
ELM-Based Adaptive Practical Fixed-Time Voltage Regulation in Wireless Power Transfer System




Abstract
1. Introduction
- (1)
- A fixed time voltage regulation of the closed-loop WPT-buck system is guaranteed without singularity, which, to the best of our knowledge, is the first time to study the voltage regulation issue for WPT-buck system in a fixed time horizon.
- (2)
- For the adopted ELM, not only is the training process eliminated, but the lumped uncertainty bound is learned in real-time via an ELM structure with only output measurements, which ideally alleviates the requirement of disturbance information in traditional SMC designs.
- (3)
- The fixed time convergence of system states, sliding variable, and output weights of ELM has been rigorously proved based on Lyapunov second theory.
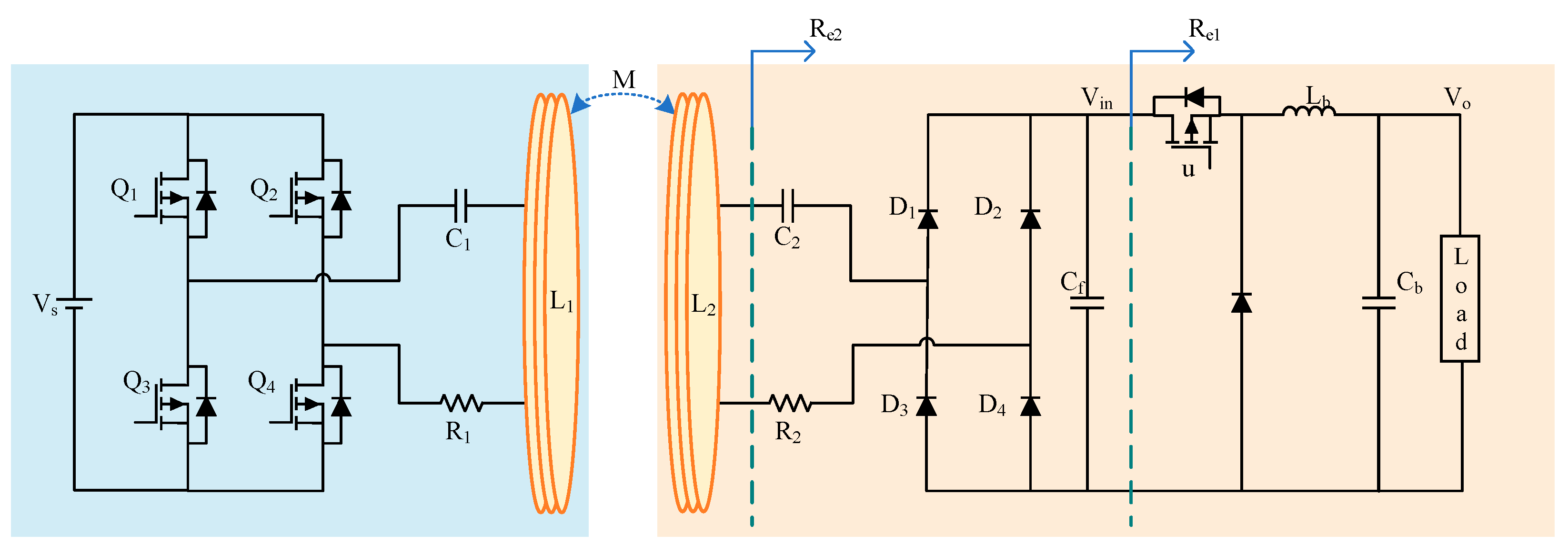
2. Plant Modelling
3. Brief Review of ELM
4. Controller Design
4.1. Notations and Lemmas
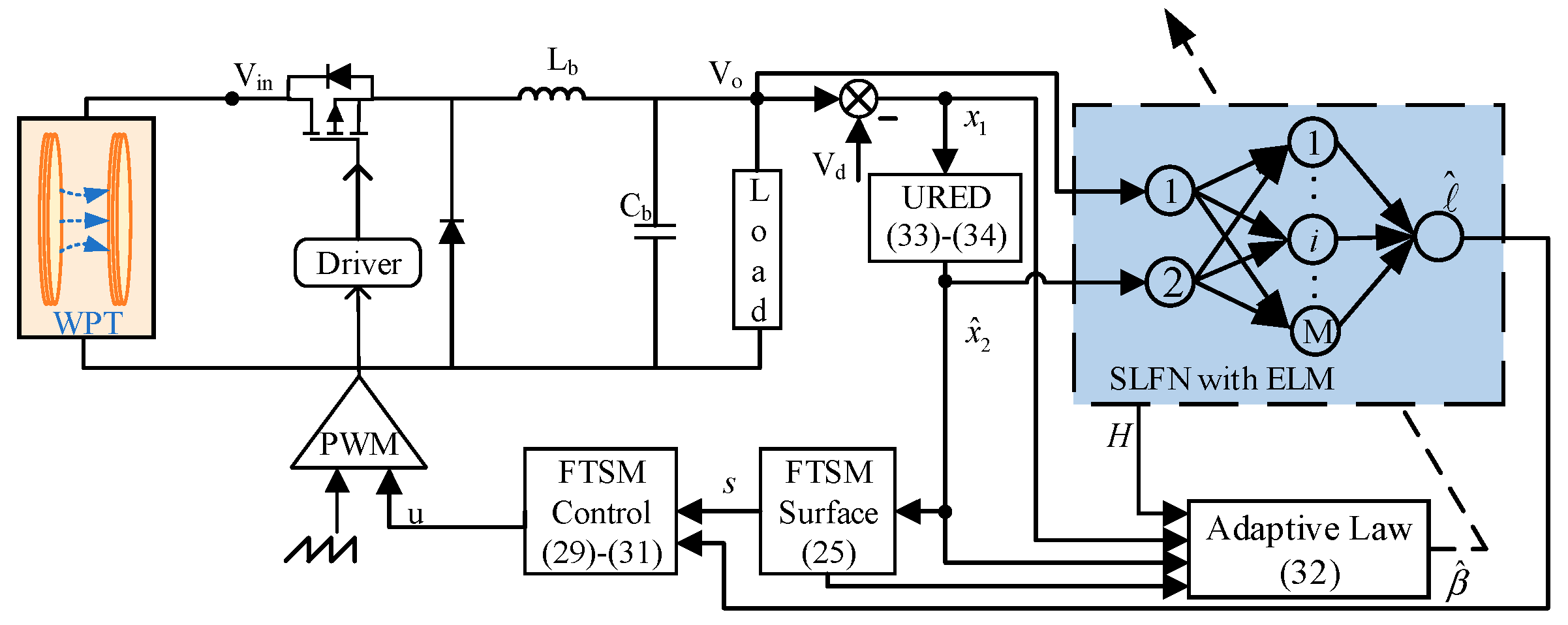
4.2. Controller Design
4.3. Stability Analysis
- (i)
- In the region , we have , and
- (ii)
- In the region , we have if . It can be verified that the sliding surface (24) is still an attractor. Furthermore, when , the control law can be reformulated as:
4.4. Parameter Selections
- (1)
- Selection of,: The control gains , in (24) are responsible for the convergence rate of the error states in sliding motion. The larger the value for and the smaller the value for , the faster the convergence rate for the error states. However, too large a value for or too small a value for will incur overlarge control amplitude, overshoot, and even incur instability of the closed-loop system. A trade-off between convergence rate and stability should be taken into consideration when determining the values of and .
- (2)
- Selection of,: The powers and of sliding mode equations (24) govern the dynamic of sliding motion via tunning the convergence rate when the error states are far away or close to the predefined error residual set. A faster convergence rate can be guaranteed with large values of and . However, too large a value is of less help for improving the dynamic response.
- (3)
- Selection of,,: The parameters , , in (30) are two control gains and power in reaching motion which are adopted to fasten the convergence rate of the sliding variable. Increasing the value of , , and will improve the tracking rate and response rate but at the cost of introducing high-frequency measurement noises to the system.
- (4)
- Selection of,,,: The parameter in (30) is utilized to cancel the estimator discrepancy of the ELM estimator. A larger value will bring strong robustness but introduce large control amplitude as well. The parameters and in (31) are adaptation gain and damping coefficient for the adaptation process of output weight of ELM estimator. A larger value of and a smaller value of lead to a faster convergence rate of the estimation. However, increasing also amplifies the measurement noises, which reversely deteriorates the tracking performance. Too large a value of will also inevitably decrease the bandwidth of the system, resulting in a deteriorated estimation performance. The larger number of hidden nodes leads to precise estimation results of the ELM estimator, thus resulting in smaller tracking error, but too many nodes also increase the computation burden for real-time implementation.
5. Experimental Study
5.1. Experiment Configuration
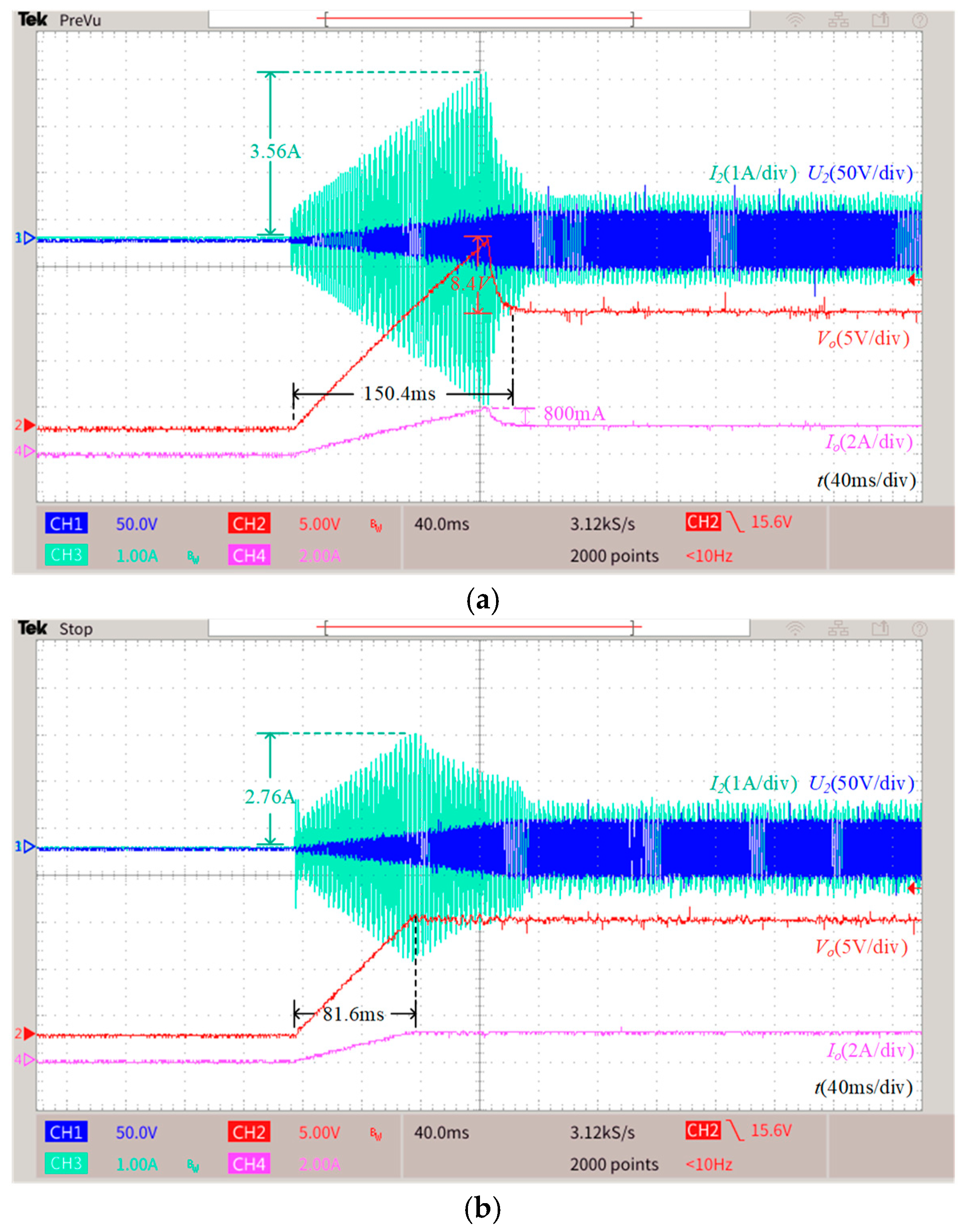
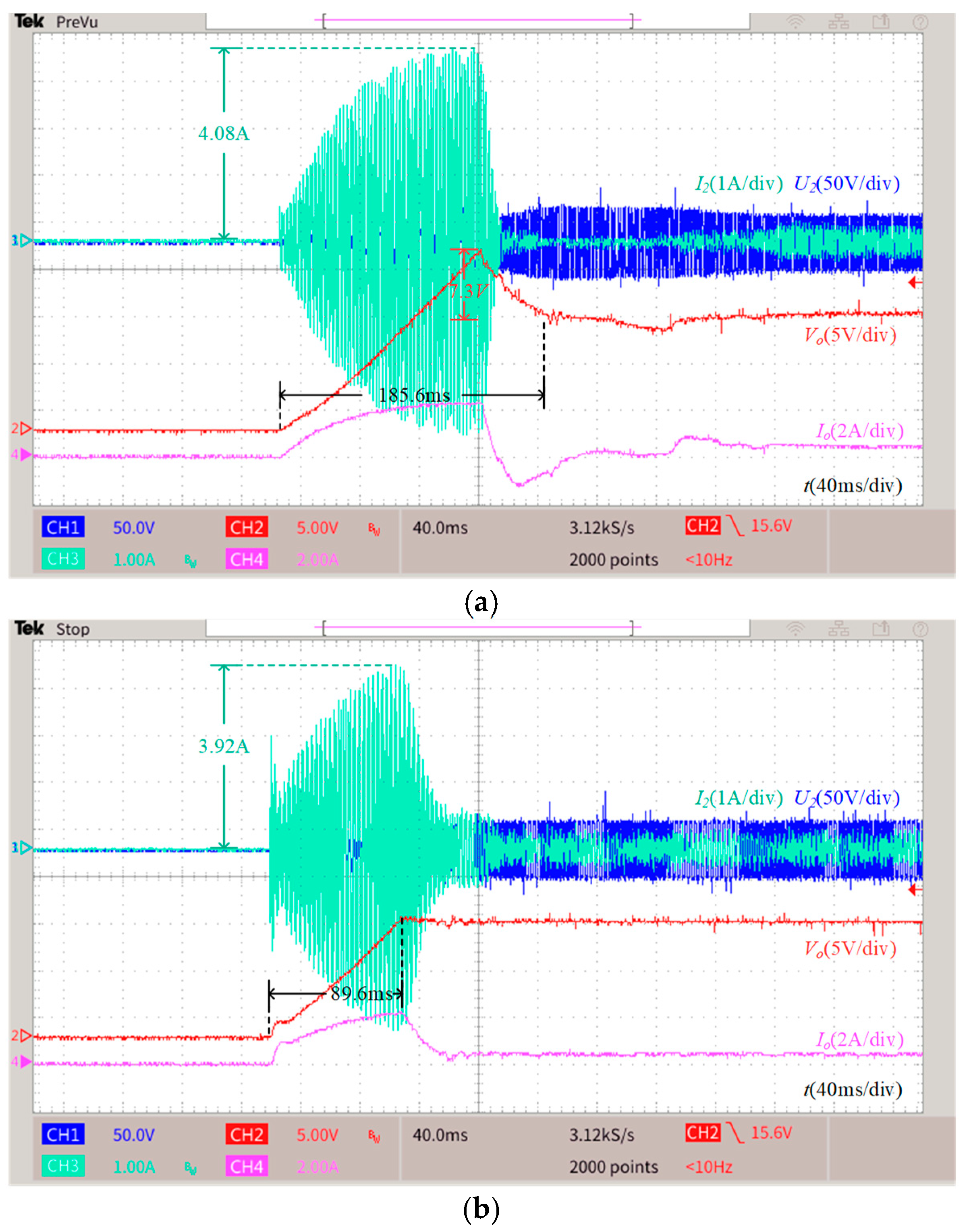
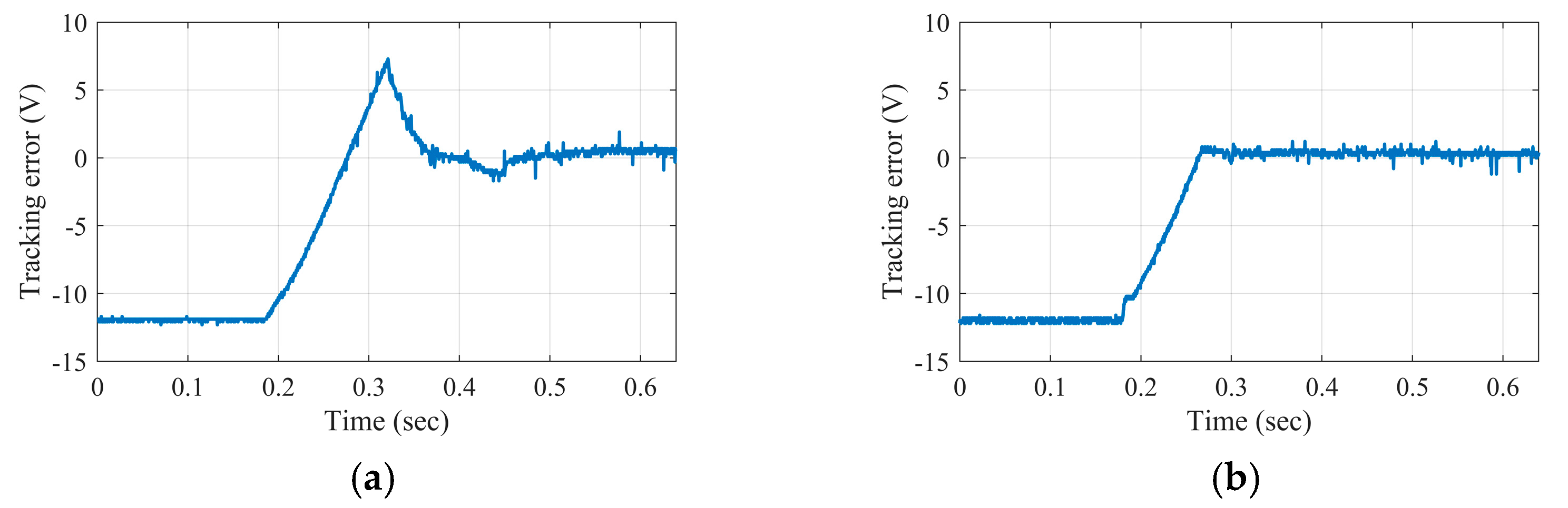
5.2. Case 1: The Start-Up Response
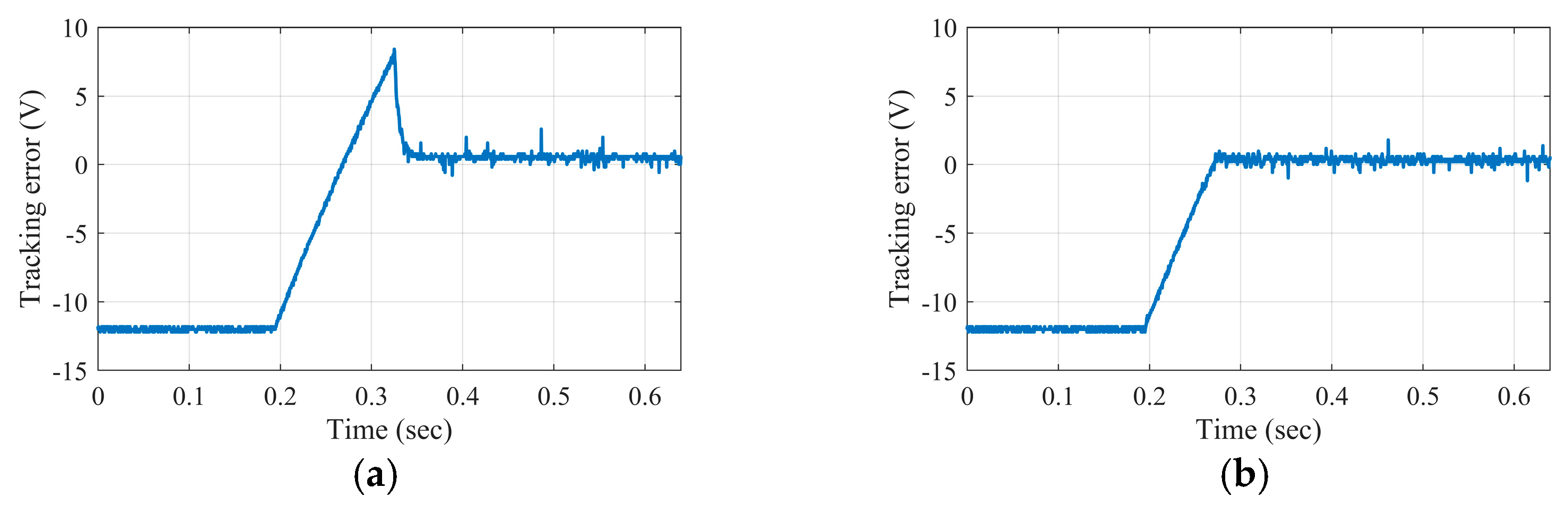
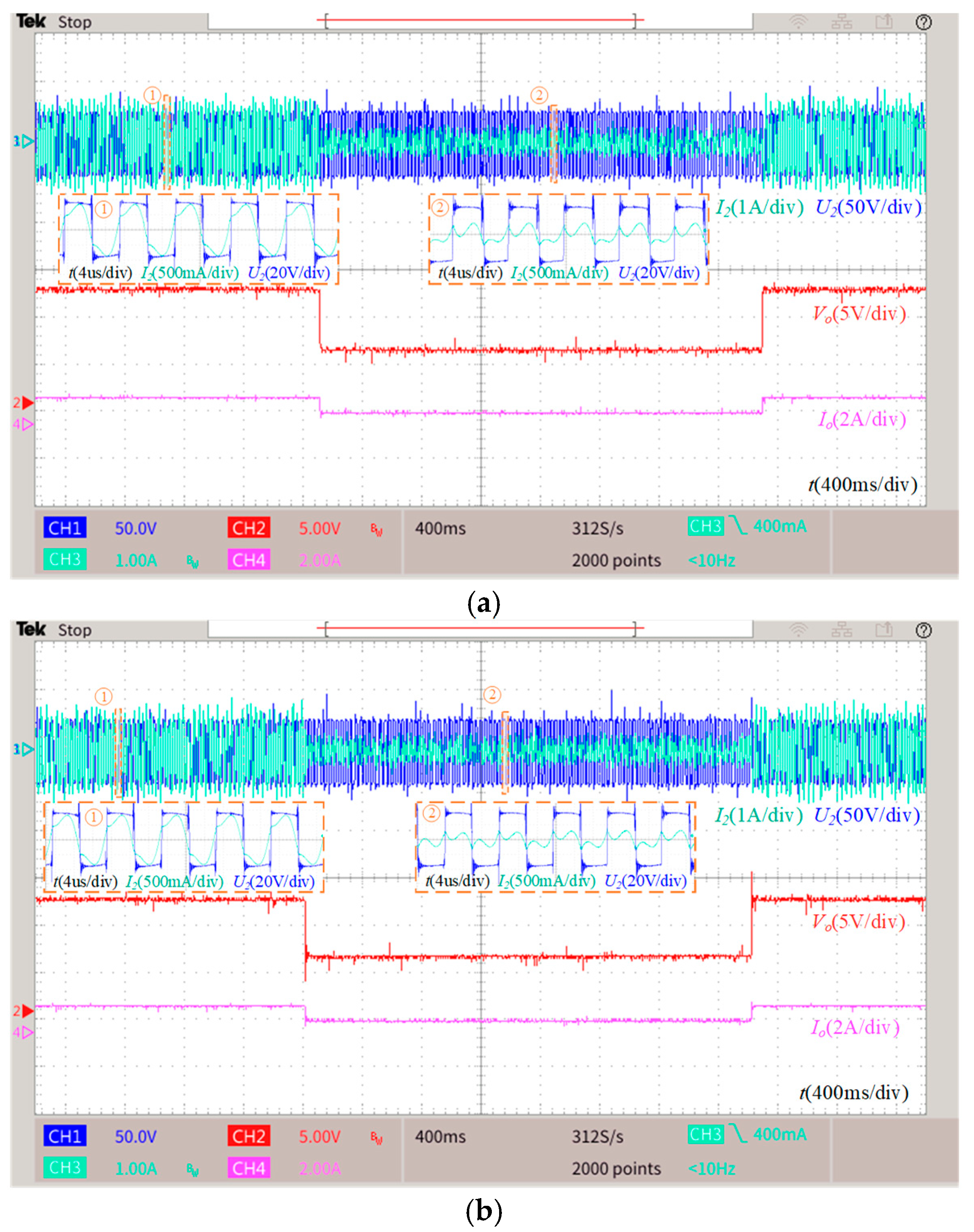
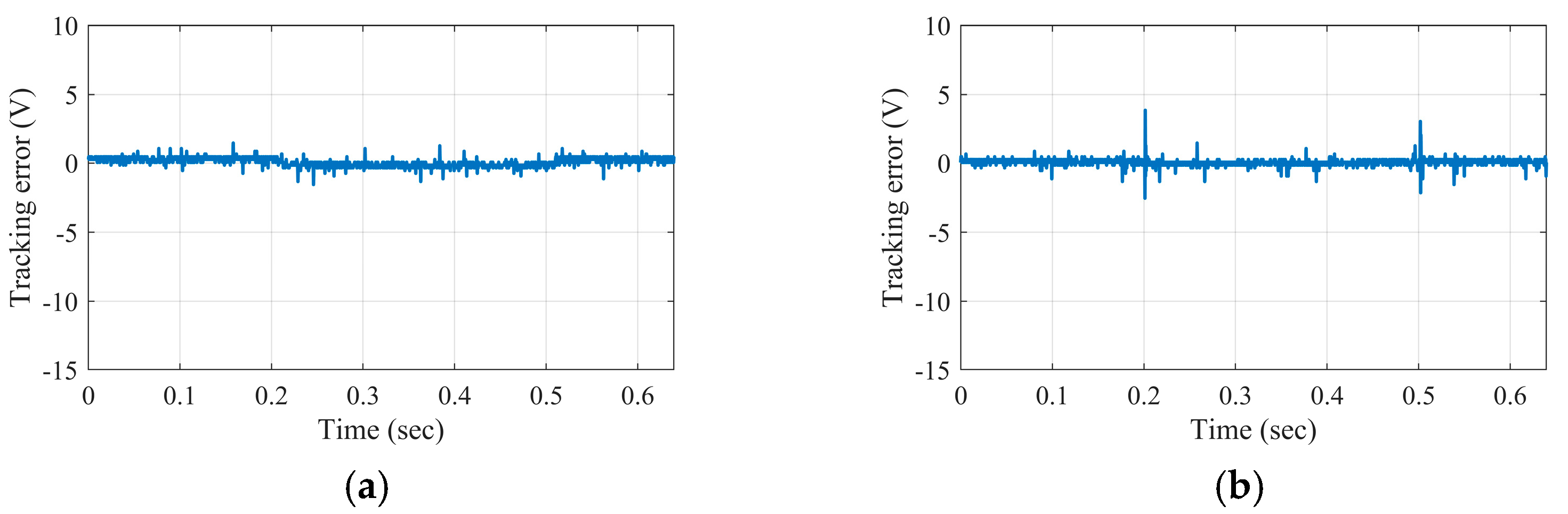
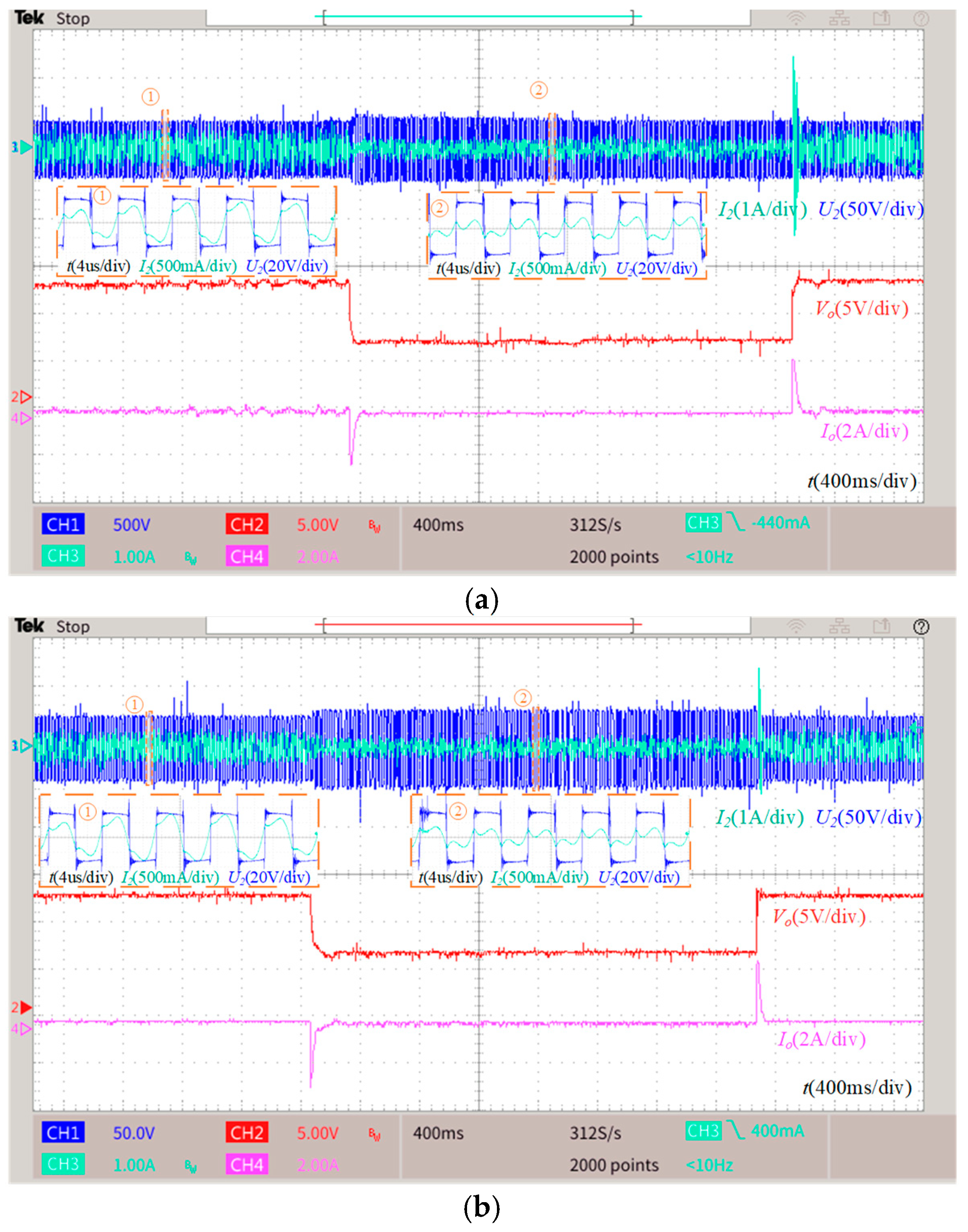
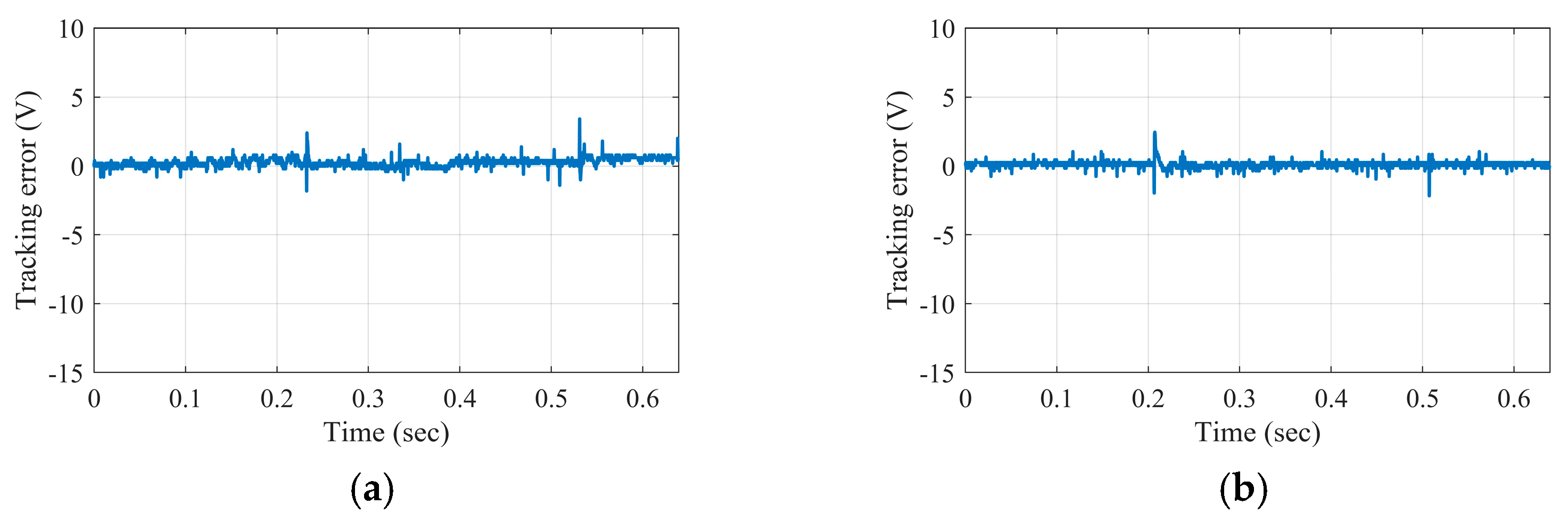
5.3. Case 2: The Set-Point Tracking Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Covic, G.A.; Boys, J.T. Inductive Power Transfer. Proc. IEEE 2013, 101, 1276–1289. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Zhang, Z. Flexible Induction Heating Using Magnetic Resonant Coupling. IEEE Trans. Ind. Electron. 2017, 64, 1982–1992. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Jiang, C.; Liu, W.; Lam, W.H. High-Order Compensated Wireless Power Transfer for Dimmable Metal Halide Lamps. IEEE Trans. Power Electron. 2020, 35, 6269–6279. [Google Scholar] [CrossRef]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Liu, W.; Wang, H.; Hua, Z. Wireless Power and Drive Transfer Using Orthogonal Bipolar Couplers and Separately Excited Modulation. IEEE Trans. Ind. Electron. 2022, 69, 3492–3502. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Hua, Z.; Hongliang, P. Compact Wireless Motor Drive Using Orthogonal Bipolar Coils for Coordinated Operation of Robotic Arms. IEEE Trans. Magn. 2022, 58, 8200608. [Google Scholar] [CrossRef]
- Han, W.; Chau, K.T.; Hua, Z.; Hongliang, P. An Integrated Wireless Motor System Using Laminated Magnetic Coupler and Commutative-Resonant Control. IEEE Trans. Ind. Electron. 2022, 69, 4342–4352. [Google Scholar] [CrossRef]
- Jiang, J.; Song, K.; Li, Z.; Zhu, C.; Zhang, Q. System Modeling and Switching Control Strategy of Wireless Power Transfer System. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1295–1305. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, W.; Kiratipongvoot, S.; Tan, S.-C.; Hui, S.Y.R. Dynamic Improvement of Series–Series Compensated Wireless Power Transfer Systems Using Discrete Sliding Mode Control. IEEE Trans. Power Electron. 2018, 33, 6351–6360. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Farsizadeh, H.; Tavana, M.-R.; Khooban, M.H. A Novel Deep Learning Controller for DC–DC Buck–Boost Converters in Wireless Power Transfer Feeding CPLs. IEEE Trans. Ind. Electron. 2021, 68, 6379–6384. [Google Scholar] [CrossRef]
- Liu, W.; Kim, J.-M.; Wang, C.; Im, W.-S.; Liu, L.; Xu, H. Power Converters Based Advanced Experimental Platform for Integrated Study of Power and Controls. IEEE Trans. Ind. Inform. 2018, 14, 4940–4952. [Google Scholar] [CrossRef]
- Xu, Q.; Yan, Y.; Zhang, C.; Dragicevic, T.; Blaabjerg, F. An Offset-Free Composite Model Predictive Control Strategy for DC/DC Buck Converter Feeding Constant Power Loads. IEEE Trans. Power Electron. 2019, 35, 5331–5342. [Google Scholar] [CrossRef]
- Olalla, C.; Queinnec, I.; Leyva, R.; El Aroudi, A. Robust Optimal Control of Bilinear DC–DC Converters. Control Eng. Pract. 2011, 19, 688–699. [Google Scholar] [CrossRef]
- Boukerdja, M.; Chouder, A.; Hassaine, L.; Bouamama, B.O.; Issa, W.; Louassaa, K.H. Based Control of a DC/DC Buck Converter Feeding a Constant Power Load in Uncertain DC Microgrid System. ISA Trans. 2020, 105, 278–295. [Google Scholar] [CrossRef] [PubMed]
- Hafiz, F.; Swain, A.; Mendes, E.M.; Aguirre, L.A. Multiobjective Evolutionary Approach to Grey-Box Identification of Buck Converter. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 2016–2028. [Google Scholar] [CrossRef]
- Bouchama, Z.; Khatir, A.; Benaggoune, S.; Harmas, M.N. Design and Experimental Validation of an Intelligent Controller for DC–DC Buck Converters. J. Frankl. Inst. 2020, 357, 10353–10366. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Hu, Y.; Wang, H.; He, S.; Zheng, J.; Ping, Z.; Shao, K.; Cao, Z.; Man, Z. Adaptive Tracking Control of an Electronic Throttle Valve Based on Recursive Terminal Sliding Mode. IEEE Trans. Veh. Technol. 2021, 70, 251–262. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H. Robust Tracking Control for Vehicle Electronic Throttle Using Adaptive Dynamic Sliding Mode and Extended State Observer. Mech. Syst. Signal Process. 2020, 135, 106375. [Google Scholar] [CrossRef]
- Tan, S.-C.; Lai, Y.-M.; Tse, C.-K. Sliding Mode Control of Switching Power Converters: Techniques and Implementation; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Oucheriah, S.; Guo, L. PWM-Based Adaptive Sliding-Mode Control for Boost DC–DC Converters. IEEE Trans. Ind. Electron. 2012, 60, 3291–3294. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Ha, D. A Sliding-Mode Duty-Ratio Controller for DC/DC Buck Converters With Constant Power Loads. IEEE Trans. Ind. Appl. 2014, 50, 1448–1458. [Google Scholar] [CrossRef]
- Komurcugil, H. Adaptive Terminal Sliding-Mode Control Strategy for DC–DC Buck Converters. ISA Trans. 2012, 51, 673–681. [Google Scholar] [CrossRef]
- Komurcugil, H. Non-Singular Terminal Sliding-Mode Control of DC–DC Buck Converters. Control Eng. Pract. 2013, 21, 321–332. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Yang, J.; Wu, B.; Li, Q. Finite-Time Disturbance Observer Based Non-Singular Terminal Sliding-Mode Control for Pulse Width Modulation Based DC–DC Buck Converters with Mismatched Load Disturbances. IET Power Electron. 2016, 9, 1995–2002. [Google Scholar] [CrossRef]
- Repecho, V.; Masclans, N.; Biel, D. A Comparative Study of Terminal and Conventional Sliding-Mode Startup Peak Current Controls for a Synchronous Buck Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 197–205. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Trans. Automat. Contr. 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Zuo, Z. Non-singular Fixed-time Terminal Sliding Mode Control of Non-linear Systems. IET Control Theory Appl. 2015, 9, 545–552. [Google Scholar] [CrossRef]
- Li, H.; Cai, Y. On SFTSM Control with Fixed-Time Convergence. IET Control Theory Appl. 2017, 11, 766–773. [Google Scholar] [CrossRef]
- Mahdavi, J.; Nasiri, M.R.; Agah, A.; Emadi, A. Application of Neural Networks and State-Space Averaging to DC/DC PWM Converters in Sliding-Mode Operation. IEEE/ASME Trans. Mechatron. 2005, 10, 60–67. [Google Scholar] [CrossRef]
- Rubaai, A.; Ofoli, A.R.; Burge, L.; Garuba, M. Hardware Implementation of an Adaptive Network-Based Fuzzy Controller for DC–DC Converters. IEEE Trans. Ind. Appl. 2005, 41, 1557–1565. [Google Scholar] [CrossRef]
- Wai, R.-J.; Shih, L.-C. Adaptive Fuzzy-Neural-Network Design for Voltage Tracking Control of a DC–DC Boost Converter. IEEE Trans. Power Electron. 2012, 27, 2104–2115. [Google Scholar] [CrossRef]
- Heydari, A. Optimal Switching of DC–DC Power Converters Using Approximate Dynamic Programming. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 586–596. [Google Scholar] [CrossRef]
- Hajihosseini, M.; Andalibi, M.; Gheisarnejad, M.; Farsizadeh, H.; Khooban, M.-H. DC/DC Power Converter Control-Based Deep Machine Learning Techniques: Real-Time Implementation. IEEE Trans. Power Electron. 2020, 35, 9971–9977. [Google Scholar] [CrossRef]
- Dong, W.; Li, S.; Fu, X.; Li, Z.; Fairbank, M.; Gao, Y. Control of a Buck DC/DC Converter Using Approximate Dynamic Programming and Artificial Neural Networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1760–1768. [Google Scholar] [CrossRef]
- Wang, J.; Luo, W.; Liu, J.; Wu, L. Adaptive Type-2 FNN-Based Dynamic Sliding Mode Control of DC–DC Boost Converters. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2246–2257. [Google Scholar] [CrossRef]
- Rojas-Dueñas, G.; Riba, J.-R.; Moreno-Eguilaz, M. A Deep Learning-Based Modeling of a 270 V to 28 V DC–DC Converter Used in More Electric Aircrafts. IEEE Trans. Power Electron. 2022, 37, 509–518. [Google Scholar] [CrossRef]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme Learning Machine: Theory and Applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Han, F.; Huang, D.-S. Improved Extreme Learning Machine for Function Approximation by Encoding a Priori Information. Neurocomputing 2006, 69, 2369–2373. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H.; Cao, Z.; Zheng, J.; Ping, Z.; Chen, L.; Jin, X. Extreme-Learning-Machine-Based FNTSM Control Strategy for Electronic Throttle. Neural Comput. Applic. 2020, 14507–14518. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H.; Yazdani, A.; Man, Z. Adaptive Full Order Sliding Mode Control for Electronic Throttle Valve System with Fixed Time Convergence Using Extreme Learning Machine. Neural Comput. Applic. 2021, 1–13. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, H.; Ma, M.; Yu, M.; Yazdani, A.; Chen, L. Active Front Steering-Based Electronic Stability Control for Steer-by-Wire Vehicles via Terminal Sliding Mode and Extreme Learning Machine. IEEE Trans. Veh. Technol. 2020, 69, 14713–14726. [Google Scholar] [CrossRef]
- Dai, X.; Li, X.; Li, Y.; Hu, A.P. Impedance-Matching Range Extension Method for Maximum Power Transfer Tracking in IPT System. IEEE Trans. Power Electron. 2018, 33, 4419–4428. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Distributed Robust Finite-Time Nonlinear Consensus Protocols for Multi-Agent Systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Cruz-Zavala, E.; Moreno, J.A.; Fridman, L.M. Uniform Robust Exact Differentiator. IEEE Trans. Autom. Control 2011, 56, 2727–2733. [Google Scholar] [CrossRef]
- Sang-Hoon, K. Electric Motor Control; Elsevier: Amsterdam, The Netherlands, 2017; ISBN 978-0-12-812138-2. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| , , , | , 42.7, 42.7, (nF) |
| , , , | 100, 82, 82, 16 () |
| , , | 0.135, 0.133, 10 () |
| 32 (V) | |
| , | 20, 85 () |
| Controllers | Parameters |
|---|---|
| Proposed control | 100, , , , , , , , , |
| PI control | , |
| Misalignment (%) | 0 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
|---|---|---|---|---|---|---|---|---|---|
| RMSE (V) | 0.2904 | 0.3545 | 0.3855 | 0.3220 | 0.3335 | 0.3840 | 0.3059 | 0.3320 | 0.2485 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Zhang, B.; Hu, W.; Han, W. ELM-Based Adaptive Practical Fixed-Time Voltage Regulation in Wireless Power Transfer System. Energies 2023, 16, 1016. https://doi.org/10.3390/en16031016
Hu Y, Zhang B, Hu W, Han W. ELM-Based Adaptive Practical Fixed-Time Voltage Regulation in Wireless Power Transfer System. Energies. 2023; 16(3):1016. https://doi.org/10.3390/en16031016
Chicago/Turabian StyleHu, Youhao, Bowang Zhang, Weikang Hu, and Wei Han. 2023. "ELM-Based Adaptive Practical Fixed-Time Voltage Regulation in Wireless Power Transfer System" Energies 16, no. 3: 1016. https://doi.org/10.3390/en16031016
APA StyleHu, Y., Zhang, B., Hu, W., & Han, W. (2023). ELM-Based Adaptive Practical Fixed-Time Voltage Regulation in Wireless Power Transfer System. Energies, 16(3), 1016. https://doi.org/10.3390/en16031016