


Sliding Mode Control of Buck DC–DC Converter with LC Input Filter

Abstract
:1. Introduction
2. Methodology
2.1. Sliding Mode Control Concept
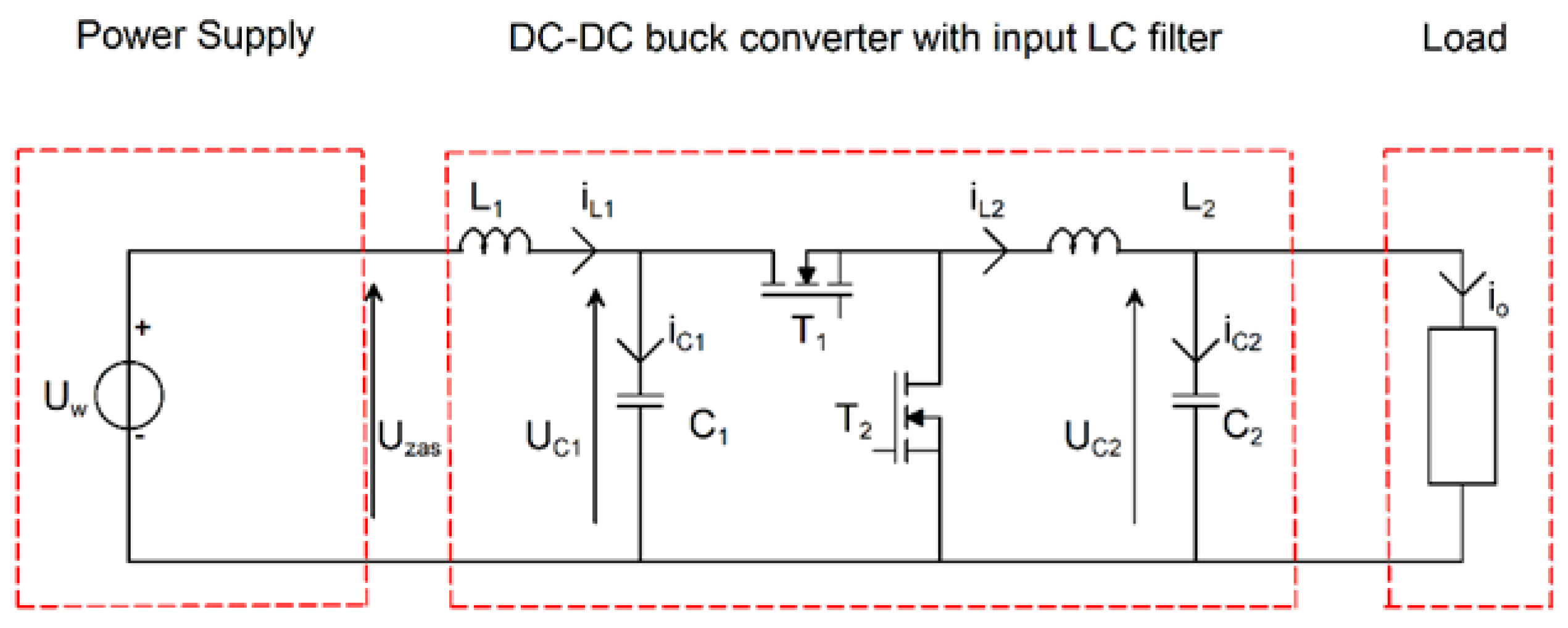
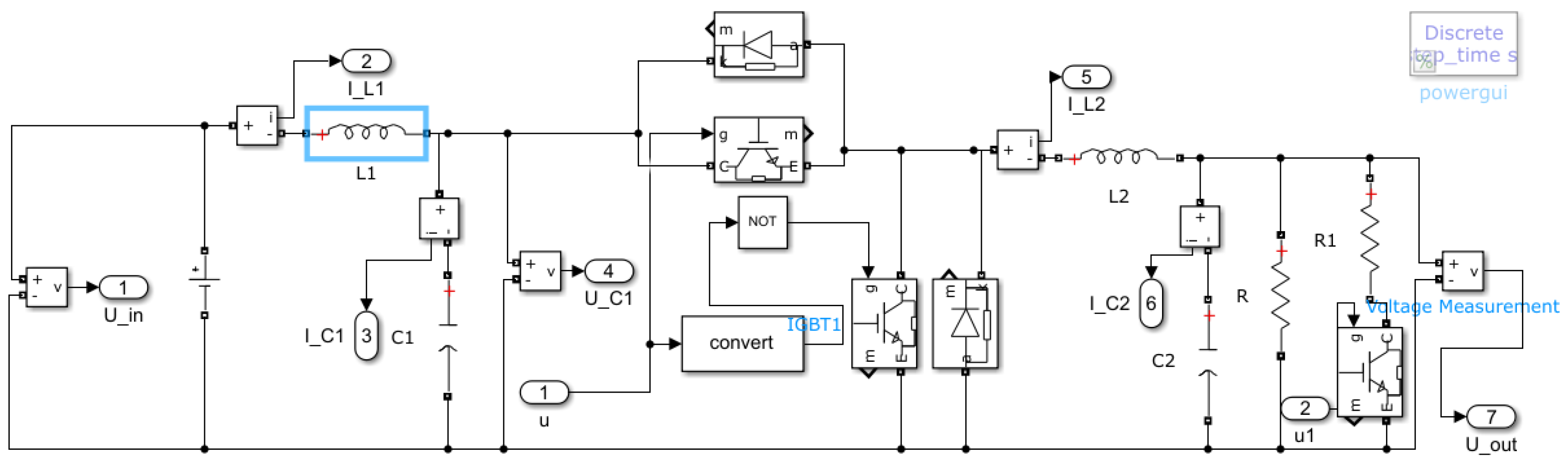
2.2. Simualtion Model of DC–DC Converter with Input LC Filter
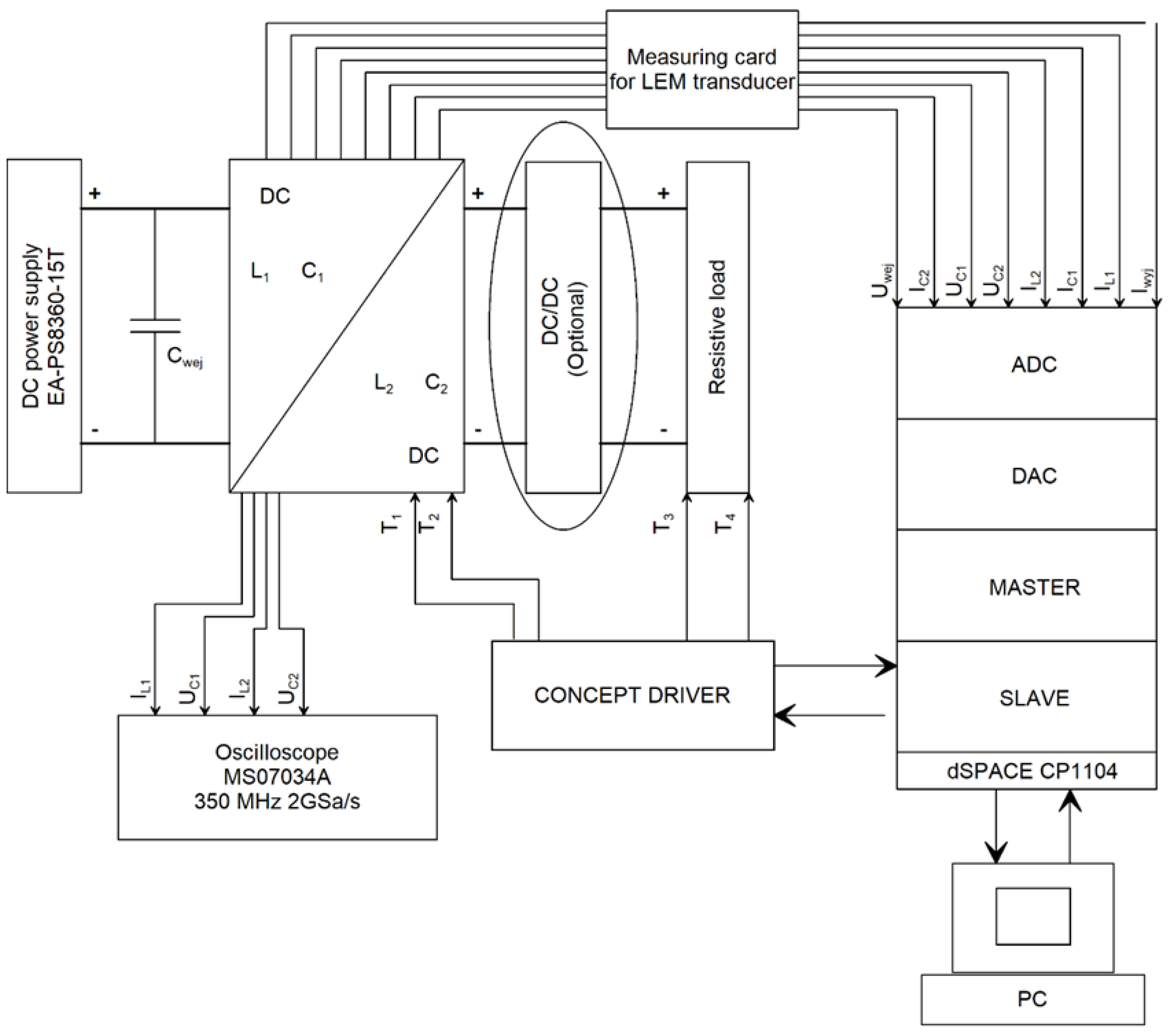
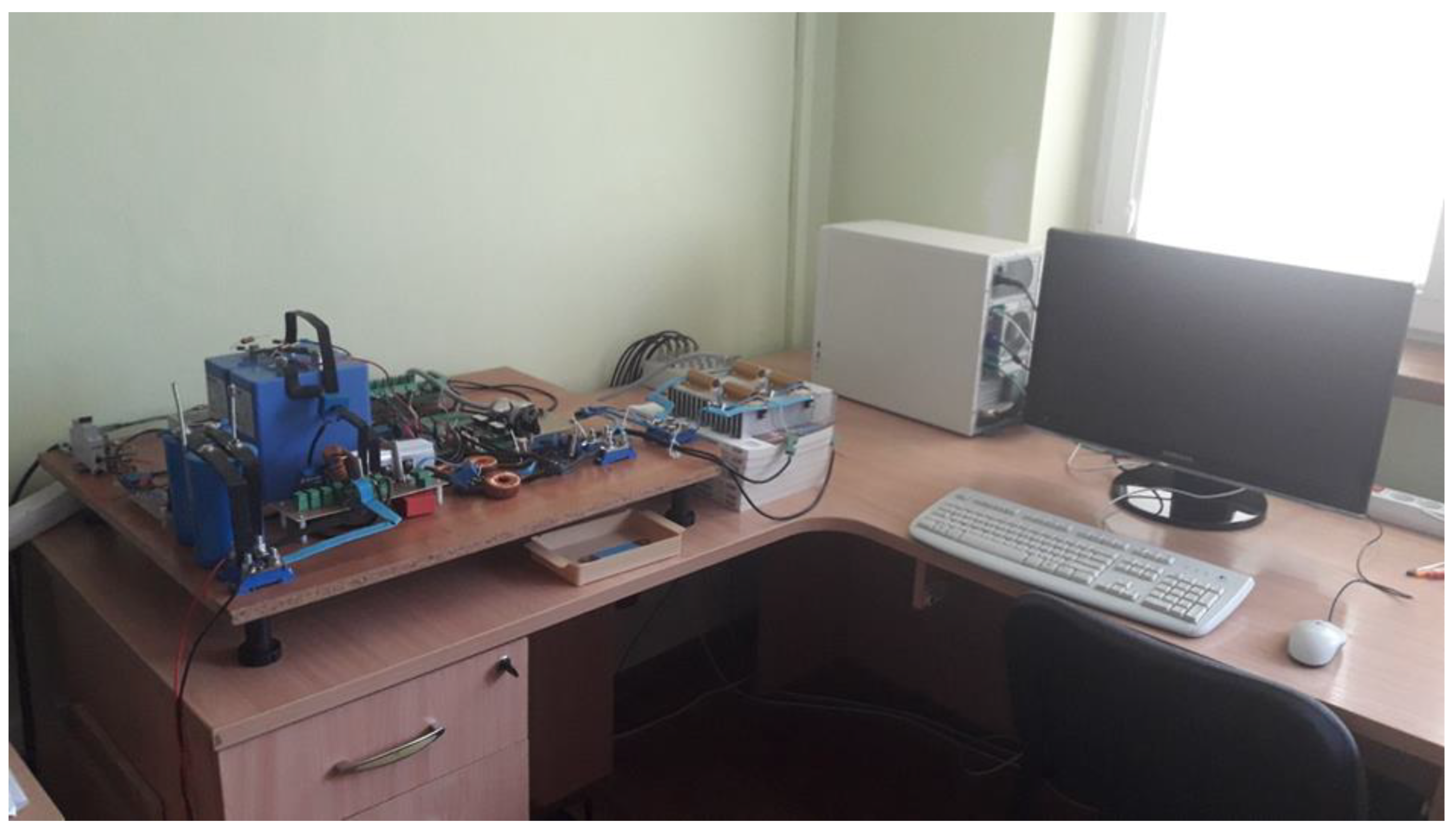
2.3. Laboratory Stand Setup
- dSPACE DS1104 card, which, together with a PC computer with Matlab/Simulink and ControlDesk software installed, constitutes the acquisition and control part;
- DC power supply with capacitance, which is the power source of the system;
- DC–DC step-down converter with input LC filter, made in the form of a circuit placed on a printed circuit board;
- Measurement card cooperating with LEM current and voltage converters, adjusting the voltage level for the dSPACE card;
- 2SC0108T2A0 controllers responsible for controlling the transistors of the converter itself as well as the configurable resistive load, optional step-down DC–DC converter simulating a constant power load, four-channel oscilloscope for measuring voltages and currents of energy storage components.
3. Results
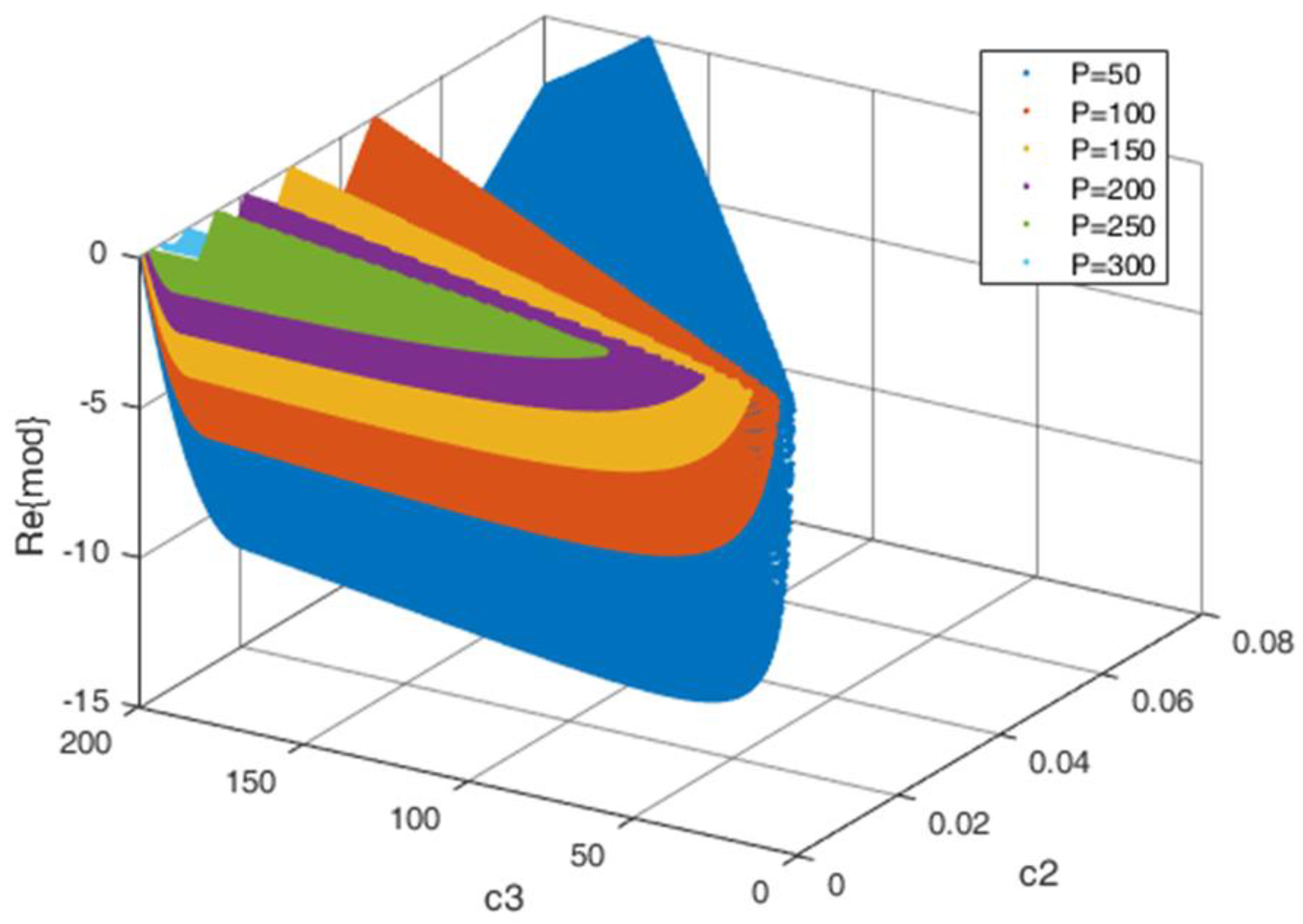
3.1. Simulation Results
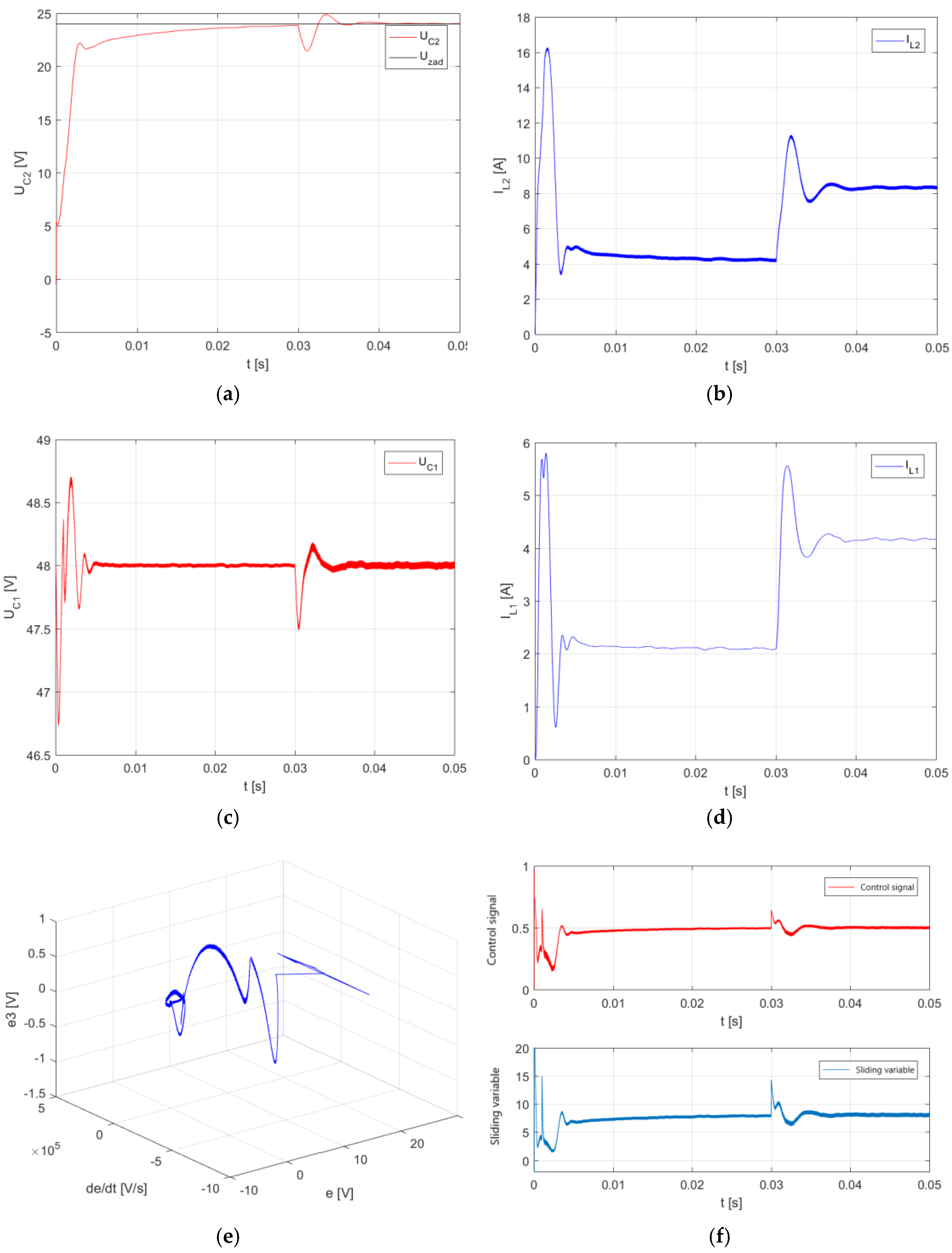
3.2. Experimental Results
- Start of the converter with open output terminals;
- Start of the converter with resistive load;
- A step change in the load from 8 Ω to 4 Ω;
- A step change in the load from 4 Ω to 8 Ω;
- Start of the converter with open output terminals;
- A step change in the load from 72 W to 144 W;
- A step change in the load from 144 W to 72 W.
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kohut, C.R. Input Filter Design Criteria for Switching Regulators Using Current-Mode Programming. IEEE Trans. Power Electron. 1992, 7, 469–479. [Google Scholar] [CrossRef]
- Erich, S.Y.; Polivka, W.A. Input Filter Design Criteria for Current-Programmed Regulators. IEEE Trans. Power Electron. 1992, 7, 143–151. [Google Scholar] [CrossRef]
- Mitchell, D.M. Power Line Filter Design Considerations for DC–DC Converters. IEEE Ind. Appl. Mag. 1999, 5, 16–26. [Google Scholar] [CrossRef]
- Erich, S.Y.; Polivka, W.M. Input Filter Design for Current-Programmed Regulators. In Proceedings of the Fifth Annual Proceedings on Applied Power Electronics Conference and Exposition, Los Angeles, CA, USA, 11–16 March 1990; pp. 781–791. [Google Scholar] [CrossRef]
- Erickson, R.W. Optimal Single Resistor Damping of Input Filters. In Proceedings of the APEC ‘99. Fourteenth Annual Applied Power Electronics Conference and Exposition, Dallas, TX, USA, 14–18 March 1999; Volume 2, pp. 1073–1079. [Google Scholar] [CrossRef]
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Jang, Y.; Erickson, R.W. Physical Origins of Input Filter Oscillations in Current Programmed Converters. IEEE Trans. Power Electron. 1992, 7, 725–733. [Google Scholar] [CrossRef]
- Wu, M.; Lu, D.D.C. A Novel Stabilization Method of LC Input Filter with Constant Power Loads Without Load Performance Compromise in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4552–4562. [Google Scholar] [CrossRef]
- Weichel, R.; Wang, G.; Mayer, J.; Hofmann, H. Active Stabilization of DC–DC Converters with Input LC Filters via Current-Mode Control and Input Voltage Feedback. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3409–3413. [Google Scholar] [CrossRef]
- Dominguez, F.; Fossas, E.; Martinez, L. Stability Analysis of a Buck Converter with Input Filter via Sliding-Mode Approach. In Proceedings of the IECON’94—20th Annual Conference of IEEE Industrial Electronics, Bologna, Italy, 5–9 September 1994; Volume 3, pp. 1438–1442. [Google Scholar] [CrossRef]
- Malinowski, M.; Bernet, S. A Simple Voltage Sensorless Active Damping Scheme for Three-Phase PWM Converters with an LCL Filter. IEEE Trans. Ind. Electron. 2008, 55, 1876–1880. [Google Scholar] [CrossRef]
- Huangfu, Y.; Pang, S.; Nahid-Mobarakeh, B.; Guo, L.; Rathore, A.K.; Gao, F. Stability Analysis and Active Stabilization of On-Board DC Power Converter System with Input Filter. IEEE Trans. Ind. Electron. 2018, 65, 790–799. [Google Scholar] [CrossRef]
- Renaudineau, H.; Martin, J.P.; Nahid-Mobarakeh, B.; Pierfederici, S. DC–DC Converters Dynamic Modeling with State Observer-Based Parameter Estimation. IEEE Trans. Power Electron. 2015, 30, 3356–3363. [Google Scholar] [CrossRef]
- Joshi, P.; Seshagiri, S. Comparative Analysis of Sliding Mode Designs for DC–DC Converters. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 538–543. [Google Scholar] [CrossRef]
- Ni, Y.; Xu, J. Study of Discrete Global-Sliding Mode Control for Switching DC–DC Converter. J. Circuits Syst. Comput. 2012, 20, 1197–1209. [Google Scholar] [CrossRef]
- Hooshmandi, K.; Bayat, F.; Bartoszewicz, A. Sampled-Data Linear Parameter Variable Approach for Voltage Regulation of DC–DC Buck Converter. Electronics 2022, 11, 3208. [Google Scholar] [CrossRef]
- Martinez-Salamero, L.; Cid-Pastor, A.; El Aroudi, A.; Giral, R.; Calvente, J.; Ruiz-Magaz, G. Sliding-Mode Control of DC–DC Switching Converters. IFAC Proc. Vol. 2011, 44, 1910–1916. [Google Scholar] [CrossRef]
- He, Y.; Luo, F.L. Study of Sliding-Mode Control for DC–DC Converters. In Proceedings of the 2004 International Conference on Power System Technology, Singapore, 21–24 November 2004; Volume 2, pp. 1969–1974. [Google Scholar] [CrossRef]
- Mahdavi, J.; Emadi, A.; Toliyat, H.A. Application of State Space Averaging Method to Sliding Mode Control of PWM DC/DC Converters. In Proceedings of the IAS ‘97. Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual Meeting, New Orleans, LA, USA, 5–9 October 1997; Volume 2, pp. 820–827. [Google Scholar] [CrossRef]
- Guldemir, H. Sliding Mode Control of DC–DC Boost Converter. J. Appl. Sci. 2005, 5, 588–592. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. General Design Issues of Sliding-Mode Controllers in DC–DC Converters. IEEE Trans. Ind. Electron. 2008, 55, 1160–1174. [Google Scholar] [CrossRef]
- Guldemir, H. Study of Sliding Mode Control of DC–DC Buck Converter. Energy Power Eng. 2011, 3, 401–406. [Google Scholar] [CrossRef]
- Chen, Z. PI and Sliding Mode Control of a Cuk Converter. IEEE Trans. Power Electron. 2012, 27, 3695–3703. [Google Scholar] [CrossRef]
- Drakunov, S.V.; Reyhanoglu, M.; Singh, B. Sliding Mode Control of DC–DC Power Converters. IFAC Proc. Vol. 2009, 42, 237–242. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Ha, D. A Sliding-Mode Duty-Ratio Controller for DC/DC Buck Converters with Constant Power Loads. IEEE Trans. Ind. Appl. 2014, 50, 1448–1458. [Google Scholar] [CrossRef]
- Zhang, F.; Yan, Y. Start-up Process and Step Response of a DCDC Converter Loaded by Constant Power Loads. IEEE Trans. Ind. Electron. 2011, 58, 298–304. [Google Scholar] [CrossRef]
- Sun, J.; Grotstollen, H. Averaged Modelling of Switching Power Converters: Reformulation and Theoretical Basis. In Proceedings of the PESC ‘92 Record 23rd Annual IEEE Power Electronics Specialists Conference, Toledo, Spain, 29 June–3 July 1992; pp. 1165–1172. [Google Scholar] [CrossRef]
- Zhu, Q. Complete Model-Free Sliding Mode Control (CMFSMC). Sci. Rep. 2021, 11, 22565. [Google Scholar] [CrossRef]
- Ebrahimi, N.; Ozgoli, S.; Ramezani, A. Model-Free Sliding Mode Control, Theory and Application. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 1292–1301. [Google Scholar] [CrossRef]
- Šabanović, A. Sliding Modes in Power Electronics and Motion Control Systems. In Proceedings of the IECON’03. 29th Annual Conference of the IEEE Industrial Electronics Societ, Roanoke, VA, USA, 2–6 November 2003; Volume 1, pp. 997–1002. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization. In Sliding Modes in Control and Optimization; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Passive Suppression | Active Suppression |
|---|---|
| Parallel to input LC filter capacitance RC series branch | In classic cascade regulators, the compensating signal addition occurs in:
|
| Parallel to input LC filter inductance RL series branch | Full state feedback controller |
| Series connection of parallel RL branch upon input LC filter | AI methods (neural networks, etc.) |
| Oversizing of input filter parameters | SMC |
| Name of the Parameter | Value |
|---|---|
| L1 | 100 µH |
| C1 | 600 µF |
| L1 | 990 µH |
| C1 | 1 mF |
| Uzad | 24 V |
| Uw | 48 V |
| R | 2–12 Ω |
| P | 50–300 W |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tatar, K.; Chudzik, P.; Leśniewski, P. Sliding Mode Control of Buck DC–DC Converter with LC Input Filter. Energies 2023, 16, 6983. https://doi.org/10.3390/en16196983
Tatar K, Chudzik P, Leśniewski P. Sliding Mode Control of Buck DC–DC Converter with LC Input Filter. Energies. 2023; 16(19):6983. https://doi.org/10.3390/en16196983
Chicago/Turabian StyleTatar, Karol, Piotr Chudzik, and Piotr Leśniewski. 2023. "Sliding Mode Control of Buck DC–DC Converter with LC Input Filter" Energies 16, no. 19: 6983. https://doi.org/10.3390/en16196983