
Refined Equivalent Modeling Method for Mixed Wind Farms Based on Small Sample Data


Abstract
:1. Introduction
- (1)
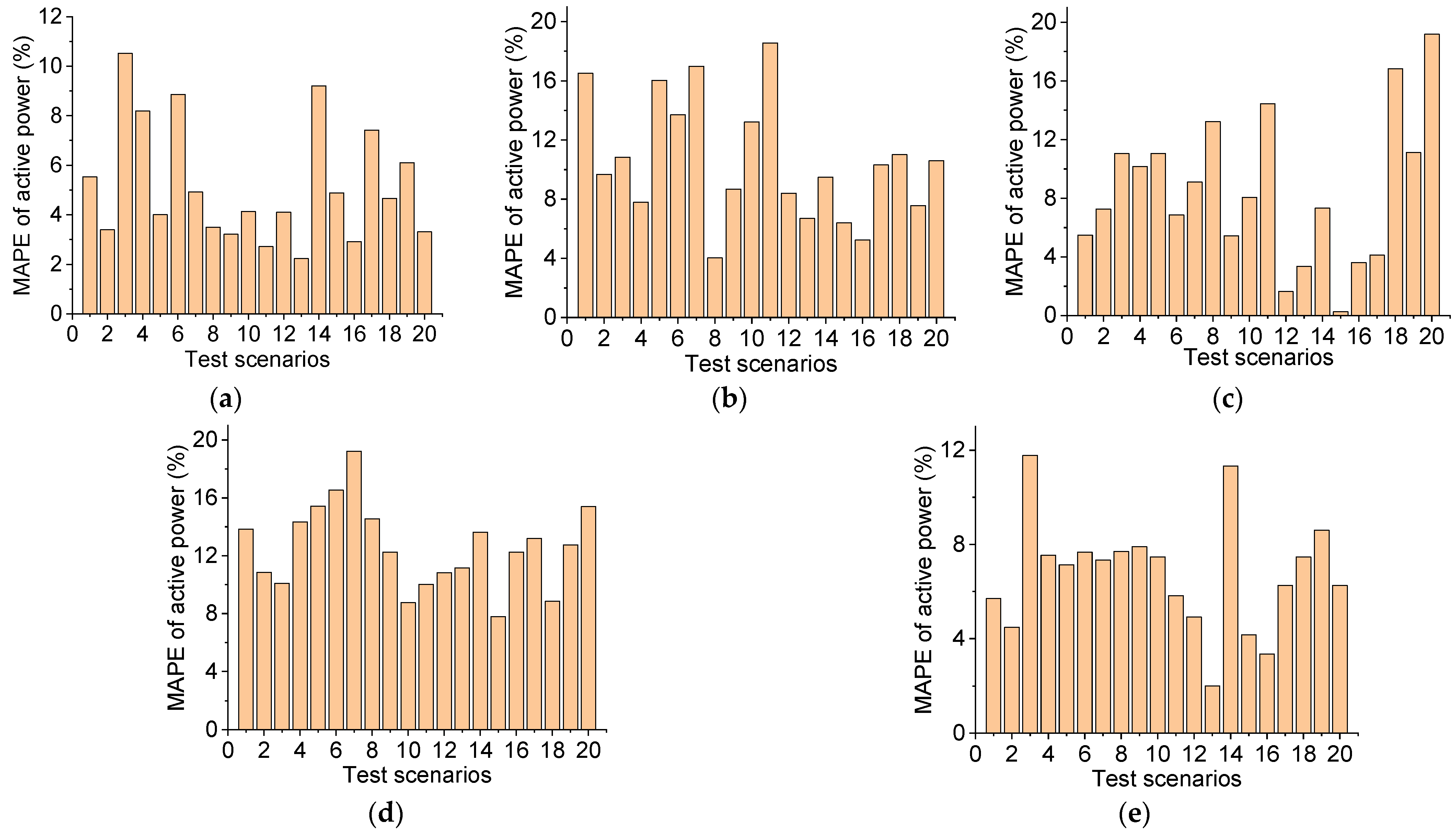
- The method of using multiple artificial neural networks (ANNs) to identify the electromechanical transient power fluctuation curve of mixed WFs is introduced into the research on equivalent modeling. For small sample data scenarios, the established model has good performance;
- (2)
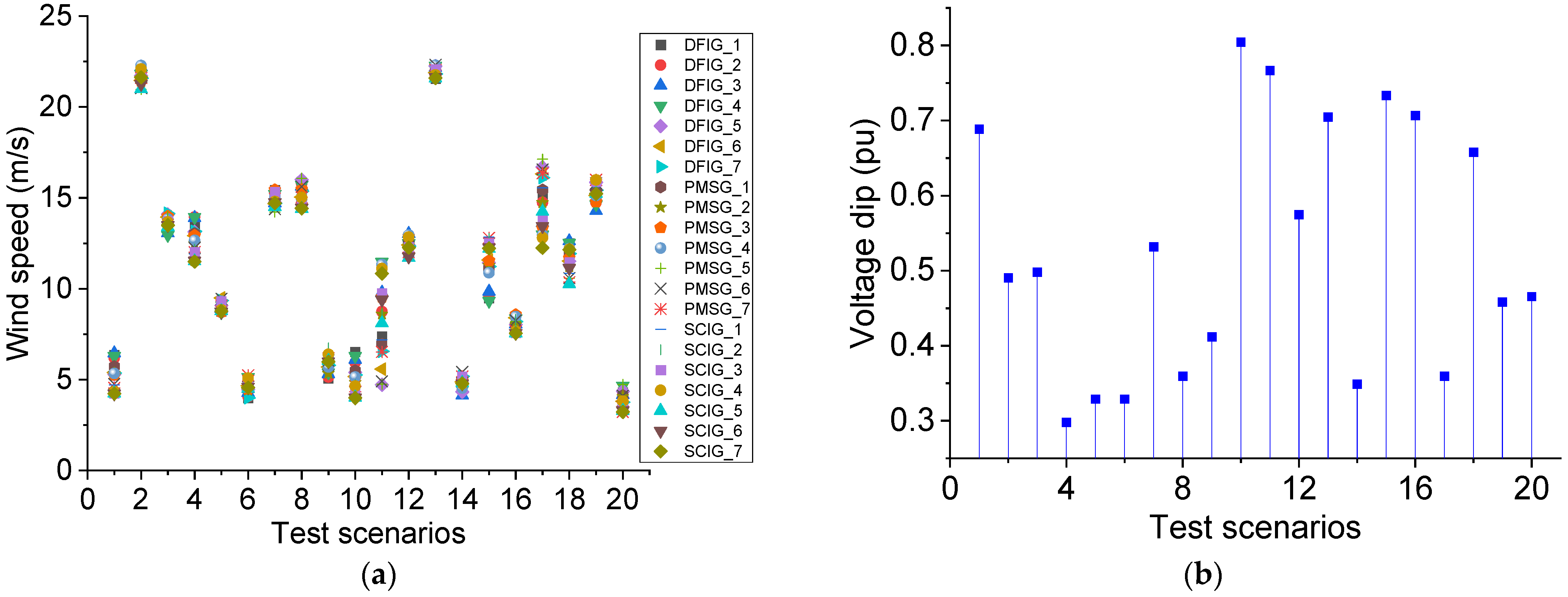
- Meaningful insights into how to select the equivalent node model are provided. The WT type, wind speed and direction, and the fault voltage dip are selected as the independent variables of the equivalent node model. The active power and reactive power at the point of connection (POC) are selected as the dependent variables.
2. Ideas and Methods
- (1)
- It focuses on the input and output characteristics of WFs, without emphasizing the internal topology information and operation principle. The WF structure modeling can be omitted;
- (2)
- The ANN has a large number of connections, and the weights of the connections correspond to the model parameters. By adjusting these parameters, the ANN can approximate the outputs of nonlinear systems;
- (3)
- The time spent on modeling is only related to the ANN and its learning algorithm, and no longer depends on the type and number of WTs within one WF.
3. External Characteristics of Mixed WF
3.1. Composition of Mixed WF
3.2. Influencing Factors of External Characteristics of Mixed WF
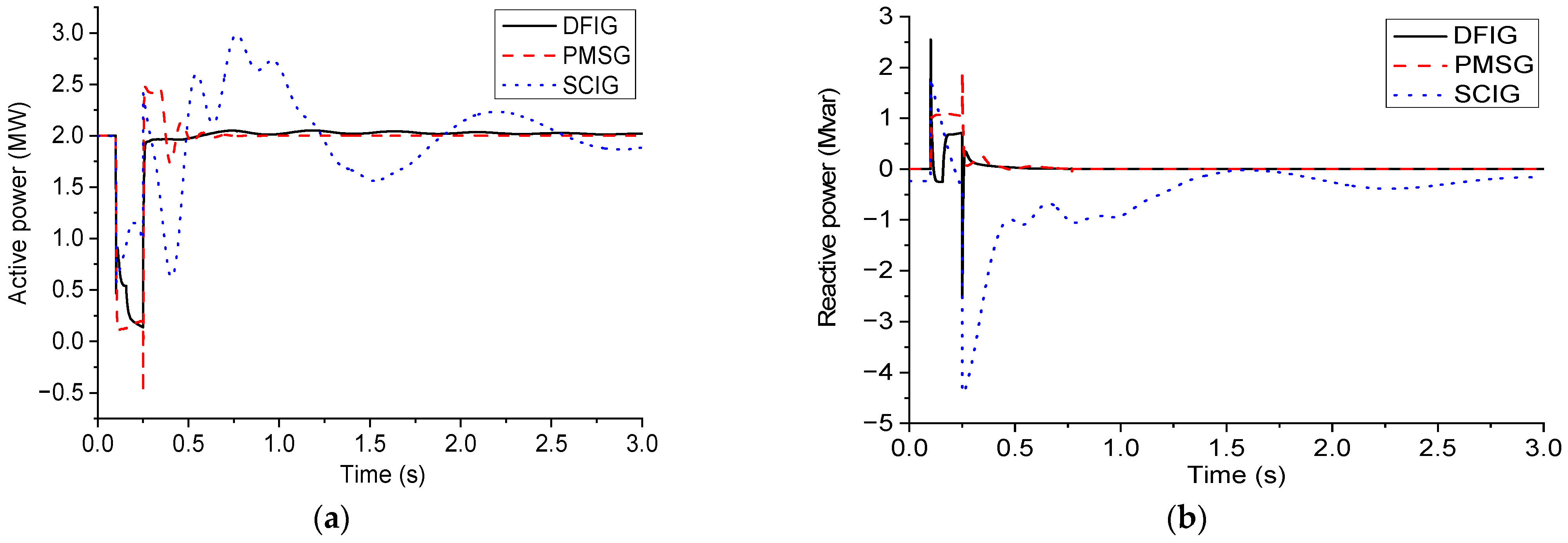
3.2.1. WT Type
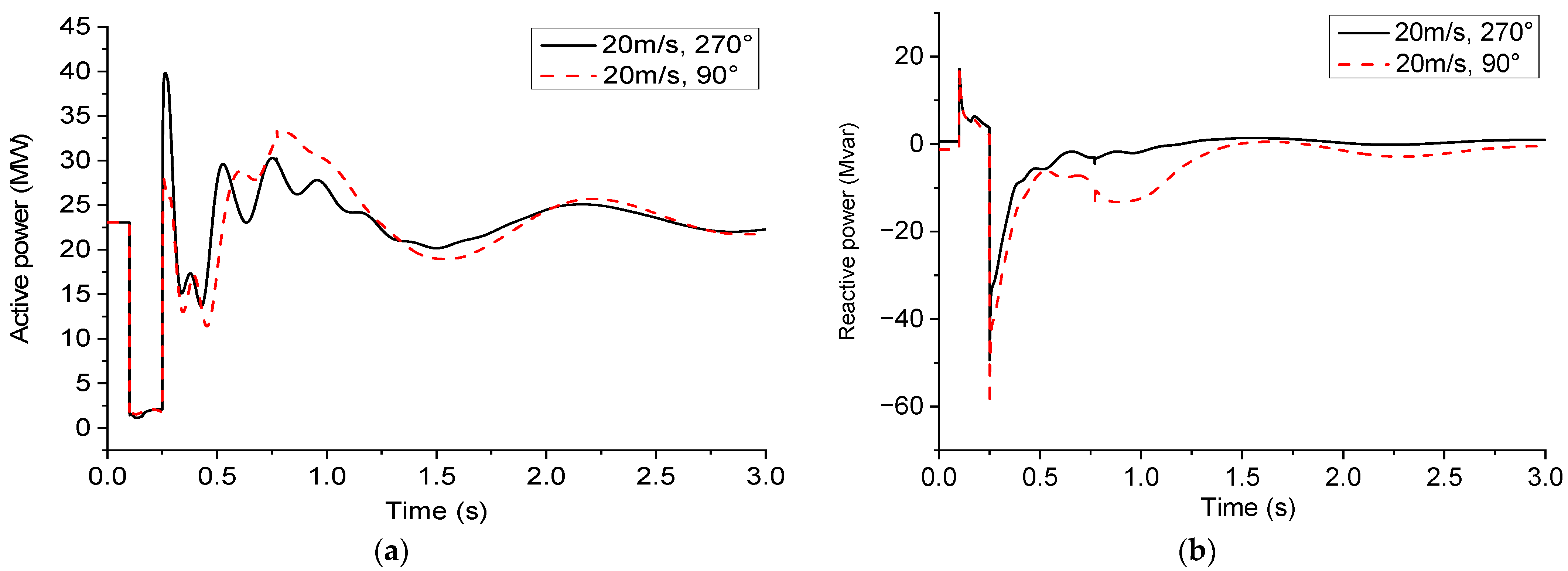
3.2.2. Wind Speed and Direction
3.2.3. Fault Voltage Dip
3.3. External Characteristic Analysis
4. Equivalent Node Modeling for Mixed Wind Farm
4.1. Equivalent Node Model
4.2. Experimental Design and Data Collection
4.3. BP-Based Equivalent Modeling
5. Example Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SCIG | Wind turbine | |||
| Blade radius (m) | 48 | Shaft system stiffness factor (pu/rad) | 1.11 | |
| Inertia time constant (s) | 3.5 | Rated wind speed (m/s) | 10 | |
| Cut-in wind speed (m/s) | 3 | Cut-out wind speed (m/s) | 23 | |
| Squirrel-cage induction generator | ||||
| Rated power (MW) | 2 | Rated frequency (Hz) | 50 | |
| Rated voltage (kV) | 0.69 | Stator impedance (pu) | 0.01 + j0.1 | |
| Rotor impedance (pu) | 0.01 + j0.1 | Stator and rotor mutual impedance (pu) | j3 | |
| Grounding transformer | ||||
| Rated capacity (MVA) | 2 | Impedance (pu) | j3 | |
| Rated Ratio (kV) | 25/0.575 | Rated frequency (Hz) | 50 | |
| DFIG | Wind Turbine | |||
| Blade radius (m) | 31 | Shaft system stiffness factor (pu/rad) | 1.11 | |
| Inertia time constant (s) | 4.32 | Rated wind speed (m/s) | 12.5 | |
| Cut-in wind speed (m/s) | 3 | Cut-out wind speed (m/s) | 23 | |
| Double-fed induction generators | ||||
| Rated power (MW) | 1.5 | Rated frequency (Hz) | 50 | |
| Rated voltage (kV) | 0.575 | Stator impedance (pu) | 0.016 + j0.16 | |
| Rotor impedance (pu) | 0.023 + j0.18 | Stator and rotor mutual impedance (pu) | j2.9 | |
| Power converters | ||||
| Rated capacity of rotor-side converter (MVA) | 0.525 | Rated capacity of grid-side converter (MVA) | 0.75 | |
| DC Bus Rated Voltage (kV) | 1.15 | DC side bus capacitance (F) | 0.01 | |
| Crowbar circuit input threshold (pu) | 2 | Crowbar circuit cut-out threshold (pu) | 0.35 | |
| Crowbar resistance (pu) | 0.1 | |||
| Grounding transformer | ||||
| Rated capacity (MVA) | 1.75 | Rated frequency (Hz) | 50 | |
| Rated Ratio (kV) | 25/0.575 | Impedance (pu) | 0.06 | |
| PMSG | Wind turbine | |||
| Blade radius (m) | 38 | Shaft system stiffness factor (pu/rad) | 1.2 | |
| Inertia time constant (s) | 4.6 | Rated wind speed (m/s) | 12.5 | |
| Cut-in wind speed (m/s) | 3 | Cut-out wind speed (m/s) | 23 | |
| Permanent magnet synchronous generator | ||||
| Rated power (MW) | 2 | Rated frequency (Hz) | 50 | |
| Rated voltage (kV) | 0.69 | Rated DC bus voltage (kV) | 1.1 | |
| Stator resistance (pu) | 0.0001 | d-axis inductance of stator (pu) | 1.5 | |
| q-axis inductance of stator (pu) | 1.5 | DC bus capacitor (F) | 0.01 | |
| Grounding transformer | ||||
| Rated capacity (MVA) | 2.5 | Rated frequency (Hz) | 50 | |
| Rated Ratio (kV) | 25/0.69 | Impedance (pu) | 0.06 | |
| Main Transformer | Rated capacity (MVA) | 150 | Rated frequency (Hz) | 50 |
| Rated Ratio (kV) | 220/25 | Impedance (pu) | 0.135 | |
| Cable line | Unit resistance (Ω/km) | 0.1153 | Unit inductance (Ω/km) | j0.3297 |
References
- Global Wind Energy Council. Global Wind Report 2021; Global Wind Energy Council: Brussels, Belgium, 2021; pp. 6–7. [Google Scholar]
- Wu, J.; Xiao, J.; Hou, J.; Lyu, X. Development potential assessment for wind and photovoltaic power energy resources in the main desert–gobi–wilderness areas of China. Energies 2023, 16, 4559. [Google Scholar] [CrossRef]
- Agarala, A.; Bhat, S.; Mitra, A.; Zycham, D.; Sowa, P. Transient stability analysis of a multi-machine power system integrated with renewables. Energies 2022, 15, 4824. [Google Scholar] [CrossRef]
- Skibko, Z.; Hołdynski, G.; Borusiewicz, A. Impact of wind power plant operation on voltage quality parameters—Example from Poland. Energies 2022, 15, 5573. [Google Scholar] [CrossRef]
- Fernández, L.M.; García, C.A.; Saenz, J.R.; Jurado, F. Equivalent models of wind farms by using aggregated wind turbines and equivalent winds. Energy Convers. Manag. 2009, 50, 691–704. [Google Scholar] [CrossRef]
- IEC 61400-27-1; Wind Turbines—Part 27-1: Electrical Simulation Models—Wind Turbines. International Electrotechnical Commission: Geneva, Switzerland, 2015.
- WECC Renewable Energy Modeling Task Force. WECC Wind Power Plant Dynamic Modeling Guidelines; EPRI: Washington, DC, USA, 2014. [Google Scholar]
- Trudnowski, D.J.; Gentile, A.; Khan, J.M.; Petritz, E.M. Fixed-speed wind-generator and wind-park modeling for transient stability studies. IEEE Trans. Power Syst. 2004, 19, 1911–1917. [Google Scholar] [CrossRef]
- Chao, P.; Li, W.; Liang, X.; Xu, S.; Shuai, Y. An analytical two-machine equivalent method of DFIG-based wind power plants considering complete FRT processes. IEEE Trans. Power Syst. 2021, 36, 3657–3667. [Google Scholar] [CrossRef]
- Zou, J.; Peng, C.; Yan, Y.; Zheng, H.; Li, Y. A survey of dynamic equivalent modeling for wind farm. Renew. Sustain. Energy Rev. 2014, 40, 956–963. [Google Scholar] [CrossRef]
- Akhmotov, V.; Knudsen, H. An aggregate model of a grid-connected, large-scale, offshore wind farm for power stability investigations—Importance of windmill mechanical system. Int. J. Electr. Power Energy Syst. 2002, 24, 709–717. [Google Scholar] [CrossRef]
- Brochu, J.; Larose, C.; Gagnon, R. Validation of single- and multiple-machine equivalents for modeling wind power plants. IEEE Trans. Energy Convers. 2011, 26, 532–541. [Google Scholar] [CrossRef]
- Teng, W.; Wang, X.; Meng, Y.; Shi, W. Dynamic clustering equivalent model of wind turbines based on spanning tree. J. Renew. Sustain. Energy 2015, 7, 063126. [Google Scholar] [CrossRef]
- Zhu, Q.; Ding, M.; Han, P. Equivalent modeling of DFIG-based wind power plant considering crowbar protection. Math. Probl. Eng. 2016, 2016, 8426492. [Google Scholar] [CrossRef]
- Wu, Z.; Cao, M.; Li, Y. An equivalent modeling method of DFIG-based wind farm considering improved identification of Crowbar status. Proc. CSEE 2022, 42, 603–614. [Google Scholar]
- Zhu, Q.; Ding, M. Equivalent modeling of PMSG-based wind power plants considering LVRT capabilities: Electromechanical transients in power systems. SpringerPlus 2016, 5, 2037. [Google Scholar]
- Jin, Y.; Wu, D.; Ju, P.; Rehtanz, C.; Wu, F.; Pan, X. Modeling of wind speeds inside a wind farm with application to wind farm aggregate modeling considering LVRT characteristic. IEEE Trans. Energy Convers. 2020, 35, 508–519. [Google Scholar] [CrossRef]
- Zou, J.; Peng, C.; Xu, H.; Yan, Y. A Fuzzy clustering algorithm-based dynamic equivalent modeling method for wind farm with DFIG. IEEE Trans. Energy Convers. 2015, 30, 1329–1337. [Google Scholar] [CrossRef]
- Han, J.; Li, L.; Song, H.; Liu, M.; Song, Z.; Qu, Y. An equivalent model of wind farm based on multivariate multi-scale entropy and multi-view clustering. Energies 2022, 15, 6054. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Xie, H.; Wu, B.; Yang, Y. Cluster division in wind farm through ensemble modelling. IET Renew. Power Gener. 2021, 16, 1299–1315. [Google Scholar] [CrossRef]
- Chandra, D.R.; Kumari, M.S.; Sydulu, M.; Grimaccia, F.; Mussetta, M.; Leva, S.; Duong, M.Q. Impact of SCIG, DFIG wind power plant on IEEE 14 bus system with small signal stability assessment. In Proceedings of the 2014 Eighteenth National Power Systems Conference, Guwahati, India, 18–20 December 2014. [Google Scholar]
- Nafisa, M.T.; Jahan, E.; Mannan, M.A. Design and analysis of a grid-tied dual rotor PMSG and SCIG-based wind farms. In Proceedings of the 2021 IEEE 9th Region 10 Humanitarian Technology Conference, Bangalore, India, 30 September–2 October 2021. [Google Scholar]
- Li, H.; Yang, C.; Zhao, B.; Wang, H.S.; Chen, Z. Aggregated models and transient performances of a mixed wind farm with different wind turbine generator systems. Electr. Power Syst. Res. 2012, 92, 1–10. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M.; Gomez-Exposito, A.; Solsona, J.A. An improved control strategy for hybrid wind farms. IEEE Trans. Sustain. Energy 2010, 1, 131–141. [Google Scholar] [CrossRef]
- Teninge, A.; Roye, D.; Bacha, S.; Duval, J. Low voltage ride-through capabilities of wind plant combining different turbine technologies. In Proceedings of the 2009 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009. [Google Scholar]
- Lee, S.; Kang, S.; Lee, G.-S. Predictions for Bending Strain at the Tower Bottom of Offshore Wind Turbine Based on the LSTM Model. Energies 2023, 16, 4922. [Google Scholar] [CrossRef]
- Chen, K.; Hu, J.; He, J. Detection and classification of transmission line faults based on unsupervised feature learning and convolutional sparse autoencoder. IEEE Trans. Smart Grid 2018, 9, 1748–1758. [Google Scholar]
- Yang, J.; Zheng, S.; Song, D.; Su, M.; Yang, X.; Joo, Y.H. Data-driven modeling for fatigue loads of large-scale wind turbines under active power regulation. Wind. Energy 2021, 24, 558–572. [Google Scholar] [CrossRef]
- Routray, A.; Reddy, Y.S.; Hur, S.-H. Predictive Control of a Wind Turbine Based on Neural Network-Based Wind Speed Estimation. Sustainability 2023, 15, 9697. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, W.; Shi, Z.; Ai, X.; Tang, Y.; Wen, J. Encoding time series as images: A robust and transferable framework for power system DIM identification combining rules and VGGNet. IEEE Trans. Power Syst. 2023, 38, 5781–5793. [Google Scholar] [CrossRef]
- Shen, H. Research on Virtual Sample Generation Technology and Its Application to Industrial Modeling. Master’s Thesis, Beijing University of Chemical Technology, Beijing, China, 2018. [Google Scholar]
- Chen, S. Study on the equivalent modeling of wind power farm based on LSTM multi-type wind turbine generators. J. Shandong Agric. Univ. 2020, 51, 294–297. [Google Scholar]
- Ding, X.; Pan, X.; He, D.; Liang, W.; Sun, X.; Guo, J. Wind farm dynamic equivalent modeling by GA-optimized GRU-LSTM-FC combined network. Electr. Power Autom. Equip. 2023, 43, 119–125. [Google Scholar]
- Saufi, S.R.; Ahmad, Z.A.B.; Leong, M.S.; Lin, M.H. Gearbox fault diagnosis using a deep learning model with limited data sample. IEEE Trans. Ind. Inform. 2020, 16, 6263–6271. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, L.; Qian, S. A small sample bearing fault diagnosis method based on variational mode decomposition, autocorrelation function, and convolutional neural network. Int. J. Adv. Manuf. Technol. 2023, 124, 3887–3898. [Google Scholar] [CrossRef]
- Liu, J.; Qu, F.; Hong, X.; Zhang, H. A small-sample wind turbine fault detection method with synthetic fault data using generative adversarial nets. IEEE Trans. Ind. Inform. 2019, 15, 3877–3888. [Google Scholar] [CrossRef]
- Zou, A.; Yang, C.; Wang, Y. A new method for stability analysis of recurrent neural networks with interval time-varying delay. IEEE Trans. Neural Networ. 2010, 21, 339–344. [Google Scholar]
- Xu, Z.; Ding, M. Empirical model for capacity credit evaluation of utility-scale PV plant. IEEE Trans. Sustain. Energy 2017, 8, 94–103. [Google Scholar]
- Zhu, Q.; Tao, J.; Deng, T.; Zhu, M. A general equivalent modeling method for DFIG wind farms based on data-driven modeling. Energies 2022, 15, 7205. [Google Scholar] [CrossRef]




| Ranking | (%) | (Mvar) | Ranking | (%) | (Mvar) |
|---|---|---|---|---|---|
| 1 | 5.78 | 0.267 | 11 | 9.89 | 0.676 |
| 2 | 6.31 | 0.383 | 12 | 10.05 | 0.872 |
| 3 | 7.11 | 0.465 | 13 | 10.23 | 0.765 |
| 4 | 7.50 | 0.496 | 14 | 10.45 | 0.696 |
| 5 | 7.68 | 0.561 | 15 | 10.86 | 0.723 |
| 6 | 8.43 | 0.605 | 16 | 11.32 | 0.705 |
| 7 | 8.60 | 0.622 | 17 | 11.57 | 0.912 |
| 8 | 9.12 | 0.593 | 18 | 11.68 | 0.725 |
| 9 | 9.26 | 0.536 | 19 | 12.22 | 1.160 |
| 10 | 9.53 | 0.623 | 20 | 13.18 | 1.362 |
| Time (s) | Active Power | Reactive Power | ||||
|---|---|---|---|---|---|---|
| Measured Value (MW) | Output of the Equivalent Node Model (MW) | (%) | Measured Value (Mvar) | Output of the Equivalent Node Model (Mvar) | ||
| 0.00 | 12.428 | 11.821 | 4.884 | 1.890 | 1.866 | 0.024 |
| 0.05 | 12.428 | 11.821 | 4.884 | 1.890 | 1.866 | 0.024 |
| 0.10 | 6.938 | 6.147 | 11.401 | 19.192 | 19.102 | 0.089 |
| 0.15 | 8.736 | 9.353 | 7.063 | 20.763 | 20.971 | 0.208 |
| 0.20 | 10.073 | 10.146 | 0.725 | 17.947 | 17.248 | 0.698 |
| 0.25 | 9.396 | 9.372 | 0.255 | 16.427 | 16.556 | 0.129 |
| 0.30 | 17.724 | 21.361 | 20.520 | −9.978 | −10.140 | 0.162 |
| 0.35 | 13.554 | 11.903 | 12.181 | −6.177 | −5.691 | 0.486 |
| 0.40 | 8.608 | 7.638 | 11.269 | −2.853 | −2.851 | 0.002 |
| 0.45 | 10.466 | 10.095 | 3.545 | −1.594 | −1.869 | 0.275 |
| 0.50 | 14.347 | 12.836 | 10.532 | −1.269 | −1.210 | 0.059 |
| 0.55 | 14.722 | 14.509 | 1.447 | −0.415 | −0.436 | 0.021 |
| 0.60 | 12.03 | 11.551 | 3.982 | 0.777 | 0.670 | 0.107 |
| 0.65 | 11.45 | 11.026 | 3.703 | 1.200 | 1.090 | 0.111 |
| 0.70 | 13.488 | 12.751 | 5.464 | 1.029 | 0.264 | 0.764 |
| 0.75 | 14.378 | 13.611 | 5.335 | 1.010 | 0.961 | 0.049 |
| 0.80 | 13.165 | 12.06 | 8.393 | 1.417 | 1.037 | 0.380 |
| 0.85 | 12.294 | 12.169 | 1.017 | 1.628 | 0.695 | 0.933 |
| 0.90 | 12.953 | 12.392 | 4.331 | 1.599 | 1.090 | 0.510 |
| 0.95 | 13.541 | 13.406 | 0.997 | 1.525 | 0.959 | 0.566 |
| 1.00 | 13.015 | 12.815 | 1.537 | 1.633 | 0.873 | 0.760 |
| 1.50 | 12.049 | 11.287 | 6.324 | 1.988 | 2.075 | 0.086 |
| 2.00 | 12.749 | 11.91 | 6.581 | 1.831 | 1.741 | 0.090 |
| 2.50 | 12.417 | 11.799 | 4.977 | 0.933 | 1.049 | 0.116 |
| 3.00 | 12.428 | 12.022 | 3.267 | 1.059 | 1.083 | 0.024 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Q.; Xiong, W.; Wang, H.; Jin, X. Refined Equivalent Modeling Method for Mixed Wind Farms Based on Small Sample Data. Energies 2023, 16, 7191. https://doi.org/10.3390/en16207191
Zhu Q, Xiong W, Wang H, Jin X. Refined Equivalent Modeling Method for Mixed Wind Farms Based on Small Sample Data. Energies. 2023; 16(20):7191. https://doi.org/10.3390/en16207191
Chicago/Turabian StyleZhu, Qianlong, Wenjing Xiong, Haijiao Wang, and Xiaoqiang Jin. 2023. "Refined Equivalent Modeling Method for Mixed Wind Farms Based on Small Sample Data" Energies 16, no. 20: 7191. https://doi.org/10.3390/en16207191
APA StyleZhu, Q., Xiong, W., Wang, H., & Jin, X. (2023). Refined Equivalent Modeling Method for Mixed Wind Farms Based on Small Sample Data. Energies, 16(20), 7191. https://doi.org/10.3390/en16207191