

Multi-Agent-Based Controller for Microgrids: An Overview and Case Study


Abstract
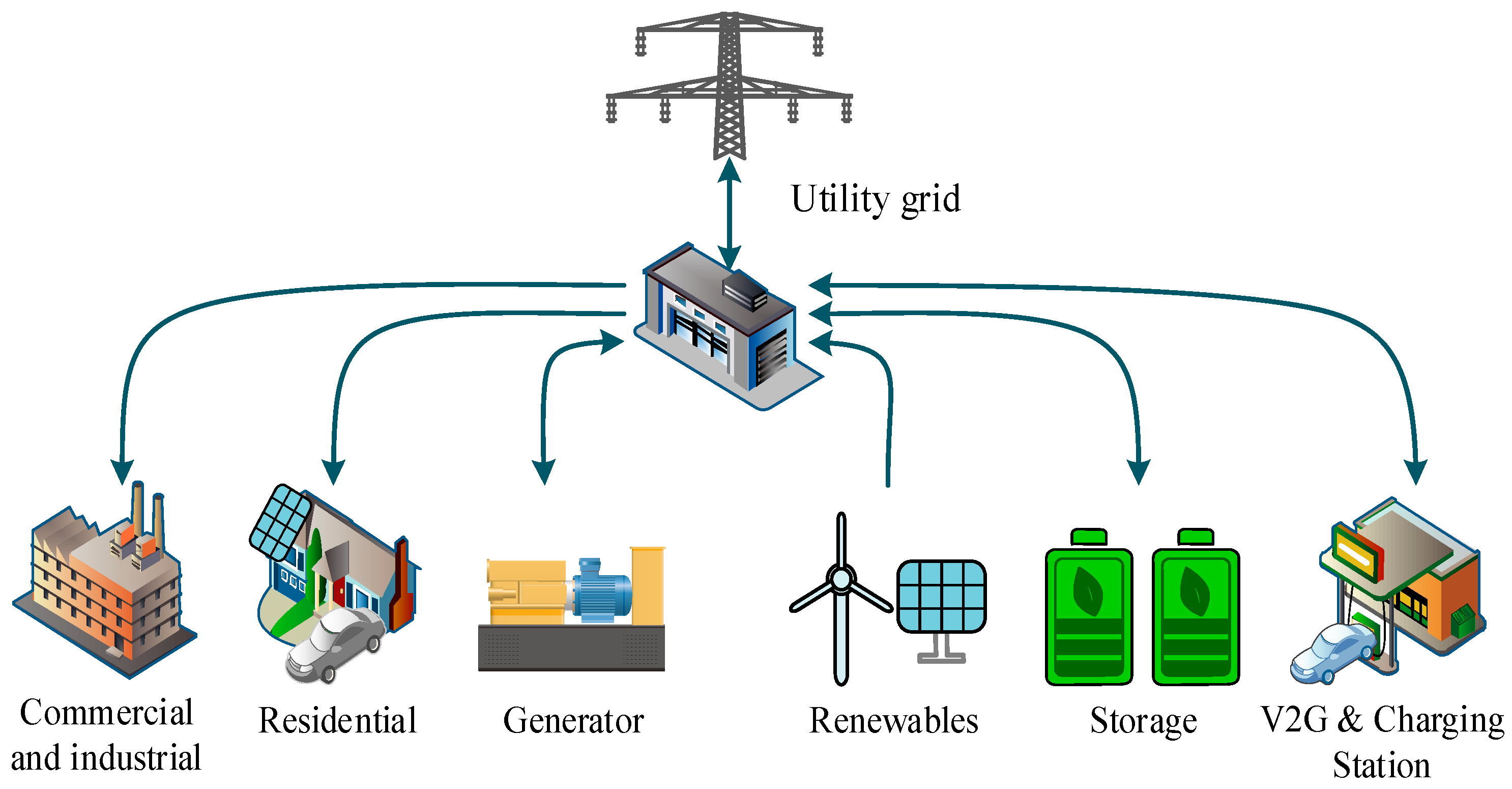
1. Introduction
- The DC microgrid is simpler due to the absence of reactive power flow control;
- Integrated distributed generations can be coordinated more easily because their control is based on DC voltage without the need for synchronization;
- Due to the prevalence of DC electronic domestic loads, the majority of DGs today produce DC outputs; this prevents the need for unnecessary AC/DC power conversions. This has a direct impact on the system’s cost and losses, further reducing the size and cost of the system due to the fact that the majority of the converters used for the DC micro-source interface do not use transformers.
- In DC systems, issues such as reactive power and frequency-synchronized power management become unimportant. Additionally, skin effect, harmonics, proximity effect, and inrush current problems are absent from the DC system because it has no frequency. DC systems are thought to be safer than AC systems because they have a lower electromagnetic field.
- Compared to an AC microgrid, voltage regulation is superior.
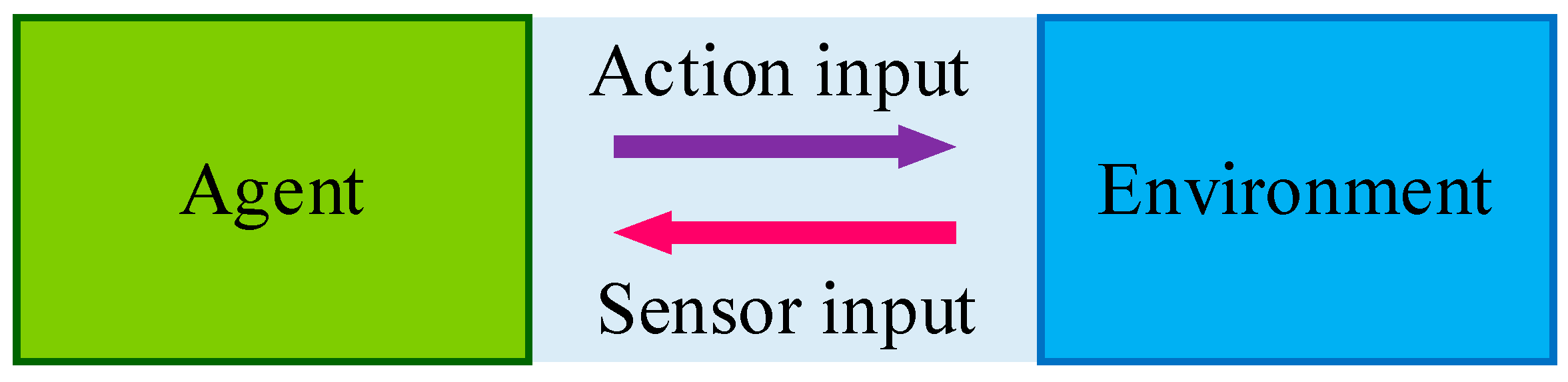
2. Multi-Agent Systems
- Any one agent in the system does not have all the information about the solution to the problem.
- None of the agents in the system have all the required capabilities to solve the problem.
- The system control is distributed.
- The data are not kept at a central location; they are distributed.
- The operation is asynchronous.
- Analysis: modeling agent roles and behaviors, identifying the application domain and the problem.
- Design: defining the solution architectures for the problems defined in the analysis step.
- Development: programming agent targets, ontologies, and functionalities.
- Deployment: initialization of the created multi-agent system, runtime agent management, message, and data processing.
3. Multi-Agent Systems for Microgrid Control
4. The Case Study: Multi-Agent-Based Control of DC Microgrid
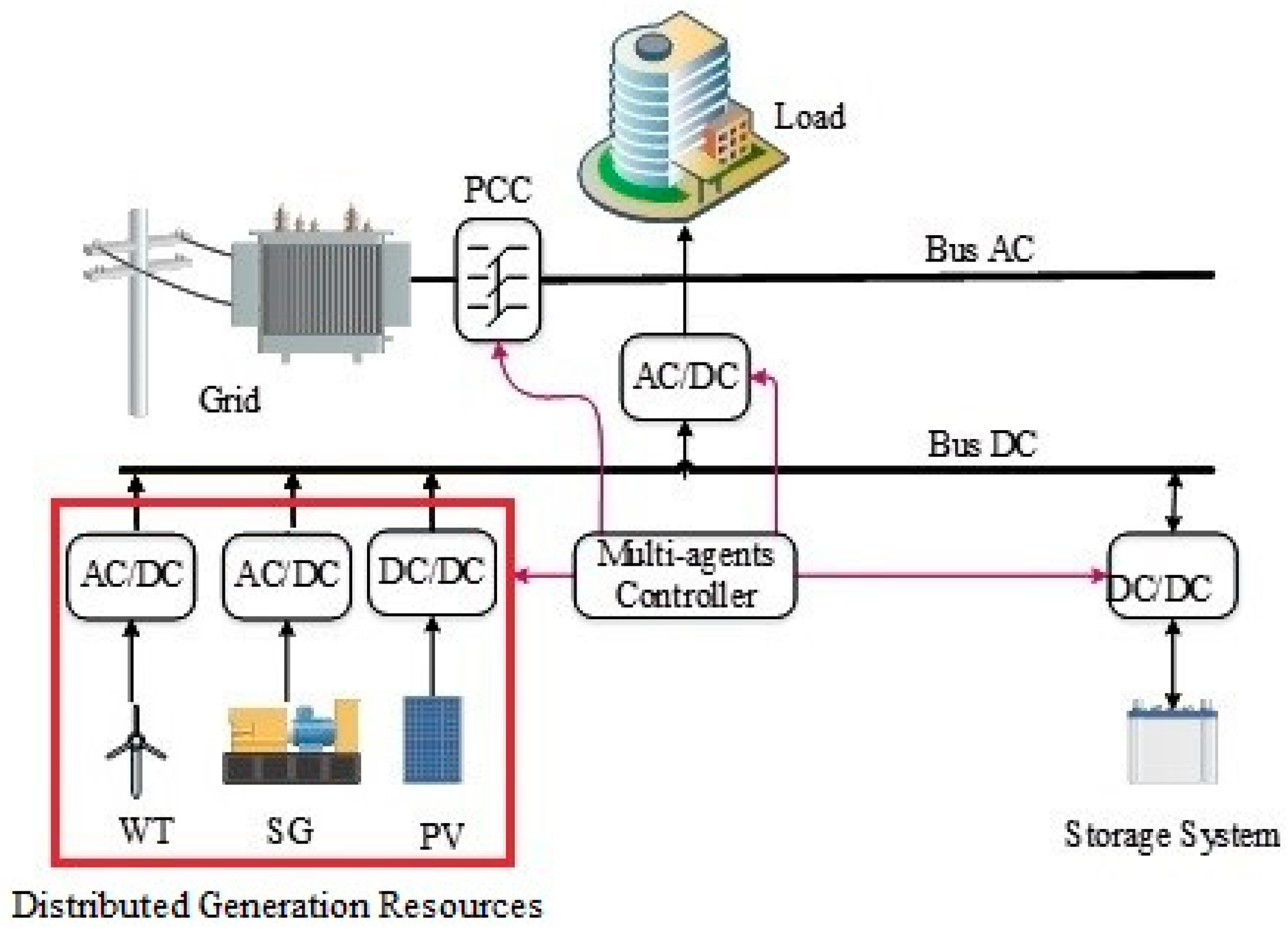
4.1. Designed DC Microgrid
4.1.1. PV System Model
4.1.2. Wind Turbine Model
4.1.3. Synchronous Generator Model
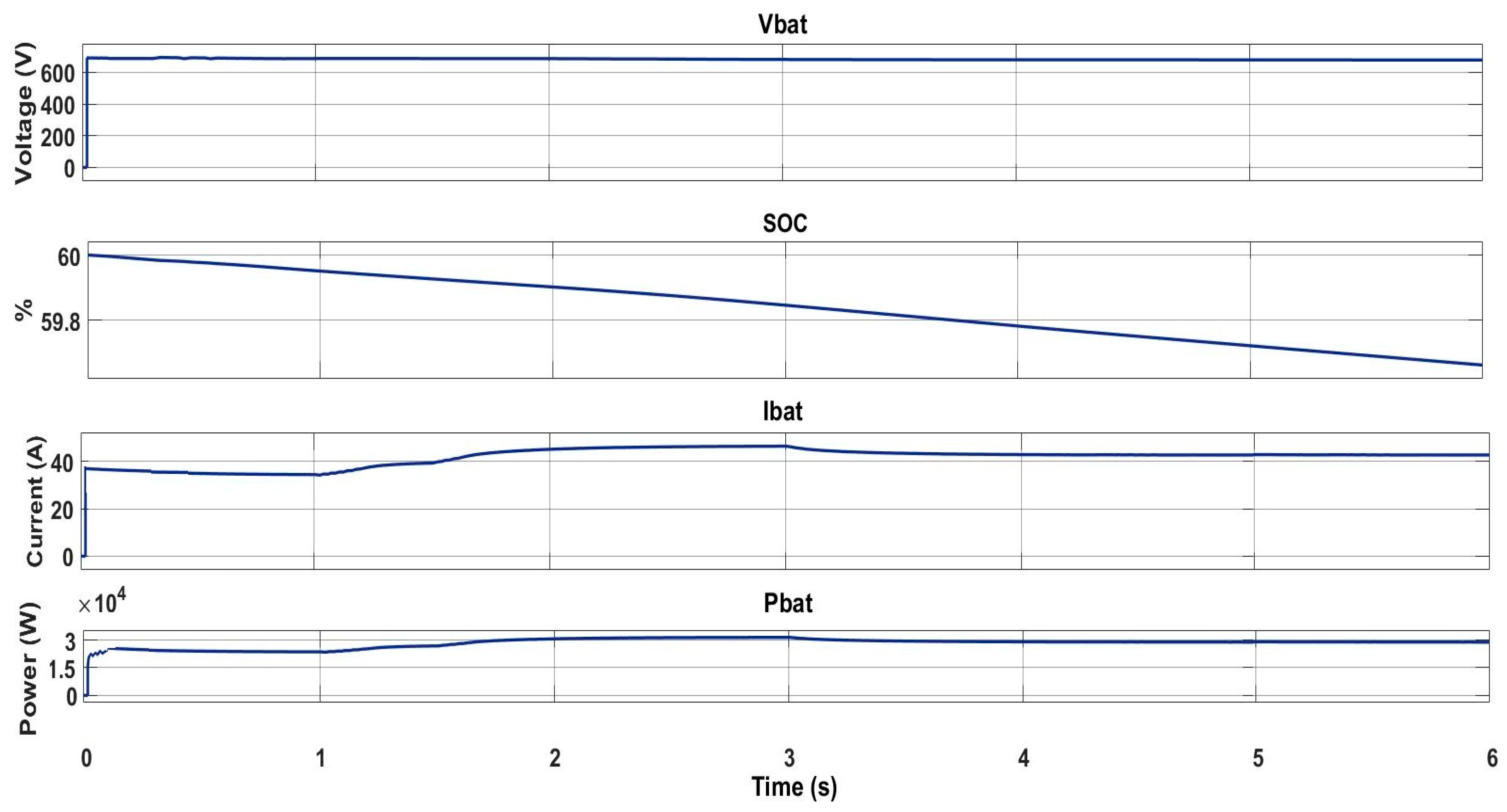
4.1.4. Battery Energy Storage System (BESS)
4.2. Proposed Multi-Agent-Based Control Strategy
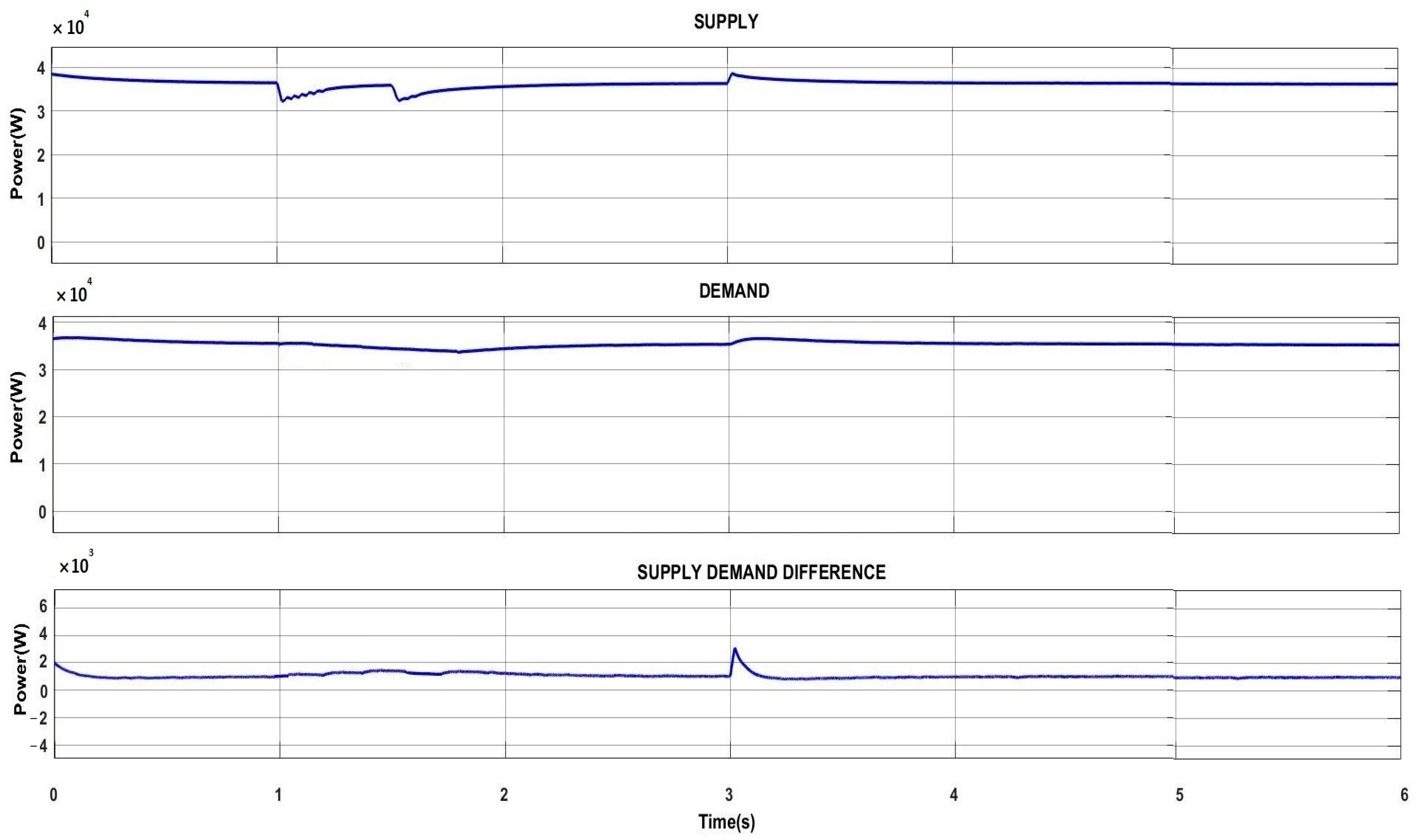
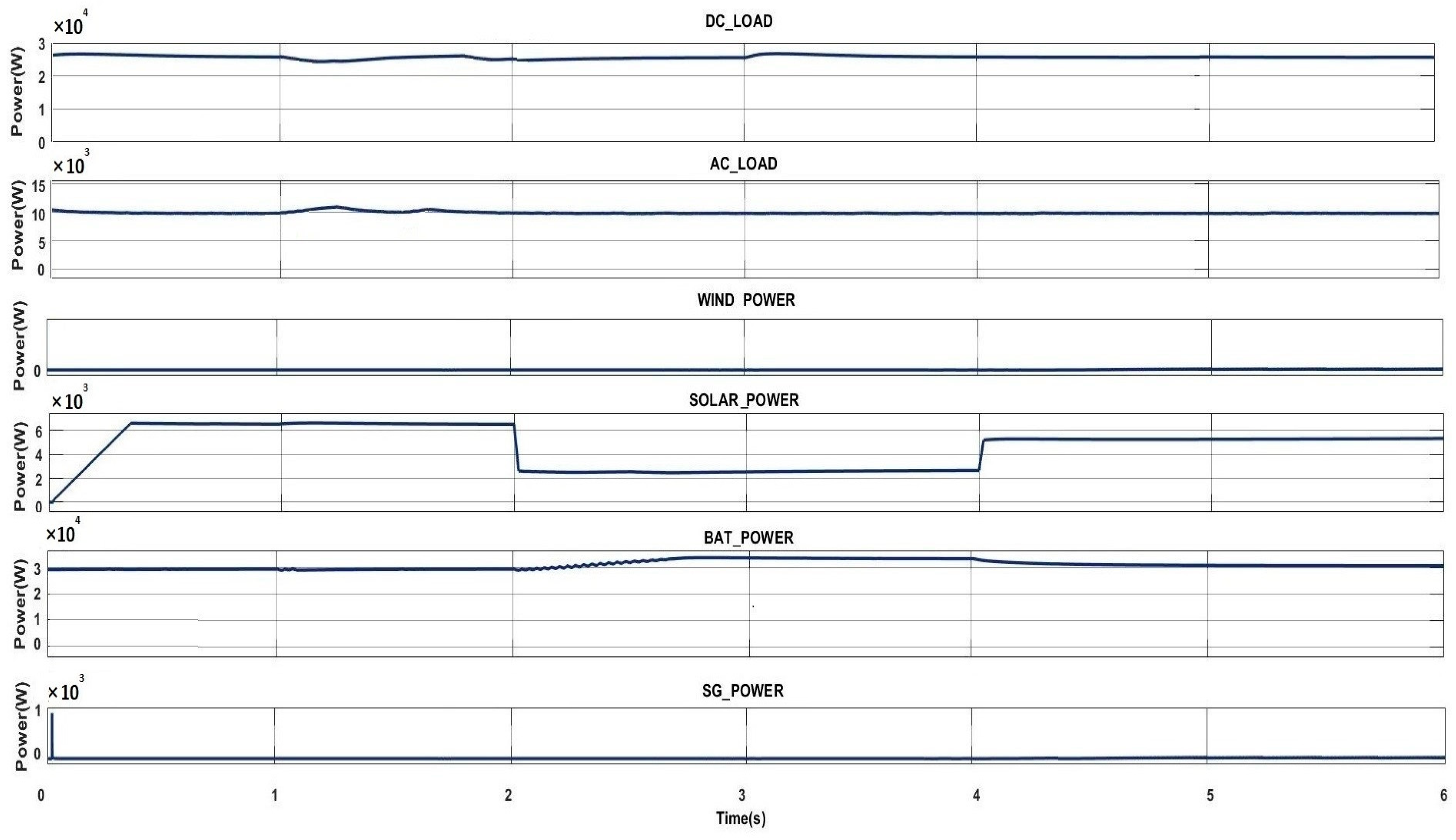
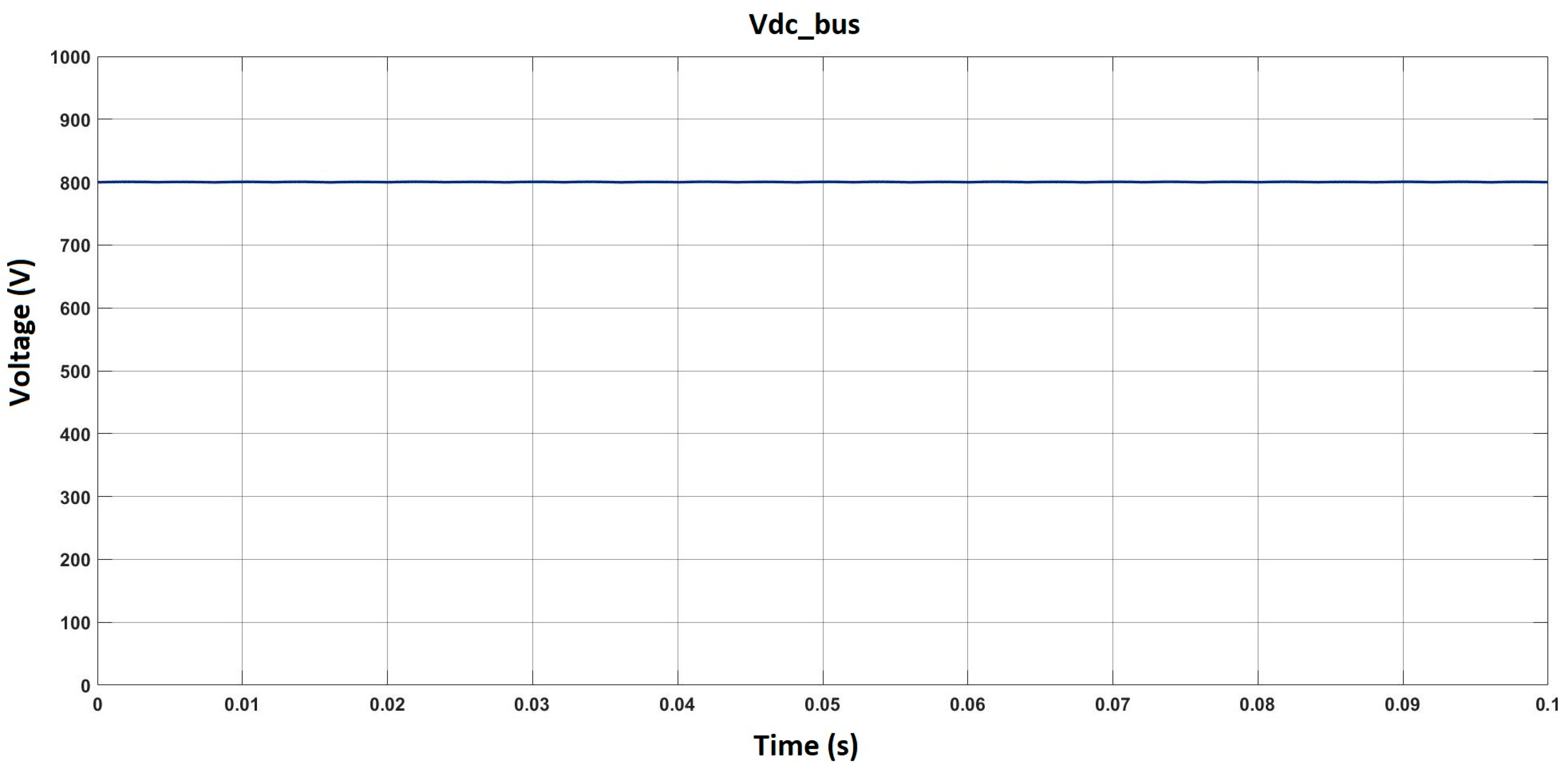
5. Simulation Results
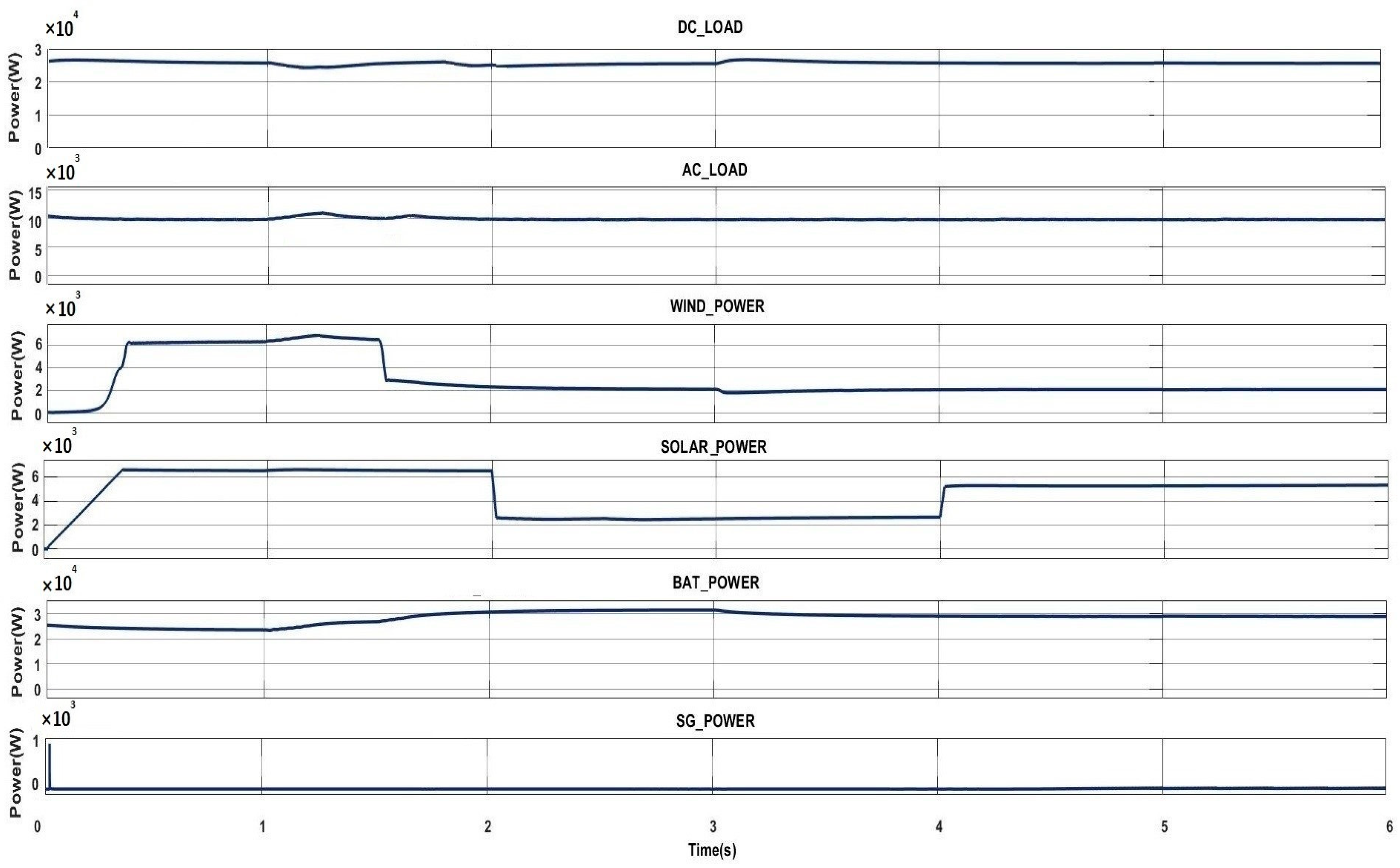
5.1. Scenario I: Solar and Wind Power Are Both Available
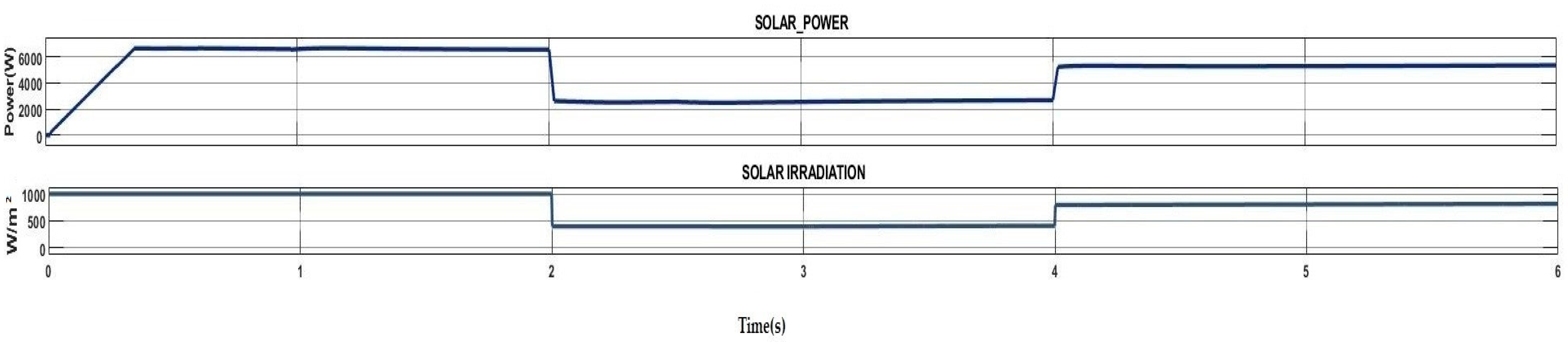
5.2. Scenario II: Only Solar Power Is Available
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Altin, N.; Eyimaya, S.E. A combined energy management algorithm for wind turbine/battery hybrid system. J. Electron. Mater. 2018, 47, 4430–4436. [Google Scholar] [CrossRef]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Altin, N.; Eyimaya, S.E. A Review of Microgrid Control Strategies. In Proceedings of the 2021 10th International Conference on Renewable Energy Research and Application (ICRERA), Istanbul, Turkey, 26–29 September 2021; pp. 412–417. [Google Scholar]
- Espina, E.; Llanos, J.; Burgos-Mellado, C.; Cardenas-Dobson, R.; Martinez-Gomez, M.; Sáez, D. Distributed control strategies for microgrids: An overview. IEEE Access 2020, 8, 193412–193448. [Google Scholar] [CrossRef]
- Shabbir, J.; Anwer, T. Artificial intelligence and its role in near future. arXiv 2018, arXiv:1804.01396. [Google Scholar]
- Dou, C.X.; An, X.G.; Yue, D. Multi-agent system based energy management strategies for microgrid by using renewable energy source and load forecasting. Electr. Power Compon. Syst. 2016, 44, 2059–2072. [Google Scholar] [CrossRef]
- Khan, M.W.; Wang, J.; Xiong, L.; Huang, S.; Lopez-Ruiz, R. Architecture of a microgrid and optimal energy management system. In Multi Agent Systems-Strategies and Applications; Intechopen: London, UK, 2020. [Google Scholar]
- Muise, C.; Belle, V.; Felli, P.; McIlraith, S.; Miller, T.; Pearce, A.R.; Sonenberg, L. Efficient multi-agent epistemic planning: Teaching planners about nested belief. Artif. Intell. 2022, 302, 103605. [Google Scholar] [CrossRef]
- Shahinzadeh, H.; Nikolovski, S.; Moradi, J.; Bayindir, R. A Resilience-Oriented Decision-Making Model for the Operation of Smart Microgrids Subject to Techno-Economic and Security Objectives. In Proceedings of the 2021 9th International Conference on Smart Grid (icSmartGrid), Setubal, Portugal, 29 June 2021–1 July 2021; pp. 226–230. [Google Scholar]
- Qasem, M.H.; Hudaib, A.; Obeid, N.; Almaiah, M.A.; Almomani, O.; Al-Khasawneh, A. Multi-agent systems for distributed data mining techniques: An overview. In Big Data Intelligence for Smart Applications; Springer: Berlin/Heidelberg, Germany, 2022; pp. 57–92. [Google Scholar]
- Merabet, G.H.; Essaaidi, M.; Talei, H.; Abid, M.R.; Khalil, N.; Madkour, M.; Benhaddou, D. Applications of multi-agent systems in smart grids: A survey. In Proceedings of the 2014 International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 14–16 April 2014; pp. 1088–1094. [Google Scholar]
- Huynh, T.D.; Jennings, N.R.; Shadbolt, N.R. FIRE: An integrated trust and reputation model for open multi-agent systems. In Proceedings of the 16th European Conference on Artificial Intelligence, Valencia, Spain, 22–27 August 2004. [Google Scholar]
- Bagherzadeh, L.; Shahinzadeh, H.; Gharehpetian, G.B. Scheduling of distributed energy resources in active distribution networks considering combination of techno-economic and environmental objectives. In Proceedings of the 2019 International Power System Conference (PSC), Tehran, Iran, 9–11 December 2019; pp. 687–695. [Google Scholar]
- Khalid, R.; Samuel, O.; Javaid, N.; Aldegheishem, A.; Shafiq, M.; Alrajeh, N. A secure trust method for multi-agent system in smart grids using blockchain. IEEE Access 2021, 9, 59848–59859. [Google Scholar] [CrossRef]
- Consoli, A.; Tweedale, J.; Jain, L. The link between agent coordination and cooperation. In Proceedings of the International Conference on Intelligent Information Processing, Adelaide, Australia, 20–23 September 2006; Springer: Boston, MA, USA, 2006; pp. 11–19. [Google Scholar]
- Castelfranchi, C. Modelling social action for AI agents. Artif. Intell. 1998, 103, 157–182. [Google Scholar] [CrossRef]
- Andreadis, G.; Klazoglou, P.; Niotaki, K.; Bouzakis, K.D. Classification and review of multi-agents systems in the manufacturing section. Procedia Eng. 2014, 69, 282–290. [Google Scholar] [CrossRef]
- Bellifemine, F.L.; Caire, G.; Greenwood, D. Developing Multi-Agent Systems with JADE.; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Ferber, J.; Gutknecht, O. A meta-model for the analysis and design of organizations in multi-agent systems. In Proceedings of the Proceedings International Conference on Multi Agent Systems (Cat. No. 98EX160), Paris, France, 3–7 July 1998; pp. 128–135. [Google Scholar]
- Bhavsar, V.C.; Boley, H.; Yang, L. A Weighted-Tree Similarity Algorithm for Multi-Agent Systems in E-Business Environments. Comput. Intell. 2004, 20, 584–602. [Google Scholar] [CrossRef]
- Tapia, D.I.; Corchado, J.M. An ambient intelligence based multi-agent system for alzheimer health care. Int. J. Ambient. Comput. Intell. (IJACI) 2009, 1, 15–26. [Google Scholar] [CrossRef]
- Nematollahi, A.F.; Shahinzadeh, H.; Nafisi, H.; Vahidi, B.; Amirat, Y.; Benbouzid, M. Sizing and Sitting of DERs in Active Distribution Networks Incorporating Load Prevailing Uncertainties Using Probabilistic Approaches. Appl. Sci. 2021, 11, 4156. [Google Scholar] [CrossRef]
- Ding, Z.; Huang, T.; Lu, Z. Learning individually inferred communication for multi-agent cooperation. Adv. Neural Inf. Process. Syst. 2020, 33, 22069–22079. [Google Scholar]
- Hägg, S. A sentinel approach to fault handling in multi-agent systems. In Australian Workshop on Distributed Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 1996; pp. 181–195. [Google Scholar]
- Rangwala, M.; Williams, R. Learning multi-agent communication through structured attentive reasoning. Adv. Neural Inf. Process. Syst. 2020, 33, 10088–10098. [Google Scholar]
- Roscia, M.; Longo, M.; Lazaroiu, G.C. Smart City by multi-agent systems. In Proceedings of the 2013 International Conference on Renewable Energy Research and Applications (ICRERA), Madrid, Spain, 20–23 October 2013; pp. 371–376. [Google Scholar]
- Albarakati, A.J.; Azeroual, M.; Boujoudar, Y.; ELIysaouy, L.; Aljarbouh, A.; Tassaddiq, A.; ELMarkhi, H. Multi-Agent-Based Fault Location and Cyber-Attack Detection in Distribution System. Energies 2023, 16, 224. [Google Scholar] [CrossRef]
- Stennikov, V.; Barakhtenko, E.; Mayorov, G.; Sokolov, D.; Zhou, B. Coordinated management of centralized and distributed generation in an integrated energy system using a multi-agent approach. Appl. Energy 2022, 309, 118487. [Google Scholar] [CrossRef]
- Domyshev, A.; Sidorov, D. Optimization of the Structure of Power System Multi-Agent Control. IFAC-Pap 2022, 55, 250–255. [Google Scholar] [CrossRef]
- McArthur, S.D.; Davidson, E.M.; Catterson, V.M.; Dimeas, A.L.; Hatziargyriou, N.D.; Ponci, F.; Funabashi, T. Multi-agent systems for power engineering applications—Part I: Concepts, approaches, and technical challenges. IEEE Trans. Power Syst. 2007, 22, 1743–1752. [Google Scholar] [CrossRef]
- Victorio ME, C.; Kazemtabrizi, B.; Shahbazi, M. Price Forecast Methodologies Comparison for Microgrid Control with Multi-Agent Systems. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June 2021–2 July 2021; pp. 1–6. [Google Scholar]
- Chung, I.Y.; Cheol-HeeYoo SJ, O. Distributed intelligent microgrid control using multi-agent systems. Engineering 2013, 5, 1–6. [Google Scholar] [CrossRef]
- Almada, J.B.; Leao, R.P.; Almeida, R.G.; Sampaio, R.F. Microgrid distributed secondary control and energy management using multi-agent system. Int. Trans. Electr. Energy Syst. 2021, 31, e12886. [Google Scholar] [CrossRef]
- Jabeur, R.; Boujoudar, Y.; Azeroual, M.; Aljarbouh, A.; Ouaaline, N. Microgrid energy management system for smart home using multi-agent system. Int. J. Electr. Comput. Eng. 2022, 12, 2088–8708. [Google Scholar] [CrossRef]
- Zheng, W.D.; Cai, J.D. A multi-agent system for distributed energy resources control in microgrid. In Proceedings of the 2010 5th International Conference on Critical Infrastructure (CRIS), Beijing, China, 20–22 September 2010; pp. 1–5. [Google Scholar]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M.; Aung, H.N. Multi-Agent System (MAS) for short-term generation scheduling of a microgrid. In Proceedings of the 2010 IEEE international Conference on Sustainable Energy Technologies (ICSET), Kandy, Sri Lanka, 6–9 December 2010; pp. 1–6. [Google Scholar]
- Jin, S.; Wang, S.; Fang, F. Game theoretical analysis on capacity configuration for microgrid based on multi-agent system. Int. J. Electr. Power Energy Syst. 2021, 125, 106485. [Google Scholar] [CrossRef]
- Khan, M.W.; Wang, J.; Ma, M.; Xiong, L.; Li, P.; Wu, F. Optimal energy management and control aspects of distributed microgrid using multi-agent systems. Sustain. Cities Soc. 2019, 44, 855–870. [Google Scholar] [CrossRef]
- Khan, M.W.; Wang, J. The research on multi-agent system for microgrid control and optimization. Renew. Sustain. Energy Rev. 2017, 80, 1399–1411. [Google Scholar] [CrossRef]
- Alhasnawi, B.N.; Jasim, B.H.; Sedhom, B.E. Distributed secondary consensus fault tolerant control method for voltage and frequency restoration and power sharing control in multi-agent microgrid. Int. J. Electr. Power Energy Syst. 2021, 133, 107251. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, T.L.; Xu, Y.; Tran, Q.T.; Caire, R. Peer-to-peer control for networked microgrids: Multi-layer and multi-agent architecture design. IEEE Trans. Smart Grid 2020, 11, 4688–4699. [Google Scholar] [CrossRef]
- Mohamed, A.; Lamhamdi, T.; El Moussaoui, H.; El Markhi, H. A multi-agent system for fault location and service restoration in power distribution systems. Multiagent Grid Syst. 2019, 15, 343–358. [Google Scholar] [CrossRef]
- Luo, F.; Dong, Z.Y.; Liang, G.; Murata, J.; Xu, Z. A distributed electricity trading system in active distribution networks based on multi-agent coalition and blockchain. IEEE Trans. Power Syst. 2018, 34, 4097–4108. [Google Scholar] [CrossRef]
- Gomes, L.; Vale, Z.A.; Corchado, J.M. Multi-agent microgrid management system for single-board computers: A case study on peer-to-peer energy trading. IEEE Access 2020, 8, 64169–64183. [Google Scholar] [CrossRef]
- Sesetti, A.; Nunna, H.K.; Doolla, S.; Rathore, A.K. Multi-agent based energy trading platform for energy storage systems in distribution systems with inter-connected microgrids. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Dong, X.; Li, X.; Cheng, S. Energy management optimization of microgrid cluster based on multi-agent-system and hierarchical stackelberg game theory. IEEE Access 2020, 8, 206183–206197. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author and Year | Applications of MAS in Microgrid | Aim | Application |
|---|---|---|---|
| Victorio et al., 2021 [31] Chung et al., 2013 [32] Almada et al., 2021 [33] Jabeur et al., 2022 [34] Zheng and Cai. 2010 [35] | Distributed Control | Solving the real and reactive power mismatch arising from distributed generation and maintaining the balance between supply and demand in microgrid. | Multi-agent system-based microgrid control models are created using artificial neural networks and fuzzy systems for tasks such as generation planning and load forecasting for operations planning |
| Logenthiran et al., 2010 [36] Jin et al., 2021 [37] Khan et al., 2019 [38] Khan and Wang. 2017 [39] | Optimization | Increase efficiency by optimizing the actions of microgrid components. | An artificial immune system-based algorithm is used to optimize the efficiency of renewable energy sources in the system and maximize power generation. |
| Alhasnawi et al., 2021 [40] Wang et al., 2020 [41] Mohamed et al., 2019 [42] | Power Restoration | Provide power restoration in the event of a large-scale power outage in microgrids. | A hierarchical control strategy is implemented along with a multi-agent immunity algorithm for rapid restoration of strength. |
| Luo et al., 2018 [43] Gomes et al., 2020 [44] Sesetti et al., 2018 [45] | Electrical Energy Trading | Maximizing the revenue from the microgrid. | Creates a pricing mechanism for the microgrid in the competitive electricity market and algorithms for price determination based on demand and supply strategies. |
| The Block Parameters of PV | Value |
|---|---|
| Open circuit voltage | 44.49 (V) |
| Short-circuit current | 8.19 (A) |
| Voltage at maximum power point | 35.00 (V) |
| Current at maximum power point | 7.71 (A) |
| Temperature coefficient of open circuit voltage | 0.1504% (V/°C) |
| The Block Parameters of Wind Turbine | Value |
|---|---|
| Nominal mechanical output power | 10 (kW) |
| Base power of electrical generator | 10/0.9 (kVA) |
| Base wind speed | 12 (m/s) |
| Maximum power at base wind speed | 0.8 (pu) |
| Base rotational speed | 1.2 (pu) |
| The Block Parameters of Synchronous Generator | Value |
|---|---|
| Nominal power | 1000 (VA) |
| Line-to-line voltage | 400 (V) |
| Frequency | 50 (Hz) |
| Stator resistance | 0.00285 (pu) |
| The Block Parameters of Li-Ion Battery | Value |
|---|---|
| Nominal voltage | 650 (V) |
| Rated capacity | 20 (Ah) |
| Initial state-of-charge (SoC) | 60 (%) |
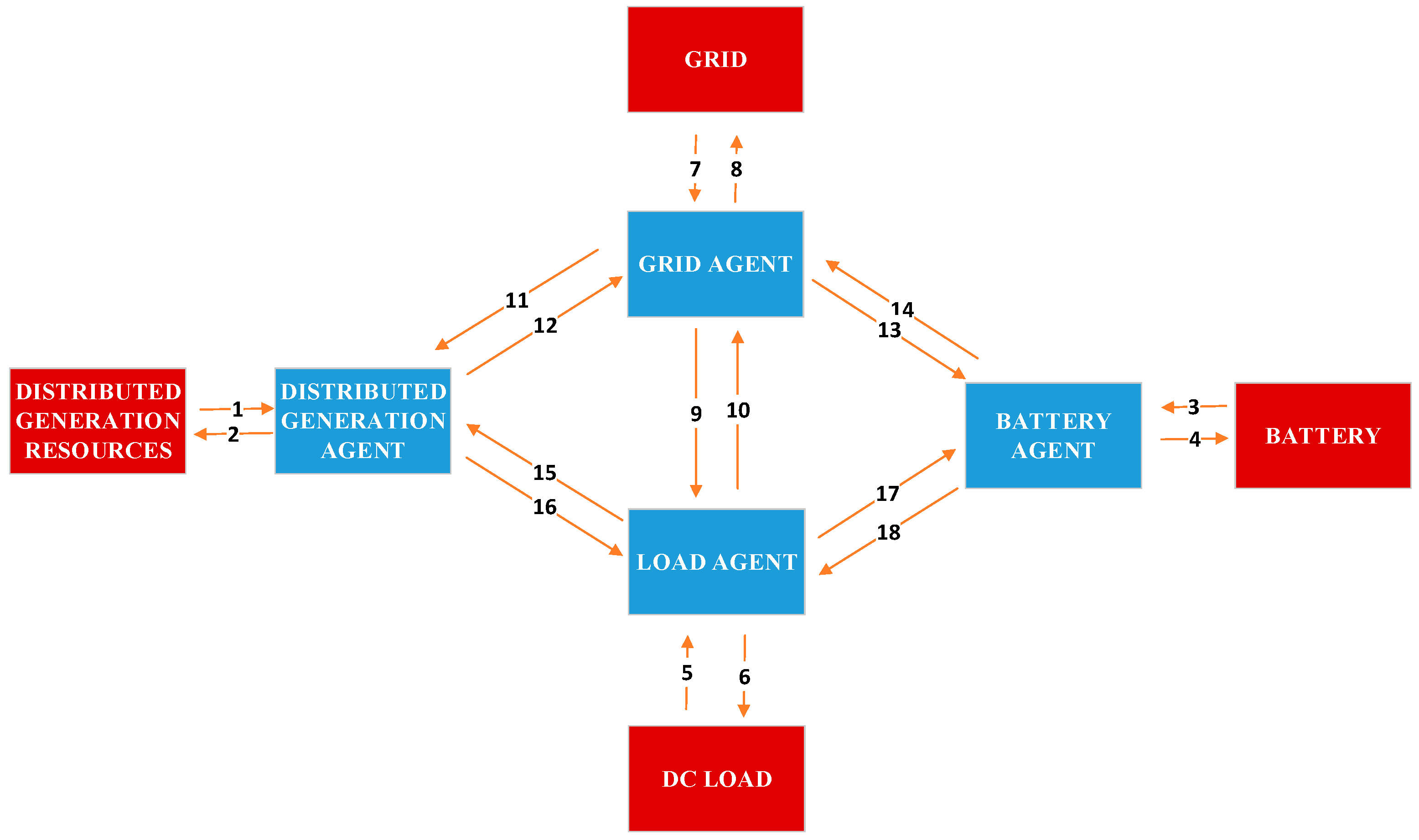
| Number | Communication and Coordination |
|---|---|
| 1 | Distributed generation agent receives power, voltage and current information from distributed generation sources. |
| 2 | The distributed generation agent makes MPPT with the information it receives and transfers it to the resources. |
| 3 | Battery agent receives voltage, current, power and SoC information from the battery. |
| 4 | Battery agent implements the battery control algorithm and transfers it to the battery. |
| 5 | Load agent receives power consumed from critical and non-critical loads. |
| 6 | Load agent transmits information for the exit of non-critical loads according to the system supply/demand situation. |
| 7 | Grid agent receives voltage, current and power information from the grid. |
| 8 | Grid agent converts the common DC bus voltage to AC with DQ control and transfers it to the grid. |
| 9 | Load agent requests network agent to open/close PCC. |
| 10 | Grid agent notifies the installation agent of the mode of the system (on/off grid). |
| 11 | Grid agent notifies mode to distributed generation agent (on/off grid). |
| 12 | Distributed generation agent transmits the generated power to the grid agent. |
| 13 | Grid agent notifies battery agent mode (on/off grid). |
| 14 | Battery agent reports common DC bus voltage information to the grid agent. |
| 15 | Load agent requests power from the distributed generation agent. |
| 16 | Distributed generation agent gives production information to the load agent and requests load shedding in underproduction. |
| 17 | Load agent requests power from the battery agent. |
| 18 | Battery agent provides production information to load agent and requests charge shedding when SoC is low. |
| Time (sn) | Value (W/m2) |
|---|---|
| 0–2 | 1000 |
| 2–4 | 400 |
| 4–6 | 800 |
| Time (sn) | Value (m/s) |
|---|---|
| 0–0.5 | 5 |
| 0.5–2.5 | 12 |
| 2.5–6 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altin, N.; Eyimaya, S.E.; Nasiri, A. Multi-Agent-Based Controller for Microgrids: An Overview and Case Study. Energies 2023, 16, 2445. https://doi.org/10.3390/en16052445
Altin N, Eyimaya SE, Nasiri A. Multi-Agent-Based Controller for Microgrids: An Overview and Case Study. Energies. 2023; 16(5):2445. https://doi.org/10.3390/en16052445
Chicago/Turabian StyleAltin, Necmi, Süleyman Emre Eyimaya, and Adel Nasiri. 2023. "Multi-Agent-Based Controller for Microgrids: An Overview and Case Study" Energies 16, no. 5: 2445. https://doi.org/10.3390/en16052445
APA StyleAltin, N., Eyimaya, S. E., & Nasiri, A. (2023). Multi-Agent-Based Controller for Microgrids: An Overview and Case Study. Energies, 16(5), 2445. https://doi.org/10.3390/en16052445