

Improved Virtual Synchronous Generator Principle for Better Economic Dispatch and Stability in Grid-Connected Microgrids with Low Noise
Abstract
:1. Introduction
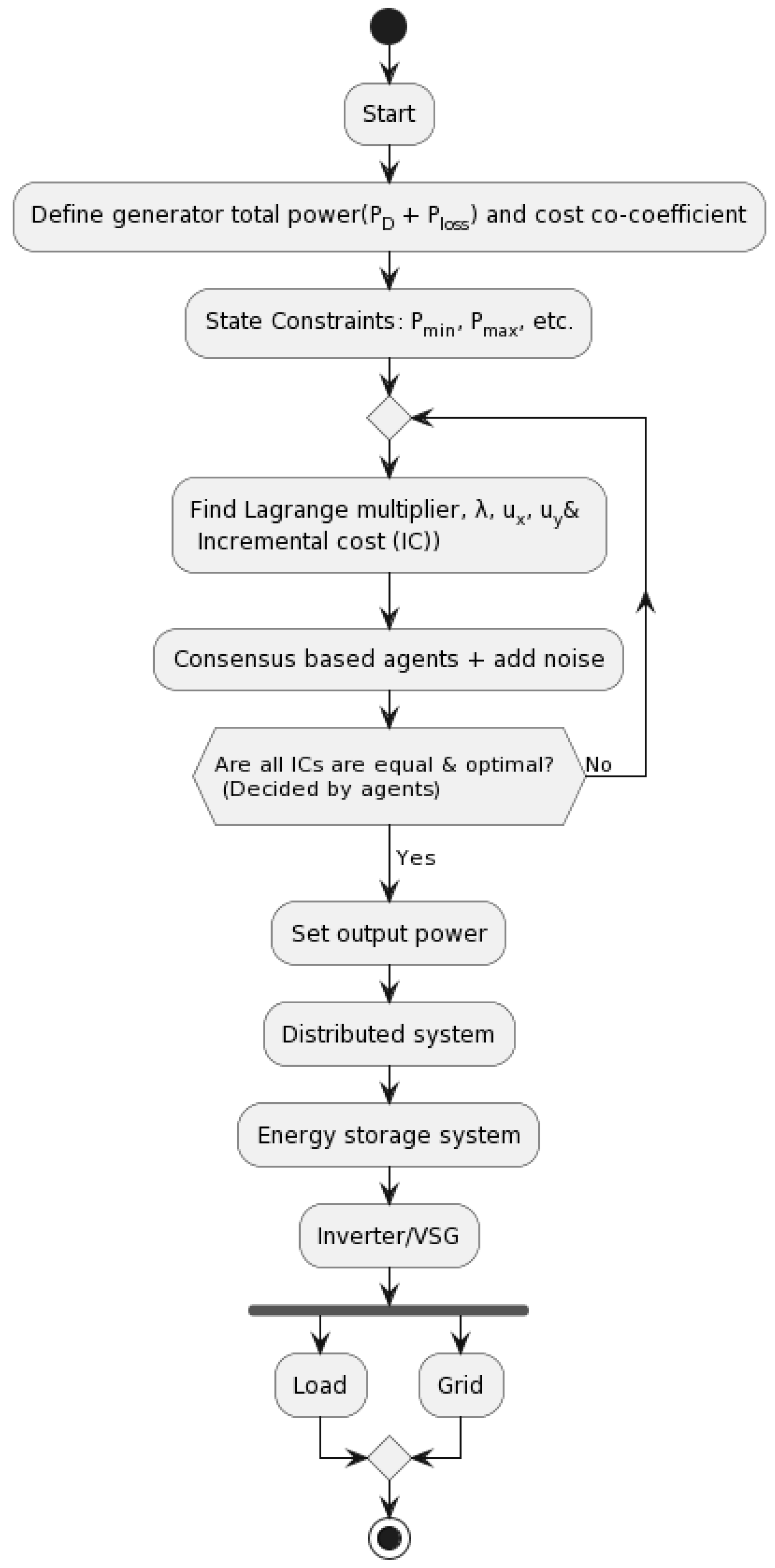
2. Economic Dispatch Formulation
2.1. Lagrange Formulation
- is the generator cost
- , , are the cost coefficients
- is the generator’s total power output.
- = total load; = losses during transmission
- = minimum generation limit of generator i
- = maximum generation limit of generator i.
- = incremental cost
- = optimal incremental cost.
2.2. Particle Swarm Optimization (PSO) Algorithm
- k = number of iterations
- Ξ = inertia weight factor
- m1, m2 = acceleration constant
- r1, r2 = random number within the range [0, 1]
3. Microgrid Structure
4. Economic Dispatch with Consensus-Based Approach for Noise-Less Communication [19]
- Z[k] = incremental cost of a unit at the kth iteration,
- Z[k + 1] = incremental cost of a unit at the (k + 1)th iteration,
- µ[k] = recursive step size,
- N = r × r diagonal matrix with link control gain as its diagonal elements,
- H1 and H2 = r × n matrix where the rows are elementary vectors,
- N[k] = communication link noise.
5. Virtual Synchronous Generator (VSG)
- = three-phase reference voltage
- = electromotive force
- = voltage drop caused by virtual synchronous impedance.
- Δω = angular velocity difference
- Xm = mechanical power
- Xe = electromagnetic power
- J = moment of inertia
- D = damping co-efficient
- ω = angular velocity
- ωR = rated angular velocity
- kSGU = SG voltage-reactive coefficient
- USGref = reference values of voltage
- QSGref = reference values of reactive power
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, D.; Cai, Y. Taguchi method for solving the economic dispatch problem with nonsmooth cost functions. IEEE Trans. Power Syst. 2005, 20, 2006–2014. [Google Scholar] [CrossRef]
- Park, J.B.; Jeong, Y.W.; Shin, J.R.; Lee, K. An improved particle swarm optimization for nonconvex economic dispatch problems. IEEE Trans. Power Syst. 2010, 25, 156–166. [Google Scholar] [CrossRef]
- Guo, T.; Henwood, M.; Van Ooijen, M. An algorithm for combined heat and power economic dispatch. IEEE Trans. Power Syst. 1996, 11, 1778–1784. [Google Scholar] [CrossRef]
- Fan, J.Y.; Zhang, L. Real-time economic dispatch with line flow and emission constraints using quadratic programming. IEEE Trans. Power Syst. 1998, 13, 320–325. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-dalys. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control Syst. Mag. 2007, 27, 71–82. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2005, 50, 169–182. [Google Scholar]
- Moreau, L. Stability of multiagent systems with time-dependent communication links. IEEE Trans. Autom. Control 2005, 50, 169–182. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, W.; Liu, W.; Yang, Q. Fully distributed social welfare optimization with line flow constraint consideration. IEEE Trans. Ind. Informat. 2015, 11, 1532–1540. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Ojha, U.; Zhang, Z.; Chow, M.-Y. Incremental welfare consensus algorithm for cooperative distributed generation/demand response in smart grid. IEEE Trans. Smart Grid 2014, 5, 2836–2845. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z. Distributed optimal resource management based on the consensus algorithm in a microgrid. IEEE Trans. Ind. Electron 2015, 62, 2584–2592. [Google Scholar] [CrossRef]
- Xu, Y.; Yang, Z.; Gu, W.; Li, M.; Deng, Z. Robust real-time distributed optimal control based energy management in a smart grid. IEEE Trans. Smart Grid 2017, 8, 1568–1579. [Google Scholar] [CrossRef]
- Zheng, W.; Wu, W.; Zhang, B.; Lin, C. Distributed optimal residential demand response considering operational constraints of unbalanced distribution networks. IET Gener. Transm. Distrib. 2018, 12, 1970–1979. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Li, Z. Distributed optimal energy scheduling based on a novel PD pricing strategy in smart grid. IET Gener. Transm. Distrib. 2017, 11, 2075–2084. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Zhang, Y.; Chow, M.-Y. Consensus-based distributed scheduling for cooperative operation of distributed energy resources and storage devices in smart grids. IET Gener. Transm. Distrib. 2016, 10, 1268–1277. [Google Scholar] [CrossRef]
- Jordehi, A.R.; Javadi, M.S.; Catalao, J.P.S. Dynamic Economic Load Dispatch in Isolated Microgrids with Particle Swarm Optimisation considering Demand Response. In Proceedings of the 55th International Universities Power Engineering Conference (UPEC), Turin, Italy, 1–4 September 2020; pp. 1–4. [Google Scholar]
- Imtiaz, B.; Cui, Y.; Zafar, I. Economic Dispatch of Microgrid Incorporating Demand Response Using Dragonfly Algorithm. In Proceedings of the 2021 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 27–28 August 2021; pp. 59–68. [Google Scholar]
- Singh, J.; Poddar, S.; Ramalingam, S.P.; Shanmugam, P.K.; Kalam, A. Investigation on Dynamic Economic Dispatch Problem of Microgrid Using Cuckoo Search Algorithm—Grid Connected and Island Mode. In Proceedings of the 2019 IEEE Region 10 Conference (TENCON), Kochi, India, 17–20 October 2019; pp. 1886–1891. [Google Scholar]
- Luo, N.; Liu, J.; Zhang, P. Optimal Dispatching of Active Distribution Network based on Improved Genetic Algorithm. In Proceedings of the 2022 44th International Conference on Frontiers Technology of Information and Computer (ICFTIC), Qingdao, China, 2–4 December 2022; pp. 551–554. [Google Scholar]
- Abhinav, S.; Schizas, I.D.; Lewis, F.L.; Davoudi, A. Distributed noise-resilient networked synchrony of active distribution systems. IEEE Trans. Smart Grid 2018, 9, 836–846. [Google Scholar] [CrossRef]
- Abhinav, S.; Schizas, I.D.; Ferrese, F.; Davoudi, A. Optimization based Ac microgrid synchronization. IEEE Trans. Ind. Informat. 2017, 13, 2339–2349. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Baghaee, H.R.; Sadati, N.; Guerrero, J.M. Distributed noise-resilient secondary voltage and frequency control for islanded microgrids. IEEE Trans. Smart Grid 2018, 10, 3780–3790. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Chen, M.; Zhao, X.; Guerrero, J.M.; Wang, L.Y. Distributed Noise-resilient economic dispatch strategy for islanded microgrids. IET Gener. Transm. Distrib. 2019, 13, 3029–3039. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed control techniques in microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Molzahn, D.K.; Dorfler, F.; Sandberg, H.; Low, S.H.; Chakrabarti, S.; Baldick, R.; Lavaei, J. A survey of distributed optimization and control algorithms for electric power systems. IEEE Trans. Smart Grid 2017, 8, 2941–2962. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Hong, L.; Coelho, E.A.A.; Guerrero, J.M. MAS-based distributed coordinated control and optimization in kicrogrid and microgrid clusters: A comprehensive review. IEEE Trans. Power Electron 2018, 33, 6488–6508. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Wu, W.; Sun, H.; Wang, L. Fully distributed multi-area dynamic economicdispatch method with second-order convergence for active distribution networks. IET Gener. Transm. Distrib. 2017, 11, 3955–3965. [Google Scholar] [CrossRef]
- Kouveliotis-Lysikatos, I.; Hatziargyriou, N. Fully distributed economic dispatch of distributed generators in active distribution networks considering losses. IET Gener. Transm. Distrib. 2017, 11, 627–636. [Google Scholar] [CrossRef]
- Zheng, W.; Wu, W.; Zhang, B.; Li, Z.; Liu, Y. Fully distributed multi-area economic dispatch method for active distribution networks. IET Gener. Transm. Distrib. 2015, 9, 1341–1351. [Google Scholar] [CrossRef]
- Tu, Y.; Su, J.H.; Du, Y.; Yang, X.Z.; Xu, H.D. Analysis of microgrid inverter paralleling system based on virtual oscillator. Electr. Power Autom. Equip. 2017, 37, 24–30. [Google Scholar]
- Cheng, Q.M.; Gao, J.; Cheng, Y.M. An inverter control method suitable for islanding operation. Power Syst. Technol. 2018, 42, 203–209. [Google Scholar]
- Xu, Y.Q.; Ma, H.J. Inverter parallel operation technology based on improved droop control. Power Syst. Prot. Control 2015, 43, 103–107. [Google Scholar]
- Lü, Z.Y.; Wu, Z.J.; Dou, X.B. Adaptive discrete droop control of isolated DC microgrid based on discrete consistency. Proc. CSEE 2015, 35, 4397–4407. [Google Scholar]
- Chen, W.; Li, T. Distributed Economic Dispatch for Energy Internet based on Miultiagent Consensus Control. IEEE Trans. Autom. Control. 2021, 66, 137–152. [Google Scholar] [CrossRef] [Green Version]
- Meng, J.; Shi, X.; Wang, Y.; Fu, C. A virtual synchronous generator control strategy for distributed generation. In Proceedings of the 2014 China International Conference on Electricity Distribution (CICED), Shenzhen, China, 23–26 September 2014; pp. 495–498. [Google Scholar]
- Singh, S.; Gao, D.W. Noiseless Consensus based Algorithm for Economic Dispatch problme in Grid-connected Microgrids to enahnce Stability among Distributed Generators. In Proceedings of the 2019 North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019; pp. 1–5. [Google Scholar]
- Li, H.; Gu, R.-Z. Research on Grid-coonected Control and Simulation of Microgrid Inverter based on VSG. In Proceedings of the 2018 China International Conference on Electricity Distribution (CICED), Tianjin, China, 17–19 September 2018. [Google Scholar]
- Mišković, M.; Mirošević, M.; Milković, M. Analysis of synchronous generator angular stability depending on the choice of the excitation system. Angew. Chem. 2009, 39, 4555. [Google Scholar] [CrossRef]
- Wang, K.; Qi, C.; Huang, X.; Li, G. Large disturbance stability evaluation of interconnected multi-inverter power grids with VSG model. J. Eng. 2017, 2017, 2483–2488. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Cmin (kW) | Cmax (kW) | x | y | z |
|---|---|---|---|---|---|
| 1 | 4 | 18 | 0.070 | 2.15 | 56 |
| 2 | 8 | 40 | 0.080 | 1.15 | 50 |
| 3 | 5 | 25 | 0.070 | 3.3 | 41 |
| 4 | 5 | 40 | 0.056 | 3.4 | 36 |
| Components | Values |
|---|---|
| L1 | 6 mH |
| L2 | 1.5 mH |
| C | 6 micro-F |
| J | 0.15 kg·m2 |
| Kp, kU | 800 kW/Hz, 0.8 Hz/kVar |
| PWM freq | 25 kHz |
| P at constant load | 10 kW |
| Q at constant load | 8 kVar |
| ra | 0.05 ohm |
| Xd | 0.05 H |
| P variable | 5 kW |
| Q variable | 3 kVar |
| Noise Variance | Lagrange Method | PSO Algorithm |
|---|---|---|
| No noise | 38.21 s | 27.45 s |
| 0.2 variance | 48 s | 38.20 s |
| 0.5 variance | 52.57 s | 40.19 s |
| 0.8 variance | 90 s | 51.85 s |
| Method/Algorithm | Frequency (Hz) | Max. Power (kW) |
|---|---|---|
| Lagrange | 0.45 s | 0.30 s |
| PSO | 0.20 s | 0.15 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, S.; Gao, D.W. Improved Virtual Synchronous Generator Principle for Better Economic Dispatch and Stability in Grid-Connected Microgrids with Low Noise. Energies 2023, 16, 4670. https://doi.org/10.3390/en16124670
Singh S, Gao DW. Improved Virtual Synchronous Generator Principle for Better Economic Dispatch and Stability in Grid-Connected Microgrids with Low Noise. Energies. 2023; 16(12):4670. https://doi.org/10.3390/en16124670
Chicago/Turabian StyleSingh, Shruti, and David Wenzhong Gao. 2023. "Improved Virtual Synchronous Generator Principle for Better Economic Dispatch and Stability in Grid-Connected Microgrids with Low Noise" Energies 16, no. 12: 4670. https://doi.org/10.3390/en16124670