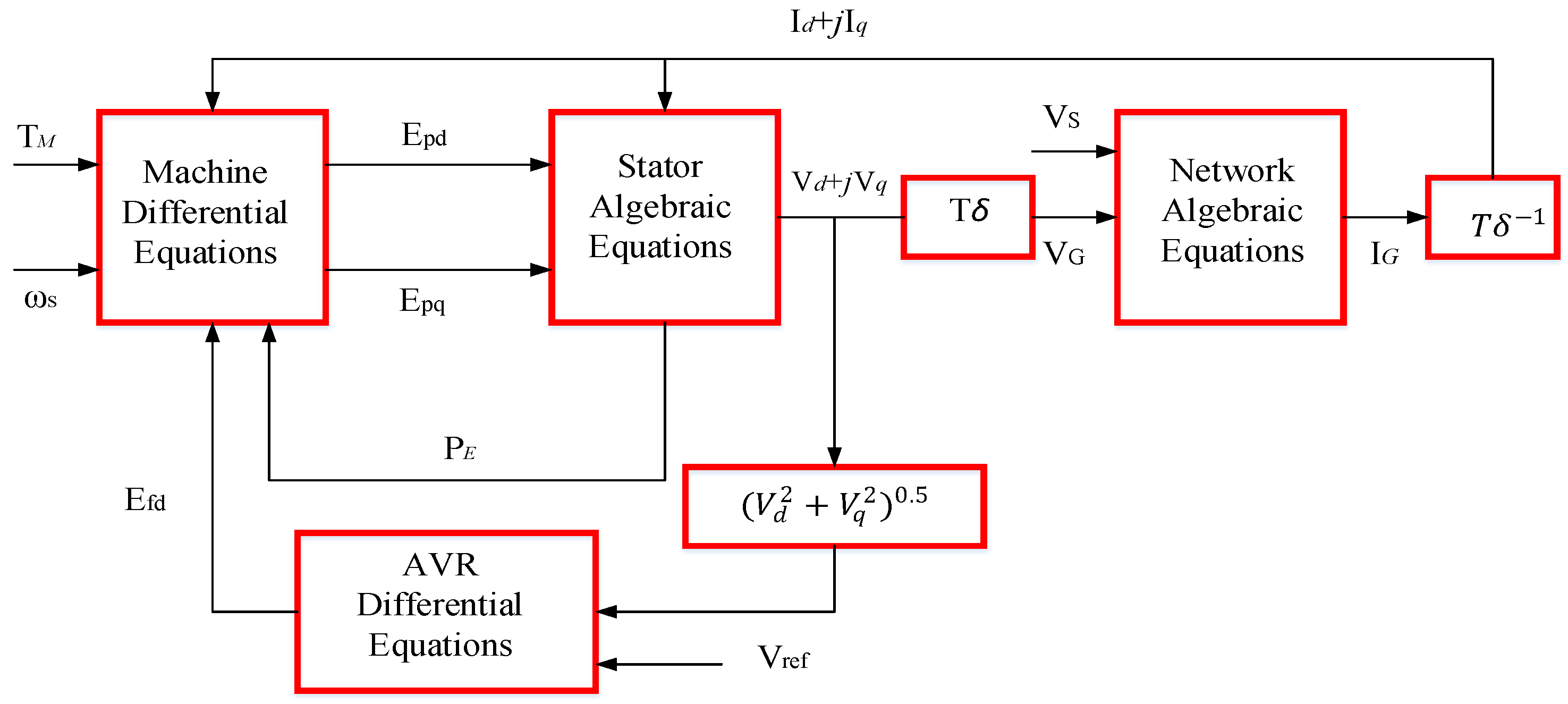
3.1.1. Synchronous Machine Modeling
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- ;
- = q-axis component of generator terminal voltage;
- ;
- ;
- ;
- ;
- .
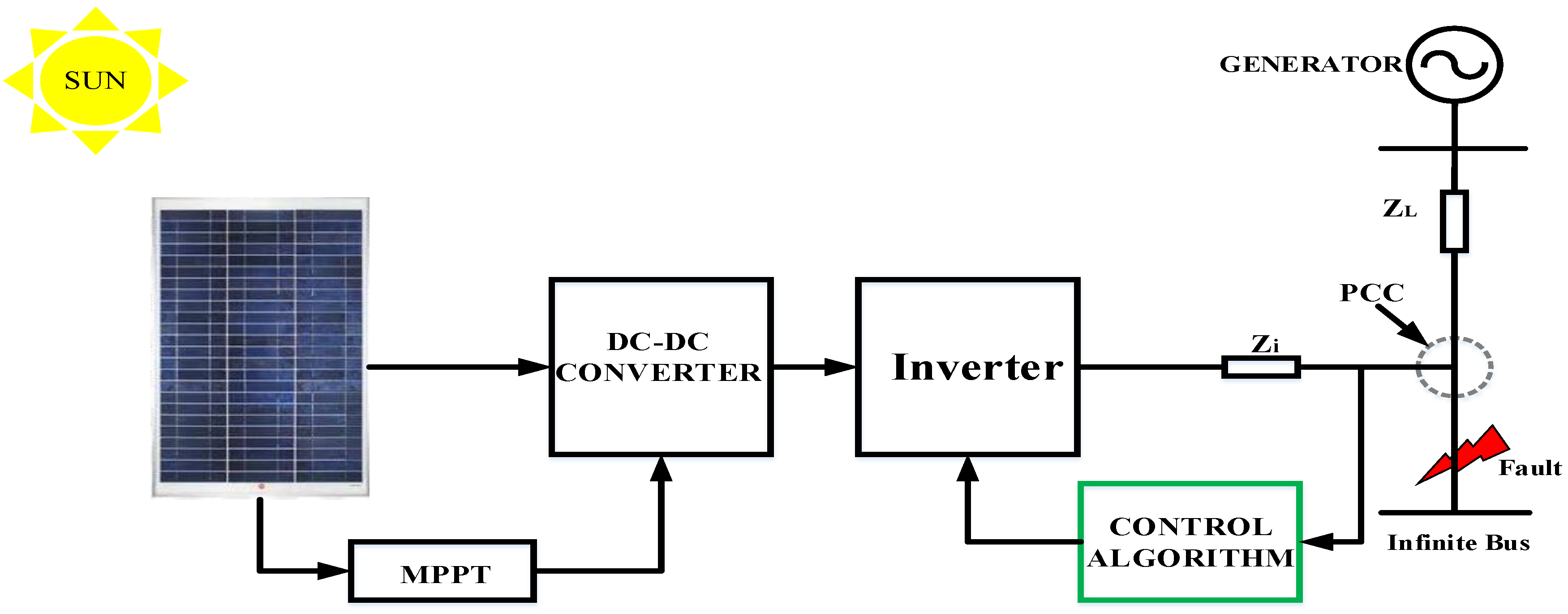
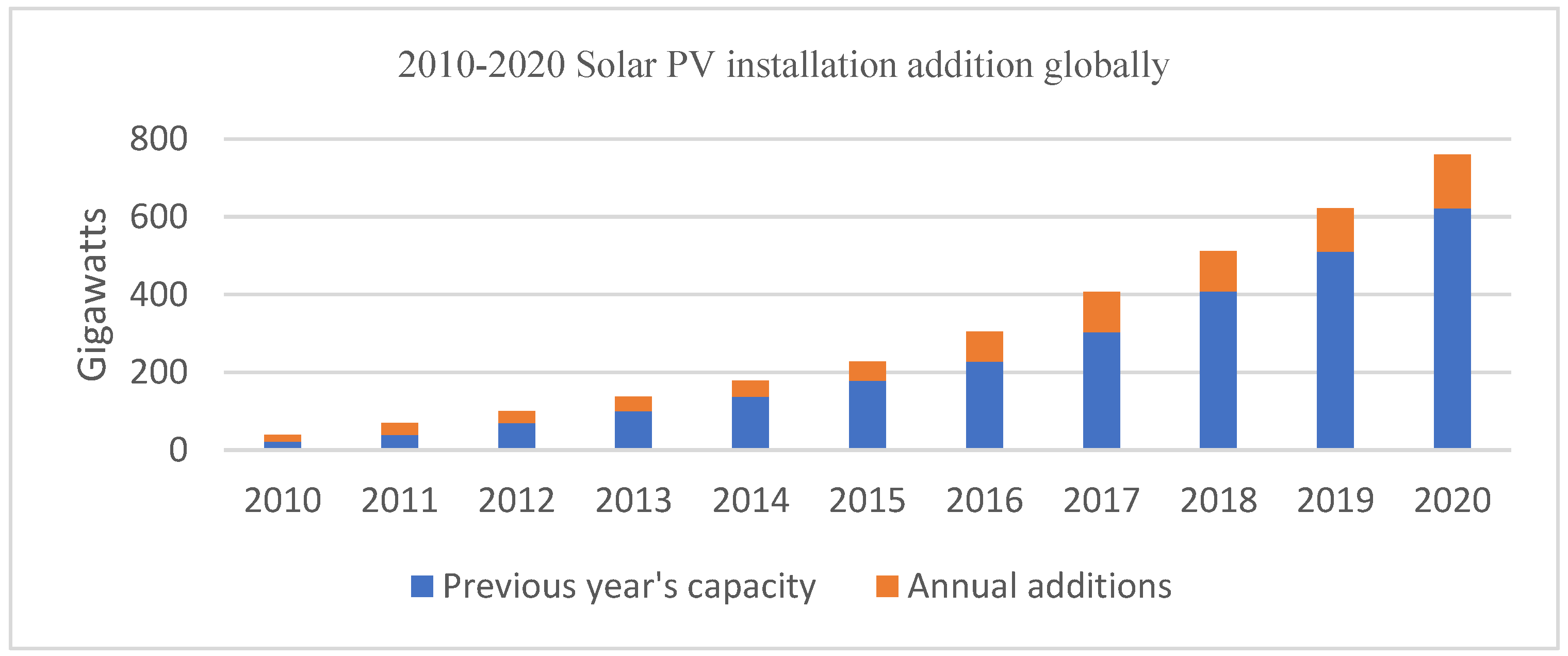
3.1.2. SOLAR
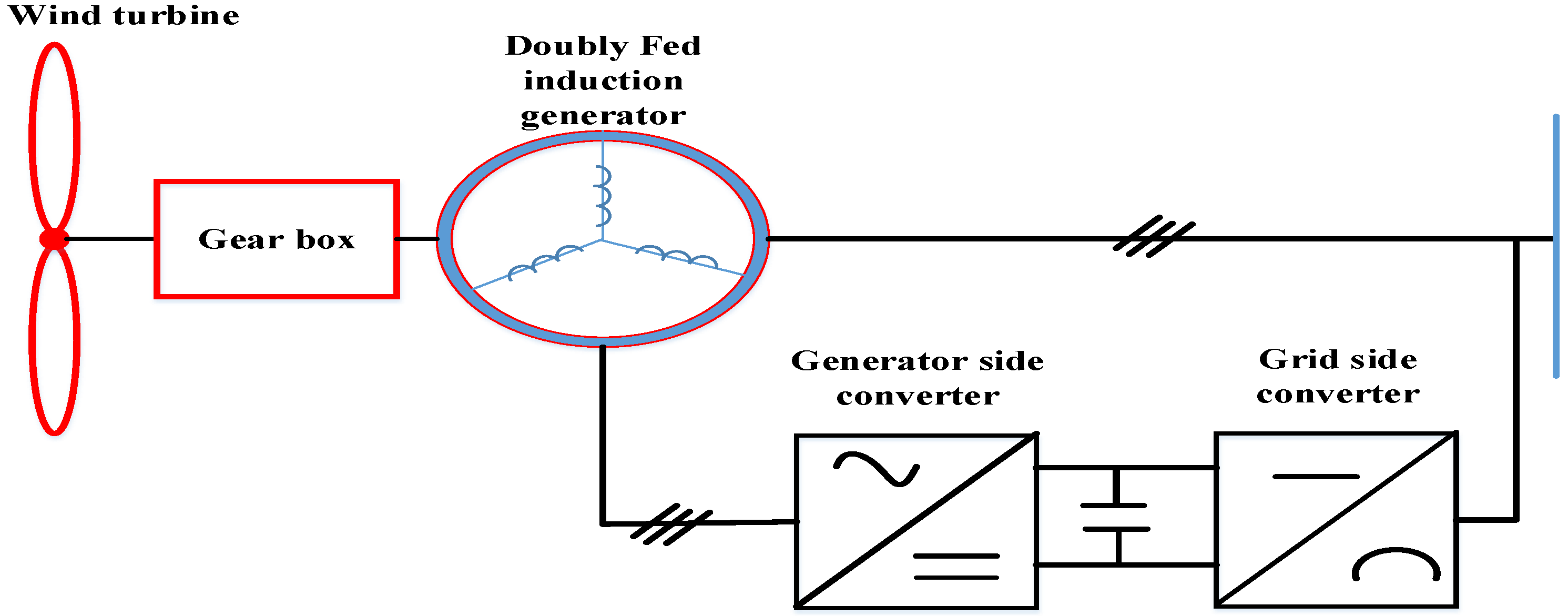
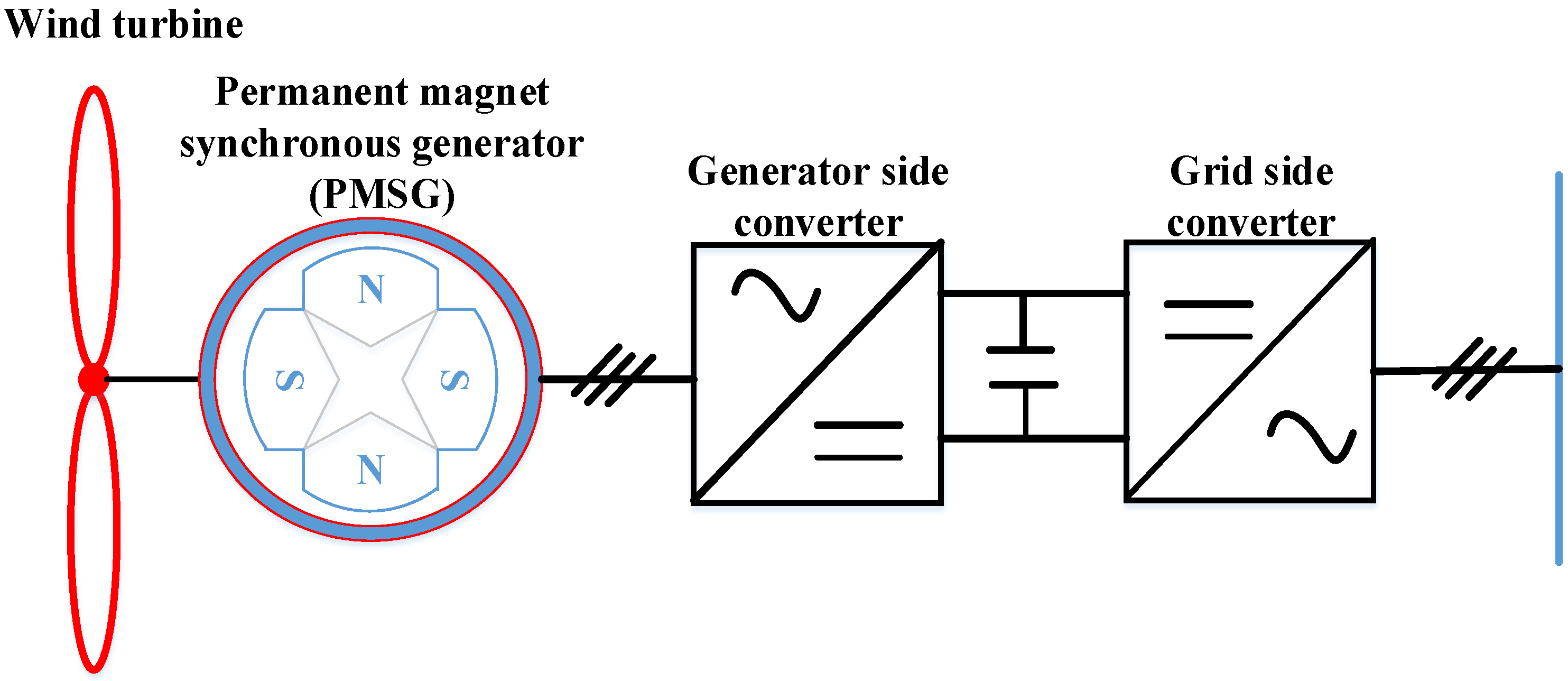
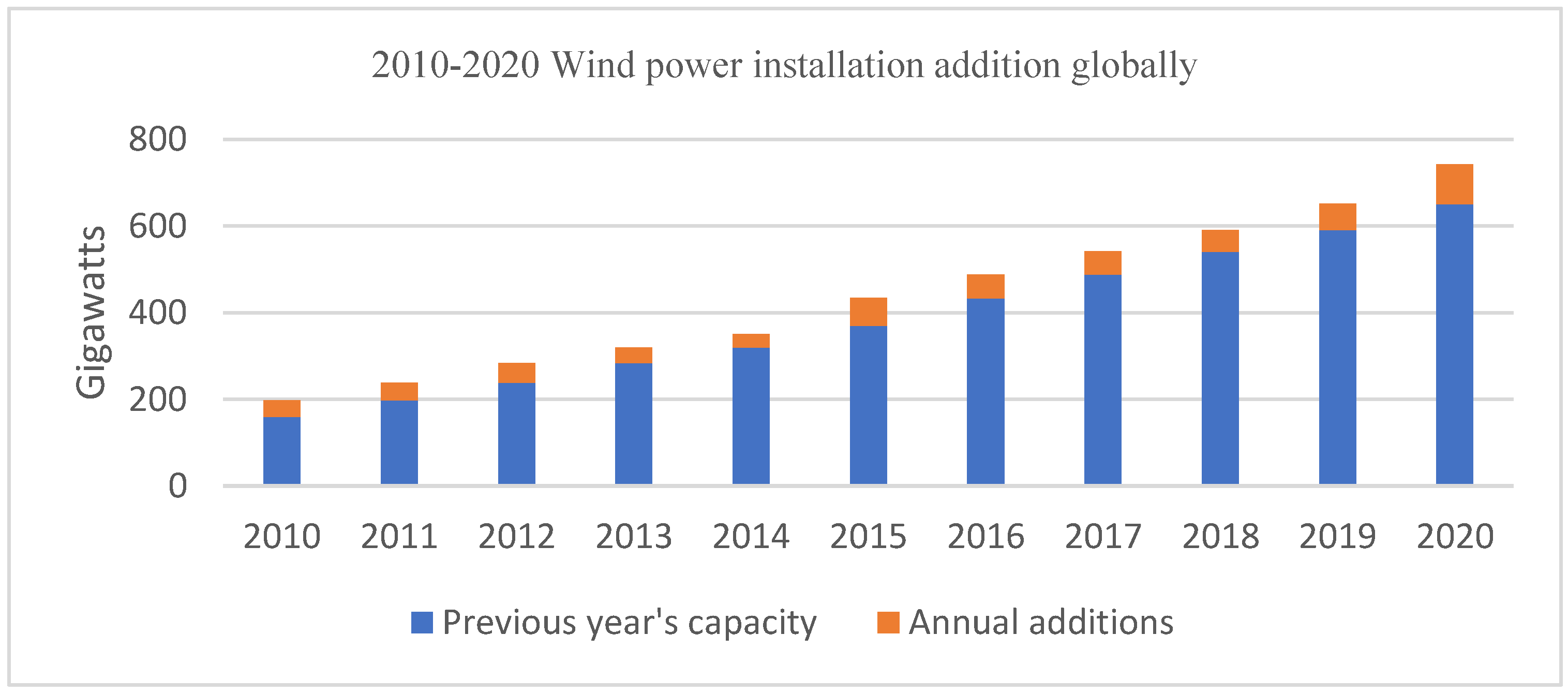
3.1.3. WIND
3.1.4. Hybrid
3.2. Wind–PV Maximum Power Tracking and Integration to the GRID
3.2.1. Maximum Power Point Tracking (MPPT)
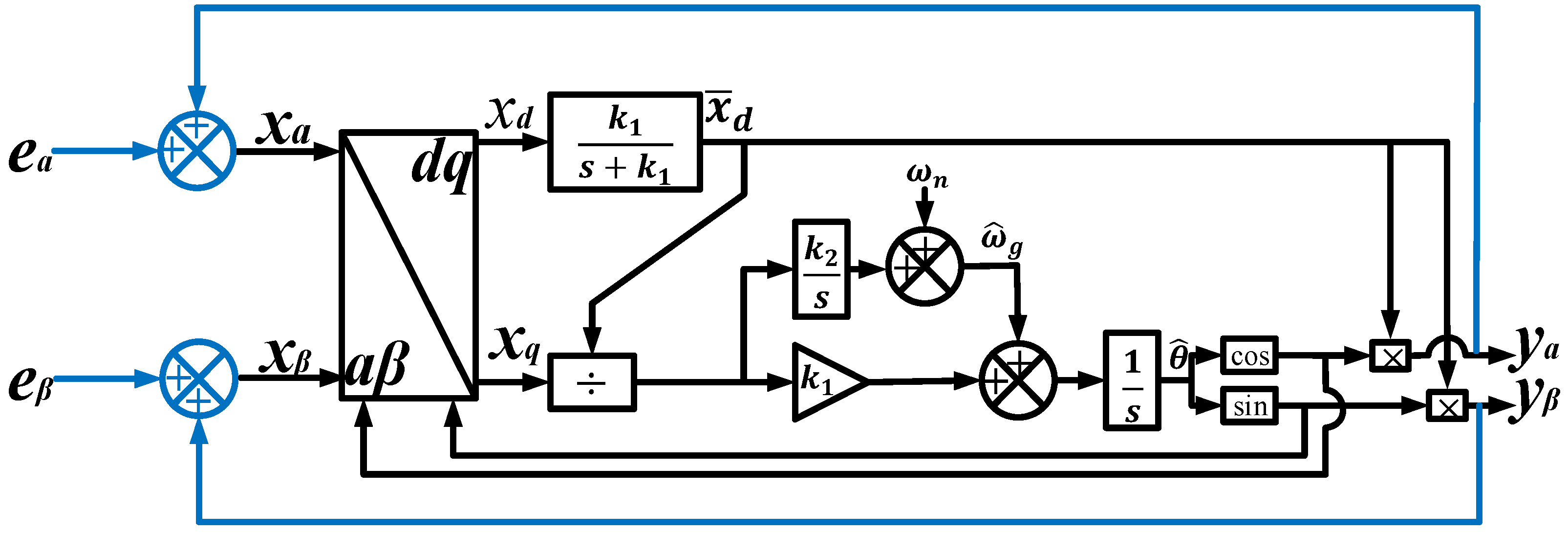
3.2.2. Phase-Lock Loop (PLL)
3.2.3. Converters
3.3. Power System Stability and Oscillations
3.4. Stability Analysis of Different Damping Schemes
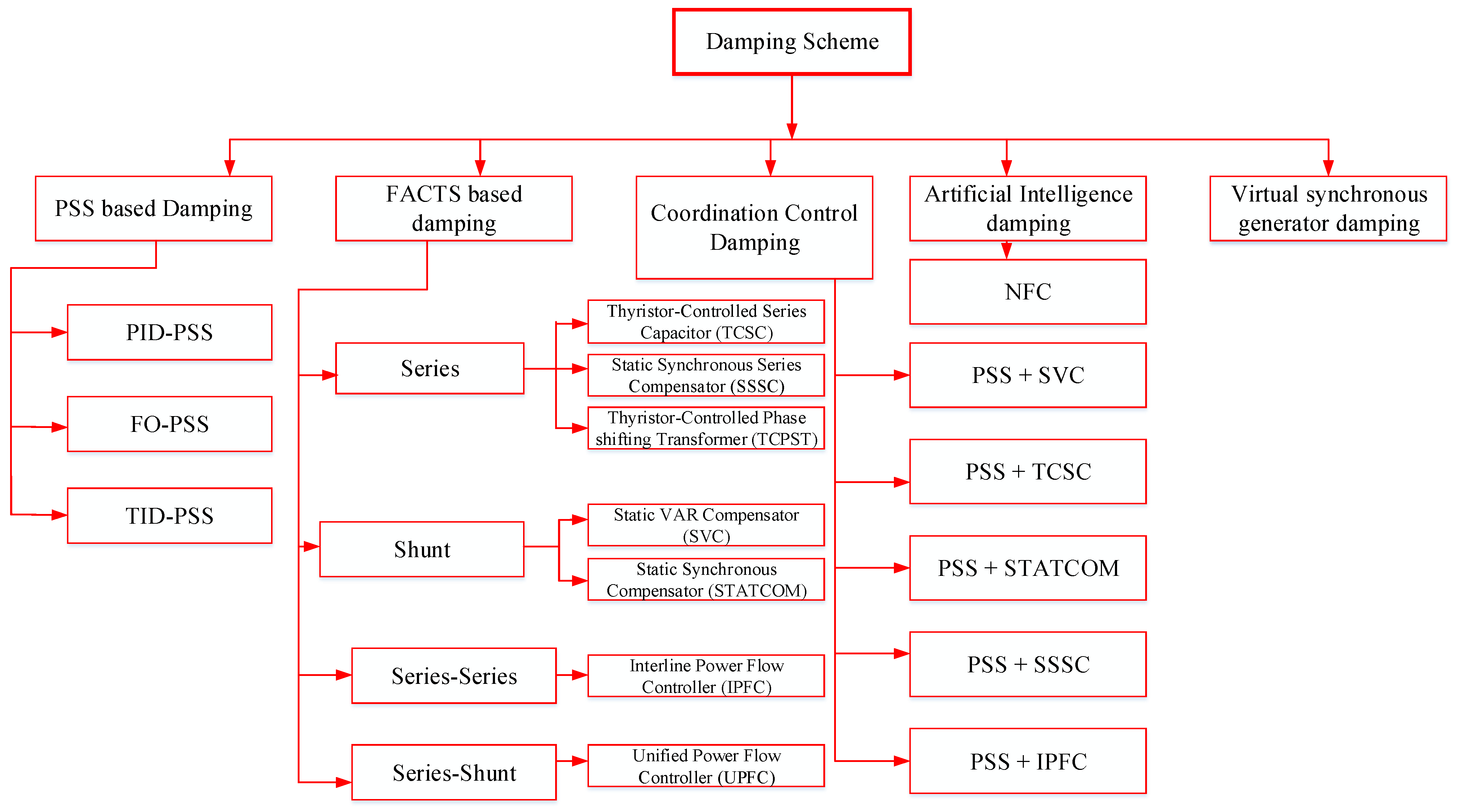
3.4.1. Damping Schemes
PSS-Based Damping
FACTS-Based Damping
Coordination Control Damping
Artificial Intelligence
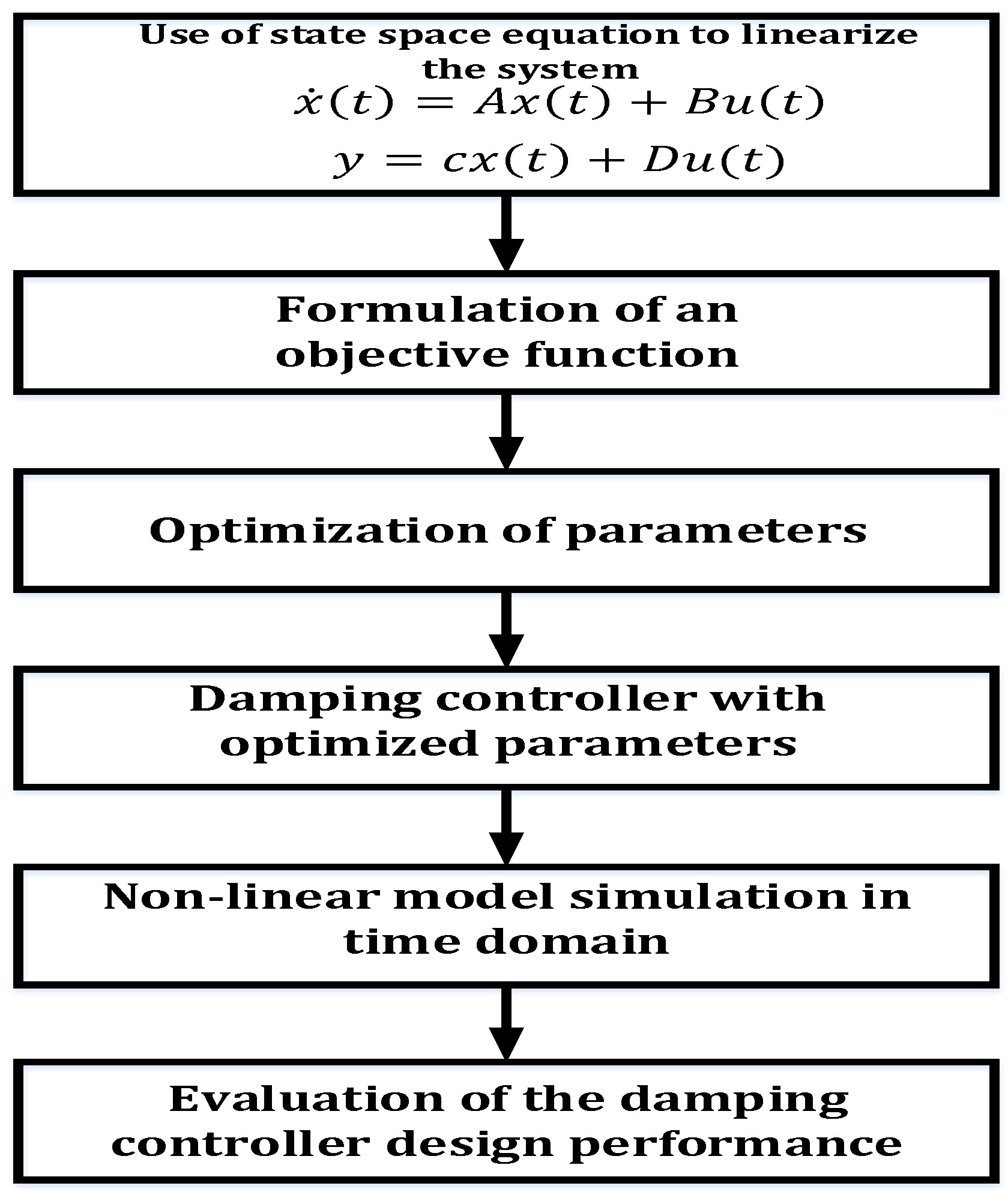
3.5. Damping Controllers
3.5.1. Trimming and Linearization of a Nonlinear Power System
- = output vector;
- = the input vector;
- = state vector, represented as:
- = state matrix;
- = input matrix;
- = output matrix;
- = feedback matrix.
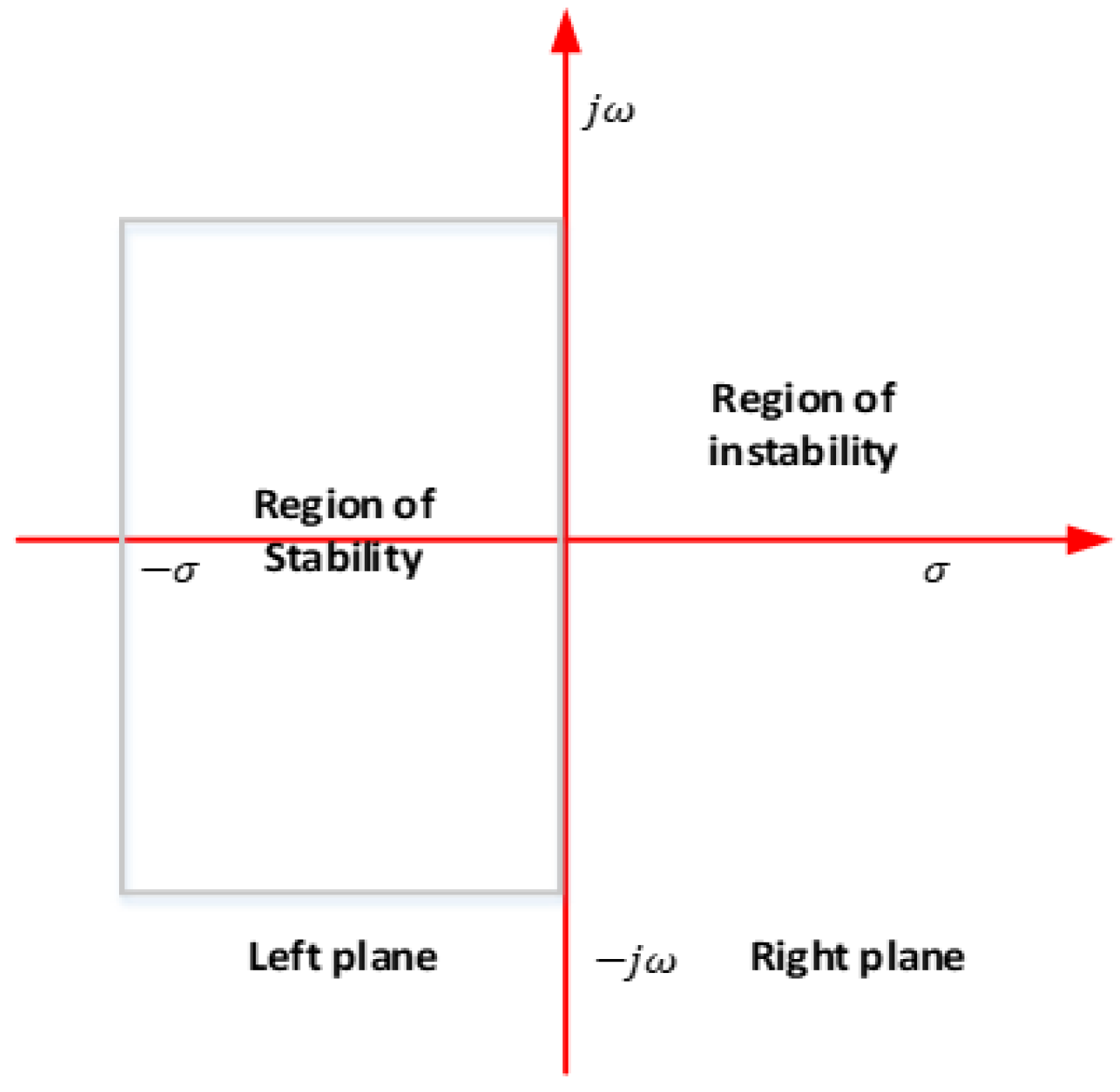
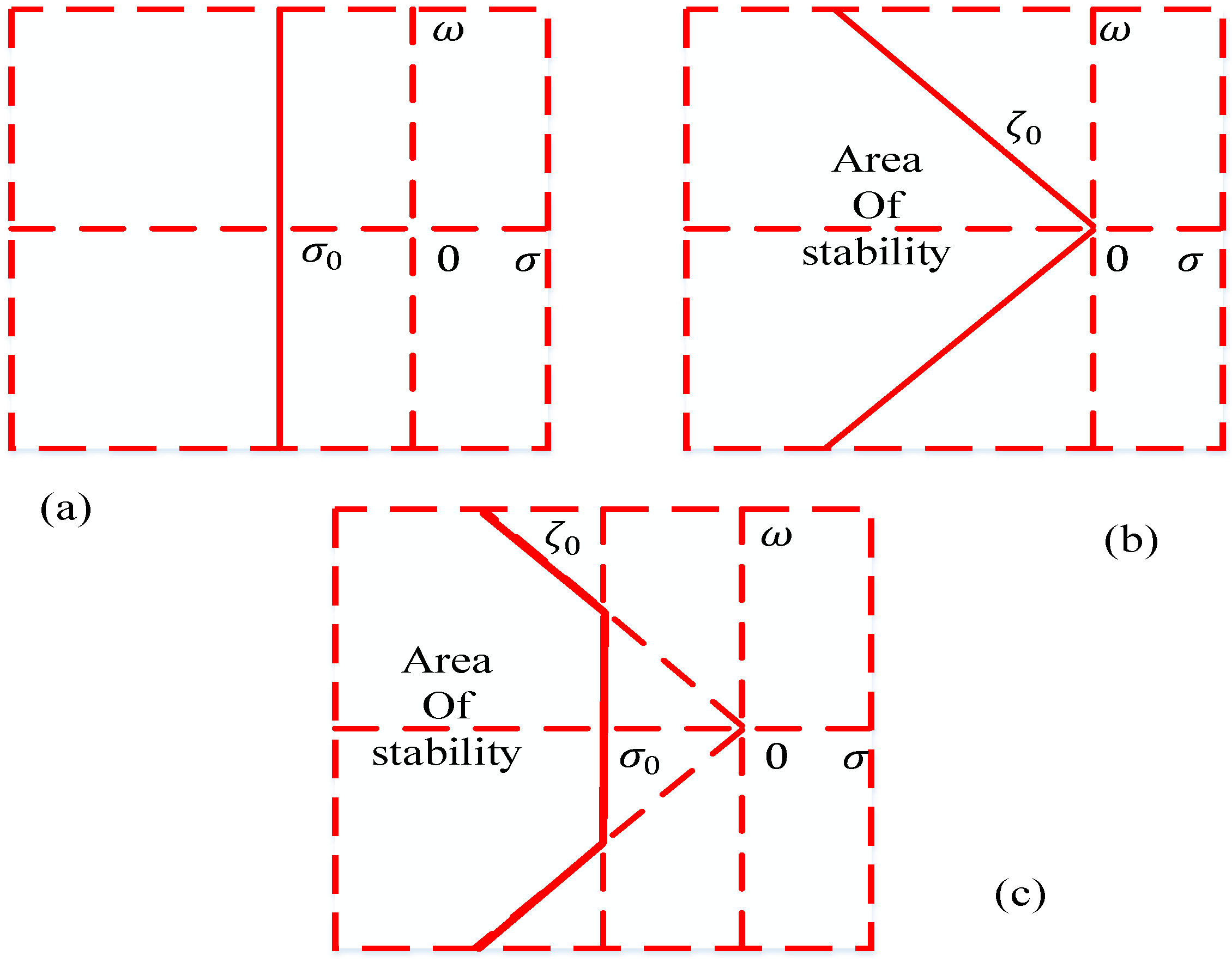
3.5.2. Eigenvalues
3.6. Review of Objective Function Formulation
3.6.1. Singular Objective Function
3.6.2. Multiple Objective Function
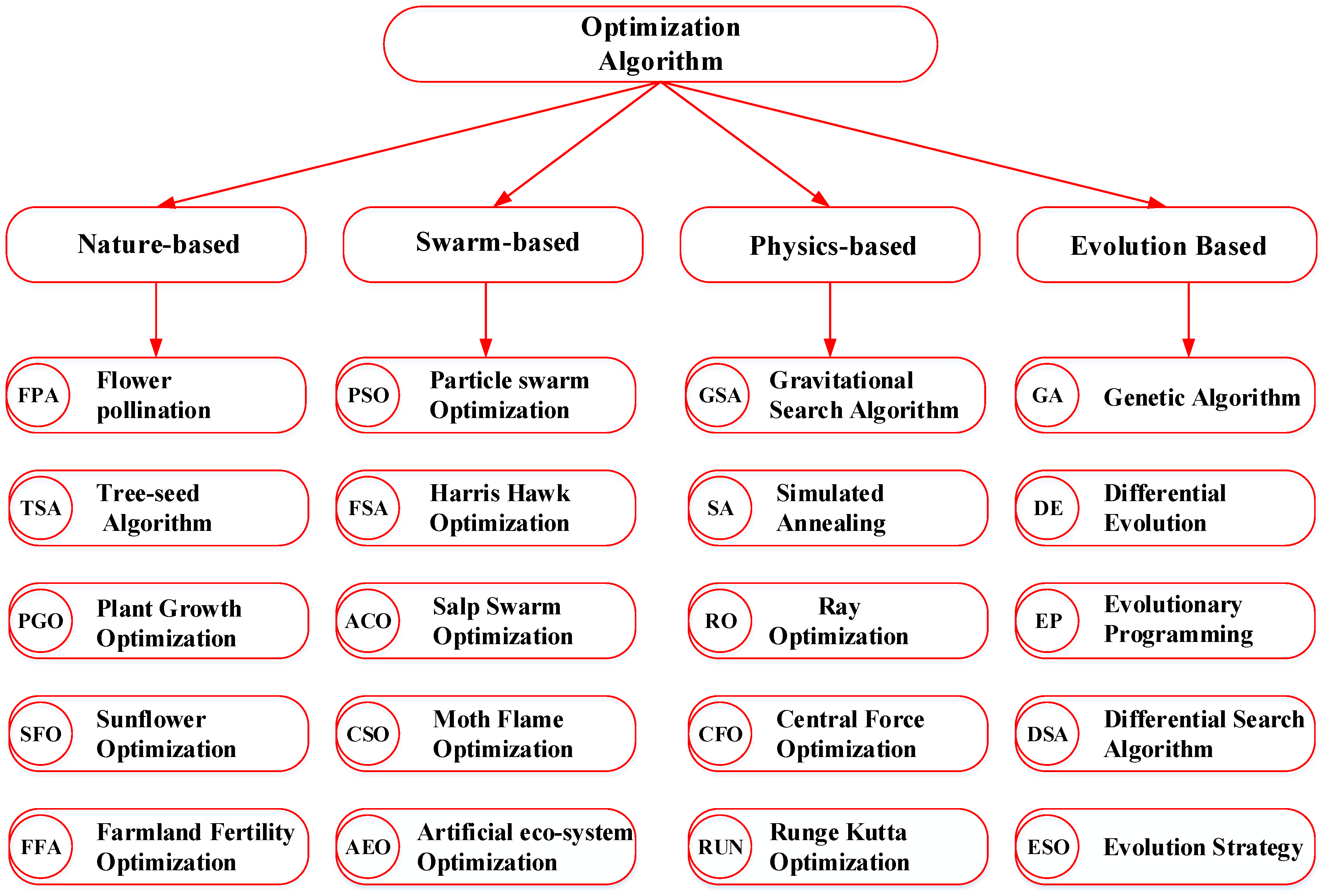
3.7. Optimization Techniques for Damping Controller Design
3.7.1. Particle Swarm Optimization Meta-Heuristic Algorithm
3.7.2. Genetic Algorithms
3.7.3. Tabu Search Algorithm (TS)
3.7.4. Salp Swarm Algorithm
3.7.5. Moth-Flame Algorithm
3.7.6. Sine Cosine Algorithm
3.7.7. Harris Hawk Algorithm
3.7.8. Other Algorithms
3.7.9. Hybrid Algorithms
4. Discussion
4.1. Controller Design limitations in Existing Methods
4.2. Challenges and Trending Issues
4.2.1. Performance and Design of Damping Controller
4.2.2. Objective Function
4.2.3. Implementation of the Meta-Heuristic Algorithm
4.3. Future Outlook
4.4. Conclusions and Recommendations
- ▪
- Artificial intelligent damping type of controller scheme needs to be further explored as there are signs of improved oscillation damping compared with PSS and FACTS;
- ▪
- The objective function definition is a critical part of damping controller design and thus, should be appropriately defined;
- ▪
- Researchers should apply statistical analysis together with the single convergence curve for proper validation in optimizing the parameters of a proposed damping controller which will provide sufficient validation of the convergence curve.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Singh, B.; Murshid, S. A Grid-Interactive Permanent-Magnet Synchronous Motor-Driven Solar Water-Pumping System. IEEE Trans. Ind. Appl. 2018, 54, 5549–5561. [Google Scholar] [CrossRef]
- Camacho Ballesta, J.A.; da Silva Almeida, L.; Rodríguez, M. An analysis of the main driving factors of renewable energy consumption in the European Union. Environ. Sci. Pollut. Res. 2022, 29, 35110–35123. [Google Scholar] [CrossRef]
- Liang, X.; Karim, C.A.-B. Harmonics and Mitigation Techniques Through Advanced Control in Grid-Connected Renewable Energy Sources: A Review. IEEE Trans. Ind. Appl. 2018, 54, 3100–3111. [Google Scholar] [CrossRef]
- Shafiullah, M.; Ahmed, S.D.; Al-Sulaiman, F.A. Grid Integration Challenges and Solution Strategies for Solar PV Systems: A Review. IEEE Access 2022, 10, 52233–52257. [Google Scholar] [CrossRef]
- Zeb, K.; Uddin, W.; Khan, M.A.; Ali, Z.; Ali, M.U.; Christofides, N.; Kim, H.J. A comprehensive review on inverter topologies and control strategies for grid connected photovoltaic system. Renew. Sustain. Energy Rev. 2018, 94, 1120–1141. [Google Scholar] [CrossRef]
- Collados-Rodriguez, C.; Cheah-Mane, M.; Prieto-Araujo, E.; Gomis-Bellmunt, O. Stability and operation limits of power systems with high penetration of power electronics. Int. J. Electr. Power Energy Syst. 2022, 138, 107728. [Google Scholar] [CrossRef]
- Shah, R.; Mithulananthan, N.; Bansal, R.C.; Ramachandaramurthy, V.K. A review of key power system stability challenges for large-scale PV integration. Renew. Sustain. Energy Rev. 2015, 41, 1423–1436. [Google Scholar] [CrossRef]
- Ram, J.P.; Manghani, H.; Pillai, D.S.; Babu, T.S.; Miyatake, M.; Rajasekar, N. Analysis on solar PV emulators: A review. Renew. Sustain. Energy Rev. 2018, 81, 149–160. [Google Scholar] [CrossRef]
- Campanhol, L.B.G.; da Silva, S.A.O.; de Oliveira, A.A.; Bacon, V.D. Power Flow and Stability Analyses of a Multifunctional Distributed Generation System Integrating a Photovoltaic System With Unified Power Quality Conditioner. IEEE Trans. Power Electron. 2019, 34, 6241–6256. [Google Scholar] [CrossRef]
- Islam, M.R.; Mahfuz-Ur-Rahman, A.M.; Muttaqi, K.M.; Sutanto, D. State-of-the-Art of the Medium-Voltage Power Converter Technologies for Grid Integration of Solar Photovoltaic Power Plants. IEEE Trans. Energy Convers. 2019, 34, 372–384. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Blaabjerg, F. Mitigation of interharmonics in PV systems with maximum power point tracking modification. IEEE Trans. power Electron. 2019, 34, 8279–8282. [Google Scholar] [CrossRef] [Green Version]
- Kermadi, M.; Salam, Z.; Ahmed, J.; Berkouk, E.M. An effective hybrid maximum power point tracker of photovoltaic arrays for complex partial shading conditions. IEEE Trans. Ind. Electron. 2018, 66, 6990–7000. [Google Scholar] [CrossRef]
- Pervez, I.; Shams, I.; Mekhilef, S.; Sarwar, A.; Tariq, M.; Alamri, B. Most valuable player algorithm based maximum power point tracking for a partially shaded PV generation system. IEEE Trans. Sustain. Energy 2021, 12, 1876–1890. [Google Scholar] [CrossRef]
- Kermadi, M.; Salam, Z.; Ahmed, J.; Berkouk, E.M. A high-performance global maximum power point tracker of PV system for rapidly changing partial shading conditions. IEEE Trans. Ind. Electron. 2020, 68, 2236–2245. [Google Scholar] [CrossRef]
- Peng, X.; Liu, Z.; Jiang, D. A review of multiphase energy conversion in wind power generation. Renew. Sustain. Energy Rev. 2021, 147, 111172. [Google Scholar] [CrossRef]
- Rezamand, M.; Kordestani, M.; Carriveau, R.; Ting, D.S.-K.; Orchard, M.E.; Saif, M. Critical Wind Turbine Components Prognostics: A Comprehensive Review. IEEE Trans. Instrum. Meas. 2020, 69, 9306–9328. [Google Scholar] [CrossRef]
- Ahmed, S.D.; Al-Ismail, F.S.M.; Shafiullah, M.; Al-Sulaiman, F.A.; El-Amin, I.M. Grid Integration Challenges of Wind Energy: A Review. IEEE Access 2020, 8, 10857–10878. [Google Scholar] [CrossRef]
- Zhang, C.; Cai, X.; Molinas, M.; Rygg, A. On the impedance modeling and equivalence of AC/DC-side stability analysis of a grid-tied type-IV wind turbine system. IEEE Trans. Energy Convers. 2018, 34, 1000–1009. [Google Scholar] [CrossRef]
- Zou, W.; Li, C.; Chen, P. An inter type-2 FCR algorithm based T–S fuzzy model for short-term wind power interval prediction. IEEE Trans. Ind. Inform. 2019, 15, 4934–4943. [Google Scholar] [CrossRef]
- Xie, X.; Liu, W.; Liu, H.; Du, Y.; Li, Y. A system-wide protection against unstable SSCI in series-compensated wind power systems. IEEE Trans. Power Deliv. 2018, 33, 3095–3104. [Google Scholar] [CrossRef]
- Bahrami, S.; Amini, M.H.; Shafie-Khah, M.; Catalao, J.P.S. A decentralized renewable generation management and demand response in power distribution networks. IEEE Trans. Sustain. Energy 2018, 9, 1783–1797. [Google Scholar] [CrossRef]
- Tang, W.; Hu, J.; Chang, Y.; Liu, F. Modeling of DFIG-Based Wind Turbine for Power System Transient Response Analysis in Rotor Speed Control Timescale. IEEE Trans. Power Syst. 2018, 33, 6795–6805. [Google Scholar] [CrossRef]
- Du, W.; Dong, W.; Wang, H.F. Small-Signal Stability Limit of a Grid-Connected PMSG Wind Farm Dominated by the Dynamics of PLLs. IEEE Trans. Power Syst. 2020, 35, 2093–2107. [Google Scholar] [CrossRef]
- Guo, G.; Song, Q.; Zhao, B.; Rao, H.; Xu, S.; Zhu, Z.; Liu, W. Series-Connected-Based Offshore Wind Farms With Full-Bridge Modular Multilevel Converter as Grid- and Generator-side Converters. IEEE Trans. Ind. Electron. 2020, 67, 2798–2809. [Google Scholar] [CrossRef]
- Chen, J.; Liu, M.; O’Loughlin, C.; Milano, F.; O’Donnell, T. Modelling, simulation and hardware-in-the-loop validation of virtual synchronous generator control in low inertia power system. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–7. [Google Scholar]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An Overview of Assessment Methods for Synchronization Stability of Grid-Connected Converters Under Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef] [Green Version]
- Darabian, M.; Bagheri, A.; Behzadpoor, S. A UPFC-based robust damping controller for optimal use of renewable energy sources in modern renewable integrated power systems. IET Gener. Transm. Distrib. 2022, 16, 4115–4131. [Google Scholar] [CrossRef]
- Hannan, M.A.; Islam, N.N.; Mohamed, A.; Lipu, M.S.H.; Ker, P.J.; Rashid, M.M.; Shareef, H. Artificial intelligent based damping controller optimization for the multi-machine power system: A review. IEEE Access 2018, 6, 39574–39594. [Google Scholar] [CrossRef]
- Martins, L.F.B.; de Araujo, P.B.; de Vargas Fortes, E.; Macedo, L.H. Design of the PI–UPFC–POD and PSS Damping Controllers Using an Artificial Bee Colony Algorithm. J. Control. Autom. Electr. Syst. 2017, 28, 762–773. [Google Scholar] [CrossRef] [Green Version]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L.; Jaffar, M.Z.A.M.; Beiranvand, H. Farmland fertility optimization for designing of interconnected multi-machine power system stabilizer. Appl. Model. Simul. 2020, 4, 183–201. [Google Scholar]
- Tu, G.; Li, Y.; Xiang, J.; Ma, J. Distributed power system stabiliser for multimachine power systems. IET Gener. Transm. Distrib. 2019, 13, 603–612. [Google Scholar] [CrossRef]
- Hassan, M.; Abido, M.A.; Aliyu, A. Design of Power System Stabilizer Using Phase Based Objective Function and Heuristic Algorithm. In Proceedings of the 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), Manama, Bahrain, 15–17 April 2019; pp. 1–6. [Google Scholar]
- Pathan, M.I.H.; Rana, M.J.; Shahriar, M.S.; Shafiullah, M.; Zahir, M.H.; Ali, A. Real-time LFO damping enhancement in electric networks employing PSO optimized ANFIS. Inventions 2020, 5, 61. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L.; Jaffar, M.Z.A.B.M.; Acikgoz, H.; Nafisi, H.; Shahinzadeh, H. Artificial Intelligence-Based Power System Stabilizers for Frequency Stability Enhancement in Multi-machine Power Systems. IEEE Access 2021, 9, 166095–166116. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.; Othman, M.L.; Mohd Jaffar, M.Z.; Acikgoz, H.; Beiranvand, H. Application of Neuro-Fuzzy Controller to Replace SMIB and Interconnected Multi-Machine Power System Stabilizers. Sustainability 2020, 12, 9591. [Google Scholar] [CrossRef]
- Sambariya, D.K.; Prasad, R. A novel fuzzy rule matrix design for fuzzy logic-based power system stabilizer. Electr. Power Compon. Syst. 2017, 45, 34–48. [Google Scholar] [CrossRef]
- Khawaja, A.W.; Kamari, N.A.M.; Zainuri, M.A.A.M. Design of a damping controller using the sca optimization technique for the improvement of small signal stability of a single machine connected to an infinite bus system. Energies 2021, 14, 2996. [Google Scholar] [CrossRef]
- Bento, M.E.C. Design of a Resilient Wide-Area Damping Controller Using African Vultures Optimization Algorithm. In Proceedings of the 2021 31st Australasian Universities Power Engineering Conference (AUPEC), Virtual, 26–30 September 2021. [Google Scholar] [CrossRef]
- Maity, S.; Ramya, R. A comprehensive review of damping of low frequency oscillations in power systems. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 133–138. [Google Scholar]
- Zhang, C.; Ke, D.; Sun, Y.; Chung, C.Y.; Xu, J.; Shen, F. Coordinated Supplementary Damping Control of DFIG and PSS to Suppress Inter-Area Oscillations with Optimally Controlled Plant Dynamics. IEEE Trans. Sustain. Energy 2018, 9, 780–791. [Google Scholar] [CrossRef]
- Nahak, N.; Mallick, R.K. Investigation and damping<? show [AQ ID= Q1]?> of low-frequency oscillations of stochastic solar penetrated power system by optimal dual UPFC. IET Renew. Power Gener. 2019, 13, 376–388. [Google Scholar]
- El-Dabah, M.A.; Kamel, S.; Khamies, M.; Shahinzadeh, H.; Gharehpetian, G.B. Artificial Gorilla Troops Optimizer for Optimum Tuning of TID Based Power System Stabilizer. In Proceedings of the 2022 9th Iranian Joint Congress on Fuzzy and Intelligent Systems (CFIS), Bam, Iran, 2–4 March 2022; pp. 1–5. [Google Scholar]
- Davut, I.Z.C.I. A novel modified arithmetic optimization algorithm for power system stabilizer design. Sigma J. Eng. Nat. Sci. 2022, 40, 529–541. [Google Scholar]
- Sabo, A.; Abdul Wahab, N.I.; Othman, M.L.; Mohd Jaffar, M.Z.A.; Beiranvand, H.; Acikgoz, H. Application of a neuro-fuzzy controller for single machine infinite bus power system to damp low-frequency oscillations. Trans. Inst. Meas. Control 2021, 43, 3633–3646. [Google Scholar] [CrossRef]
- El-Kareem, A.; Hesham, A.; Abd Elhameed, M.; Elkholy, M.M. Effective damping of local low frequency oscillations in power systems integrated with bulk PV generation. Prot. Control Mod. Power Syst. 2021, 6, 1–13. [Google Scholar] [CrossRef]
- Nogami, S.; Yokoyama, A.; Amano, H.; Daibu, T. Virtual synchronous generator model based control of PV for power system stability improvement in a large-scale power system with a massive integration of PVs. J. Int. Counc. Electr. Eng. 2018, 8, 112–118. [Google Scholar] [CrossRef]
- Beiranvand, H.; Rokrok, E.; Shakarami, M.R.; Kumar, A.; Gopalakrishna, S.; Mohanty, S. MatSim: A Matpower and Simulink based tool for power system dynamics course education. In Proceedings of the 31th Power System Conference, Tehran, Iran, 24–26 October 2016; pp. 1–6. [Google Scholar]
- Naves, A.X.; Barreneche, C.; Fernández, A.I.; Cabeza, L.F.; Haddad, A.N.; Boer, D. Life cycle costing as a bottom line for the life cycle sustainability assessment in the solar energy sector: A review. Sol. Energy 2019, 192, 238–262. [Google Scholar] [CrossRef]
- Molaei, M.J. The optical properties and solar energy conversion applications of carbon quantum dots: A review. Sol. Energy 2020, 196, 549–566. [Google Scholar] [CrossRef]
- Ahmed, R.; Sreeram, V.; Mishra, Y.; Arif, M.D. A review and evaluation of the state-of-the-art in PV solar power forecasting: Techniques and optimization. Renew. Sustain. Energy Rev. 2020, 124, 109792. [Google Scholar] [CrossRef]
- Koutroulis, E.; Yang, Y.; Blaabjerg, F. Co-Design of the PV Array and DC/AC Inverter for Maximizing the Energy Production in Grid-Connected Applications. IEEE Trans. Energy Convers. 2019, 34, 509–519. [Google Scholar] [CrossRef] [Green Version]
- Pazikadin, A.R.; Rifai, D.; Ali, K.; Malik, M.Z.; Abdalla, A.N.; Faraj, M.A. Solar irradiance measurement instrumentation and power solar generation forecasting based on Artificial Neural Networks (ANN): A review of five years research trend. Sci. Total Environ. 2020, 715, 136848. [Google Scholar] [CrossRef]
- Li, G.; Xie, S.; Wang, B.; Xin, J.; Li, Y.; Du, S. Photovoltaic power forecasting with a hybrid deep learning approach. IEEE Access 2020, 8, 175871–175880. [Google Scholar] [CrossRef]
- Zhen, Z.; Liu, J.; Zhang, Z.; Wang, F.; Chai, H.; Yu, Y.; Lu, X.; Wang, T.; Lin, Y. Deep learning based surface irradiance mapping model for solar PV power forecasting using sky image. IEEE Trans. Ind. Appl. 2020, 56, 3385–3396. [Google Scholar] [CrossRef]
- REN21 Renewables Now. Renewables in Cities 2021 Global Status Report. REN21 Secr. Paris Fr. 2021. Available online: https://www.ren21.net/reports/global-status-report/ (accessed on 24 October 2022).
- Muisyo, I.N.; Muriithi, C.M.; Kamau, S.I. Enhancing low voltage ride through capability of grid connected DFIG based WECS using WCA-PSO tuned STATCOM controller. Heliyon 2022, 8, e09999. [Google Scholar] [CrossRef] [PubMed]
- Bhukya, J.; Mahajan, V. Optimization of damping controller for PSS and SSSC to improve stability of interconnected system with DFIG based wind farm. Int. J. Electr. Power Energy Syst. 2019, 108, 314–335. [Google Scholar] [CrossRef]
- Ali, M.A.S.; Mehmood, K.K.; Baloch, S.; Kim, C.-H. Modified rotor-side converter control design for improving the LVRT capability of a DFIG-based WECS. Electr. Power Syst. Res. 2020, 186, 106403. [Google Scholar] [CrossRef]
- Alsakati, A.A.; Vaithilingam, C.A.; Alnasseir, J.; Jagadeeshwaran, A. Simplex search method driven design for transient stability enhancement in wind energy integrated power system using multi-band PSS4C. IEEE Access 2021, 9, 83913–83928. [Google Scholar] [CrossRef]
- Ang, T.-Z.; Salem, M.; Kamarol, M.; Das, H.S.; Nazari, M.A.; Prabaharan, N. A comprehensive study of renewable energy sources: Classifications, challenges and suggestions. Energy Strateg. Rev. 2022, 43, 100939. [Google Scholar] [CrossRef]
- Jin, J.X.; Yang, R.H.; Zhang, R.T.; Fan, Y.J.; Xie, Q.; Chen, X.Y. Combined low voltage ride through and power smoothing control for DFIG/PMSG hybrid wind energy conversion system employing a SMES-based AC-DC unified power quality conditioner. Int. J. Electr. Power Energy Syst. 2021, 128, 106733. [Google Scholar] [CrossRef]
- Mwaniki, J.; Lin, H.; Dai, Z. A Condensed Introduction to the Doubly Fed Induction Generator Wind Energy Conversion Systems. J. Eng. 2017, 2017, 2918281. [Google Scholar] [CrossRef] [Green Version]
- Bonfiglio, A.; Delfino, F.; Gonzalez-Longatt, F.; Procopio, R. Steady-state assessments of PMSGs in wind generating units. Int. J. Electr. Power Energy Syst. 2017, 90, 87–93. [Google Scholar] [CrossRef] [Green Version]
- Sadhana, S.G.; Ashok, S.; Kumaravel, S. Small signal stability analysis of grid connected renewable energy resources with the effect of uncertain wind power penetration. Energy Procedia 2017, 117, 769–776. [Google Scholar] [CrossRef]
- Bezerra, M.A.A.; Oliveira, J.L.W.; Praça, P.P.; Oliveira, D.S.; Barreto, L.H.S.C.; de Almeida, B.R. Isolated AC-DC Interleaved Converter for MVDC Collection Grid in HVDC Offshore Wind Farm. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1926–1933. [Google Scholar]
- Li, Z.; Song, Q.; An, F.; Zhao, B.; Yu, Z.; Zeng, R. Review on DC transmission systems for integrating large-scale offshore wind farms. Energy Convers. Econ. 2021, 2, 1–14. [Google Scholar] [CrossRef]
- Abeynayake, G.; Li, G.; Liang, J.; Cutululis, N.A. A review on MVdc collection systems for high-power offshore wind farms. In Proceedings of the 2019 14th Conference on Industrial and Information Systems (ICIIS), Kandy, Sri Lanka, 18–20 December 2019; pp. 407–412. [Google Scholar]
- Islam, M.R.; Rahman, M.A.; Muttaqi, K.M.; Sutanto, D. A new magnetic-linked converter for grid integration of offshore wind turbines through MVDC transmission. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Kou, P.; Liang, D.; Wu, Z.; Ze, Q.; Gao, L. Frequency support from a dc-grid offshore wind farm connected through an hvdc link: A communication-free approach. IEEE Trans. Energy Convers. 2018, 33, 1297–1310. [Google Scholar] [CrossRef]
- Kumar, K.; Babu, N.R.; Prabhu, K.R. Design and analysis of RBFN-based single MPPT controller for hybrid solar and wind energy system. IEEE access 2017, 5, 15308–15317. [Google Scholar] [CrossRef]
- Li, S.; Li, J. Output predictor-based active disturbance rejection control for a wind energy conversion system with PMSG. IEEE Access 2017, 5, 5205–5214. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N.; Miyatake, M. Design and overview of maximum power point tracking techniques in wind and solar photovoltaic systems: A review. Renew. Sustain. Energy Rev. 2017, 73, 1138–1159. [Google Scholar] [CrossRef]
- Tiwari, R.; Babu, N.R. Recent developments of control strategies for wind energy conversion system. Renew. Sustain. Energy Rev. 2016, 66, 268–285. [Google Scholar] [CrossRef]
- Abdul Basit, B.; Nguyen, A.T.; Ryu, S.; Park, H.; Jung, J. A state-of-the-art comprehensive review of modern control techniques for grid-connected wind turbines and photovoltaic arrays distributed generation systems. IET Renew. Power Gener. 2022, 16, 2191–2222. [Google Scholar] [CrossRef]
- Mao, M.; Cui, L.; Zhang, Q.; Guo, K.; Zhou, L.; Huang, H. Classification and summarization of solar photovoltaic MPPT techniques: A review based on traditional and intelligent control strategies. Energy Reports 2020, 6, 1312–1327. [Google Scholar] [CrossRef]
- Premkumar, M.; Sowmya, R. An effective maximum power point tracker for partially shaded solar photovoltaic systems. Energy Reports 2019, 5, 1445–1462. [Google Scholar] [CrossRef]
- Azar, A.T.; Serrano, F.E. Design and modeling of anti wind up PID controllers. In Complex System Modelling and Control through Intelligent Soft Computations; Springer: Cham, Switzerland, 2015; pp. 1–44. [Google Scholar]
- Ghoudelbourk, S.; Dib, D.; Omeiri, A.; Azar, A.T. MPPT control in wind energy conversion systems and the application of fractional control (PIα) in pitch wind turbine. Int. J. Model. Identif. Control 2016, 26, 140–151. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel fast and high accuracy maximum power point tracking method for hybrid photovoltaic/fuel cell energy conversion systems. Renew. Energy 2017, 106, 232–242. [Google Scholar] [CrossRef]
- Huang, L.; Xin, H.; Li, Z.; Ju, P.; Yuan, H.; Lan, Z.; Wang, Z. Grid-synchronization stability analysis and loop shaping for PLL-based power converters with different reactive power control. IEEE Trans. Smart Grid 2019, 11, 501–516. [Google Scholar] [CrossRef]
- Du, W.; Chen, X.; Wang, H. Parameter tuning of the PLL to consider the effect on power system small-signal angular stability. IET Renew. Power Gener. 2018, 12, 1–8. [Google Scholar] [CrossRef]
- Verma, A.K.; Jarial, R.K.; Rao, U.M.; Roncero-Sánchez, P. A Robust Three-Phase Prefiltered Phase Locked-Loop for the Subcycle Estimation of Fundamental Parameters. IEEE Trans. Ind. Appl. 2021, 57, 6155–6166. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C. A PLL-based controller for three-phase grid-connected power converters. IEEE Trans. Power Electron. 2017, 33, 911–916. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Khajehoddin, S.A.; Piya, P.; Ebrahimi, M. Universal controller for three-phase inverters in a microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1342–1353. [Google Scholar] [CrossRef]
- Simonetti, D.S.L.; Amorim, A.E.A.; Oliveira, F.D.C. Doubly fed induction generator in wind energy conversion systems. In Advances in Renewable Energies and Power Technologies; Elsevier: Amsterdam, The Netherlands, 2018; pp. 461–490. [Google Scholar]
- Khawaja, A.W.; Kamari, N.A.M.; Zainuri, M.A.A.M. Design of a Damping Controller Using a Metaheuristic Algorithm for Angle Stability Improvement of an MIB System. Appl. Sci. 2022, 12, 589. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.A. Rotor angle transient stability methodologies of power systems: A comparison. In Proceedings of the 2019 IEEE Student Conference on Research and Development (SCOReD), Bandar Seri Iskandar, Malaysia, 15–17 October 2019; pp. 1–6. [Google Scholar]
- Nazari, V.; Mousavi, M.H.; Cheshmehbeigi, H.M. Reduction of Low Frequency Oscillations Using an Enhanced Power System Stabilizer via Linear Parameter Varying Approach. J. Renew. Energy Environ. 2022, 9, 59–74. [Google Scholar]
- Vargas, E.D.; Macedo, L.H.; Bueno, P.; Araujo, D.; Romero, R. Electrical Power and Energy Systems A VNS algorithm for the design of supplementary damping controllers for small-signal stability analysis. Int. J. Electr. Power Energy Syst. 2018, 94, 41–56. [Google Scholar] [CrossRef] [Green Version]
- Hatziargyriou, N.; Milanovic, J.; Rahmann, C.; Ajjarapu, V.; Canizares, C.; Erlich, I.; Hill, D.; Hiskens, I.; Kamwa, I.; Pal, B. Definition and classification of power system stability–revisited & extended. IEEE Trans. Power Syst. 2020, 36, 3271–3281. [Google Scholar]
- Zheng, Z.; An, Z.; Shen, C. Evaluation method for equivalent models of PMSG-based wind farms considering randomness. IEEE Trans. Sustain. Energy 2018, 10, 1565–1574. [Google Scholar] [CrossRef]
- Hu, Y.; Bu, S.; Yi, S.; Zhu, J.; Luo, J.; Wei, Y. A Novel Energy Flow Analysis and Its Connection With Modal Analysis for Investigating Electromechanical Oscillations in Multi-Machine Power Systems. IEEE Trans. Power Syst. 2021, 37, 1139–1150. [Google Scholar] [CrossRef]
- Mauricio, J.M.; Leon, A.E. Improving small-signal stability of power systems with significant converter-interfaced generation. IEEE Trans. Power Syst. 2020, 35, 2904–2914. [Google Scholar] [CrossRef] [Green Version]
- Du, W.; Chen, X.; Wang, H. PLL-induced modal resonance of grid-connected PMSGs with the power system electromechanical oscillation modes. IEEE Trans. Sustain. Energy 2017, 8, 1581–1591. [Google Scholar] [CrossRef]
- Ying, J.; Yuan, X.; Hu, J.; He, W. Impact of inertia control of DFIG-based WT on electromechanical oscillation damping of SG. IEEE Trans. Power Syst. 2018, 33, 3450–3459. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Blaabjerg, F. Modelling, implementation, and assessment of virtual synchronous generator in power systems. J. Mod. Power Syst. Clean Energy 2020, 8, 399–411. [Google Scholar] [CrossRef]
- Othman, M.H.; Mokhlis, H.; Mubin, M.; Talpur, S.; Ab Aziz, N.F.; Dradi, M.; Mohamad, H. Progress in control and coordination of energy storage system-based VSG: A review. IET Renew. Power Gener. 2020, 14, 177–187. [Google Scholar] [CrossRef]
- Wang, Y.; Meng, J.; Zhang, X.; Xu, L. Control of PMSG-based wind turbines for system inertial response and power oscillation damping. IEEE Trans. Sustain. Energy 2015, 6, 565–574. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Lin, P.; Li, H.; Yang, Y.; Tang, Y. An improved virtual inertia control for three-phase voltage source converters connected to a weak grid. IEEE Trans. Power Electron. 2018, 34, 8660–8670. [Google Scholar] [CrossRef] [Green Version]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L. Coordinated Design of PSS and IPFC Using FFA to Control Low Frequency Oscillations. In Proceedings of the 2021 IEEE 19th Student Conference on Research and Development (SCOReD), Kota Kinabalu, Malaysia, 23–25 November 2021; 2021; pp. 201–206. [Google Scholar]
- Sabo, A.; Abdul Wahab, N.I.; Othman, M.L.; Mohd Jaffar, M.Z.A.; Beiranvand, H. Optimal design of power system stabilizer for multimachine power system using farmland fertility algorithm. Int. Trans. Electr. Energy Syst. 2020, 30, e12657. [Google Scholar] [CrossRef]
- Tzounas, G.; Sipahi, R.; Milano, F. Damping power system electromechanical oscillations using time delays. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2725–2735. [Google Scholar] [CrossRef]
- Mujeer, S.A.; Dwarasila, M.K.; Chintala, J.D.; Adimulam, V.S.K. Low frequency oscillations damping by design of power system stabilizer using intelligent controllers. Mater. Today Proc. 2021. In Press. [Google Scholar]
- Tare, A.; Jadhav, S.S.; Pande, V.N.; Ghanegaonkar, S.P. Design of Power System Stabilizer as Second-Order Sliding Mode Controller. In Smart Sensors Measurements and Instrumentation; Springer: Basel, Switzerland, 2021; pp. 295–305. [Google Scholar]
- Verdejo, H.; Pino, V.; Kliemann, W.; Becker, C.; Delpiano, J. Implementation of particle swarm optimization (PSO) algorithm for tuning of power system stabilizers in multimachine electric power systems. Energies 2020, 13, 2093. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, S.; Isbeih, Y.J.; El Moursi, M.S.; El-Saadany, E.F. Cross-gramian model reduction approach for tuning power system stabilizers in large power networks. IEEE Trans. Power Syst. 2019, 35, 1911–1922. [Google Scholar] [CrossRef]
- Chitara, D.; Niazi, K.R.; Swarnkar, A.; Gupta, N. Cuckoo search optimization algorithm for designing of a multimachine power system stabilizer. IEEE Trans. Ind. Appl. 2018, 54, 3056–3065. [Google Scholar] [CrossRef]
- Zhou, J.; Ke, D.; Chung, C.Y.; Sun, Y. A computationally efficient method to design probabilistically robust wide-area PSSs for damping inter-area oscillations in wind-integrated power systems. IEEE Trans. Power Syst. 2018, 33, 5692–5703. [Google Scholar] [CrossRef]
- Shukla, A.; Gupta, A.K. Damping enhancement of DFIG integrated power system by coordinated controllers tuning using marine predators algorithm. In Control Applications in Modern Power System; Springer: Singapore, 2021; pp. 165–176. [Google Scholar]
- Kohan, V.; Conka, Z.; Kolcun, M.; Karabinos, M.; Havran, P.; Stefko, R.; Tailor, R.J. Use of Flexible Alternating Current Transmission System to improve power system operation—Damping oscillation and power flow control. In Proceedings of the 2021 IEEE 4th International Conference and Workshop Óbuda on Electrical and Power Engineering (CANDO-EPE), Budapest, Hungary, 17–18 November 2021; pp. 113–118. [Google Scholar]
- Yu, S.; Chau, T.K.; Fernando, T.; Savkin, A.V.; Iu, H.H.-C. Novel quasi-decentralized SMC-based frequency and voltage stability enhancement strategies using valve position control and FACTS device. IEEE Access 2016, 5, 946–955. [Google Scholar] [CrossRef]
- Shair, J.; Xie, X.; Yang, J.; Li, J.; Li, H. Adaptive damping control of subsynchronous oscillation in DFIG-based wind farms connected to series-compensated network. IEEE Trans. Power Deliv. 2021, 37, 1036–1049. [Google Scholar] [CrossRef]
- Guo, J.; Zenelis, I.; Wang, X.; Ooi, B.-T. WAMS-based model-free wide-area damping control by voltage source converters. IEEE Trans. Power Syst. 2020, 36, 1317–1327. [Google Scholar] [CrossRef]
- Basu, M.; Mahindara, V.R.; Kim, J.; Nelms, R.M.; Muljadi, E. Comparison of active and reactive power oscillation damping with pv plants. IEEE Trans. Ind. Appl. 2021, 57, 2178–2186. [Google Scholar] [CrossRef]
- Alghamdi, S.; Markovic, U.; Stanojev, O.; Schiffer, J.; Hug, G.; Aristidou, P. Wide-area oscillation damping in low-inertia grids under time-varying communication delays. Electr. Power Syst. Res. 2020, 189, 106629. [Google Scholar] [CrossRef]
- Bhattacharyya, B.; Kumar, S. Approach for the solution of transmission congestion with multi-type FACTS devices. IET Gener. Transm. Distrib. 2016, 10, 2802–2809. [Google Scholar] [CrossRef]
- Surinkaew, T.; Ngamroo, I. Two-level coordinated controllers for robust inter-area oscillation damping considering impact of local latency. IET Gener. Transm. Distrib. 2017, 11, 4520–4530. [Google Scholar] [CrossRef]
- Naghshbandy, A.H.; Faraji, A. Coordinated design of PSS and unified power flow controller using the combination of CWT and Prony methods with the help of SPEA II multi-objective optimisation algorithm. IET Gener. Transm. Distrib. 2019, 13, 4900–4909. [Google Scholar] [CrossRef]
- Guesmi, T.; Alshammari, B.M.; Almalaq, Y.; Alateeq, A.; Alqunun, K. New coordinated tuning of SVC and PSSs in multimachine power system using coyote optimization algorithm. Sustainability 2021, 13, 3131. [Google Scholar] [CrossRef]
- Fan, X.; Shu, J.; Zhang, B. Coordinated control of DC grid and offshore wind farms to improve rotor-angle stability. IEEE Trans. Power Syst. 2018, 33, 4625–4633. [Google Scholar] [CrossRef]
- Toolabi Moghadam, A.; Aghahadi, M.; Eslami, M.; Rashidi, S.; Arandian, B.; Nikolovski, S. Adaptive Rat Swarm Optimization for Optimum Tuning of SVC and PSS in a Power System. Int. Trans. Electr. Energy Syst. 2022, 2022, 4798029. [Google Scholar] [CrossRef]
- Khampariya, P.; Panda, S.; Alharbi, H.; Abdelaziz, A.Y.; Ghoneim, S.S.M. Coordinated Design of Type-2 Fuzzy Lead–Lag-Structured SSSCs and PSSs for Power System Stability Improvement. Sustainability 2022, 14, 6656. [Google Scholar] [CrossRef]
- Eshkaftaki, A.A.; Rabiee, A.; Kargar, A.; Boroujeni, S.T. An applicable method to improve transient and dynamic performance of power system equipped with DFIG-based wind turbines. IEEE Trans. Power Syst. 2019, 35, 2351–2361. [Google Scholar] [CrossRef]
- Uddin, W.; Zeb, N.; Zeb, K.; Ishfaq, M.; Khan, I.; Ul Islam, S.; Tanoli, A.; Haider, A.; Kim, H.-J.; Park, G.-S. A neural network-based model reference control architecture for oscillation damping in interconnected power system. Energies 2019, 12, 3653. [Google Scholar] [CrossRef] [Green Version]
- Gupta, P.; Pal, A.; Vittal, V. Coordinated Wide-Area Damping Control Using Deep Neural Networks and Reinforcement Learning. IEEE Trans. Power Syst. 2021, 37, 365–376. [Google Scholar] [CrossRef]
- Ghodsi, M.R.; Tavakoli, A.; Samanfar, A. Microgrid Stability Improvement Using a Deep Neural Network Controller Based VSG. Int. Trans. Electr. Energy Syst. 2022, 2022, 7539173. [Google Scholar] [CrossRef]
- Lee, H.-J.; Jhang, S.-S.; Yu, W.-K.; Oh, J.-H. Artificial neural network control of battery energy storage system to damp-out inter-area oscillations in power systems. Energies 2019, 12, 3372. [Google Scholar] [CrossRef] [Green Version]
- Gomis-Bellmunt, O.; Sau-Bassols, J.; Prieto-Araujo, E.; Cheah-Mane, M. Flexible converters for meshed HVDC grids: From flexible AC transmission systems (FACTS) to flexible DC grids. IEEE Trans. Power Deliv. 2019, 35, 2–15. [Google Scholar] [CrossRef]
- Zhang, G.; Hu, W.; Zhao, J.; Cao, D.; Chen, Z.; Blaabjerg, F. A novel deep reinforcement learning enabled multi-band pss for multi-mode oscillation control. IEEE Trans. Power Syst. 2021, 36, 3794–3797. [Google Scholar] [CrossRef]
- Tan, K.-H.; Lin, F.-J.; Shih, C.-M.; Kuo, C.-N. Intelligent control of microgrid with virtual inertia using recurrent probabilistic wavelet fuzzy neural network. IEEE Trans. Power Electron. 2019, 35, 7451–7464. [Google Scholar] [CrossRef]
- Osipov, D.; Sun, K. Adaptive nonlinear model reduction for fast power system simulation. IEEE Trans. Power Syst. 2018, 33, 6746–6754. [Google Scholar] [CrossRef]
- Rogers, G. Modal analysis for control. In Power System Oscillations; Springer: Boston, MA, USA, 2000; pp. 75–100. [Google Scholar]
- Milano, F. An open source power system analysis toolbox. IEEE Trans. Power Syst. 2005, 20, 1199–1206. [Google Scholar] [CrossRef]
- Cole, S.; Belmans, R. Matdyn, a new matlab-based toolbox for power system dynamic simulation. IEEE Trans. Power Syst. 2010, 26, 1129–1136. [Google Scholar] [CrossRef]
- Zhang, K.; Shi, Z.; Huang, Y.; Qiu, C.; Yang, S. SVC damping controller design based on novel modified fruit fly optimisation algorithm. IET Renew. Power Gener. 2018, 12, 90–97. [Google Scholar] [CrossRef]
- Gheisarnejad, M. An effective hybrid harmony search and cuckoo optimization algorithm based fuzzy PID controller for load frequency control. Appl. Soft Comput. 2018, 65, 121–138. [Google Scholar] [CrossRef]
- Chen, Y.; Xie, Z.; Zhou, L.; Wang, Z.; Zhou, X.; Wu, W.; Yang, L.; Luo, A. Optimized design method for grid-current-feedback active damping to improve dynamic characteristic of LCL-type grid-connected inverter. Int. J. Electr. Power Energy Syst. 2018, 100, 19–28. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Tapia, J.A.; Pyrhönen, J.J.; Cavagnino, A. Modern electrical machine design optimization: Techniques, trends, and best practices. IEEE Trans. Ind. Electron. 2018, 65, 7672–7684. [Google Scholar] [CrossRef]
- Sun, S.; Cao, Z.; Zhu, H.; Zhao, J. A survey of optimization methods from a machine learning perspective. IEEE Trans. Cybern. 2019, 50, 3668–3681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, Y.; Liu, C.; Sun, K.; Shi, D.; Wang, Z. Optimization of battery energy storage to improve power system oscillation damping. IEEE Trans. Sustain. Energy 2018, 10, 1015–1024. [Google Scholar] [CrossRef] [Green Version]
- Morshed, M.J.; Fekih, A. A probabilistic robust coordinated approach to stabilize power oscillations in DFIG-based power systems. IEEE Trans. Ind. Informatics 2019, 15, 5599–5612. [Google Scholar] [CrossRef]
- Dziwiński, P.; Bartczuk, Ł. A new hybrid particle swarm optimization and genetic algorithm method controlled by fuzzy logic. IEEE Trans. Fuzzy Syst. 2019, 28, 1140–1154. [Google Scholar] [CrossRef]
- Wang, D.; Ma, N.; Wei, M.; Liu, Y. Parameters tuning of power system stabilizer PSS4B using hybrid particle swarm optimization algorithm. Int. Trans. Electr. Energy Syst. 2018, 28, e2598. [Google Scholar] [CrossRef]
- Latif, S.; Irshad, S.; Ahmadi Kamarposhti, M.; Shokouhandeh, H.; Colak, I.; Eguchi, K. Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization. Electronics 2022, 11, 946. [Google Scholar] [CrossRef]
- Bhukya, J.; Mahajan, V. Parameter tuning of PSS and STATCOM controllers using genetic algorithm for improvement of small-signal and transient stability of power systems with wind power. Int. Trans. Electr. Energy Syst. 2021, 31, e12912. [Google Scholar] [CrossRef]
- Verdejo, H.; Torres, R.; Pino, V.; Kliemann, W.; Becker, C.; Delpiano, J. Tuning of Controllers in Power Systems Using a Heuristic-Stochastic Approach. Energies 2019, 12. [Google Scholar] [CrossRef] [Green Version]
- Abualigah, L.; Diabat, A. Advances in Sine Cosine Algorithm: A comprehensive survey. Artif. Intell. Rev. 2021, 54, 2567–2608. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Alabool, H. Salp swarm algorithm: A comprehensive survey. Neural Comput. Appl. 2020, 32, 11195–11215. [Google Scholar] [CrossRef]
- Dey, P.; Mitra, S.; Bhattacharya, A.; Das, P. Comparative study of the effects of SVC and TCSC on the small signal stability of a power system with renewables. J. Renew. Sustain. Energy 2019, 11, 33305. [Google Scholar] [CrossRef]
- Shehab, M.; Abualigah, L.; Al Hamad, H.; Alabool, H.; Alshinwan, M.; Khasawneh, A.M. Moth–flame optimization algorithm: Variants and applications. Neural Comput. Appl. 2020, 32, 9859–9884. [Google Scholar] [CrossRef]
- Agrawal, N.; Gowda, M. Comparison of Damping Control Performance of PID, PSS and TCSC Controllers by Moth Flame Optimization Algorithm. INFOCOMP J. Comput. Sci. 2022, 21. Available online: https://infocomp.dcc.ufla.br/index.php/infocomp/article/view/2089 (accessed on 20 October 2022).
- Shehab, M.; Alshawabkah, H.; Abualigah, L.; AL-Madi, N. Enhanced a hybrid moth-flame optimization algorithm using new selection schemes. Eng. Comput. 2021, 37, 2931–2956. [Google Scholar] [CrossRef]
- Devarapalli, R.; Bhattacharyya, B. Optimal controller parameter tuning of PSS using sine-cosine algorithm. In Metaheuristic and Evolutionary Computation: Algorithms and Applications; Springer: Singapore, 2021; pp. 337–360. [Google Scholar]
- Gupta, S.; Deep, K. A hybrid self-adaptive sine cosine algorithm with opposition based learning. Expert Syst. Appl. 2019, 119, 210–230. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A novel hybrid sine cosine algorithm for global optimization and its application to train multilayer perceptrons. Appl. Intell. 2020, 50, 993–1026. [Google Scholar] [CrossRef]
- Alabool, H.M.; Alarabiat, D.; Abualigah, L.; Heidari, A.A. Harris hawks optimization: A comprehensive review of recent variants and applications. Neural Comput. Appl. 2021, 33, 8939–8980. [Google Scholar] [CrossRef]
- Chaib, L.; Choucha, A.; Arif, S.; Zaini, H.G.; El-Fergany, A.; Ghoneim, S.S.M. Robust design of power system stabilizers using improved harris hawk optimizer for interconnected power system. Sustainability 2021, 13, 11776. [Google Scholar] [CrossRef]
- Ekinci, S.; Demiroren, A.; Hekimoglu, B. Parameter optimization of power system stabilizers via kidney-inspired algorithm. Trans. Inst. Meas. Control 2019, 41, 1405–1417. [Google Scholar] [CrossRef]
- Devarapalli, R.; Kumar, V. Power system oscillation damping controller design: A novel approach of integrated HHO-PSO algorithm. Arch. Control Sci. 2021, 31, 553–591. [Google Scholar]
- Ibrahim, N.M.A.; Elnaghi, B.E.; Ibrahim, H.A.; Talaat, H.E.A. Performance assessment of bacterial foraging based power system stabilizer in multi-machine power system. Int. J. Intell. Syst. Appl. 2019, 11, 43. [Google Scholar] [CrossRef] [Green Version]
- Mou, Q.; Ye, H.; Liu, Y. Nonsmooth Optimization-Based WADC Tuning in Large Delayed Cyber-Physical Power System by Interarea Mode Tracking and Gradient Sampling. IEEE Trans. Power Syst. 2019, 34, 668–679. [Google Scholar] [CrossRef]
- Khalilpourazari, S.; Khalilpourazary, S. Optimization of production time in the multi-pass milling process via a Robust Grey Wolf Optimizer. Neural Comput. Appl. 2018, 29, 1321–1336. [Google Scholar] [CrossRef]
- Khalilpourazari, S.; Khalilpourazary, S. SCWOA: An efficient hybrid algorithm for parameter optimization of multi-pass milling process. J. Ind. Prod. Eng. 2018, 35, 135–147. [Google Scholar] [CrossRef]
- Devarapalli, R.; Bhattacharyya, B.; Sinha, N.K. An intelligent EGWO-SCA-CS algorithm for PSS parameter tuning under system uncertainties. Int. J. Intell. Syst. 2020, 35, 1520–1569. [Google Scholar] [CrossRef]
- Singh, B.; Singh, S. GA-based optimization for integration of DGs, STATCOM and PHEVs in distribution systems. Energy Reports 2019, 5, 84–103. [Google Scholar] [CrossRef]
- Peres, W.; da Costa, N.N. Comparing strategies to damp electromechanical oscillations through STATCOM with multi-band controller. ISA Trans. 2020, 107, 256–269. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Diwania, S.; Singh, R.; Ashfaq, H.; Khetrapal, P.; Singh, S. An intelligent Hybrid Wind–PV farm as a static compensator for overall stability and control of multimachine power system. ISA Trans. 2022, 123, 286–302. [Google Scholar] [CrossRef] [PubMed]
- Prakash, A.; Kumar, K.; Parida, S.K. Energy capacitor system based wide-area damping controller for multiple inter-area modes. IEEE Trans. Ind. Appl. 2022, 58, 1543–1553. [Google Scholar] [CrossRef]
- Rout, B.; Pati, B.B.; Panda, S. Modified SCA algorithm for SSSC damping controller design in power system. ECTI Trans. Electr. Eng. Electron. Commun. 2018, 16, 46–63. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Mao, C.; Zhang, J.; Tian, J.; Yu, M.; Wu, K.; Xiong, H.; Wu, L.; Yu, H. Design and field application of flexible excitation system damping controllers. IEEE Trans. Ind. Electron. 2020, 68, 949–959. [Google Scholar] [CrossRef]
- Kasilingam, G.; Pasupuleti, J.; Bharatiraja, C.; Adedayo, Y. Single machine connected infinite bus system tuning coordination control using biogeography: Based optimization algorithm. FME Trans. 2019, 47, 502–510. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Solar Energy (Gigawatt-Hour (GWh)) | Wind Energy (Gigawatt-Hour (GWh)) | Gross Total Electricity Generated from All Sources | Percentage of Electricity Generated through Solar and Wind |
|---|---|---|---|---|
| Denmark | 1181 | 16,353 | 27,907 | 62.83% |
| Uruguay | 525.5 | 5437.7 | 13,470.5 | 44.27% |
| Ireland | 0.093 | 4300 | 10,238.317 | 42% |
| Germany | 50,600,000 | 130,963,000 | 558,000,000 | 32.54% |
| United Kingdom | 12,800 | 75610 | 312,760 | 28.27% |
| Portugal | 1269 | 12,067 | 49,342 | 27.03% |
| Greece | 3898 | 9323 | 42,229.90 | 32.48% |
| Spain | 15,273.607 | 54,333.98 | 250,387 | 27.8% |
| Australia | 22,288 | 22,196 | 221,957 | 20.04% |
| Netherlands | 8,056,000 | 15,269,000 | 118,920,000 | 19.61% |
| Honduras | 1044.78 | 707.2028 | 9292.817 | 18.85% |
| Belgium | 4300 | 10,800 | 81,200 | 18.6% |
| Sweden | 805 | 27,589 | 159,635 | 17.79% |
| Damping Scheme | Fundamental Damping Purpose | Limitation |
|---|---|---|
| Virtual synchronous generator | Provides damping over intra-area and inter-area modes of oscillations | Requires a reliable energy storage system for its reliable operation |
| PSS | Provides damping over intra-area (local) modes of oscillations | Efficiency is low over inter-area modes of oscillation |
| FACTS | Provides damping over inter-area modes of oscillations | Efficiency is low against intra-area modes of oscillation |
| Coordination control (PSS+FACTS) | Provides damping over intra-area and inter-area modes of oscillations | Destabilizes the system if the design if there is no proper coordination |
| Artificial Intelligence | Reduces the parameters to be tuned compared with PSS and FACTS and provides damping over intra-area and inter-area oscillation modes | Not easy to implement |
| Definition Type | Equation | Objective |
|---|---|---|
| Singular objective function | } | Minimization |
| ) | Maximization | |
| Minimization | ||
| Multiple objective function | Minimization | |
| ) | Maximization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabo, A.; Kolapo, B.Y.; Odoh, T.E.; Dyari, M.; Abdul Wahab, N.I.; Veerasamy, V. Solar, Wind and Their Hybridization Integration for Multi-Machine Power System Oscillation Controllers Optimization: A Review. Energies 2023, 16, 24. https://doi.org/10.3390/en16010024
Sabo A, Kolapo BY, Odoh TE, Dyari M, Abdul Wahab NI, Veerasamy V. Solar, Wind and Their Hybridization Integration for Multi-Machine Power System Oscillation Controllers Optimization: A Review. Energies. 2023; 16(1):24. https://doi.org/10.3390/en16010024
Chicago/Turabian StyleSabo, Aliyu, Bashir Yunus Kolapo, Theophilus Ebuka Odoh, Musa Dyari, Noor Izzri Abdul Wahab, and Veerapandiyan Veerasamy. 2023. "Solar, Wind and Their Hybridization Integration for Multi-Machine Power System Oscillation Controllers Optimization: A Review" Energies 16, no. 1: 24. https://doi.org/10.3390/en16010024