
Large-Signal Impedance Modeling and Stability Analysis of a Grid-Connected Inverter Considering the Influence of a Limiter in Different Control Links
 , ,
, ,
Abstract
:1. Introduction
2. Structure and Control of Grid-Connected Inverter System
3. Large-Signal Impedance Modeling of Grid-Connected Inverter Considering the Influence of Limiter in Different Control Links
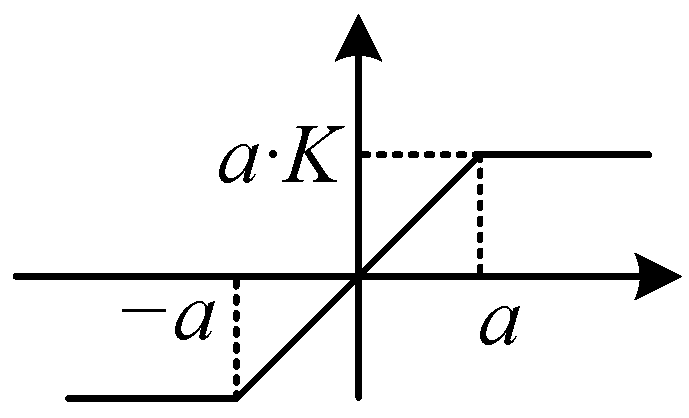
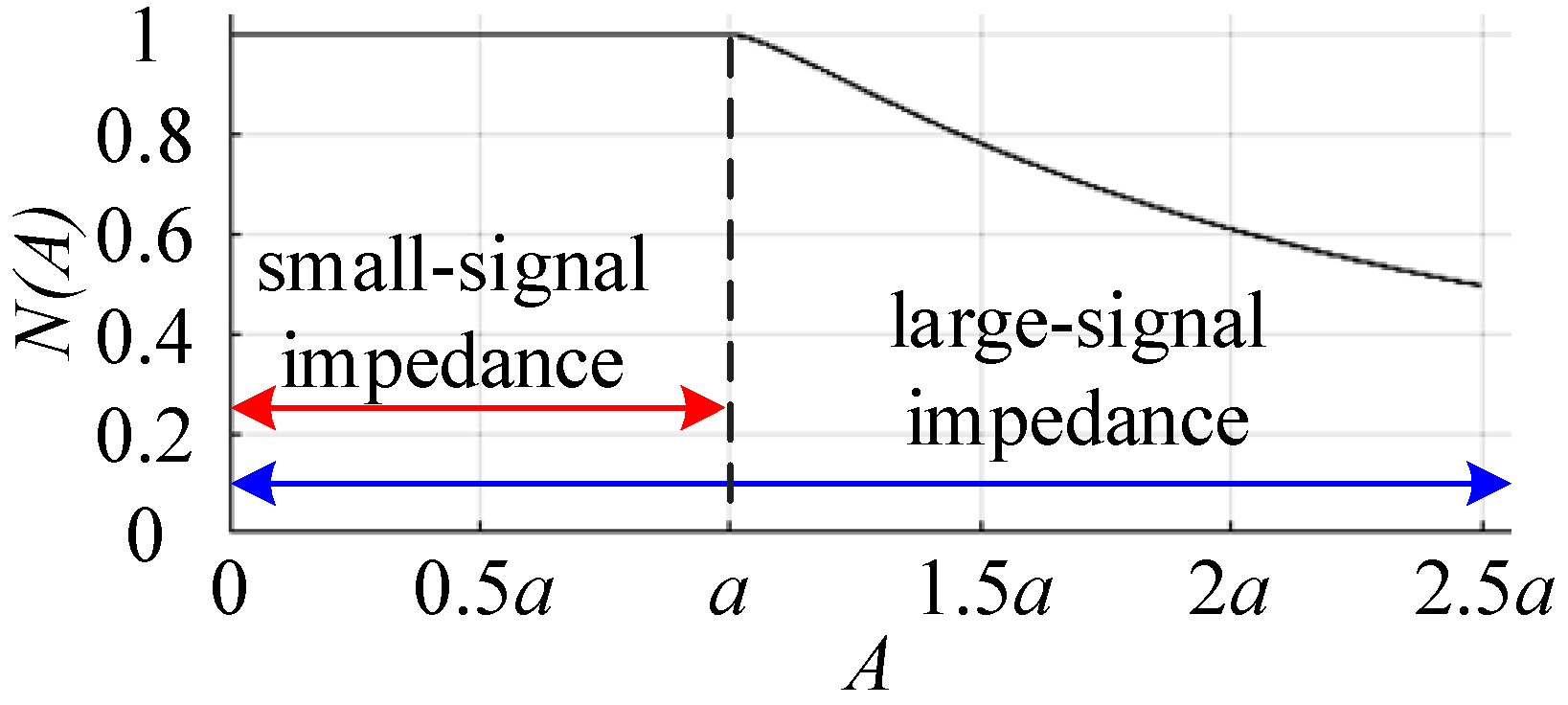
3.1. Limiter Description Function
3.2. Small-Signal Impedance Model of Grid-Connected Inverter
3.3. Large-Signal Impedance Model of Grid-Connected Inverter Considering the Influence of Limiter in PLL
3.4. Large-Signal Impedance Model of Grid-Connected Inverter Considering the Influence of Limiter in the Current Loop
3.5. Large-Signal Impedance Model of Grid-Connected Inverter Considering the Effect of Limiter in PWM
4. Simulation Verification
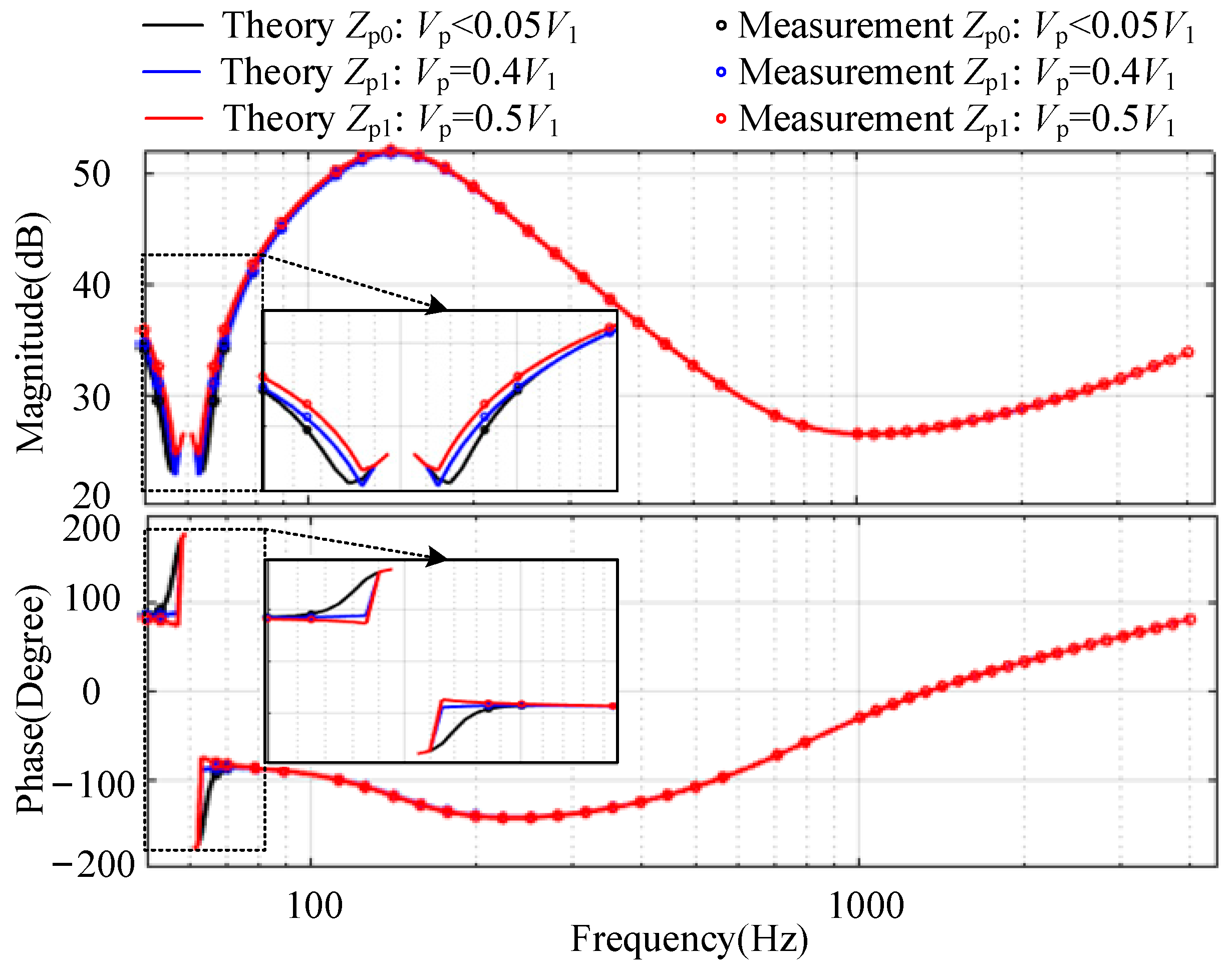
4.1. Large-Signal Impedance Response of Grid-Connected Inverter Considering the Influence of Limiter in PLL
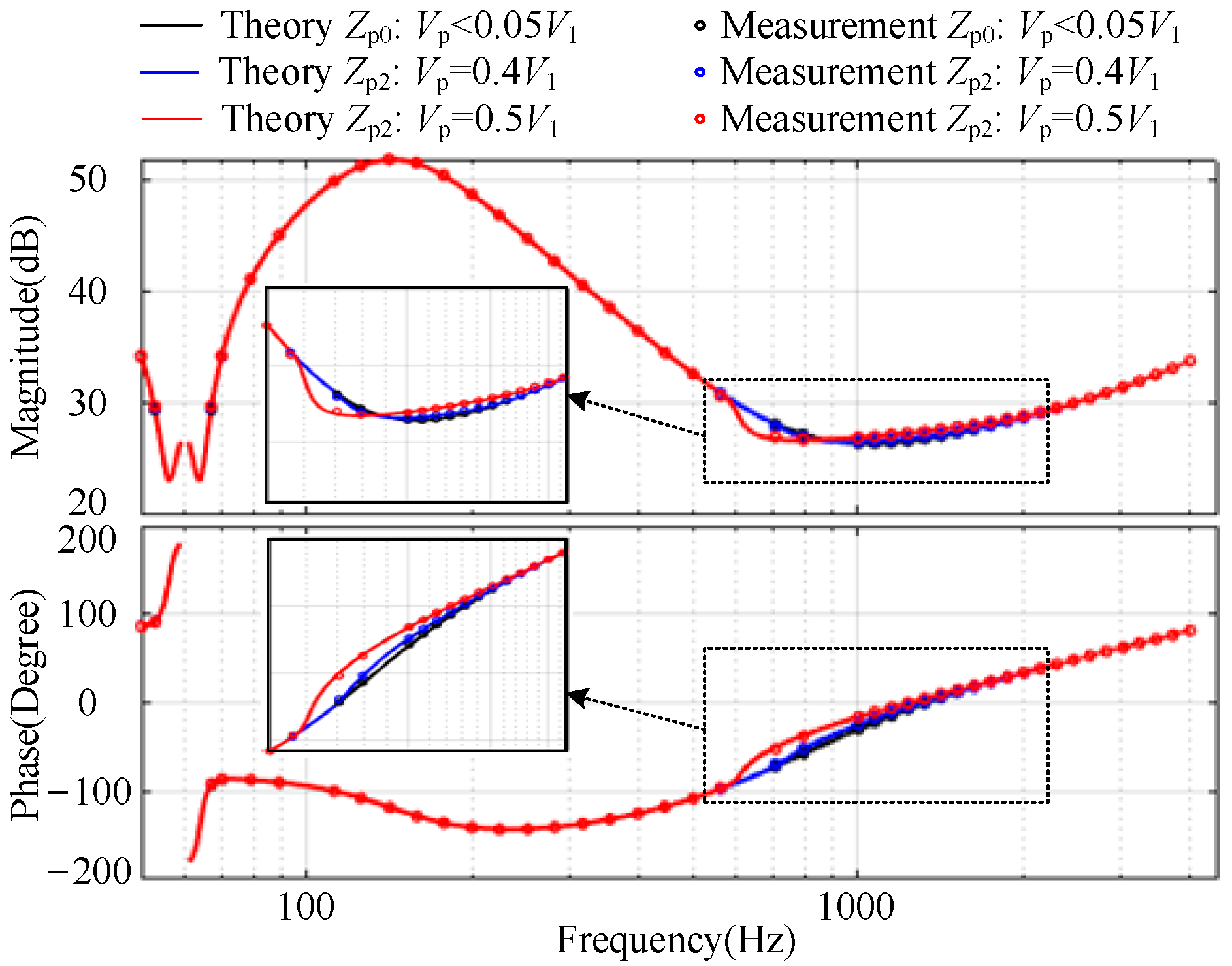
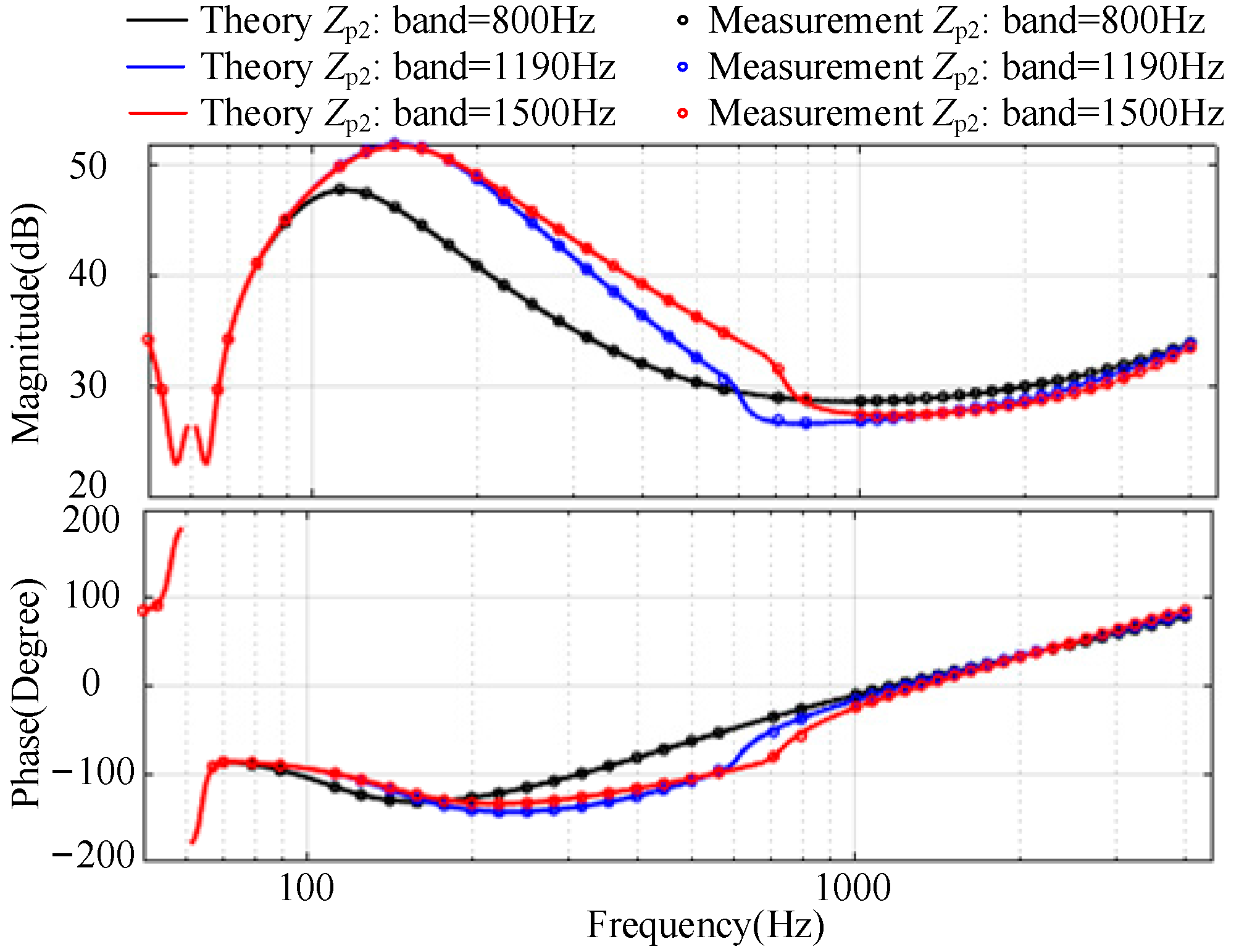
4.2. Large-Signal Impedance Response of Grid-Connected Inverter Considering the Influence of Limiter in the Current Loop
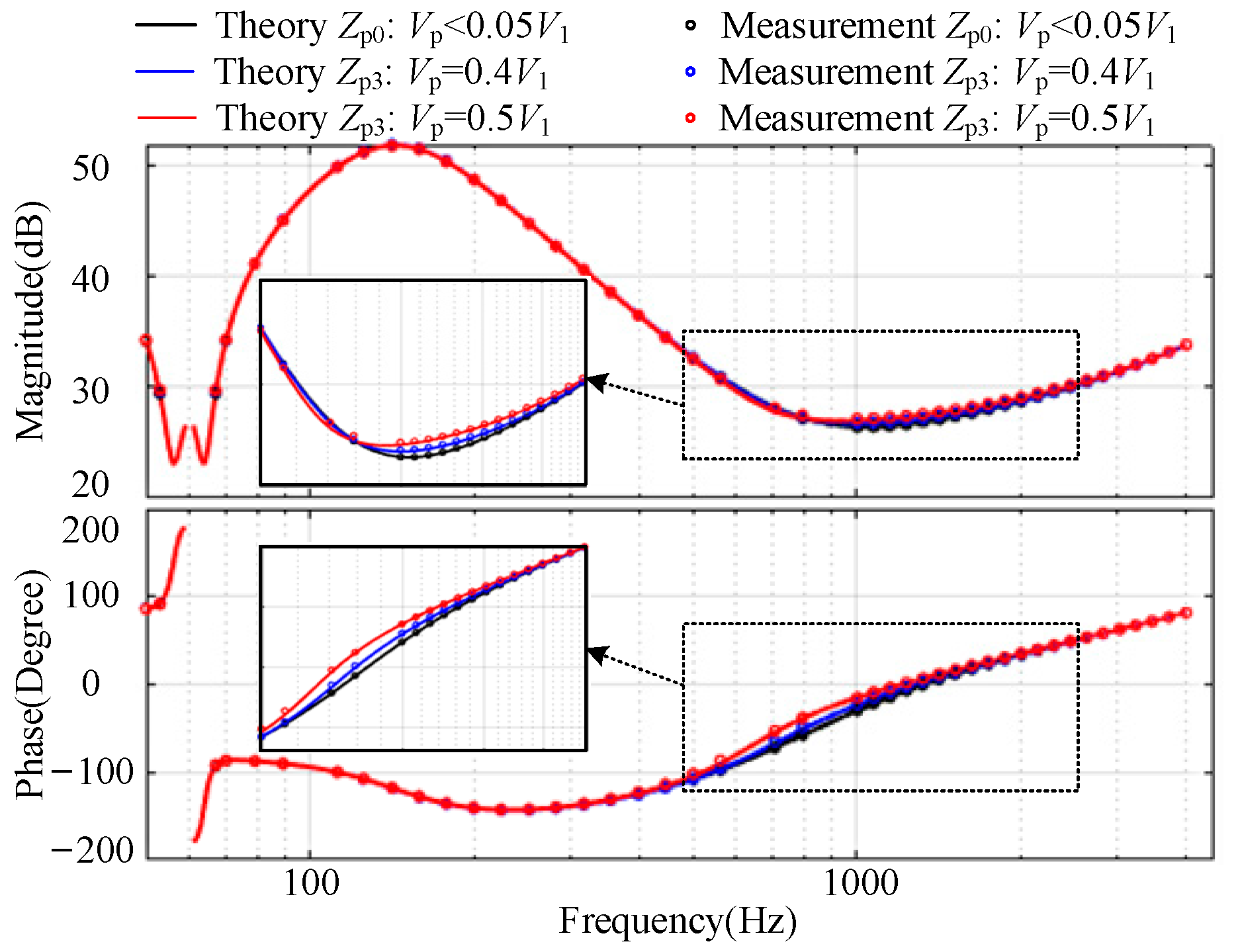
4.3. Large-Signal Impedance Response of Grid-Connected Inverter Considering the Influence of Limiter in PWM
4.4. Large-Signal Impedance Comparison of Grid-Connected Inverter Considering the Influence of Limiter in Different Control Links
5. System Stability Analysis Based on the Large-Signal Impedance Model
- Case 1
- Case 2
6. Conclusions
- (1)
- Based on the existing large-signal impedance model considering the limiter in PWM, the large-signal impedance models considering the limiter in the current control loop and the limiter in the PLL of the grid-connected inverter are developed for the first time. Their theoretical large-signal impedance characteristics are all consistent with the measured large-signal impedance characteristics;
- (2)
- The impedance characteristics of three large-signal impedance models and the influence of different limiters on the output impedance characteristics of grid-connected inverters are compared and analyzed. The limiter in the PLL influences the large-signal impedance characteristics of the grid-connected inverter around the sub/super-synchronous frequency band, and the limiter in the current loop and the limiter in the PWM influence those around the middle and high frequency band;
- (3)
- The large-signal impedance of the inverter taking into account the PLL limiter changes dramatically around the sub-super synchronous frequency range when the PLL bandwidth is increased. The amplitude and phase of the large-signal impedance of the inverter taking into account the limiter in the current loop fluctuate dramatically in the middle frequency band when the current loop’s bandwidth is increased. The PLL bandwidth has a smaller impact on Zp1 than the current-loop bandwidth has on Zp2;
- (4)
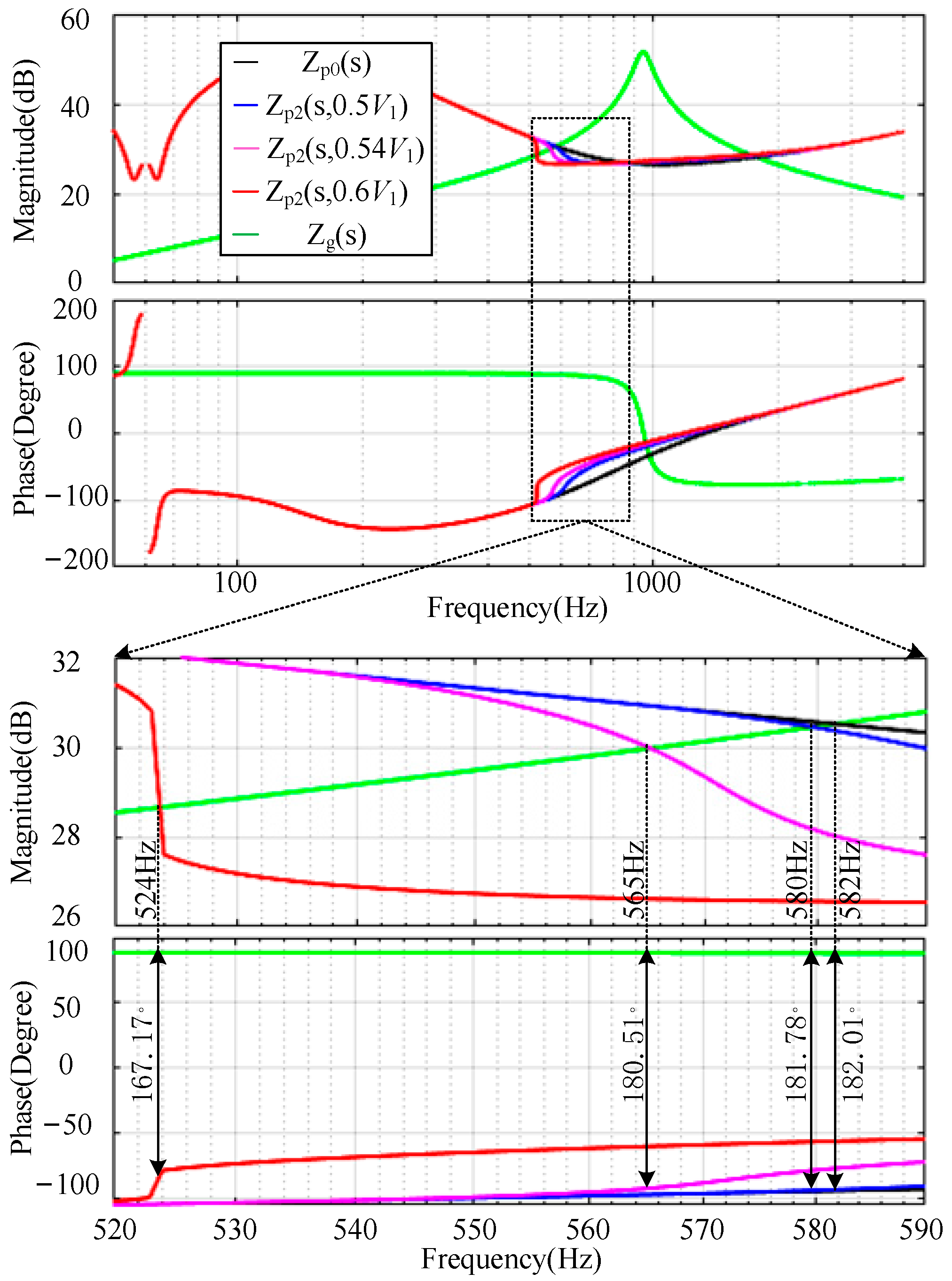
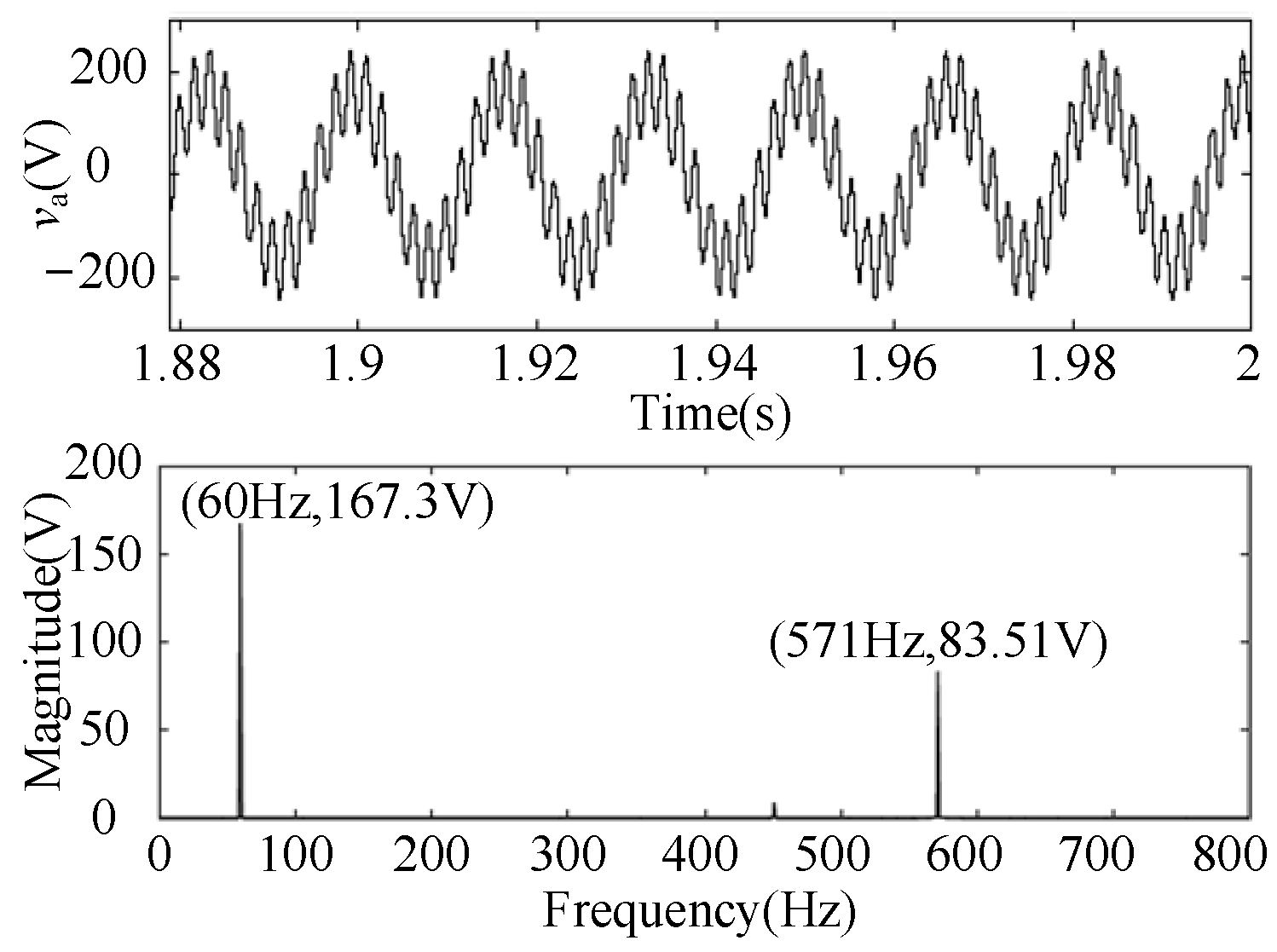
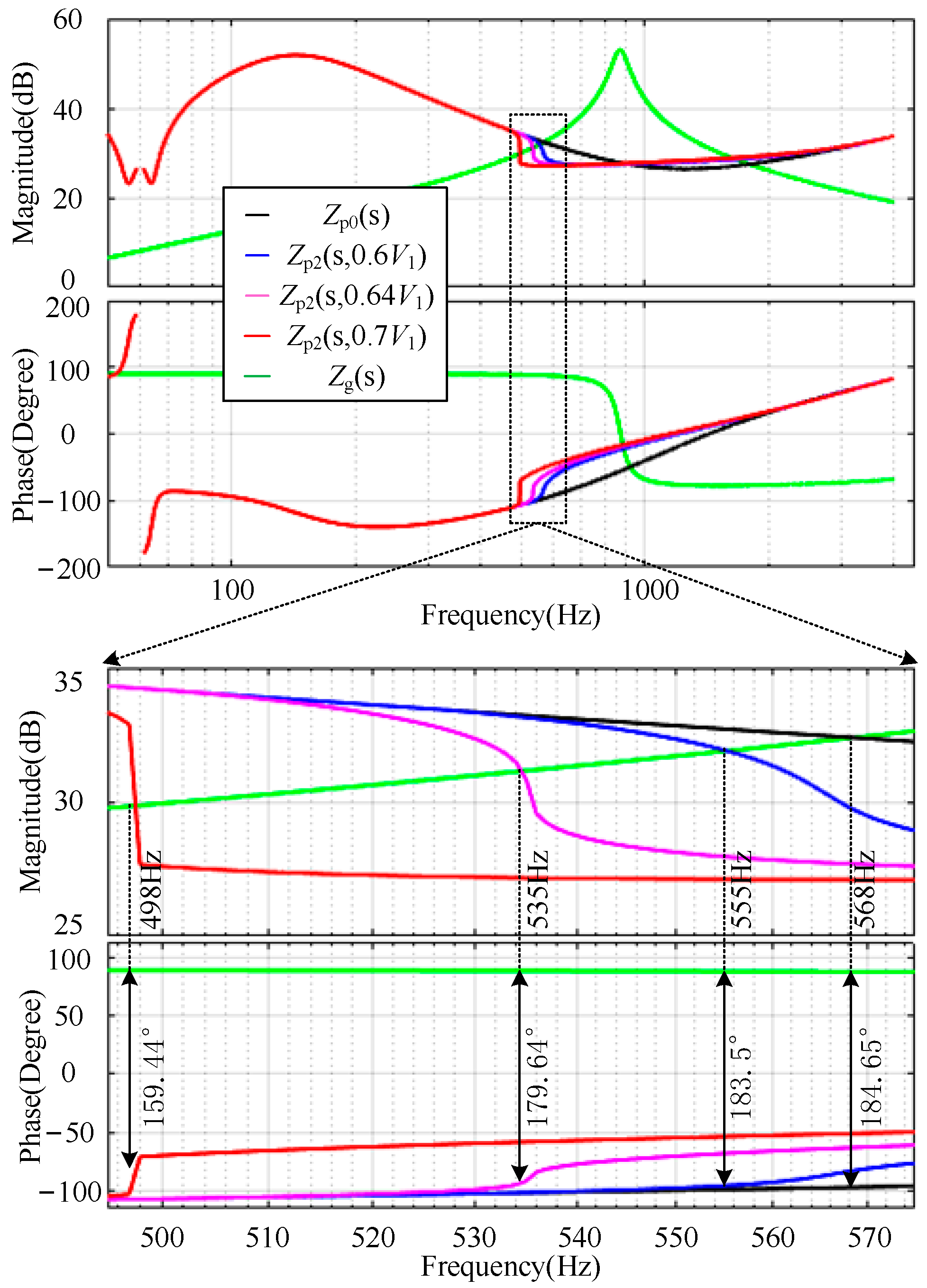
- Due to the influence of the limiter in the current loop, with the increase in the system disturbance amplitude, the phase difference at the intersection of the large-signal impedance’s amplitude and the grid impedance’s amplitude decreases gradually, and the system stability is enhanced. When the phase difference is 180°, the system is critically stable, and the oscillation frequency and amplitude of the real system are essentially compatible with the disturbance frequency and amplitude;
- (5)
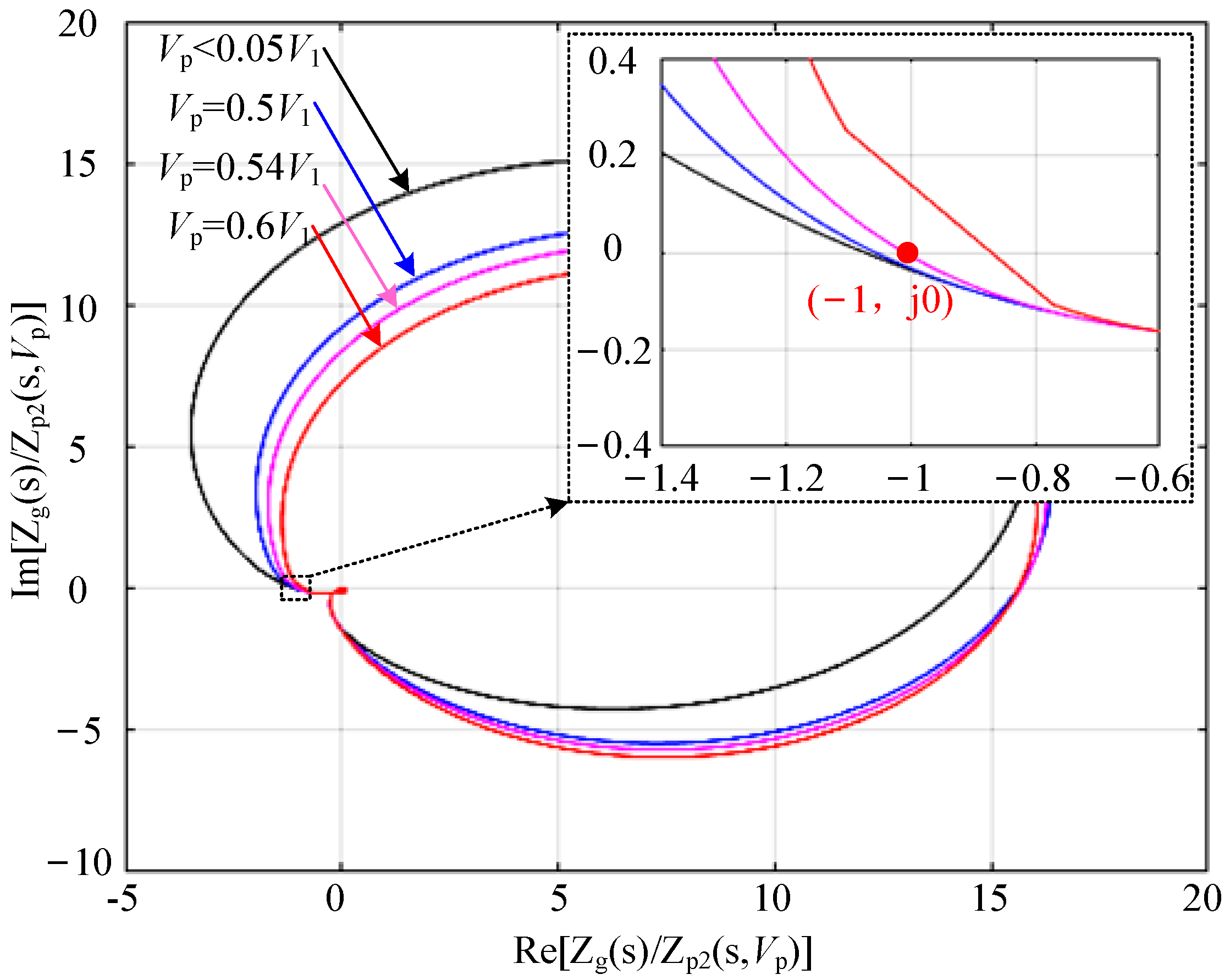
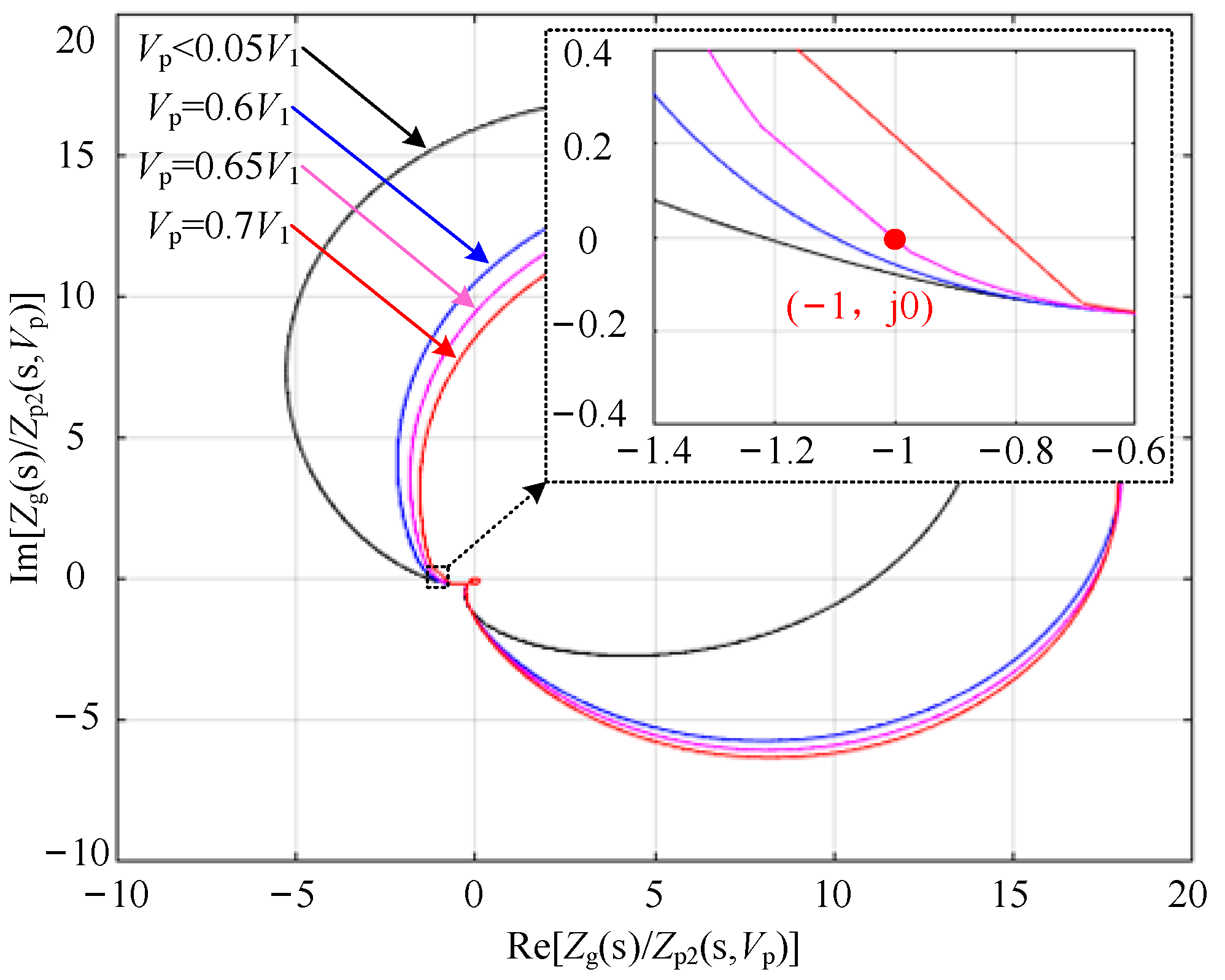
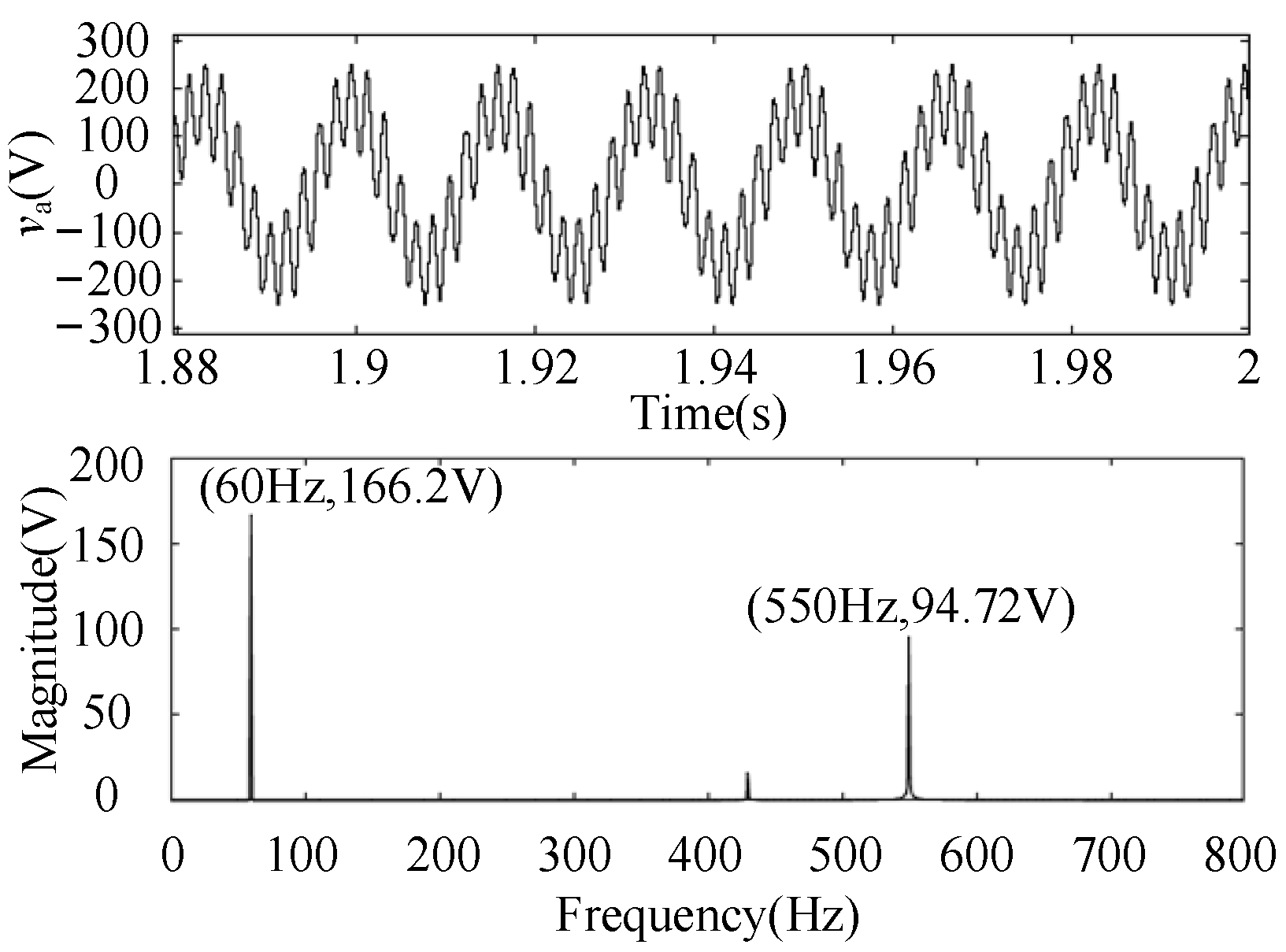
- As the amplitude of the system disturbance increases, the Nyquist curve of Zg(s)/Zp2(s, Vp) considering the limiter in the current loop gradually moves away from the point (−1,j0), and the stability margin of the system increases. When the Nyquist curve just crosses the point (−1,j0), the system is critically stable, and the disturbance amplitude is basically consistent with the oscillation amplitude of the actual system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, N.; Tang, J.; Shan, H.S.; Jia, H.Z.; Peng, R.L.; Zuo, L. Efficient Power Conversion Using a PV-PCM-TE System Based on a Long Time Delay Phase Change With Concentrating Heat. IEEE Trans. Power Electron. 2023, 38, 10729–10738. [Google Scholar] [CrossRef]
- Wen, B.; Dong, D.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Impedance-Based Analysis of Grid-Synchronization Stability for Three-Phase Paralleled Converters. IEEE Trans. Power Electron. 2016, 31, 26–38. [Google Scholar] [CrossRef]
- Alawasa, K.M.; Mohamed, Y.A. A Simple Approach to Damp SSR in Series-Compensated Systems via Reshaping the Output Admittance of a Nearby VSC-Based System. IEEE Trans. Ind. Electron. 2015, 62, 2673–2682. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; He, J.; Xu, T.; Yu, Z.; Wang, C.; Zhang, C. Subsynchronous Interaction Between Direct-Drive PMSG Based Wind Farms and Weak AC Networks. IEEE Trans. Power Syst. 2017, 32, 4708–4720. [Google Scholar] [CrossRef]
- Xu, Y.; Gu, Z.; Sun, K. Characterization of Subsynchronous Oscillation with Wind Farms Using Describing Function and Generalized Nyquist Criterion. IEEE Trans. Power Syst. 2020, 35, 2783–2793. [Google Scholar] [CrossRef]
- Shah, S.; Koralewicz, P.; Gevorgian, V.; Liu, H.; Fu, J. Impedance Methods for Analyzing Stability Impacts of Inverter-Based Resources: Stability Analysis Tools for Modern Power Systems. IEEE Electrif. Mag. 2021, 9, 53–65. [Google Scholar] [CrossRef]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Yu, L.; Xu, L.; Zhu, J.; Li, R. Impedance Modelling and Stability Analysis of Diode-Rectifier based HVDC Connected Offshore Wind Farms. IEEE Trans. Power Deliv. 2022, 37, 591–602. [Google Scholar] [CrossRef]
- Guo, J.; Chen, Y.; Wang, L.; Wu, W.; Wang, X.; Shuai, Z.; Guerrero, J.M. Impedance Analysis and Stabilization of Virtual Synchronous Generators With Different DC-Link Voltage Controllers Under Weak Grid. IEEE Trans. Power Electron. 2021, 36, 11397–11408. [Google Scholar] [CrossRef]
- Golestan, S.; Ebrahimzadeh, E.; Wen, B.; Guerrero, J.M.; Vasquez, J.C. dq-Frame Impedance Modeling of Three-Phase Grid-Tied Voltage Source Converters Equipped with Advanced PLLs. IEEE Trans. Power Electron. 2021, 36, 3524–3539. [Google Scholar] [CrossRef]
- Guo, H. Sequence-Impedance Modeling of Voltage Source Converter Interconnection under Asymmetrical Grid Fault Conditions. IEEE Trans. Ind. Electron. 2021, 68, 1332–1341. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Z.; Wu, S.; Li, Z. Input Impedance Modeling and Verification of Single-Phase Voltage Source Converters Based on Harmonic Linearization. IEEE Trans. Power Electron. 2019, 34, 8544–8554. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, X.; Chen, Y.; Zhou, L.; Wang, L.; Wu, W. Sequence Impedance Modeling and Stability Analysis for Load Converters With Inertial Support. IEEE Trans. Power Electron. 2020, 35, 13031–13041. [Google Scholar] [CrossRef]
- Xu, L.; Xin, H.; Huang, L.; Yuan, H.; Ju, P.; Wu, D. Symmetric Admittance Modeling for Stability Analysis of Grid-Connected Converters. IEEE Trans. Energy Convers. 2020, 35, 434–444. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Y.; Wu, W.; Liao, S.; Wang, Z.; Luo, A.; Aziz, S.; Guerrero, J.M. Complex Circuit Modeling Methodology and Its Application to Depict Multifrequency Coupling Effect of Asymmetric Grid-Following Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 1203–1218. [Google Scholar] [CrossRef]
- Shah, S.; Parsa, L. Impedance-Based Prediction of Distortions Generated by Resonance in Grid-Connected Converters. IEEE Trans. Energy Convers. 2019, 34, 1264–1275. [Google Scholar] [CrossRef]
- Li, Y.; Yang, J.; Wang, H.; Ge, W.; Ma, Y. Leveraging Hybrid Filter for Improving Quasi-Type-1 Phase Locked Loop Targeting Fast Transient Response. Energies 2018, 11, 2472. [Google Scholar] [CrossRef]
- Zhang, Z.; Schuerhuber, R. Impact of Reactive Current and Phase-Locked Loop on Converters in Grid Faults. Energies 2023, 16, 3122. [Google Scholar] [CrossRef]
- Quan, X.; Lin, X.; Zheng, Y.; Kang, Y. Transient Stability Analysis of Grid-Connected Converter Driven by Imbalance Power under Non-Severe Remote Voltage Sag. Energies 2021, 14, 1737. [Google Scholar] [CrossRef]
- Shah, S.; Parsa, L. Large-Signal Impedance for the Analysis of Sustained Resonance in Grid-Connected Converters. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Shah, S.; Koralewicz, P.; Gevorgian, V.; Wallen, R.; Jha, K.; Mashtare, D.; Burra, R.; Parsa, L. Large-Signal Impedance-Based Modeling and Mitigation of Resonance of Converter-Grid Systems. IEEE Trans. Sustain. Energy 2019, 10, 1439–1449. [Google Scholar] [CrossRef]
- Wu, T.; Jiang, Q. Nonlinear Impedance Modeling of Grid-tied Converters Governed by PWM Saturation. In Proceedings of the 2021 IEEE 2nd China International Youth Conference on Electrical Engineering (CIYCEE), Chengdu, China, 15–17 December 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Wu, T.; Xie, X.; Jiang, Q.; Shen, Z. Impedance Modelling of Grid-Connected Voltage-Source Converters Considering the Saturation Non-linearity. IET Gener. Transm. Distrib. 2020, 14, 4815–4823. [Google Scholar] [CrossRef]
- Xia, Y.; Lv, Z.; Wei, W.; He, H. Large-Signal Stability Analysis and Control for Small-Scale AC Microgrids With Single Storage. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 4809–4820. [Google Scholar] [CrossRef]
- Wu, T.; Jiang, Q.; Shair, J.; Xie, X.; Wang, Y.; Luo, Y.; Mao, H. Quantitative Analysis of Sustained Oscillation Associated with Saturation Non-linearity in a Grid-Connected Voltage Source Converter. IET Renew. Power Gener. 2021, 15, 865–876. [Google Scholar] [CrossRef]
- Welford, G.D. Dual Input Describing Functions; Rep, no. RG-TR-69-16; U.S. Army Missile Command: Redstone Arsenal, AL, USA, 1969. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison | The Small-Signal Impedance | The Large-Signal Impedance |
|---|---|---|
| analyzing the stability of the system | ✓ | ✓ |
| predicting oscillation frequency | ✓ | ✓ |
| considering limiter | ✗ | ✓ |
| describing the impedance change as Vp changes | ✗ | ✓ |
| analyzing the dynamic properties of oscillations | ✗ | ✓ |
| predicting oscillation amplitude | ✗ | ✓ |
| Parameters and Units | Value | Parameters and Units | Value |
|---|---|---|---|
| V1/V | 169.7 | Kp_I | 0.07 |
| f1/Hz | 60 | Ki_I | 142.97 |
| Lg/mH | 0 | Kd | 0.006 |
| Rf/Ω | 3 | f/Hz | 10,000 |
| Cf/μF | 5 | Kf | 1/250 |
| Lf/mH | 4 | Idr/A | 15 |
| Vdc/V | 500 | Iqr/A | 0 |
| Km | 0.5 | imax and −imin | 0.2 |
| Kp_PLL | 0.13 | PLLmax and −PLLmin | 10 |
| Ki_PLL | 4.11 | PWMmax and −PWMmin | 1 |
| Large-Signal Impedance | Zp1 | Zp2 | Zp3 |
|---|---|---|---|
| The frequency component of the limiter input | fp − f1 | fp − f1 | f1 and fp |
| Limiter description function | N(A) | N(A) | NA1(A1,A2) and NA2(A1,A2) |
| Terms that are different from Zp0 | HPLL(s)NPLL(s) | Hi(s)Ni(s) | KmNMP(M1,MP) |
| The range of impedance characteristics affected | Around sub/super-synchronous frequency band | Around middle and high frequency band | Around middle and high frequency band |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, X.; Wu, J.; Liu, X.; Chen, Y.; Xie, Z.; Xue, F.; Liu, Y.; Luo, C. Large-Signal Impedance Modeling and Stability Analysis of a Grid-Connected Inverter Considering the Influence of a Limiter in Different Control Links. Energies 2023, 16, 6227. https://doi.org/10.3390/en16176227
Cui X, Wu J, Liu X, Chen Y, Xie Z, Xue F, Liu Y, Luo C. Large-Signal Impedance Modeling and Stability Analysis of a Grid-Connected Inverter Considering the Influence of a Limiter in Different Control Links. Energies. 2023; 16(17):6227. https://doi.org/10.3390/en16176227
Chicago/Turabian StyleCui, Xiaodan, Jialong Wu, Xiaoke Liu, Yandong Chen, Zhiwei Xie, Feng Xue, Yucheng Liu, and Cong Luo. 2023. "Large-Signal Impedance Modeling and Stability Analysis of a Grid-Connected Inverter Considering the Influence of a Limiter in Different Control Links" Energies 16, no. 17: 6227. https://doi.org/10.3390/en16176227