


Temperature Field Analysis and Cooling Structure Optimization for Integrated Permanent Magnet In-Wheel Motor Based on Electromagnetic-Thermal Coupling



Abstract
1. Introduction
2. Temperature Field Analysis of Integrated PM In-Wheel Motor
2.1. Prototype
2.2. Magnetic Field Prediction
2.3. Loss Computation
2.4. Temperature Field Analysis
3. Impact of Cooling Structure on Heat Dissipation of PM In-Wheel Motor
4. Optimization Design of Waterway Structure Parameters
4.1. Chaotic Mapping Ant Colony Algorithm Based on Metropolis Criterion
4.2. Optimization Results and Analysis
5. Conclusions
- (1)
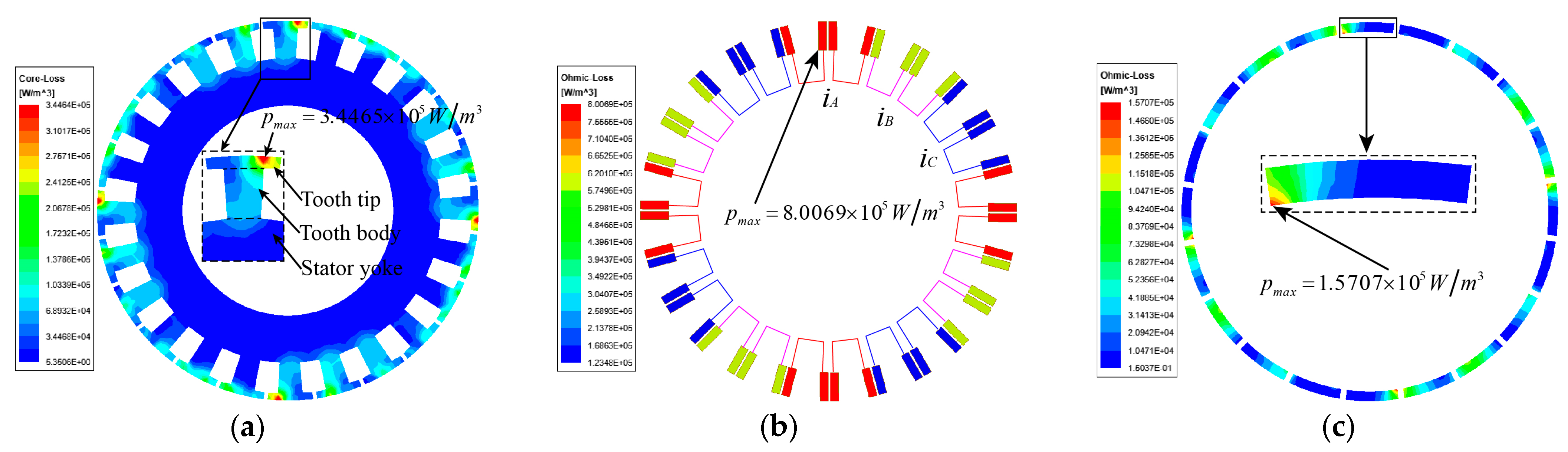
- The heat generation, temperature field distribution and cooling structure optimization of the integrated PM-IWM are researched in this paper. Firstly, the magnetic flux density distribution of the PM, air-gap and stator core are compared and calculated by using the subdomain model and FE numerical model. The space-time distribution of stator core loss, winding copper loss and PM eddy current loss is obtained according to the Bertotti’s iron loss separation theory. The core loss is mainly concentrated between the stator teeth, the distribution of instantaneous copper loss is basically consistent with the winding layout, and there is a certain concentration of eddy current loss in some corresponding PM. Combined with the 3-D temperature simulation model, the temperature rise process and distribution of the main components are calculated. After the temperature rise tends to be stable, it can be seen that the winding copper is the largest, followed by the stator core, the PM and rotor yoke are relatively lower, and the peak temperatures are 131.24 °C, 130.14 °C, 88.01 °C and 87.55 °C, respectively.
- (2)
- The coolant flow velocity, pressure, CHTC and stator temperature distribution are analyzed based on the thermal-fluid coupled model and Ansoft Maxwell software simulation platform. The effects of the waterway structure parameters on the CHTC, pressure loss and peak temperature of stator are also clarified. It can be concluded that the CHTC is approximately proportional to the number of waterways, flow velocity and section width of waterway, and with the increase of the U-type fillet radii, it rises rapidly and then decreases slightly. The peak temperature of the stator decreases with the increase of number of waterways, flow velocity and section width of waterway, and decreases rapidly and then rises slowly with the increase of the U-type fillet radii. The comparison results show that the change of waterway structure parameters has a significant impact on the heat dissipation performance of IWM, in which the effect results also provide some guidance for its optimal design.
- (3)
- Taking the number of waterways, flow velocity, section width of waterway and fillet radii of U-type as design variables, the heat dissipation effect of the cooling system is optimized based on the proposed chaotic mapping ant colony algorithm with metropolis criterion. Moreover, the Pareto frontier distribution of the optimization target is obtained. After optimization, the waterway pressure loss decreases from 2.87 kPa to 2.62 kPa, reducing by 8.71%. The average CHTC is increased from 563.75 W/(m2·K) to 696.62 W/(m2·K), increasing by 23.57%. The peak temperature of the stator has decreased from 95.47 °C to 82.73 °C by 13.34%. In addition, the rise and peak temperature of key components such as winding copper, PM and rotor are reduced to varying degrees. The optimized waterway structure comprehensively improves the heat dissipation effect of the motor and the demagnetization risk in the PM. The research results can provide some theoretical and technical support for design and control of the integrated PM-IWM.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, X.Y.; Jiang, M.; Xiang, Z.X.; Quan, L.; Hua, W.; Cheng, M. Design and Optimization of a Flux-Modulated Permanent Magnet Motor Based on an Airgap-Harmonic-Orientated Design Methodology. IEEE Trans. Ind. Electron. 2020, 67, 5337–5348. [Google Scholar] [CrossRef]
- Yang, H.; Li, Y.; Lin, H.; Zhu, Z.Q.; Lyu, S.K. Principle Investigation and Performance Comparison of Consequent-Pole Switched Flux PM Machines. IEEE Trans. Transp. Electrif. 2020, 7, 766–778. [Google Scholar] [CrossRef]
- Hanic, A.; Zarko, D.; Hanic, Z. A Novel Method for No-Load Magnetic Field Analysis of Saturated Surface Permanent-Magnet Machines Using Conformal Mapping and Magnetic Equivalent Circuits. IEEE Trans. Energy Convers. 2015, 31, 740–749. [Google Scholar] [CrossRef]
- Hanic, A.; Zarko, D.; Kuhinek, D.; Hanic, Z. On-Load Analysis of Saturated Surface Permanent Magnet Machines Using Conformal Mapping and Magnetic Equivalent Circuits. IEEE Trans. Energy Convers. 2018, 33, 915–924. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.; Popescu, M.; Hawkins, D. An Improved Subdomain Model for Predicting Magnetic Field of Surface-Mounted Permanent Magnet Machines Accounting for Tooth-Tips. IEEE Trans. Magn. 2011, 47, 1693–1704. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q.; Staton, D.; Popescu, M.; Hawkins, D. Subdomain Model for Predicting Armature Reaction Field of Surface-Mounted Permanent-Magnet Machines Accounting for Tooth-Tips. IEEE Trans. Magn. 2011, 47, 812–822. [Google Scholar] [CrossRef]
- Oner, Y.; Zhu, Z.Q.; Wu, L.J.; Ge, X.; Zhan, H.; Chen, J.T. Analytical On-Load Subdomain Field Model of Permanent-Magnet Vernier Machines. IEEE Trans. Ind. Electron. 2016, 63, 4105–4117. [Google Scholar] [CrossRef]
- Liang, P.X.; Chai, F.; Chen, L.; Wang, Y.P. Analytical Prediction of No-Load Stator Iron Losses in Spoke-Type Permanent-Magnet Synchronous Machines. IEEE Trans. Energy Convers. 2017, 33, 252–259. [Google Scholar] [CrossRef]
- Khedda, Z.K.; Boughrara, K.; Dubas, F.; Kechroud, A. Analytical Prediction of Iron-Core Losses in Flux-Modulated Permanent-Magnet Synchronous Machines. IEEE Trans. Magn. 2019, 535, 6333112. [Google Scholar]
- Liang, P.X.; Tang, Y.; Chai, F.; Shen, K.; Liu, W.G. Calculation of the Iron losses in a Spoke-Type Permanent Magnet Synchronous In-Wheel Motor for Electric Vehicles by Utilizing the Bertotti Model. IEEE Trans. Magn. 2019, 55, 8202407. [Google Scholar] [CrossRef]
- Tao, D.; Zhou, K.L.; Lv, F.; Dou, Q.; Wu, J.; Sun, Y.; Zou, J. Magnetic Field Characteristics and Stator Core Losses of High-Speed Permanent Magnet Synchronous Motors. Energies 2020, 13, 535. [Google Scholar] [CrossRef]
- Ji, W.; Ni, F.; Gao, D.; Luo, S.; Lv, Q.; Lv, D. Electromagnetic Design of High-Power and High-Speed Permanent Magnet Synchronous Motor Considering Loss Characteristics. Energies 2021, 14, 3622. [Google Scholar] [CrossRef]
- Li, B.; Yan, L.; Cao, W. An Improved LPTN Method for Determining the Maximum Winding Temperature of a U-Core Motor. Energies 2020, 13, 1566. [Google Scholar] [CrossRef]
- Chen, H.; Wang, K.; Yan, W.J.; Orabi, M.; Parspour, N. Temperature Analysis of Switched Reluctance Motor Based on Equivalent Heat Circuit Method. IEEE Trans. Appl. Supercond. 2021, 31, 1–4. [Google Scholar] [CrossRef]
- Tong, W.M.; Sun, R.L.; Li, S.Q.; Tang, R.Y. Loss and Thermal Analysis for High-Speed Amorphous Metal PMSMs Using 3-D Electromagnetic-thermal Bi-Directional Coupling. IEEE Trans. Energy Convers. 2021, 36, 2839–2849. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, L.; Chai, F.; Chen, T.C. Thermal Modeling and Analysis of Active and End Windings of Enclosed Permanent-Magnet Synchronous In-Wheel Motor Based on Multi-Block Method. IEEE Trans. Energy Convers. 2020, 35, 85–94. [Google Scholar] [CrossRef]
- Jia, M.; Hu, J.; Xiao, F.; Yang, Y.; Deng, C. Modeling and Analysis of Electromagnetic Field and Temperature Field of Permanent-Magnet Synchronous Motor for Automobiles. Electronics 2021, 10, 2173. [Google Scholar] [CrossRef]
- Chen, Q.P.; Shao, H.; Huang, J.L.; Sun, H.Y.; Xie, J.C. Analysis of Temperature Field and Water Cooling of Outer Rotor In-Wheel Motor for Electric Vehicle. IEEE Access 2019, 7, 140142–140151. [Google Scholar] [CrossRef]
- Liu, X.M.; Yu, H.T.; Shi, Z.C.; Xia, T.; Hu, M.Q. Electromagnetic-Fluid-Thermal Field Calculation and Analysis of a Permanent Magnet Linear Motor. Appl. Therm. Eng. 2018, 129, 802–811. [Google Scholar] [CrossRef]
- Luo, L.; Chang, J.J.; Wu, J.L.; Zhu, B.; Zheng, M.Y.; Zhang, N. Design and Analysis of a Water-Cooling System in a New Yokeless and Segmented Armature Axial In-Wheel Motor for Electric Vehicles. J. Therm. Sci. Eng. Appl. 2021, 13, 051015. [Google Scholar] [CrossRef]
- Liang, P.X.; Chai, F.; Shen, K.; Liu, W.G. Water Jacket and Slot Optimization of a Water-Cooling Permanent Magnet Synchronous In-Wheel Motor. IEEE Trans. Ind. Appl. 2021, 57, 2431–2439. [Google Scholar] [CrossRef]
- Lu, Q.F.; Zhang, X.M.; Chen, Y.; Huang, X.Y.; Ye, Y.Y.; Zhu, Z.Q. Modeling and Investigation of Thermal Characteristics of a Water-Cooled Permanent-Magnet Linear Motor. IEEE Trans. Ind. Appl. 2014, 51, 2086–2096. [Google Scholar] [CrossRef]
- Ge, B.J.; Zhang, J.; Tao, D.J. Temperature Prediction and Cooling Structure Optimization of Explosion-Proof High Pressure Water-Cooled Double Speed Motor. Energy Rep. 2022, 8, 3891–3901. [Google Scholar]
- Chen, J.S.; Gong, P.H.; Liu, Y.S.; Zheng, X.Y.; Ren, F. Optimization of Hot Stamping Cooling System Using Segmented Model. Int. J. Adv. Manuf. Technol. 2017, 93, 1357–1365. [Google Scholar] [CrossRef]
- Zhu, G.J.; Li, L.; Mei, Y.H.; Liu, T.; Xue, M. Design and Analysis of a Self-Circulated Oil Cooling System Enclosed in Hollow Shafts for Axial-Flux PMSMs. IEEE Trans. Veh. Technol. 2022, 71, 4879–4888. [Google Scholar] [CrossRef]
- Roy, P.; Bourgault, A.J.; Towhidi, M.; Song, P.Z.; Li, Z.; Mukundan, S.; Rankin, G.; Kar, N.C. An Algorithm for Effective Design and Performance Investigation of Active Cooling System for Required Temperature and Torque of PM Traction Motor. IEEE Trans. Magn. 2020, 57, 8201507. [Google Scholar] [CrossRef]
- Li, Y.S.; Li, C.B.; Garg, A.; Gao, L.; Li, W. Heat Dissipation Analysis and Multi-Objective Optimization of a Permanent Magnet Synchronous Motor Using Surrogate Assisted Method. Case Stud. Therm. Eng. 2021, 27, 101203. [Google Scholar] [CrossRef]
- Bertotti, G. General Properties of Power Losses in Soft Ferromagnetic Materials. IEEE Trans. Magn. 1988, 24, 621–630. [Google Scholar] [CrossRef]
- Gai, Y.; Kimiabeigi, M.; Chong, Y.C.; Widmer, J.D.; Deng, X.; Popescu, M.; Goss, J.; Staton, D.A.; Steven, A. Cooling of Automotive Traction Motors: Schemes, Examples, and Computation Methods. IEEE Trans. Ind. Electron. 2018, 66, 1681–1692. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant Colony Optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Values | Parameters | Symbol | Values |
|---|---|---|---|---|---|
| Pole/Slot number | 2p/Ns | 20/24 | Stator bore radius | Rs | 145 mm |
| Magnet thickness | hm | 12 mm | Slot top radius | Rst | 140 mm |
| Active length | la | 110 mm | Slot bottom radius | Rsb | 115 mm |
| Rated current | I | 14 A | Slot width angle | lsa | 8.5° |
| Pole-arc/pole-pitch | σp | 0.86 | Slot opening width angle | loa | 2.7° |
| Inner rotor radius | Rm | 146.5 mm | Magnet remanence | Br | 0.96 T |
| Boundary Location | Constraint Equation |
|---|---|
| Rotor yoke surface | |
| Interface between PM and air-gap | |
| Interface between air-gap and slot opening | |
| Interface between slot opening and slot | |
| Bottom surface of slot |
| Design Variable | Symbol | Initial Value | Constraint Condition |
|---|---|---|---|
| Number of waterways | nw | 20 | 16 < nw < 26 |
| Coolant flow velocity | vin | 0.50 m/s | 0.20 < vin < 1.20 |
| section width of waterway | bw | 14.67 mm | 10 < bw < 18 |
| fillet radii of U-type | Rc | 2 mm | 0 < Rw < 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Li, R.; Zhao, Z.; Liang, K.; Xu, W.; Zhao, P. Temperature Field Analysis and Cooling Structure Optimization for Integrated Permanent Magnet In-Wheel Motor Based on Electromagnetic-Thermal Coupling. Energies 2023, 16, 1527. https://doi.org/10.3390/en16031527
Wang Q, Li R, Zhao Z, Liang K, Xu W, Zhao P. Temperature Field Analysis and Cooling Structure Optimization for Integrated Permanent Magnet In-Wheel Motor Based on Electromagnetic-Thermal Coupling. Energies. 2023; 16(3):1527. https://doi.org/10.3390/en16031527
Chicago/Turabian StyleWang, Qiang, Rui Li, Ziliang Zhao, Kui Liang, Wei Xu, and Pingping Zhao. 2023. "Temperature Field Analysis and Cooling Structure Optimization for Integrated Permanent Magnet In-Wheel Motor Based on Electromagnetic-Thermal Coupling" Energies 16, no. 3: 1527. https://doi.org/10.3390/en16031527
APA StyleWang, Q., Li, R., Zhao, Z., Liang, K., Xu, W., & Zhao, P. (2023). Temperature Field Analysis and Cooling Structure Optimization for Integrated Permanent Magnet In-Wheel Motor Based on Electromagnetic-Thermal Coupling. Energies, 16(3), 1527. https://doi.org/10.3390/en16031527