Author Contributions
Conceptualization, Z.-F.L. and M.-S.H.; methodology, Z.-F.L. and L.-W.H.; software, Z.-F.L. and L.-W.H.; validation, L.-W.H., S.-G.C., Y.-T.H. and J.-M.H.; formal analysis, Z.-F.L. and L.-W.H.; investigation, M.-S.H., Z.-F.L. and S.-G.C.; resources, M.-S.H.; data curation, Z.-F.L. and L.-W.H.; writing—original draft preparation, Z.-F.L.; writing—review and editing, M.-S.H.; visualization, Z.-F.L.; supervision, M.-S.H.; project administration, M.-S.H. and Z.-F.L.; funding acquisition, M.-S.H. All authors have read and agreed to the published version of the manuscript.
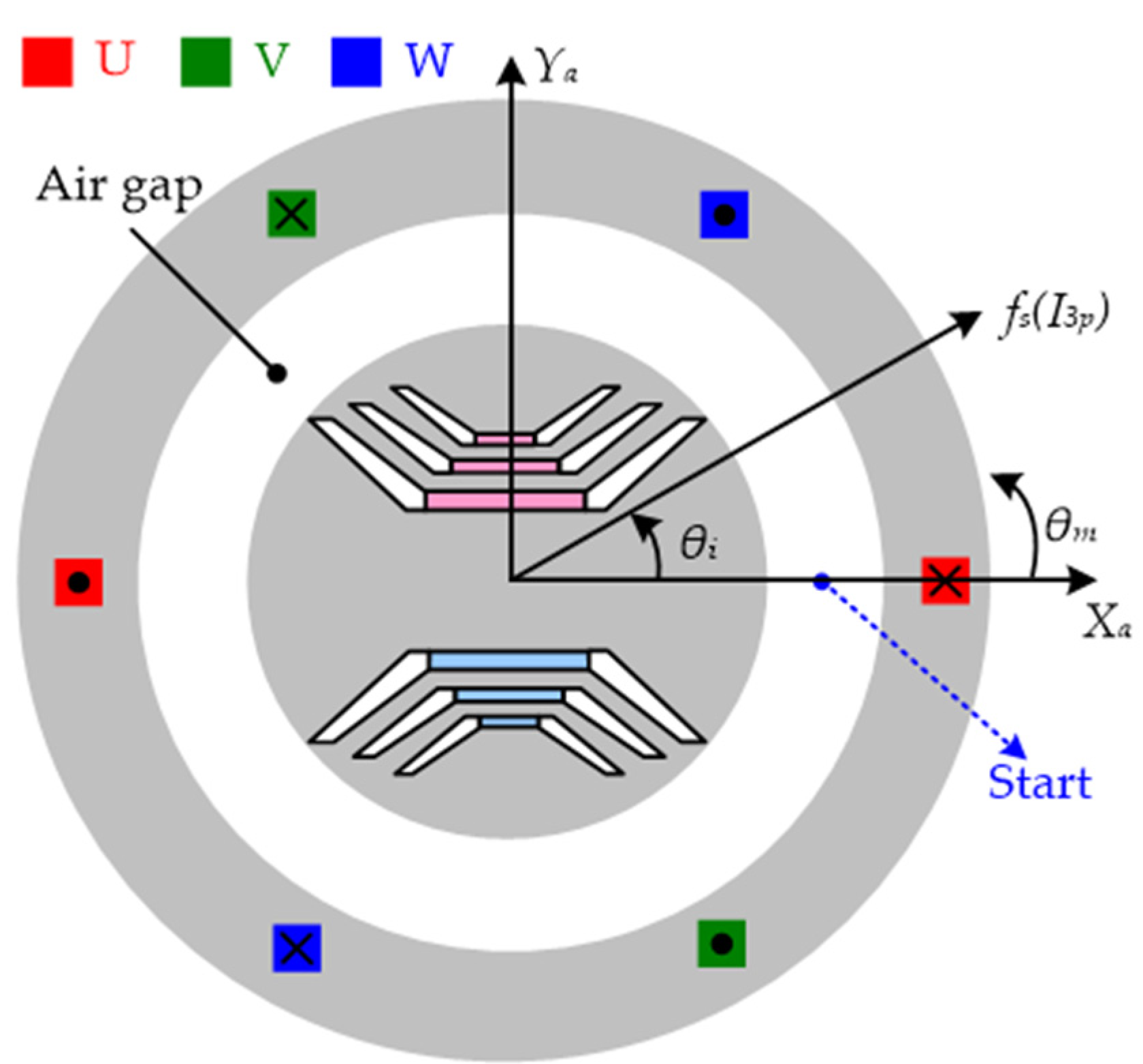
Figure 1.
Simplified schematic of a synchronous motor.
Figure 1.
Simplified schematic of a synchronous motor.
Figure 2.
Lorentz force in a wire of a rotor.
Figure 2.
Lorentz force in a wire of a rotor.
Figure 3.
Types of flux-density-produced mechanisms in the air gap: (a) flux density produced by the current (Bs); (b) flux density produced by the PM (BPM); (c) flux density produced by the rotor (Br); and (d) sum of BPM and Br (Bg).
Figure 3.
Types of flux-density-produced mechanisms in the air gap: (a) flux density produced by the current (Bs); (b) flux density produced by the PM (BPM); (c) flux density produced by the rotor (Br); and (d) sum of BPM and Br (Bg).
Figure 4.
Relationship between θi and the generated flux waveform (Bs).
Figure 4.
Relationship between θi and the generated flux waveform (Bs).
Figure 5.
Phasor diagrams of a synchronous motor: (a) SPMSM; (b) SynRM; and (c) IPMSM.
Figure 5.
Phasor diagrams of a synchronous motor: (a) SPMSM; (b) SynRM; and (c) IPMSM.
Figure 6.
Flux-density-produced mechanism in the air gap under ideal SPMSM: (a) Bs; (b) BPM; and (c) sum of BPM and Bs (Bg).
Figure 6.
Flux-density-produced mechanism in the air gap under ideal SPMSM: (a) Bs; (b) BPM; and (c) sum of BPM and Bs (Bg).
Figure 7.
Winding function of each phase.
Figure 7.
Winding function of each phase.
Figure 8.
Waveforms of Bs at 9.4 Arms: (a) θi = 0° and (b) θi = 60°.
Figure 8.
Waveforms of Bs at 9.4 Arms: (a) θi = 0° and (b) θi = 60°.
Figure 9.
The characteristics of BPM without a stator effect: (a) flux path and (b) waveform of BPM.
Figure 9.
The characteristics of BPM without a stator effect: (a) flux path and (b) waveform of BPM.
Figure 10.
Waveforms of Bg at 9.4 Arms: (a) θi = 0° and (b) θi = 60°.
Figure 10.
Waveforms of Bg at 9.4 Arms: (a) θi = 0° and (b) θi = 60°.
Figure 11.
Flowchart of the proposed torque estimation method.
Figure 11.
Flowchart of the proposed torque estimation method.
Figure 12.
Waveform of Bsl under the rated current of 9.4 Arms (θi = 0° and 30°).
Figure 12.
Waveform of Bsl under the rated current of 9.4 Arms (θi = 0° and 30°).
Figure 13.
Magnetic circuit in a 1/4 motor model: (a) flux path obtained when considering the effect of the stator slot and (b) constructed equivalent reluctance circuit.
Figure 13.
Magnetic circuit in a 1/4 motor model: (a) flux path obtained when considering the effect of the stator slot and (b) constructed equivalent reluctance circuit.
Figure 14.
Curve of ksat versus I3p.
Figure 14.
Curve of ksat versus I3p.
Figure 15.
Symmetrical half-slot model in which the rotor effect is not considered.
Figure 15.
Symmetrical half-slot model in which the rotor effect is not considered.
Figure 16.
Bs Waveform when considering the slot effect (I3p = 20 Apeak at θi = 0° and 60°).
Figure 16.
Bs Waveform when considering the slot effect (I3p = 20 Apeak at θi = 0° and 60°).
Figure 17.
Sketch of the rotor structure and direction of flux generated by the stator.
Figure 17.
Sketch of the rotor structure and direction of flux generated by the stator.
Figure 18.
Fitting results for the rotor: (a) kr,1(θi) and (b) θkr,1(θi).
Figure 18.
Fitting results for the rotor: (a) kr,1(θi) and (b) θkr,1(θi).
Figure 19.
Rotor geometry and equivalent circuit of an i-layer rotor: (a) full model and (b) simplified model.
Figure 19.
Rotor geometry and equivalent circuit of an i-layer rotor: (a) full model and (b) simplified model.
Figure 20.
Equivalent circuit of the rotor of the proposed PMASynRM with three-layer barriers.
Figure 20.
Equivalent circuit of the rotor of the proposed PMASynRM with three-layer barriers.
Figure 21.
Waveforms of BPM obtained through FEA simulation and the proposed method.
Figure 21.
Waveforms of BPM obtained through FEA simulation and the proposed method.
Figure 22.
Phasor diagram of the rotor of the proposed PMASynRM.
Figure 22.
Phasor diagram of the rotor of the proposed PMASynRM.
Figure 23.
MTPA curves of the two proposed motors at 9.4 Arms.
Figure 23.
MTPA curves of the two proposed motors at 9.4 Arms.
Figure 24.
Flux density distribution under different phase currents when θi = 0° and different phase currents: (a) 1 Arms and (b) 9.4 Arms.
Figure 24.
Flux density distribution under different phase currents when θi = 0° and different phase currents: (a) 1 Arms and (b) 9.4 Arms.
Figure 25.
Linear and nonlinear flux densities in the air gap under different currents when θi = 0°.
Figure 25.
Linear and nonlinear flux densities in the air gap under different currents when θi = 0°.
Figure 26.
Flux density distribution when considering the stator slot effect.
Figure 26.
Flux density distribution when considering the stator slot effect.
Figure 27.
Waveform of Bs obtained using different methods when Ip = 9.4 Arms and θi = 60°.
Figure 27.
Waveform of Bs obtained using different methods when Ip = 9.4 Arms and θi = 60°.
Figure 28.
Flux distribution of Br under the rated current when Ip = 9.4 Arms and different leading current angle: (a) θi = 0° and (b) θi = 90°.
Figure 28.
Flux distribution of Br under the rated current when Ip = 9.4 Arms and different leading current angle: (a) θi = 0° and (b) θi = 90°.
Figure 29.
Waveform of Br under different θi values and an Ip value of 9.4 Arms when θi = 0° and 60°.
Figure 29.
Waveform of Br under different θi values and an Ip value of 9.4 Arms when θi = 0° and 60°.
Figure 30.
Waveforms of Bg and Br at 9.4 Arms when θi = 60°.
Figure 30.
Waveforms of Bg and Br at 9.4 Arms when θi = 60°.
Figure 31.
Results obtained for sin (θgs,1) and sin (θrs,1) through FEA under different θi values.
Figure 31.
Results obtained for sin (θgs,1) and sin (θrs,1) through FEA under different θi values.
Figure 32.
Output torque of the PMASynRM obtained through FEA. (a) θi = 30° and (b) θi = 60°.
Figure 32.
Output torque of the PMASynRM obtained through FEA. (a) θi = 30° and (b) θi = 60°.
Figure 33.
Average output torque obtained through FEA and the proposed method.
Figure 33.
Average output torque obtained through FEA and the proposed method.
Figure 34.
Parts of the PMASynRM and the complete assembled motor: (a) rotor and stator; (b) ferrite PM; (c) winding; and (d) complete assembled motor.
Figure 34.
Parts of the PMASynRM and the complete assembled motor: (a) rotor and stator; (b) ferrite PM; (c) winding; and (d) complete assembled motor.
Figure 35.
Experimental setup for testing the proposed PMASynRM.
Figure 35.
Experimental setup for testing the proposed PMASynRM.
Figure 36.
Experimental torque values obtained under different conditions: (a) relationships between the current magnitude, the current angle, and the output torque (SPWM control and rotation speed of 1200 rpm); (b) θi = 30°, 1200rpm; and (c) θi = 60°, 1200 rpm.
Figure 36.
Experimental torque values obtained under different conditions: (a) relationships between the current magnitude, the current angle, and the output torque (SPWM control and rotation speed of 1200 rpm); (b) θi = 30°, 1200rpm; and (c) θi = 60°, 1200 rpm.
Table 1.
Key specifications and cross-sections of three types of synchronous motors.
Table 2.
The key parameters and proposed calculation results of a SPMSM torque under different θi.
Table 2.
The key parameters and proposed calculation results of a SPMSM torque under different θi.
| Parameters | Values |
|---|
| θi | 0° | 60° |
| ks | 1 | 1 |
| Bg,1 | 1.39 T/157.7° | 0.88 T/162.4° |
| Bs,1 | 0.52 T/90.0° | 0.52 T/30.0° |
| BPM,1 | 1.29 T/180.0° | 1.29 T/180.0° |
| rg | 47.35 mm | 47.35 mm |
| θgs,1 | 67.7° | 132.4° |
| Torque (Cal) | 54.6 Nm | 27.6 Nm |
| Torque (FEA) | 53.1 Nm | 26.3 Nm |
| Error | 2.8% | 4.9% |
Table 3.
Geometric data of the proposed PMASynRM.
Table 3.
Geometric data of the proposed PMASynRM.
| Parameter | Value | Description |
|---|
| Brem | 0.43 T | Remanence flux density of ferrite PM. |
| g | 0.3 mm | Air gap length. |
| lstk | 150.0 mm | Stack length of motor. |
| θbs,l1 | 16.9° | Half angle of the layer 1, layer 2, and layer 3 barrier at start point. |
| θbs,l2 | 26.1° |
| θbs,l3 | 33.7° |
| θbe,l1 | 20.8° | Half angle of the layer 1, layer 2, and layer 3 barrier at end point. |
| θbe,l2 | 30.3° |
| θbe,l3 | 37.7° |
| wPM,l1 | 10.6 mm | PM width of layer 1, layer 2, and layer 3. |
| wPM,l2 | 14.5 mm |
| wPM,l3 | 20.0 mm |
| lPM,l1 | 2.9 mm | PM length of layer 1, layer 2, and layer 3. |
| lPM,l2 | 4.3 mm |
| lPM,l3 | 4.3 mm |
| wb,l1 | 7.9 mm | Side width of the layer 1, layer 2, and layer 3 barrier. |
| wb,l2 | 13.5 mm |
| wb,l3 | 16.4 mm |
| lb,l1 | 3.1 mm | Side length of the layer 1, layer 2, and layer 3 barrier. |
| lb,l2 | 3.7 mm |
| lb,l3 | 4.9 mm |
Table 4.
Parameters of the phase diagram used for the flux density calculation.
Table 4.
Parameters of the phase diagram used for the flux density calculation.
| | Simulation | Proposed Calculation |
|---|
| θi | 30° | 60° | 30° | 60° |
| BPM,1 | 0.15 | 0.16 |
| θPM,1 | 181.9° | 180.0° |
| Br,1 | 1.09 | 0.90 | 1.10 | 0.91 |
| θr,1 | 85.4 | 79.6 | 85.2 | 79.6 |
| Bg,1 | 1.10 | 0.91 | 1.10 | 0.90 |
| θg,1 | 93.0 | 89.1 | 93.5 | 89.7 |
Table 5.
Torque calculation using different methods.
Table 5.
Torque calculation using different methods.
| Parameter | Value |
|---|
| is | 9.4 Arms |
| θi | 60° |
| P | 4 |
| μ0 | 4π × 10−7 |
| g | 0.3 mm |
| rg | 47.4 mm |
| lstk | 150 mm |
| Motor type | SynRM | PMASynRM |
| Method | Full FEA | Proposed | Full FEA | Proposed |
| ksat | 0.30 | 0.30 | 0.30 | 0.30 |
| Bs,1 | 1.16 T | 1.16 T | 1.16 T | 1.16 T |
| Bg,1 | NaN | NaN | 0.89 T | 0.90 T |
| θgs,1 | 59.1° | 59.7° |
| Br,1 | 0.90 T | 0.91 T | NaN | NaN |
| θrs,1 | 49.6° | 49.6° |
| T1 | 27.9 Nm | 28.4 Nm | 31.3 Nm | 31.8 Nm |
| Torque error | 1.8% | 1.6% |
Table 6.
Air gap flux density caused by the barrier effect.
Table 6.
Air gap flux density caused by the barrier effect.
| θi | Br,1 | θr,1 |
|---|
| 0 | 1.09 | 90.0 |
| 30 | 1.05 | 85.4 |
| 60 | 0.91 | 79.6 |
| 90 | 0.23 | 0.0 |
Table 7.
Quantitative comparison of the average torque results under different currents.
Table 7.
Quantitative comparison of the average torque results under different currents.
| Average Torque (Nm) | Proposed Calculation | FEA | Experiment (300 rpm) | Experiment (1200 rpm) |
|---|
| Rated current | 50%/75%/100% | 50%/75%/100% | 50%/75%/100% | 50%/75%/100% |
| θi | 30° | 11.2/17.0/23.8 | 10.7/17.4/23.2 | 10.0/16.6/23.1 | 10.2/16.8/23.3 |
| 35° | 12.0/18.5/26.3 | 11.6/19.0/25.6 | 10.7/18.0/25.3 | 11.0/18.2/25.4 |
| 40° | 12.8/19.9/28.3 | 12.4/20.4/27.6 | 11.4/19.4/27.5 | 11.5/19.4/27.3 |
| 45° | 13.2/21.1/30.0 | 12.8/21.5/29.1 | 11.8/20.4/28.8 | 11.7/20.3/28.8 |
| 50° | 13.1/21.9/31.1 | 13.0/22.3/30.5 | 11.8/20.9/30.1 | 11.6/20.8/30.0 |
| 55° | 12.7/22.4/31.9 | 12.6/22.5/31.1 | 11.6/21.1/30.7 | 11.2/20.8/30.3 |
| 60° | 12.0/22.1/31.8 | 11.7/21.9/31.3 | 10.9/20.6/30.4 | 10.5/20.3/29.7 |


 ,
, 




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


