
Analysis of the Influencing Factors of the Leak Detection Method Based on the Disturbance-Reflected Signal
Abstract
:1. Introduction
2. CFD Simulation
2.1. Geometric Model and Computational Grids
2.2. Mathematical Model
2.3. Boundary Condition and Solution Strategy
3. Pressure Disturbance Experiment and Model Validation
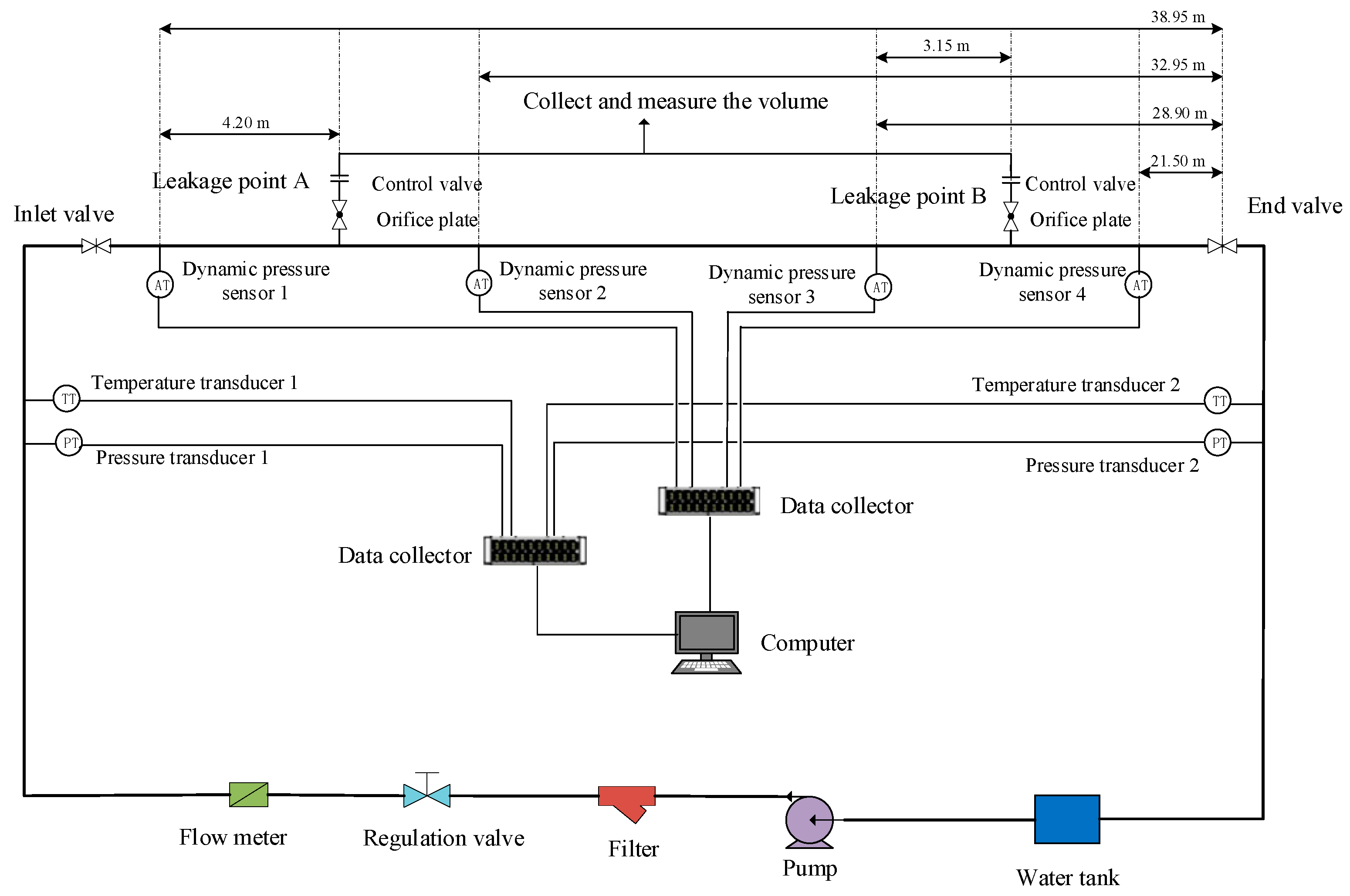
3.1. Pressure Disturbance Experiment
- The leakage orifice plates were separately installed at leakage points A and B. Leakage point A was opened, and then leakage point B was switched quickly until the pipeline entered a stable condition. The leakage point was closed after the acquisition of the dynamic pressure signal. This procedure was repeated many times through replacing the pressure levels and the sizes of the leakage orifice plates to complete the detection experiment with leakage points.
- The procedure was the same as the first step, except that leak point A was closed. This procedure was repeated many times through replacing the pressure levels and the sizes of the leakage orifice plates to complete the detection experiment without leakage points.
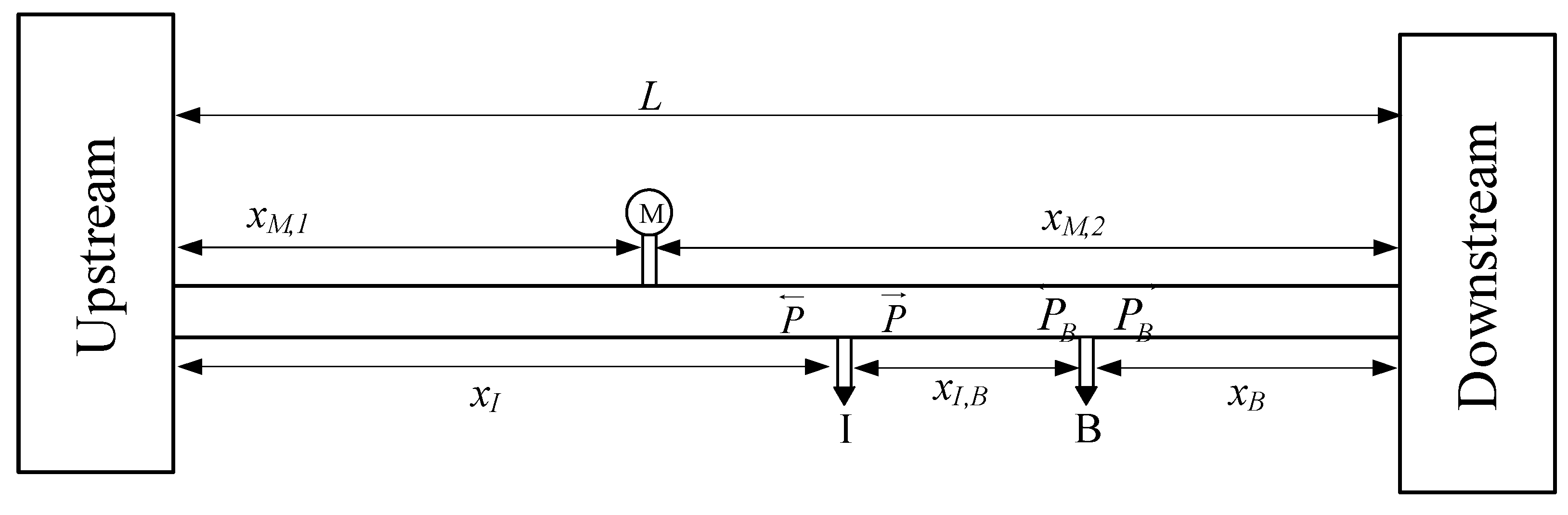
3.2. Model Validation
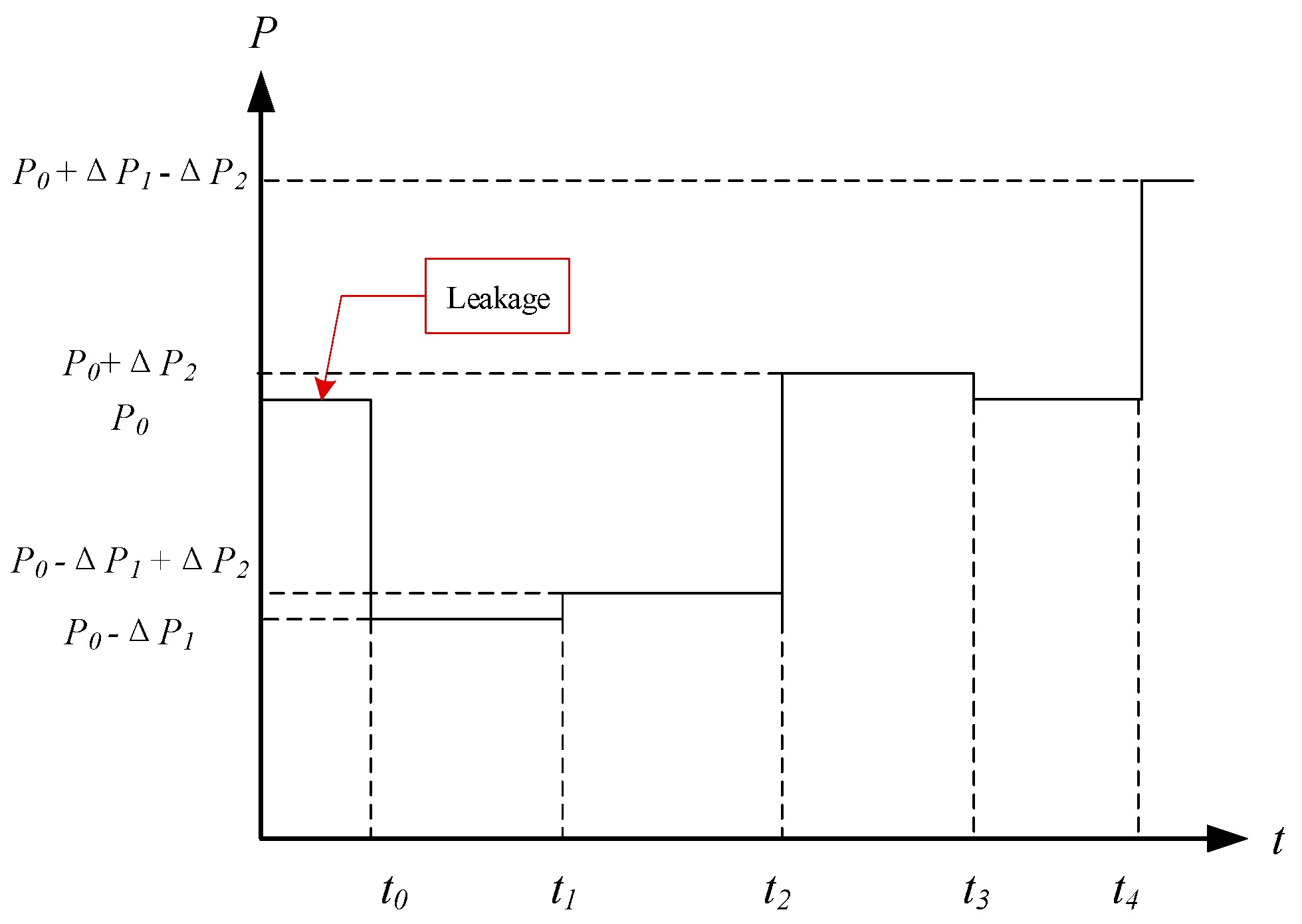
3.2.1. Reflection Analysis of Disturbing Signals under Ideal Conditions
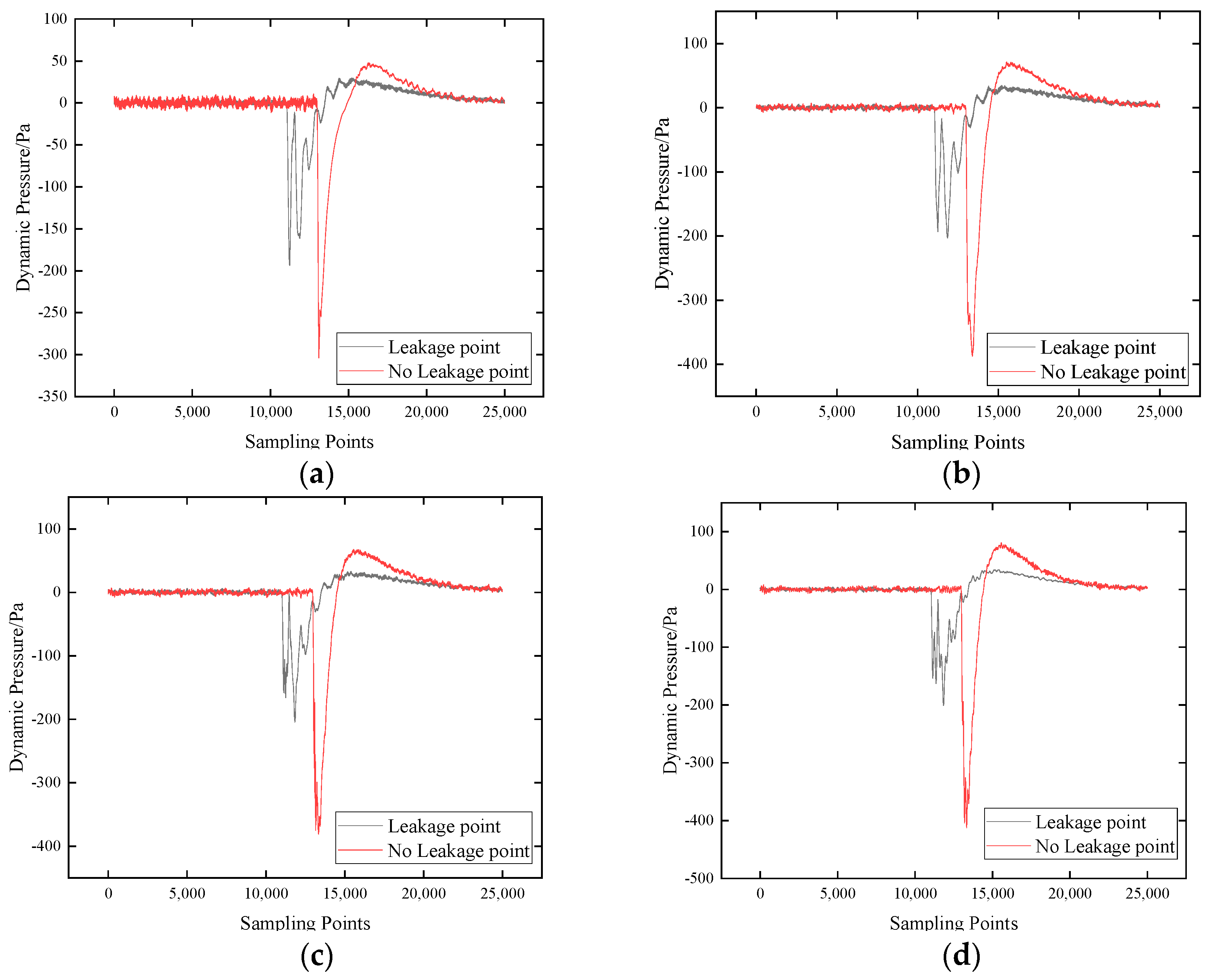
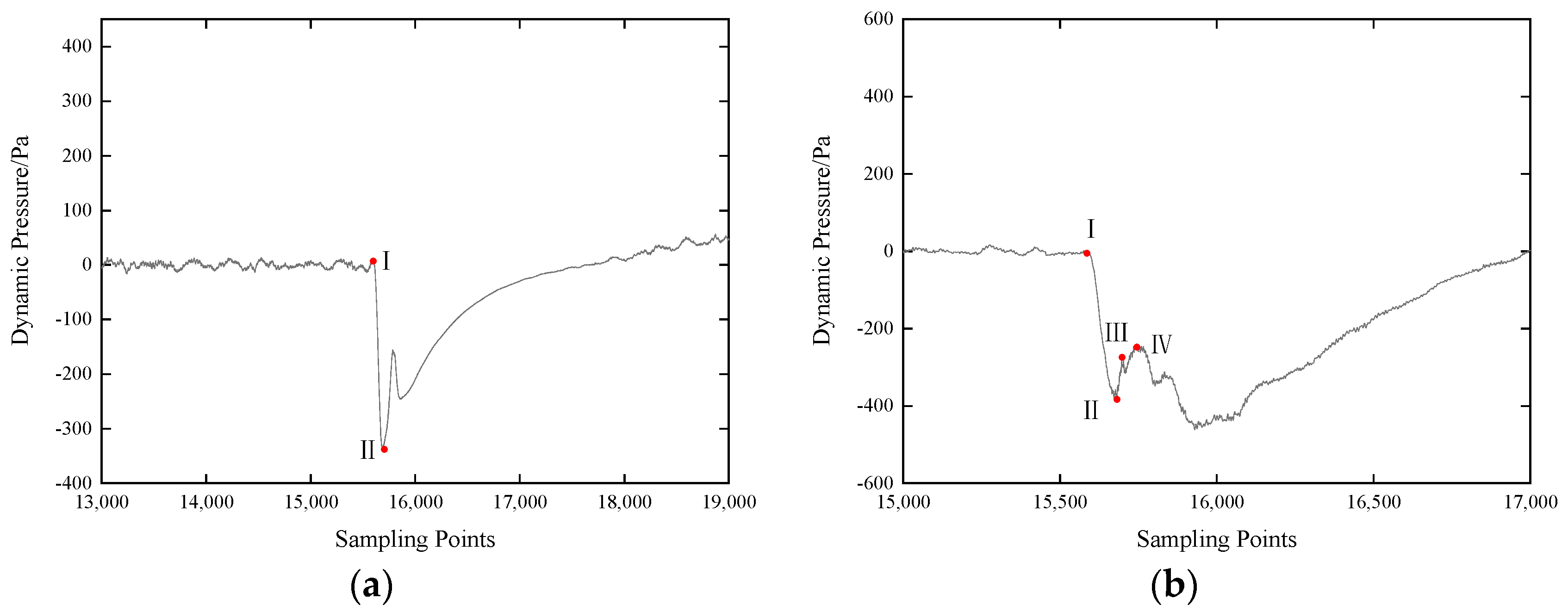
3.2.2. Reflection Analysis of Disturbing Signals under Experimental Conditions
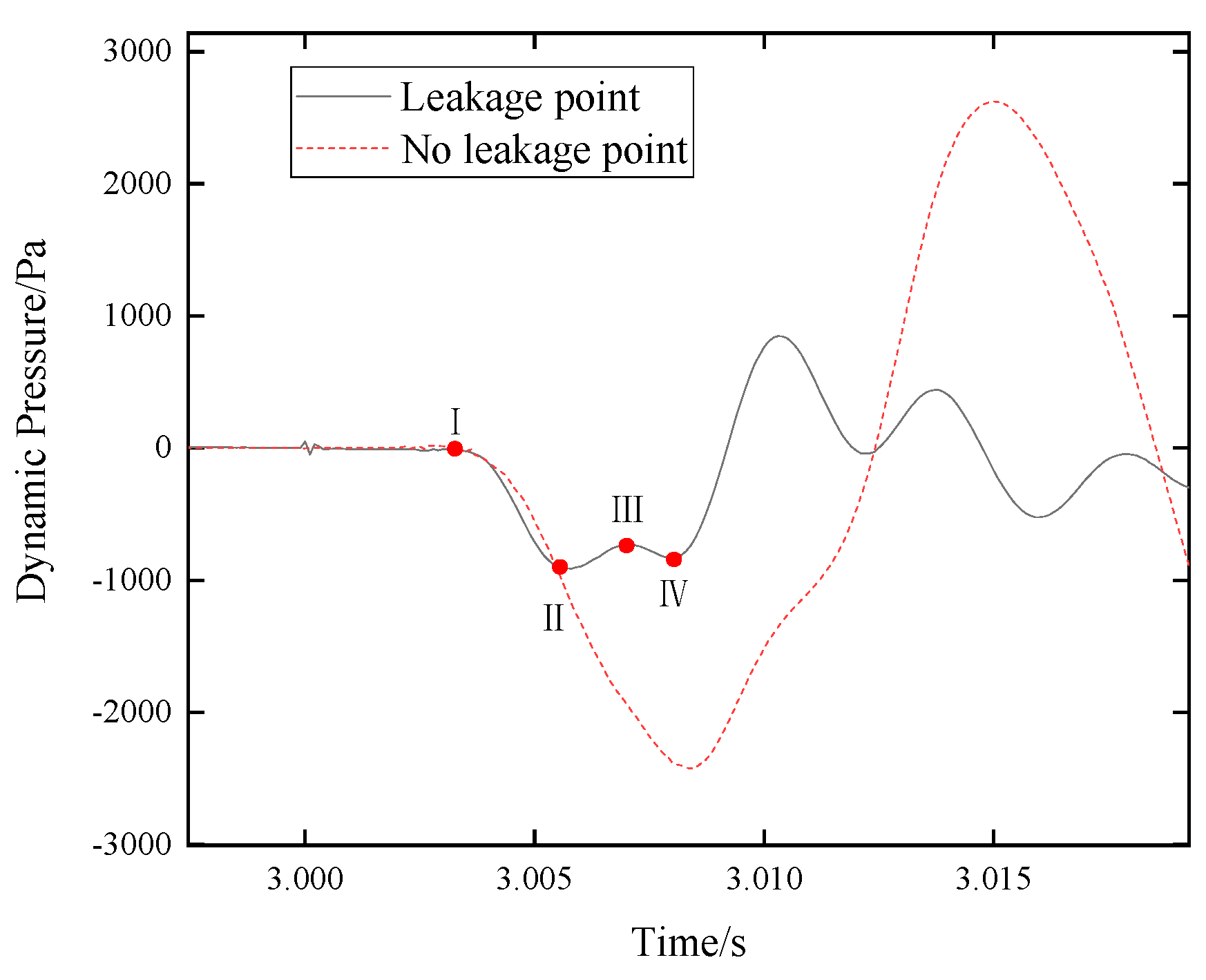
3.2.3. Reflection Analysis of Disturbing Signals under Simulation Conditions
4. Results and Discussion
5. Conclusions
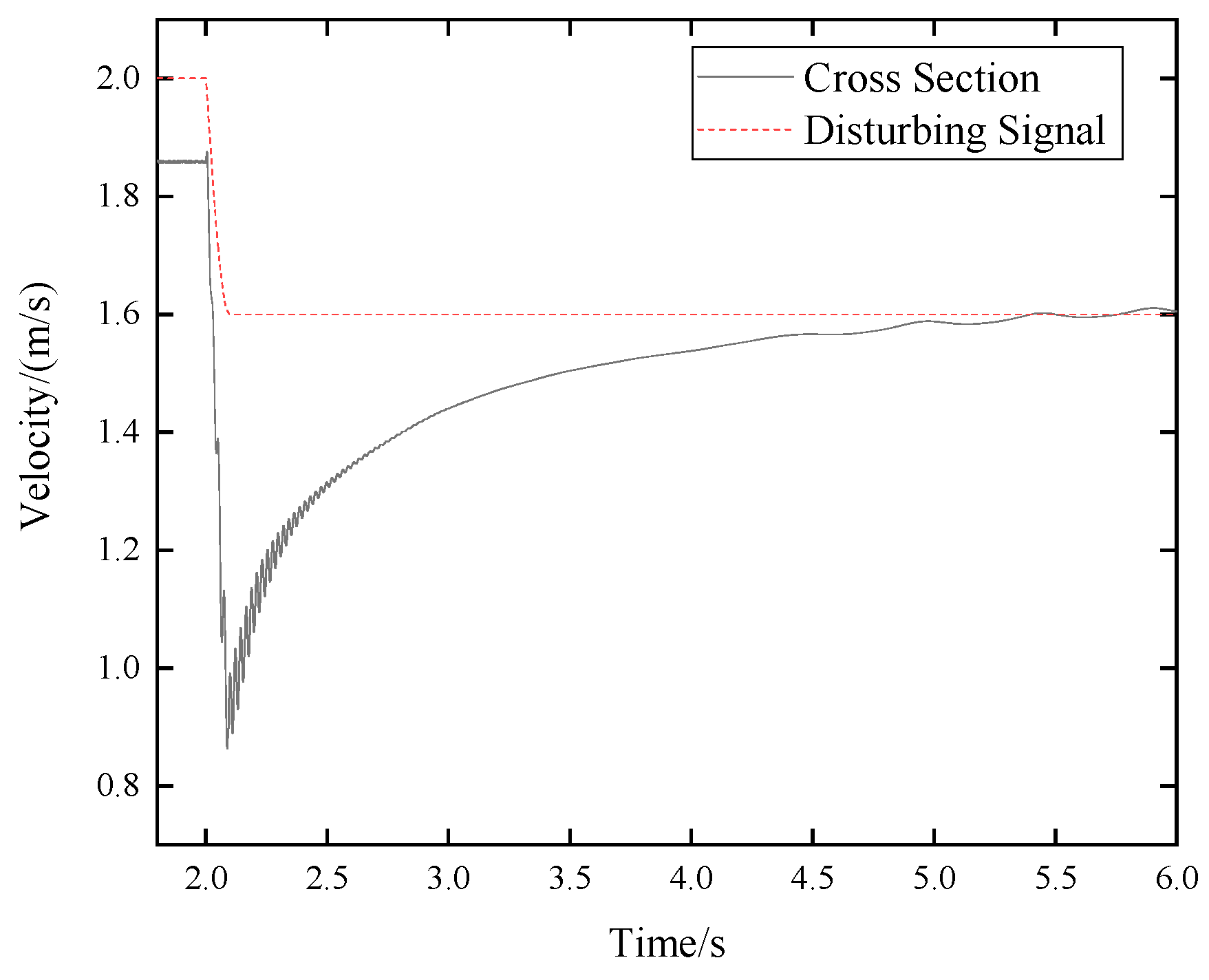
- The dynamic mesh technology can accurately control the valve opening and closing and realize the introduction of a disturbance signal. The 2D model can accurately locate the leakage position through the reflected signal.
- Disturbance signal is introduced by quickly switching the valve in the experiment, and the location of the leakage hole is achieved by analyzing the reflection signal characteristics. The relative error between the actual distance (13.25 m) and the calculated distance (12.661 m) of the leakage hole positioning is 4.447%. A reflected signal is also generated at the end boundary of the pipe, and the relative error is only 0.121% when the position of the reflected signal source is calculated using this signal.
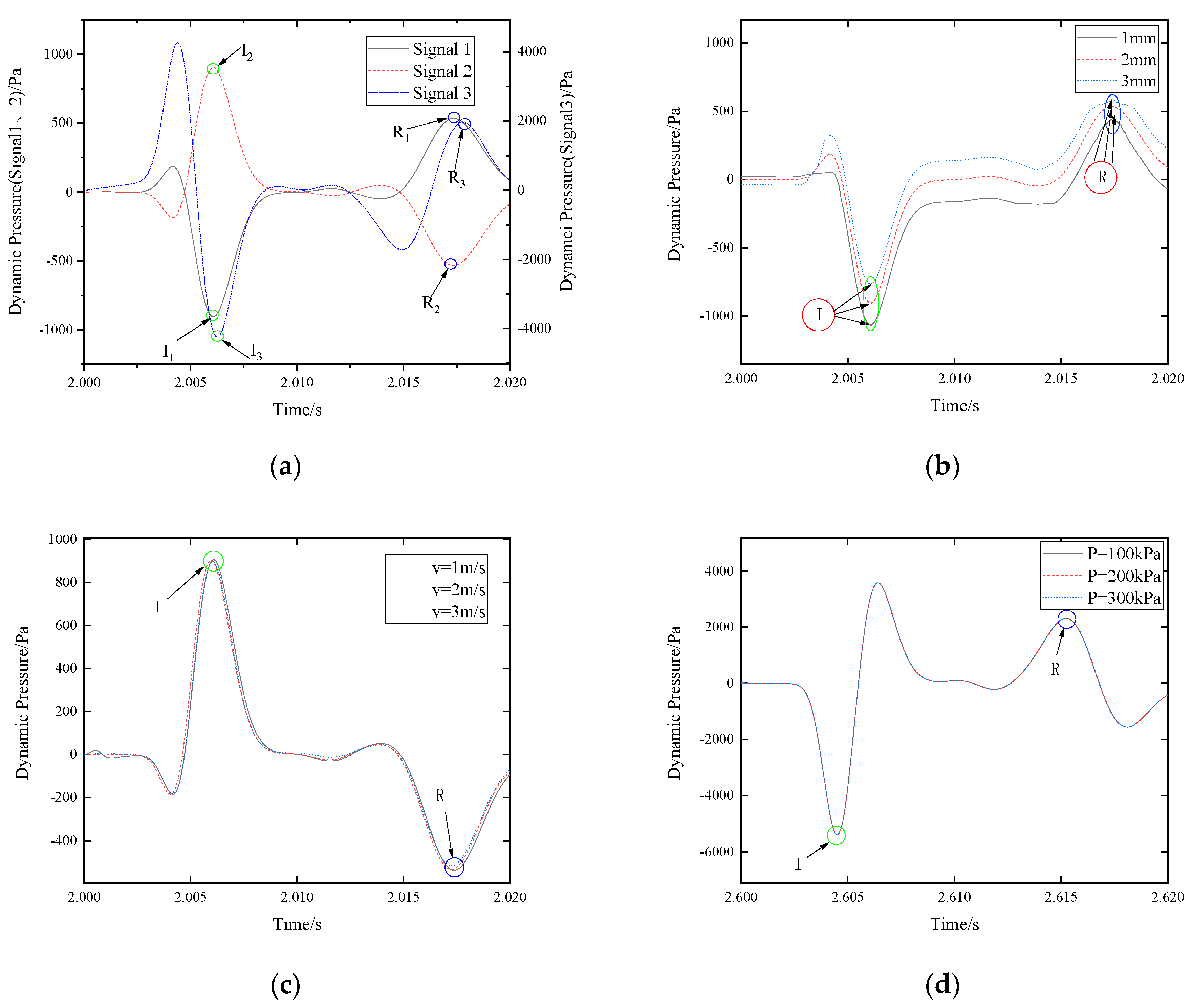
- The reflected signal is opposite to the disturbing signal. The amplitude of the reflected signal is positively correlated with the frequency of the disturbing signal, and the size of the leakage hole and the effect of the former are more prominent. However, the flow rate and the pressure of the pipeline have very limited influence on the reflected signal.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zaman, D.; Tiwari, M.K.; Gupta, A.K.; Sen, D. A Review of Leakage Detection Strategies for Pressurised Pipeline in Steady-State. Eng. Fail. Anal. 2019, 109, 104264. [Google Scholar] [CrossRef]
- Hankun, W.; Yunfei, X.; Bowen, S.; Chaoliang, Z.; Zhihua, W. Optimization and intelligent control for operation parameters of multiphase mixture transportation pipeline in oilfield: A case study. J. Pipeline Sci. Eng. 2021, 1, 367–378. [Google Scholar] [CrossRef]
- Yi, W.; Junfei, L.; Baoqiang, J.I.; Jian, J. Influence of flow pattern on leakage acoustic signal of multiphase pipeline. Oil Gas Storage Transp. 2021, 40, 1138–1143. [Google Scholar] [CrossRef]
- Chou, H.; Yeh, C.; Shu, C. Fire accident investigation of an explosion caused by static electricity in a propylene plant. Process. Saf. Environ. Prot. 2015, 97, 116–121. [Google Scholar] [CrossRef]
- Bo, L.; Lan, H.Q.; Nan, L. Diffusion simulation and safety assessment of oil leaked in the ground. J. Pet. Ence Eng. 2018, 167, 498–505. [Google Scholar] [CrossRef]
- Fu, H.; Yang, L.; Liang, H.; Wang, S.; Ling, K. Diagnosis of the single leakage in the fluid pipeline through experimental study and CFD simulation. J. Pet. Sci. Eng. 2020, 193, 107437. [Google Scholar] [CrossRef]
- Fu, H.; Wang, S.; Ling, K. Detection of two-point leakages in a pipeline based on lab investigation and numerical simulation. J. Pet. Sci. Eng. 2021, 204, 108747. [Google Scholar] [CrossRef]
- Molina-Espinosa, L.; Cazarez-Candia, O.; Verde-Rodarte, C. Modeling of incompressible flow in short pipes with leaks. J. Pet. Sci. Eng. 2013, 109, 38–44. [Google Scholar] [CrossRef]
- Martins, J.C.; Seleghim, P. Assessment of the Performance of Acoustic and Mass Balance Methods for Leak Detection in Pipelines for Transporting Liquids. J. Fluids Eng. 2010, 132, 011401. [Google Scholar] [CrossRef]
- Carvajal-Rubio, J.E.; Begovich, O.; Sanchez-Torres, J.D. Real-time leak detection and isolation in plastic pipelines with equivalent control based observers. In Proceedings of the 2015 12th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 28–30 October 2015. [Google Scholar]
- Sun, Y.W.; Zeng, B.Y.; Dai, Y.T.; Liang, X.J.; Zhang, L.J.; Ahmad, R.; Su, X.T. A novel hybrid technique for leak detection and location in straight pipelines—ScienceDirect. J. Loss Prev. Process. Ind. 2015, 35, 157–168. [Google Scholar] [CrossRef]
- Lu, W.; Liang, W.; Zhang, L.; Liu, W. A novel noise reduction method applied in negative pressure wave for pipeline leakage localization. Process. Saf. Environ. Prot. 2016, 104, 142–149. [Google Scholar] [CrossRef]
- Sun, Y.W.; Zeng, B.Y.; Dai, Y.T.; Liang, X.J.; Zhang, L.J.; Ahmad, R.; Su, X.T. A novel location algorithm for pipeline leakage based on the attenuation of negative pressure wave. Process. Saf. Environ. Prot. 2019, 123, 309–316. [Google Scholar] [CrossRef]
- Senthilkumar, T.; Jayas, D.S.; White, N. Detection of different stages of fungal infection in stored canola using near-infrared hyperspectral imaging. J. Stored Prod. Res. 2015, 63, 80–88. [Google Scholar] [CrossRef]
- Joe, H.-E.; Zhou, F.; Yun, S.-T.; Jun, M.B. Detection and quantification of underground CO2 leakage into the soil using a fiber-optic sensor. Opt. Fiber Technol. 2020, 60, 102375. [Google Scholar] [CrossRef]
- Liu, C.; Cui, Z.; Fang, L.; Li, Y.; Xu, M. Leak localization approaches for gas pipelines using time and velocity differences of acoustic waves. Eng. Fail. Anal. 2019, 103, 1–8. [Google Scholar] [CrossRef]
- Hu, Z.; Tariq, S.; Zayed, T. A comprehensive review of acoustic based leak localization method in pressurized pipelines. Mech. Syst. Signal Process. 2021, 161, 107994. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, J.; Huang, X.; Guo, X. Experimental study on distributed optical-fiber cable for high-pressure buried natural gas pipeline leakage monitoring. Opt. Fiber Technol. 2019, 53, 102028. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, C.; Liu, T.; Shao, Y.; Zhang, Y. Leakage detection and long-term monitoring in diaphragm wall joints using fiber Bragg grating sensing technology. Tunn. Undergr. Space Technol. 2020, 98, 103331. [Google Scholar] [CrossRef]
- Zhang, Z.; Hou, L.; Yuan, M.; Fu, M.; Qian, X.; Duanmu, W.; Li, Y. Optimization monitoring distribution method for gas pipeline leakage detection in underground spaces. Tunn. Undergr. Space Technol. 2020, 104, 103545. [Google Scholar] [CrossRef]
- Liu, C.; Li, Y.; Xu, M. An integrated detection and location model for leakages in liquid pipelines. J. Pet. Sci. Eng. 2019, 175, 852–867. [Google Scholar] [CrossRef]
- Lu, H.; Iseley, T.; Behbahani, S.; Fu, L. Leakage detection techniques for oil and gas pipelines: State-of-the-art. Tunn. Undergr. Space Technol. 2020, 98, 103249. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, H.; Tan, D.; Chen, X.; Lei, H. A novel acoustic emission detection module for leakage recognition in a gas pipeline valve. Process. Saf. Environ. Prot. 2017, 105, 32–40. [Google Scholar] [CrossRef] [Green Version]
- Banjara, N.K.; Sasmal, S.; Voggu, S. Machine learning supported acoustic emission technique for leakage detection in pipelines. Int. J. Press. Vessel. Pip. 2020, 188, 104243. [Google Scholar] [CrossRef]
- Ning, F.; Cheng, Z.; Meng, D.; Duan, S.; Wei, J. Enhanced Spectrum Convolutional Neural Architecture: An Intelligent Leak Detection Method for Gas Pipeline. Process. Saf. Environ. Prot. 2020, 146, 726–735. [Google Scholar] [CrossRef]
- Zadkarami, M.; Shahbazian, M.; Salahshoor, K. Pipeline leak diagnosis based on wavelet and statistical features using Dempster–Shafer classifier fusion technique. Process. Saf. Environ. Prot. 2017, 105, 156–163. [Google Scholar] [CrossRef]
- Badida, P.; Balasubramaniam, Y.; Jayaprakash, J. Risk evaluation of oil and natural gas pipelines due to natural hazards using fuzzy fault tree analysis. J. Nat. Gas Sci. Eng. 2019, 66, 284–292. [Google Scholar] [CrossRef]
- Xiang, W.; Zhou, W. Bayesian network model for predicting probability of third-party damage to underground pipelines and learning model parameters from incomplete datasets. Reliab. Eng. Syst. Saf. 2021, 205, 107262. [Google Scholar] [CrossRef]
- Cui, Y.; Quddus, N.; Mashuga, C. Bayesian Network and Game Theory Risk Assessment Model for Third-Party Damage to Oil and Gas Pipelines. Process. Saf. Environ. Prot. 2019, 134, 178–188. [Google Scholar] [CrossRef]
- Liu, A.; Chen, K.; Huang, X.; Li, D.; Zhang, X. Dynamic risk assessment model of buried gas pipelines based on system dynamics. Reliab. Eng. Syst. Saf. 2021, 208, 107326. [Google Scholar] [CrossRef]
- Wu, X.; Han, Y.; Zhang, X.; Lu, C. Hierarchically structured composites for ultrafast liquid sensing and smart leak-plugging. Phys. Chem. Chem. Phys. Pccp 2017, 19, 16198. [Google Scholar] [CrossRef]
- Brunone, B. Transient Test-Based Technique for Leak Detection in Outfall Pipes. J. Water Resour. Plan. Manag. 1999, 125, 302–306. [Google Scholar] [CrossRef]
- Brunone, B. Pipe system diagnosis and leak detection by unsteady-state tests. 2. Wavelet Anal.. Adv. Water Resour. 2003, 26, 107–116. [Google Scholar] [CrossRef]
- Brunone, B.; Ferrante, M.; Covas, D.; Ramos, H.; De Almeida, A.B. Detecting leaks in pressurised pipes by means of transients. J. Hydraul. Res. 2004, 42, 105–109. [Google Scholar] [CrossRef]
- Meniconi, S.; Brunone, B.; Ferrante, M.; Massari, C. Small Amplitude Sharp Pressure Waves to Diagnose Pipe Systems. Water Resour. Manag. 2011, 25, 79–96. [Google Scholar] [CrossRef]
- Brunone, B.; Meniconi, S.; Capponi, C.; Ferrante, M. Leak-Induced Pressure Decay During Transients in Viscoelastic Pipes. Preliminary Results. Procedia Eng. 2015, 119, 243–252. [Google Scholar] [CrossRef] [Green Version]
- Brunone, B.; Meniconi, S.; Capponi, C. Numerical analysis of the transient pressure damping in a single polymeric pipe with a leak. Urban Water J. 2018, 15, 760–768. [Google Scholar] [CrossRef]
- Lee, P.J.; Vítkovský, J.P.; Lambert, M.F.; Simpson, A.R.; Liggett, J.A. Leak location using the pattern of the frequency response diagram in pipelines: A numerical study. J. Sound Vib. 2005, 284, 1051–1073. [Google Scholar] [CrossRef] [Green Version]
- Mpesha, W.; Gassman, S.; Chaudhry, M. Leak Detection in Pipes by Frequency Response Method. J. Hydraul. Eng. 2001, 127, 134–147. [Google Scholar] [CrossRef]
- Guo, X.-L.; Yang, K.-L.; Li, F.-T.; Wang, T.; Fu, H. Analysis of First Transient Pressure Oscillation for Leak Detection in a Single Pipeline. J. Hydrodyn. 2012, 24, 363–370. [Google Scholar] [CrossRef]
- Liao, Z.; Yan, H.; Tang, Z.; Chu, X.; Tao, T. Deep learning identifies leak in water pipeline system using transient frequency response. Process. Saf. Environ. Prot. 2021, 155, 355–365. [Google Scholar] [CrossRef]
- Kim, S. Extensive Development of Leak Detection Algorithm by Impulse Response Method. J. Hydraul. Eng. 2005, 131, 201–208. [Google Scholar] [CrossRef]
- Wang, T. Research on Leakage Detection Technology of Oil Pipeline Based on Excitation Response. Chem. Autom. Instrum. 2006, 33, 59–63. (In Chinese) [Google Scholar]
- Elaoud, S.; Hadj-Taïeb, L.; Hadj-Taïeb, E. Leak detection of hydrogen–natural gas mixtures in pipes using the characteristics method of specified time intervals. J. Loss Prev. Process. Ind. 2010, 23, 637–645. [Google Scholar] [CrossRef]
- Liu, C.; Li, Y.; Fang, L.; Xu, M. Experimental study on a de-noising system for gas and oil pipelines based on an acoustic leak detection and location method. Int. J. Press. Vessel. Pip. 2017, 151, 20–34. [Google Scholar] [CrossRef]
- Fang, L.; Meng, L.; Liu, C.; Li, Y. Experimental study on the amplitude characteristics and propagation velocity of dynamic pressure wave for the leakage of gas-liquid two-phase intermittent flow in pipelines. Int. J. Press. Vessel. Pip. 2021, 193, 104457. [Google Scholar] [CrossRef]
- Wei, L.; Hui-Ping, G. A Study of Smallest Detectable Leakage Flow Rate Based on Negative Pressure Wave Method for Gas Pipelines. Comput. Simul. 2008, 32, 1680–1699. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Pipeline | Valve | Tube | Air | Total |
|---|---|---|---|---|---|
| 1 | 9854 | 6754 | 62 | 82 | 16,752 |
| 2 | 39,416 | 27,018 | 250 | 330 | 67,014 |
| 3 | 157,664 | 108,072 | 1000 | 1320 | 268,056 |
| 4 | 630,656 | 432,288 | 4000 | 5280 | 1,072,224 |
| Velocity/(m/s) | Pressure/kPa | ||
|---|---|---|---|
| Disturbance signal | 1 | 200 | |
| 2 | 200 | ||
| 3 | 200 | ||
| Flow rate | 1 | 200 | |
| 2 | 200 | ||
| Pressure | 1 | 100 | |
| 2 | 200 | ||
| 3 | 300 | ||
| Reflected Wave | Time/s | Distance/m | Actual Distance/m | Error/% | |
|---|---|---|---|---|---|
| II-III | Leak point reflection | 0.0158 | 16.6214 | 18 | 7.659 |
| II-IV | End reflection | 0.4485 | 47.307 | 47.25 | 0.121 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, D.; Cui, Z.; Liu, C.; Li, Y. Analysis of the Influencing Factors of the Leak Detection Method Based on the Disturbance-Reflected Signal. Energies 2023, 16, 572. https://doi.org/10.3390/en16020572
Guo D, Cui Z, Liu C, Li Y. Analysis of the Influencing Factors of the Leak Detection Method Based on the Disturbance-Reflected Signal. Energies. 2023; 16(2):572. https://doi.org/10.3390/en16020572
Chicago/Turabian StyleGuo, Dongsheng, Zhaoxue Cui, Cuiwei Liu, and Yuxing Li. 2023. "Analysis of the Influencing Factors of the Leak Detection Method Based on the Disturbance-Reflected Signal" Energies 16, no. 2: 572. https://doi.org/10.3390/en16020572