
A Novel Three-Layer Symmetry Winding Configuration for Five-Phase Motor
Abstract
:1. Introduction
2. Single-Layer Unconventional Winding Configuration Scheme
2.1. Principle of Phase Separation
2.2. Winding Connection Scheme
3. Three-Layer Unconventional Winding Configuration Promotion
3.1. Three-Layer, Nine-Phase Unconventional Winding
3.2. Three-Layer, Five-Phase Unconventional Winding
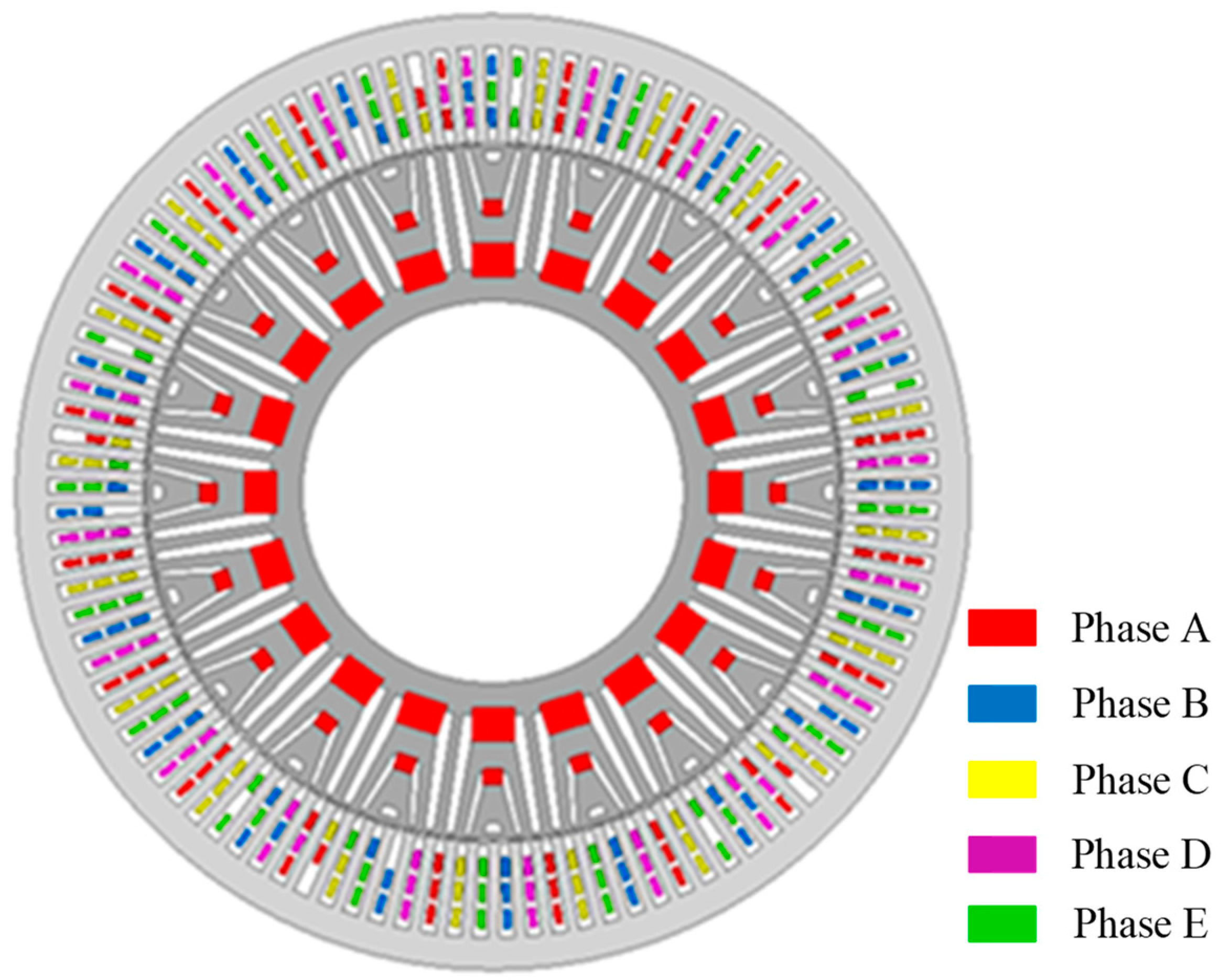
4. 105-Slot, 20-Pole, Triple-Winding, Five-Phase Motor
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ji, W.; Ni, F.; Gao, D.; Luo, S.; Lv, Q.; Lv, D. Electromagnetic Design of High-Power and High-Speed Permanent Magnet Synchronous Motor Considering Loss Characteristics. Energies 2021, 14, 3622. [Google Scholar] [CrossRef]
- Kiriyama, H.; Kawano, S.; Honda, Y.; Higaki, T.; Morimoto, S.; Takeda, Y. High performance synchronous reluctance motor with multi-flux barrier for the appliance industry. In Proceedings of the Conference Record of 1998 IEEE Industry Applications Conference. Thirty-Third IAS Annual Meeting (Cat. No.98CH36242), St. Louis, MO, USA, 12–15 October 1998. [Google Scholar] [CrossRef]
- Jankowska, K.; Mateusz, D. A Current Sensor Fault Tolerant Control Strategy for PMSM Drive Systems Based on Cri Markers. Energies 2021, 14, 3443. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Cheng, M.; Li, S. Fault-Tolerant Control of Dual Three-Phase Permanent-Magnet Synchronous Machine Drives Under Open-Phase Faults. IEEE Trans. Power Electron. 2016, 32, 2052–2063. [Google Scholar] [CrossRef]
- Miyamoto, Y.; Higuchi, T.; Abe, T.; Yokoi, Y. Fractional slot winding design method of Permanent-Magnet Synchronous Machines using Slot Star Diagram. In Proceedings of the 2013 International Conference on Electrical Machines and Systems (ICEMS). Busan, Korea, 26–29 October 2013; pp. 1032–1035. [Google Scholar]
- Xuewei, S.; Xuefang, S.; Wenqi, D.; Peng, Z.; Hongyan, J.; Jinfang, W.; Yang, W. Research on Energy Storage Configuration Method Based on Wind and Solar Volatility. In Proceedings of the 2020 10th International Conference on Power and Energy Systems (ICPES). Chengdu, China, 25–27 December 2020; pp. 464–468. [Google Scholar] [CrossRef]
- Wang, F.; Liu, D.; Zeng, L. Modeling and simulation of optimal wind turbine configurations in wind farms. In Proceedings of the 2009 World Non-Grid-Connected Wind Power and Energy Conference, Nanjing, China, 24–26 September 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Yan, Z.; Si, J.; Nie, R.; Cheng, Z.; Dong, L.; Li, Z. Comparative Analysis of Tubular Permanent Magnet Linear Generator With Equidirectional Toroidal Windings and Conventional Toroidal Windings. IEEE Trans. Ind. Appl. 2022, 58, 4614–4624. [Google Scholar] [CrossRef]
- Anh, H.; Hsieh, M. Comparative study of PM-assisted SynRM and IPMSM on constant power speed range for EV applications. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017; p. 1. [Google Scholar] [CrossRef]
- Jung, D.H.; Kwak, Y.; Lee, J.; Jin, C.S. Study on the Optimal Design of PMa-SynRM Loading Ratio for Achievement of Ultrapremium Efficiency. IEEE Trans. Magn. 2017, 53, 8001904. [Google Scholar] [CrossRef]
- El-Refaie, A.M. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines: Opportunities and Challenges. IEEE Trans. Ind. Electron. 2009, 57, 107–121. [Google Scholar] [CrossRef]
- Miyamoto, Y.; Higuchi, T.; Abe, T. Consideration for fractional slot winding of permanent magnet type synchronous machine. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Payza, O.; Demir, Y.; Aydin, M. Investigation of Losses for a Concentrated Winding High-Speed Permanent Magnet-Assisted Synchronous Reluctance Motor for Washing Machine Application. IEEE Trans. Magn. 2018, 54, 8207606. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Pre, M.; Grezzani, G. Design considerations for fractional-slot winding configurations of synchronous machines. IEEE Trans. Ind. Appl. 2006, 42, 997–1006. [Google Scholar] [CrossRef]
- Fornasiero, E.; Alberti, L.; Bianchi, N.; Bolognani, S. Considerations on Selecting Fractional-Slot Nonoverlapped Coil Windings. IEEE Trans. Ind. Appl. 2013, 49, 1316–1324. [Google Scholar] [CrossRef]
- Cousseau, R.; Romary, R.; Pusca, R.; Semail, E. Two-Slot Coil Pitch For Five-Phase Integrated Permanent Magnet Synchronous Machine. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 1615–1620. [Google Scholar] [CrossRef]
- Jalali, P.; Boroujeni, S.T.; Khoshtarash, J. Expansion of the Feasible Slot/Pole Combinations in the Fractional Slot PM Machines by Applying Three-Slot Pitch Coils. IEEE Trans. Energy Convers. 2018, 34, 993–999. [Google Scholar] [CrossRef]
- Chang, C.J.; Tai, C.C.; Lin, F.W.; Kuo, C.C.; Hung, C.M. Effects of Flexible Induction Coil Pitch on the Heating Performance of Thermotherapy Needles. IEEE Trans. Instrum. Meas. 2020, 69, 8983–8991. [Google Scholar] [CrossRef]
- Demir, Y.; El-Refaie, A.M.; Aydin, M. Investigation of Asymmetric and Unbalanced Winding Structures for 3-Phase Permanent Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2020, 36, 1722–1732. [Google Scholar] [CrossRef]
- Chen, Y.; Hao, W.; Yang, Y.; Kang, L.; Zhang, Q. Winding and Electromagnetic Analysis for 39-Slot/12-Pole Frameless Permanent Magnet Synchronous Motor. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar] [CrossRef]
- Aydin, M.; Demir, Y.; Yolacan, E.; Gulec, M.; El-Refaie, A.M. Design and Validation of an Unconventional 39-Slot PM Synchronous Motor With Asymmetric and Unbalanced AC Windings. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 1733–1744. [Google Scholar] [CrossRef]
- Guohai, L.; Li, W.; Chen, Q.; Mao, Y. Analysis and Application of Two-Layer Unconventional Windings for PM-Assisted Synchronous Reluctance Motors. Energies 2021, 14, 3447. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase A | Phase B | Phase C | ||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 6 | 7 | 4 | 5 | 11 | 2 | 3 | 9 |
| 13 | 14 | 19 | 12 | 17 | 18 | 10 | 15 | 16 |
| 20 | 26 | 27 | 24 | 25 | 30 | 21 | 22 | 28 |
| 32 | 33 | 39 | 31 | 36 | 37 | 29 | 34 | 35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Li, W.; Liu, G. A Novel Three-Layer Symmetry Winding Configuration for Five-Phase Motor. Energies 2023, 16, 682. https://doi.org/10.3390/en16020682
Liu Z, Li W, Liu G. A Novel Three-Layer Symmetry Winding Configuration for Five-Phase Motor. Energies. 2023; 16(2):682. https://doi.org/10.3390/en16020682
Chicago/Turabian StyleLiu, Zhengmeng, Wenxuan Li, and Guohai Liu. 2023. "A Novel Three-Layer Symmetry Winding Configuration for Five-Phase Motor" Energies 16, no. 2: 682. https://doi.org/10.3390/en16020682