1. Introduction
Electrical motors are now incorporated into every facet of today’s life and primarily convert electrical energy to mechanical energy. Their makeup consists of steel cores with insulated electrical windings, bearings, rotors, and couplings. A key material affecting the life of a motor is the electrical insulation. The electrical insulating material applied to the winding conductors used in electrical motors varies from simple enamel coatings to layers of glass/mica tape impregnated with resins. It can also consist of layers of specialized insulating material such as Nomex or Kapton. The type of insulation and the number of layers applied depend on the operating voltages and thermal conditions. The more exotic the material, the higher the costs. Its purpose is to insulate the turn conductors from each other and from the core. All insulation systems are susceptible to mechanical and thermal damage [
1], and their ability to maintain their insulating property can be greatly affected by pollutants such as dirt, oil, and moisture [
2].
The insulation system for small motors up to 300 kW is primarily made from enamel resins, and for large motors, a resin-impregnated fibreglass carrier with mica is normally used. When motors are in service, this insulation is affected by several operating conditions. High temperatures (HT) and temperature gradients (TG) are key issues affecting insulation integrity, but normal operating conditions such as thermal cycling, load variations, voltage fluctuations, system harmonics, and daily environmental temperature changes cause insulation aging. For motors greater than 50 kW, the air gap flow heating phenomena [
3] also affect insulation life. Normal maximum running temperatures by design are set by the class of insulation used. If temperatures exceed the class temperature by 10
C, the insulation life will be halved. Variations in the operation temperature result in varying dimensional changes to the windings, insulation, core, and wedging systems. The mechanical stresses on the insulation due to different thermal expansion rates damage the insulation and result in surface damage and microcracking of the insulation [
4,
5]. This then enables moisture absorption and higher leakage currents [
6].
New motors with new windings and insulation are nearly waterproof, as the insulation systems have little surface damage and absorb little moisture. Motors that have been in service for a long time are extremely hygroscopic [
7,
8], and a day of high humidity can result in an extremely low insulation resistance (IR) value [
9]. Electrically testing a winding’s IR will show the serviceability of the insulation. Standards give a minimum IR value of
, where
E is the line voltage in kV [
10].
When motors or generators are in service, they are hot, and moisture issues are rare [
11]. Motors that are continually running for long periods of time suffer less from mechanical stresses, as the operational temperatures are more stable, compared to motors that are frequently started and stopped. Base-load hydro generators are good examples of electrical winding with long lives. Pumps or pressurising systems are good examples of motors that have short lives.
In all cases, as the insulation ages, electrical insulation systems become more susceptible to moisture ingress and failure [
8,
12]. Even motors stored for future use suffer from moisture ingress due to normal daily thermal cycling [
13]. When internal air heats, it expands, causing it to bleed out of the motor. When it cools and contracts, it pulls air in with moisture from outside. Continued thermal cycling concentrates the internal moisture levels. This process affects in-service motors as well as motors stored as spares for operational backup. Over time, this daily thermal cycling can result in many litres of water being trapped inside the motor.
Because of the design of a motor, there is a large amount of iron in the stator and rotor cores, and they also have substantial frames. Consequently, a large mass results in a time delay in temperature stabilization with the external environment. The resulting temperature difference can result in internal condensation with the internal surfaces becoming wet and the electrical insulation absorbing high levels of moisture [
8]. This high level of moisture contamination can lead to catastrophic insulation failure [
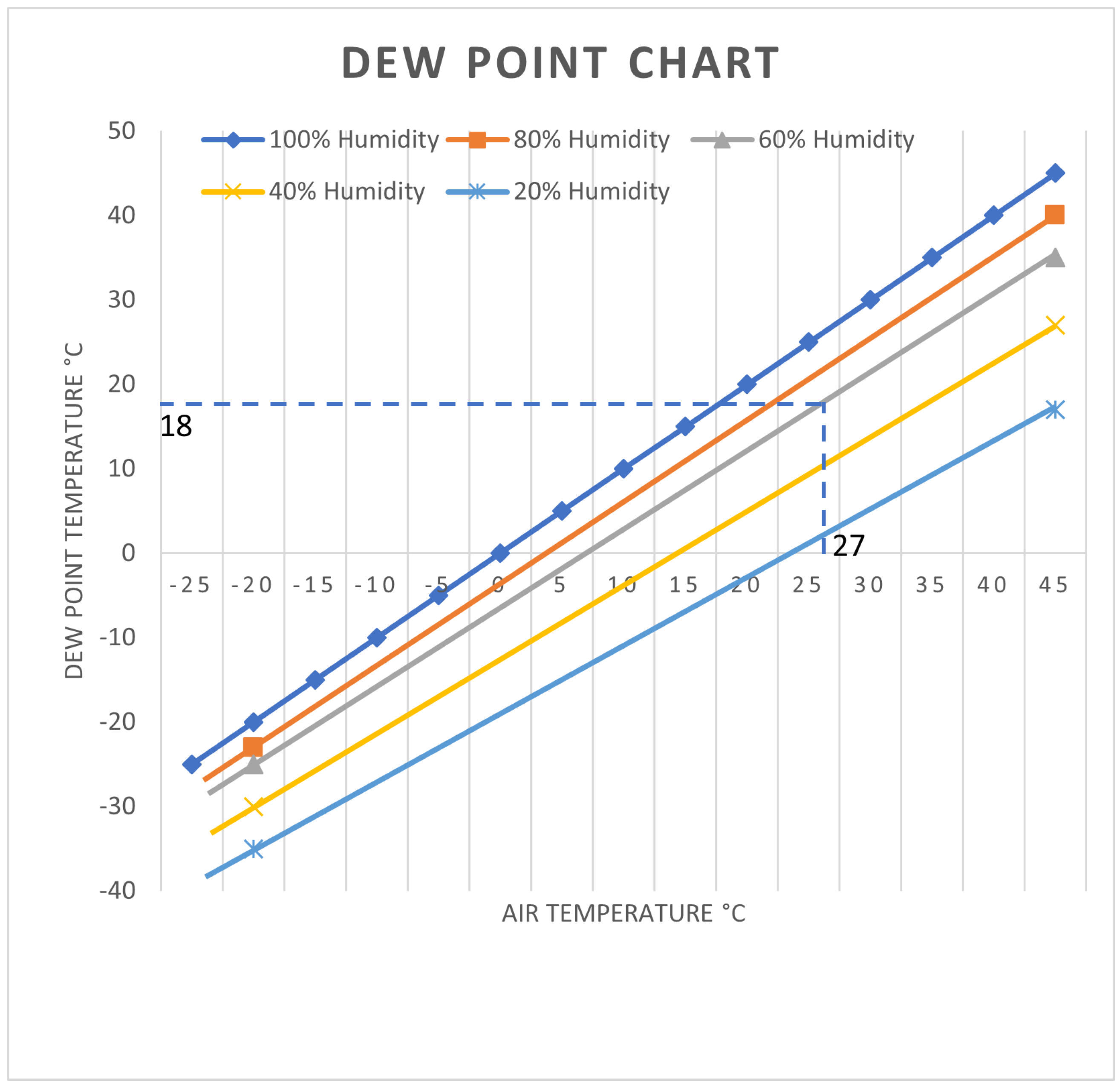
14]. With hot days, cool nights, and the thermal inertia inside the machine, condensation is an issue. The point where moisture in the internal air will condense onto surfaces [
15,
16] or above daily temperatures [
17] is called the dew point. As shown in
Figure 1 [
2], with an air temperature of 27
C and a humidity of 60%, the dew point is 18
C, and at 80% humidity, the dew point is 23
C. In normal conditions with cold nights and the air temperatures quickly rising when the sun rises, the conditions for internal condensation are easily reached, and internal heaters often fail to prevent internal condensation.
The degree of protection required and the practical systems to maintain motors above the dew point are dependent on a number of factors. Of immediate consideration is whether the motor is cycling in and out of service or whether it is being stored from the short- to the long term. If it is being stored, the environmental conditions become very important with internal temperature-controlled warehouses being far more protective than outside storage. To help eliminate internal condensation and moisture absorption, the internals of a motor need to be kept above the dew point [
7]. The most common method employed to achieve this is the installation of resistive heaters mounted internally. Another system of heating heats the winding by circulating a low current via electronic supplies [
7].
For storage, portable electric heaters inside a storage container, or for large machines, temporarily installed space heaters can be used [
13]. Partial disassembly of the motor eliminates an internal environment that can result in condensation [
17]. The use of waterproof bagging with several bags of desiccant (silica gel) can also be used [
17]. Another option is called cocooning, sometimes used by the military, where the motor is protected and then covered with a layer of plastic sheeting; then, a continuous layer of plastic film is sprayed directly onto the motor surface [
17]. Moreover, the process of slowly raising the motor temperatures while circulating dry air can remove upper level moisture contamination [
18] before placing the motor back into service.
The heating methods currently employed, as described above, have difficulty in keeping motors above the dew point [
2]. The resistive heaters commonly used are limited because they heat the internal air and have difficulty coping with rapid external temperature changes. Winding heating systems require extra equipment that adds to the installation and maintenance costs and is rarely applied. The cocooning option used by the military is for extreme conditions, and when in place, it is regularly renewed, increasing maintenance costs. Storage systems try to limit thermal cycling, but this is difficult to achieve.
This research investigates the application of thermoelectric coolers (TECs) to heat a motor to decrease the thermal gradients and stresses, eliminate the internal condensation issues, and stop the water absorption. The TEC module is a solid-state heat pump, and the direction the heat is pumped depends on the supply polarity applied to the module. The aim of this study is to set the TEC up to pump heat into the core to determine whether the inner core temperatures at the winding position can be controlled, providing the opportunity to keep the winding and internals hot. The TECs were incorporated into three basic systems to measure their impact on the heating system. This would help to control the condensation issues and reduce the thermal cycling stresses on the insulation and bracing systems. It is not a comparison between systems, as the system configuration requirements are dependent on the load and the environmental conditions and are different for each motor system. Any system that can improve the life of a motor and reduce the life cycle costs is worth exploring. The introduction of new technology often leads to additional environmental problems [
19], but the introduction of the TEC and the ability to directly pump heat into the core will reduce the temperature differences, reducing the mechanical stresses and moisture issues without impacting other systems.
This research used a standard electrical motor integrated with sensors to monitor the temperatures at various locations using TECs to control the internal temperatures. The use of TECs to control internal temperatures has not been previously tried, and this was the first attempt to incorporate these low-cost devices into a fully instrumented motor working in standard operating conditions to improve the reliability and reduce the life cycle cost.
Section 2 explains the TEC devices available and their performance.
Section 3 describes the test motor and each of the four heating setups (resistors, heat sinks, heat pipes, and a water heat exchanger) with the results from the four heating systems.
Section 4 discusses the obtained results, and
Section 5 concludes with the findings of the study.
2. Thermoelectric Cooling Device (Peltier Module)
The makeup of a thermoelectric cooling device is a combination of N and P type material between two ceramic plates. The most common and economical material is bismuth telluride (Bi
Te
) or lead telluride (PbTe). These are low temperature materials that limit the operating range of the TEC. However, the base materials can be alloyed with other materials to improve the performance at various temperatures [
20]. Thus, by alloying the base materials with other materials, the temperature ranges can be significantly increased to match the application.
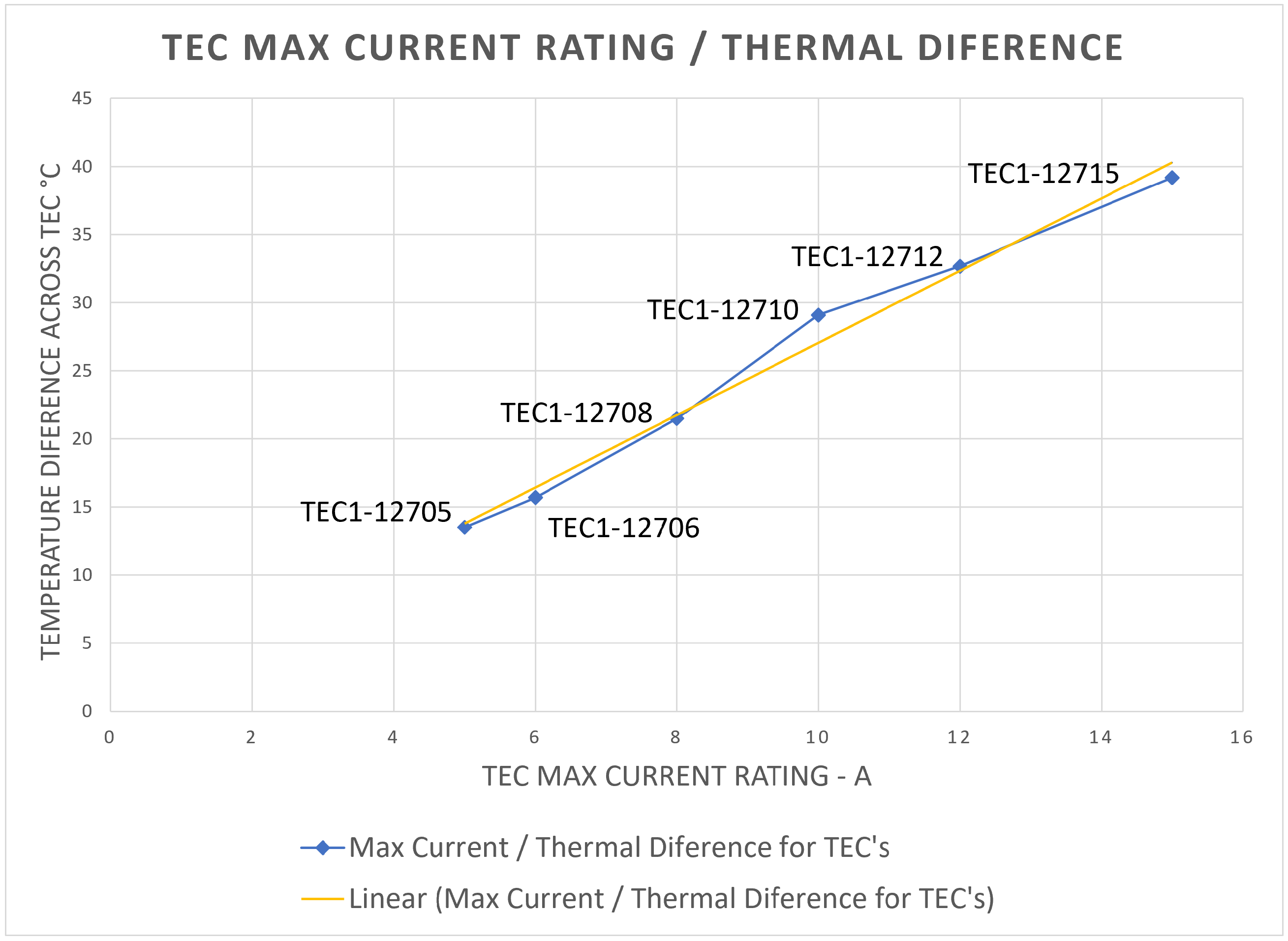
The expected life of these units is 200,000 h, but care must be taken to not exceed the maximum ratings. There are also a variety of these units; for example, the TEC1-12715 (A$6.08) is rated for a maximum temperature of 70 C, and the TEC1-12715HTS (A$33.58) has a rating of 200 C. The cost increases in proportion to the increased temperature range.
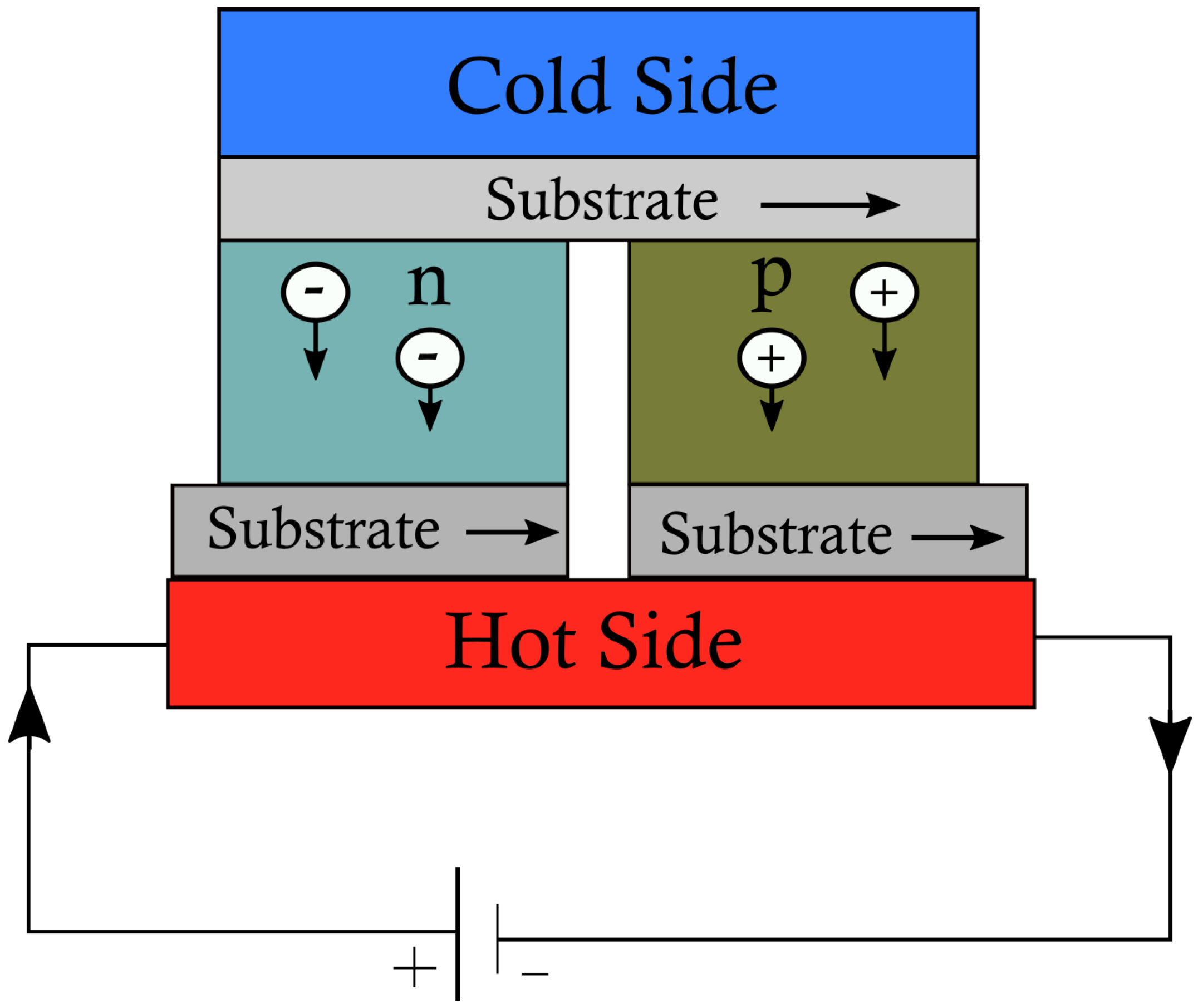
When a current passes through the TEC, heat is transferred from one plate to the other, as shown in
Figure 2, and energy is pumped from one plate to the opposite plate. Today, these modules can be found in portable water coolers or heated seats in the car industry.
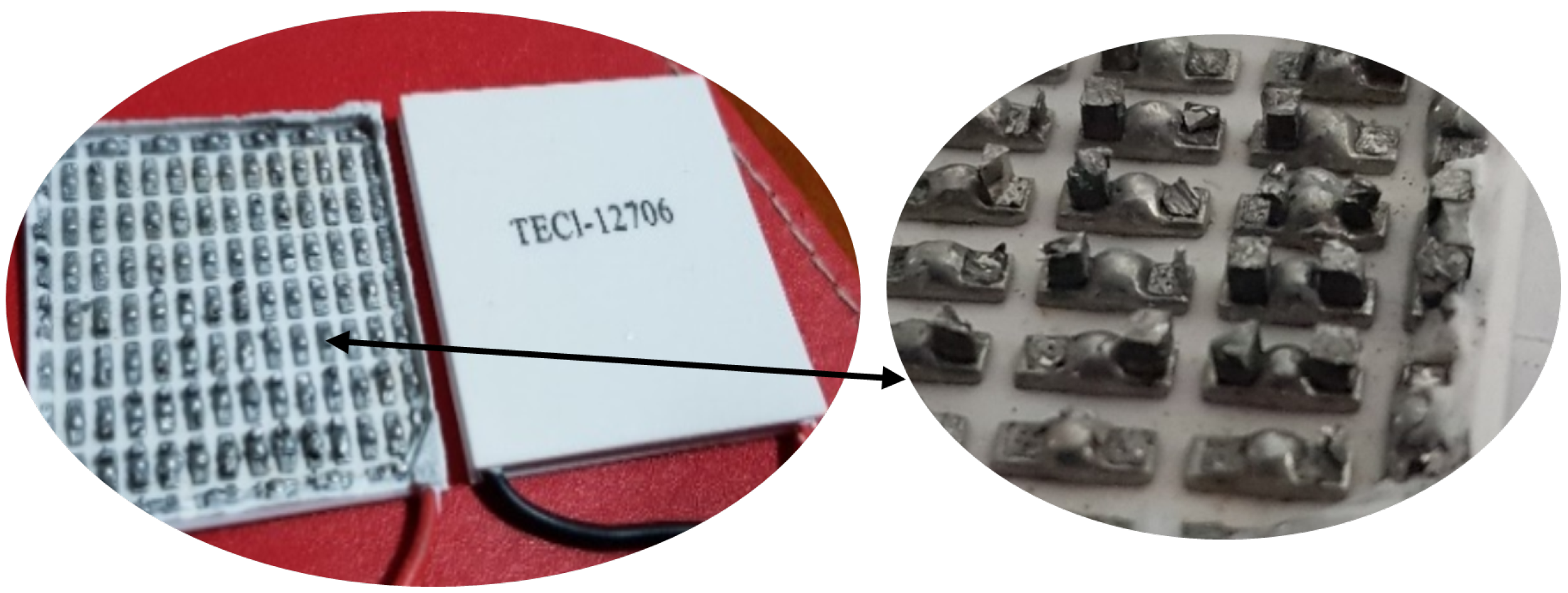
Figure 2 shows a schematic diagram [
21], and
Figure 3 provides a view of the internal constructional layout.
The TEC data sheets are based on the cold plate being held at 0
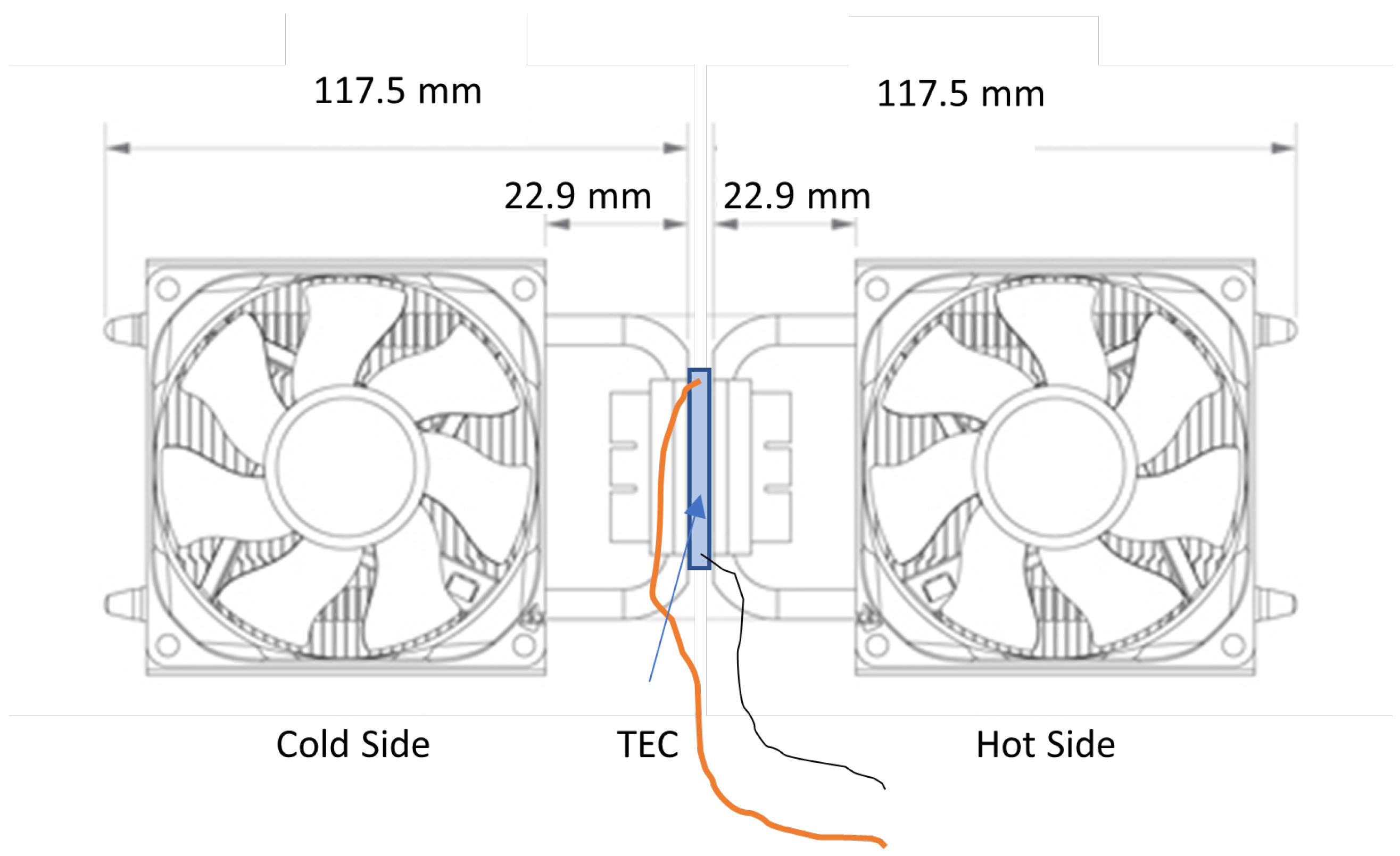
C. In application, the operation of the cold plate is likely to be subjected to climatic and industrial variations in temperature, so, six easily obtained TECs were tested to develop a better understanding of their operational performance. The test setup in
Figure 4, also shown in Figure 9 in [
22], was developed to allow the TECs to be tested and the performance characteristics to be compared.
Each of the TECs was installed into the test rig in turn, and the current was increased in 0.5 A steps until its rating was reached. A plot of the TEC current rating against the temperature is shown in
Figure 5. As can be seen, the temperature gains were linear in proportion to the maximum TEC current rating.
The thermoelectric cooler (Peltier Module) chosen for this project was the TEC1-12706 (
Figure 3). This unit was the lowest cost unit (AUD 3.21 per module) readily available online with operational characteristics suitable for experimentation. It had a 60 W cooling capability at nominally 12 V and 6 A. Further information and specification data are readily available in [
23,
24].
3. Experimental Test on a Motor and the Results
Previous research [
22] by the authors used TECs to heat a core sample from a section of a motor’s inner core encompassing the winding slot area. This paper explores the previously untried application of TECs to heat a single phase 3/4HP (559 W) induction test motor. Four systems were employed namely: resistors, heat sinks, heat pipes, and a water heat sink. This paper is not a comparison between the systems but rather an application of each system to gauge its effectiveness to heat up the motor from a stabilized room temperature.
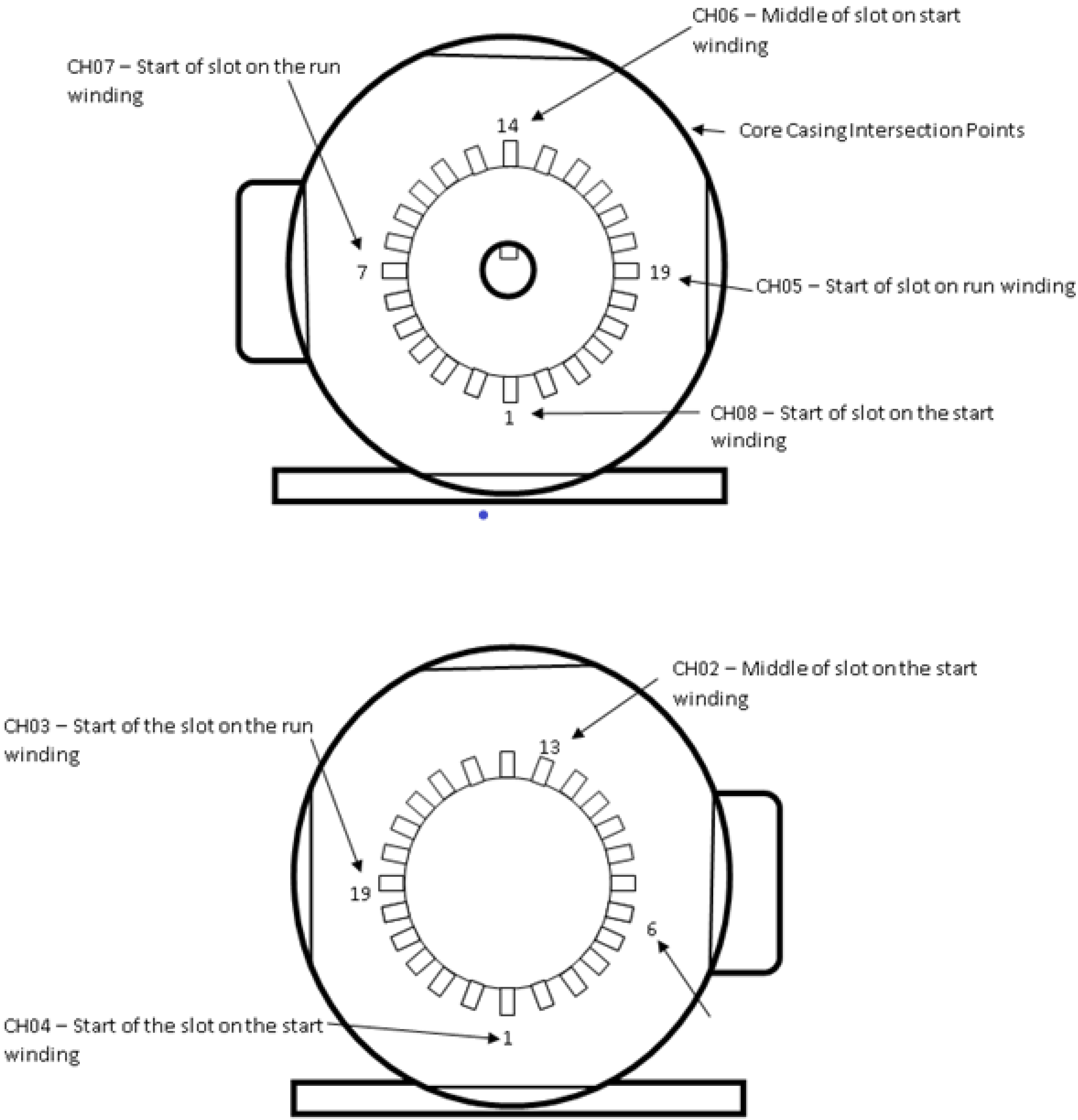
A motor with the same arrangement as a standard induction motor was selected as the test motor. The motor was dismantled and serviced (cleaned and varnished for mechanical stability, with new bearings installed), and eight new thermocouples were added to the windings as in
Figure 6, to monitor and record the winding temperatures when under test. The slot area is a critical thermal area, and all data presented in this paper were taken from slot 13 (CH02, see
Figure 6), as a thermocouple was inserted into the centre of the slot.
The test motor was switched off and allowed to stabilize at room temperature. There were four different configuration arrangements:
Resistive heating;
TECs with small heat sinks;
TECs with heat pipe coolers;
TECs with water circulation heat sinks.
With the motor at room temperature, the heating power supply was applied to each system. The polarity to the TECs was established so that the TEC pumped heat into the motor (the side against the motor became hot). The current supply to the configuration was adjusted in 0.5 A steps, with the input power to the resistor heaters and the TECs, and the resulting temperatures were recorded for each of the applied systems.
3.1. Resistive Heating
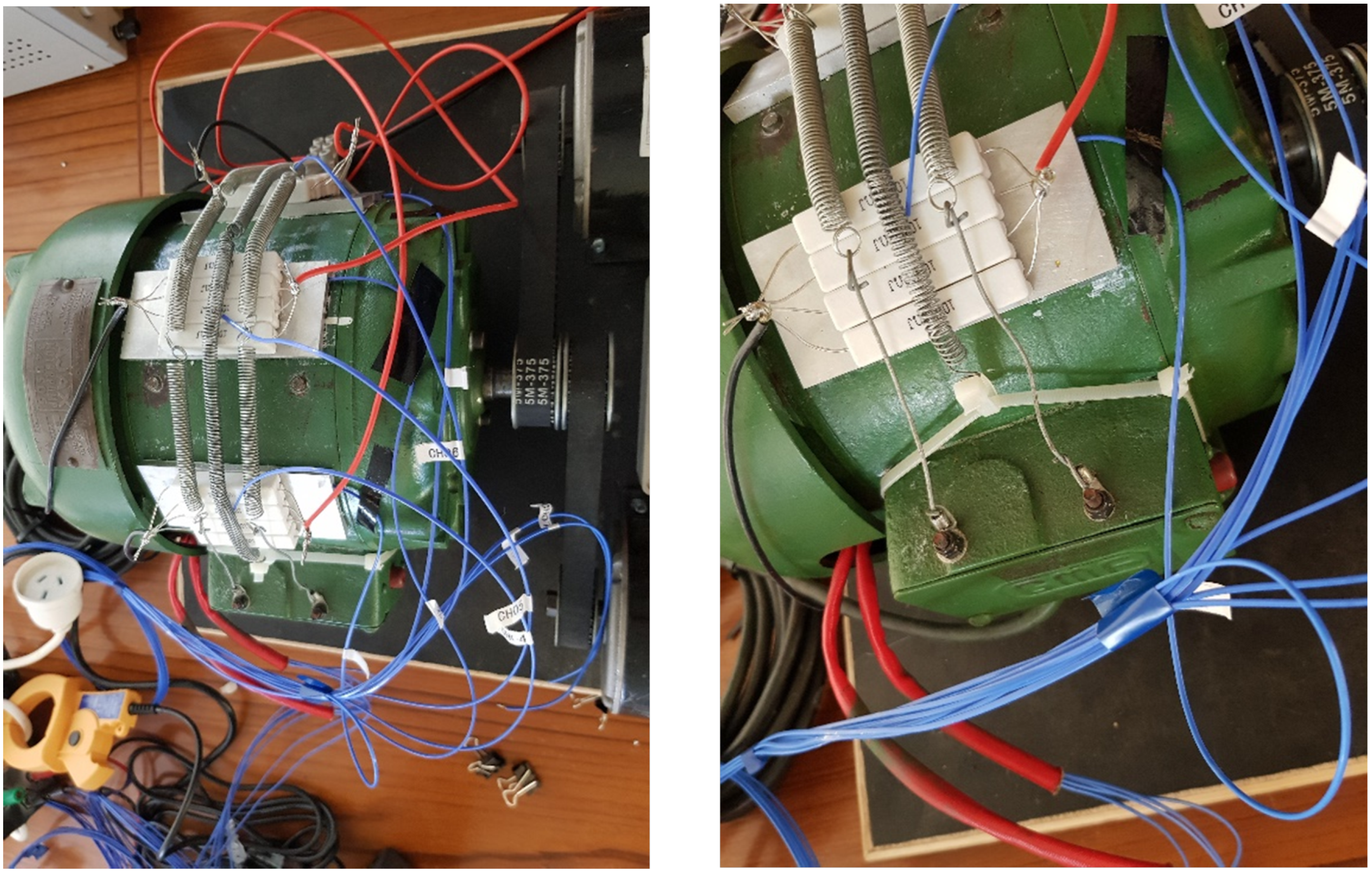
The resistive heater system is the most common heating method in motors today. The resistive heating system used in this paper comprised three resistor heating banks attached to the outer surface of the motor (see
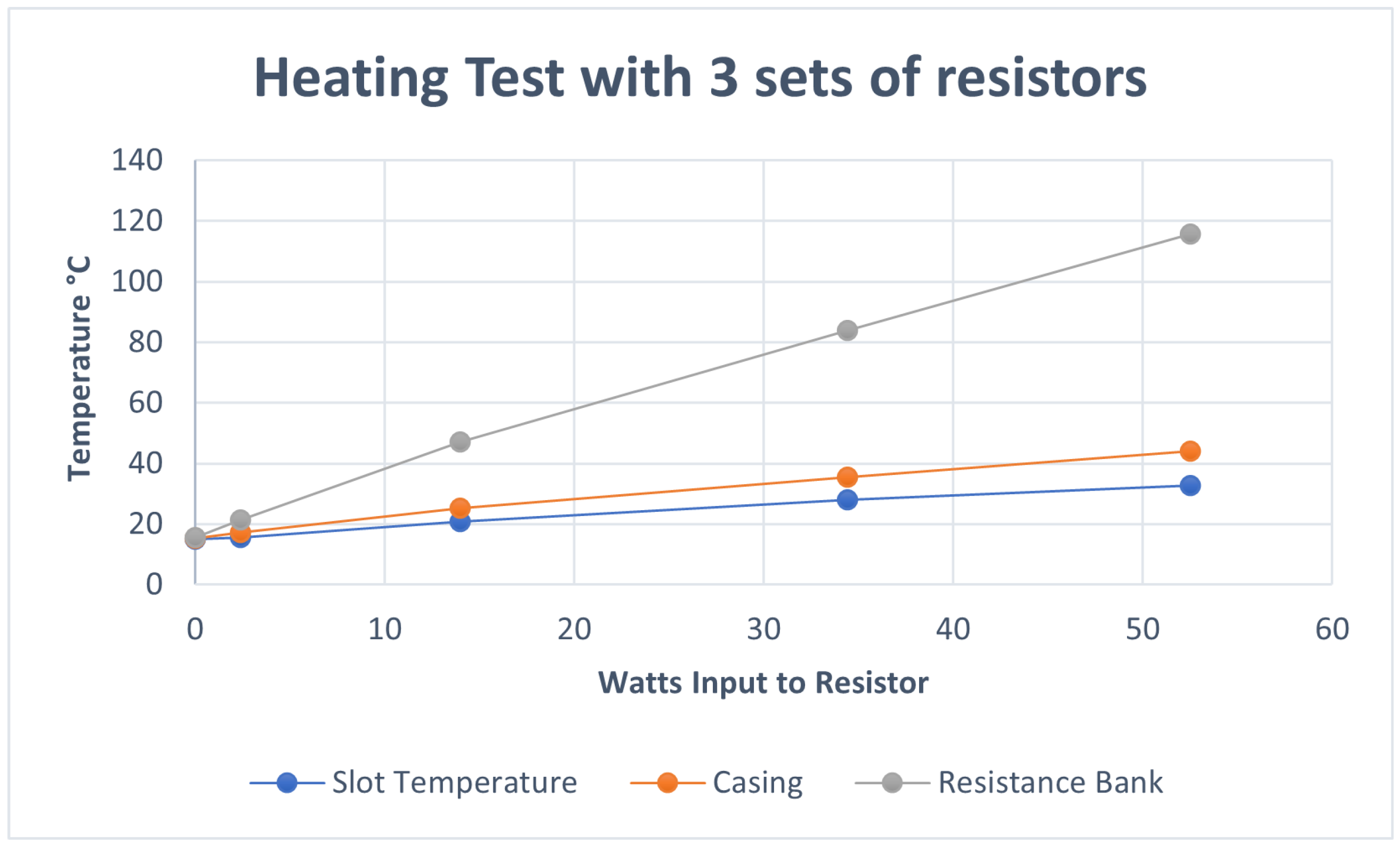
Figure 7). This arrangement heated the motor, the core, and the slot where the stator windings were inserted. Although applied in a different manner, as they are normally installed inside the motor under the windings, they did raise the winding temperatures. The slot, casing, and resistance bank temperatures at various total power inputs to the resistors were recorded and plotted in
Figure 8. At a nominal 50 W input, the slot temperatures reached 32.1
C as shown in
Figure 8, attaining thermal stability after 5 h.
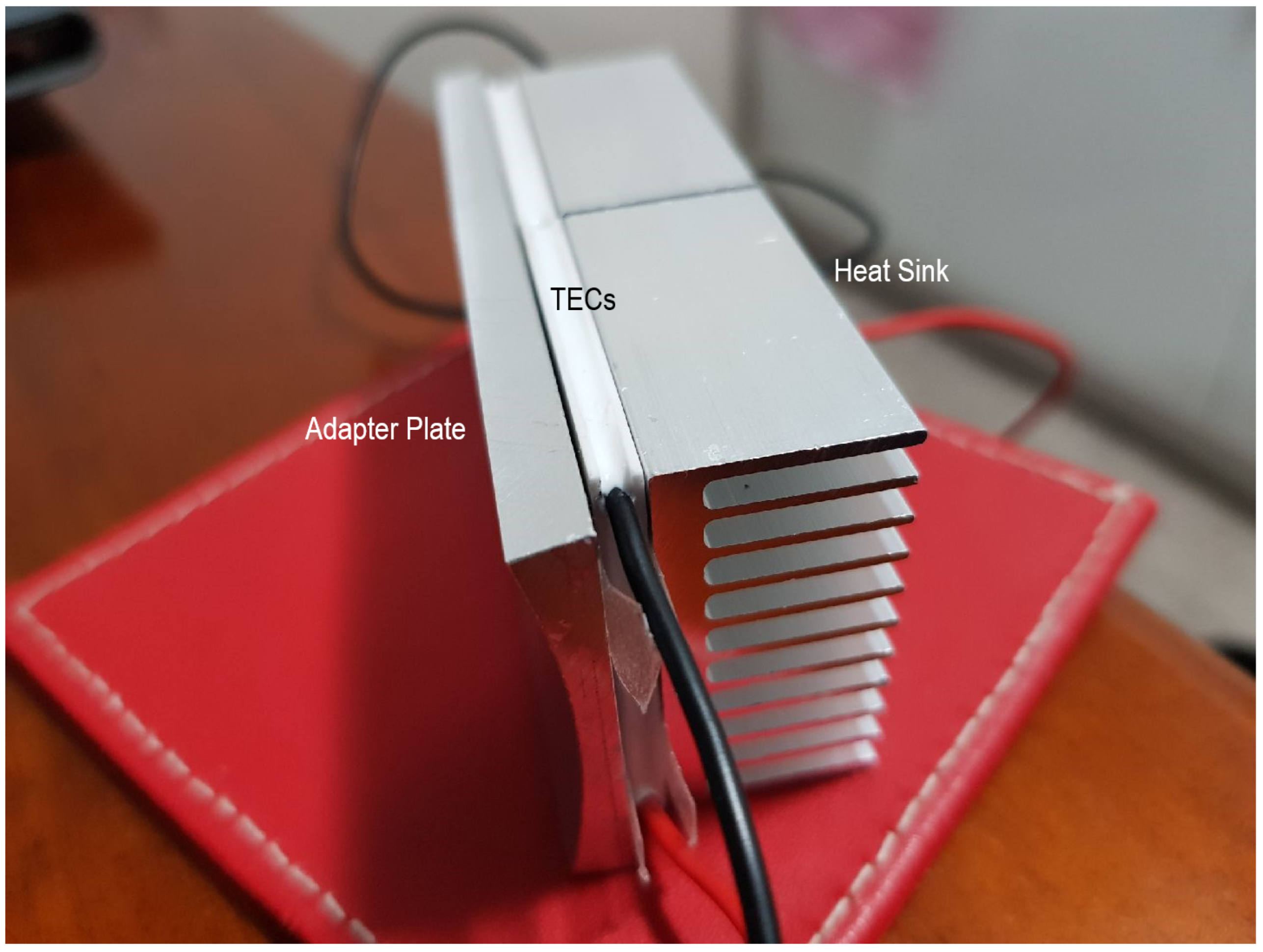
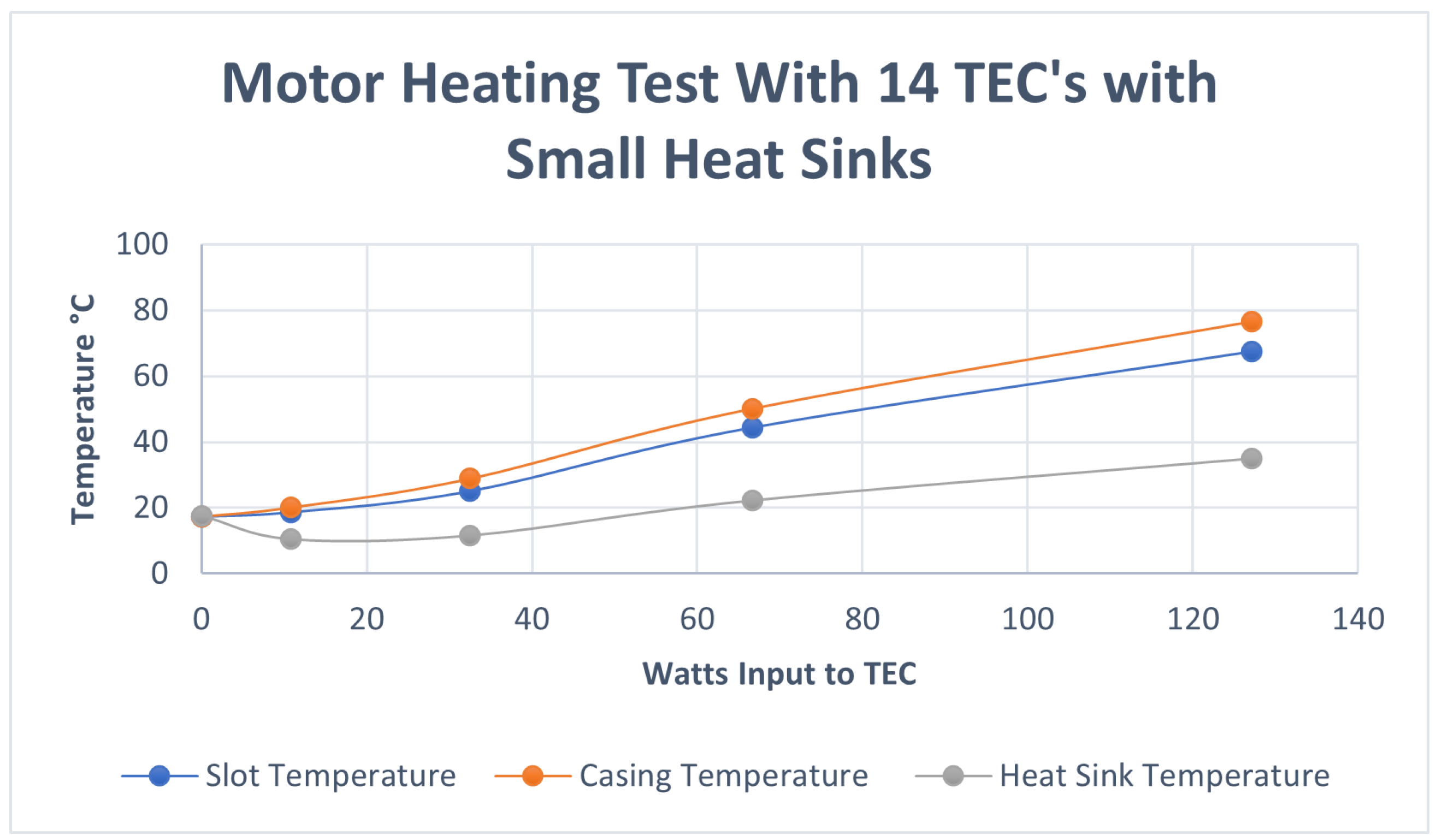
3.2. TECs with Small Heat Sinks
With this configuration, 14 TECs with small heat sinks were attached to the outer surface of the motor as shown in
Figure 9. The TECs with small heat sinks had a small footprint, which allowed the largest application of the units to the test motor. This enabled a large coverage (14 TECs) of the casing, which minimized the losses from exposed surfaces. The mounting arrangement of the TECs was via a curved aluminium adapter plate (
Figure 10), and the curve matched the diameter of the motor casing.
Figure 11 shows a plot of the slot, casing, and heat sink temperatures at various total power inputs to the TECs. For a power less than 60 W, the temperature of the heat sink dropped below the atmospheric temperature due to the extraction of the heat from the environment and pumping it into the motor, coupled with the small area of the heat sinks. The temperature of the heat sink increased slightly when the input power was above 60 W due to the Joule effect. At the nominal 50 W input, the winding slot in the core reached 34.95
C, attaining thermal stability after 4.5 h (
Figure 11).
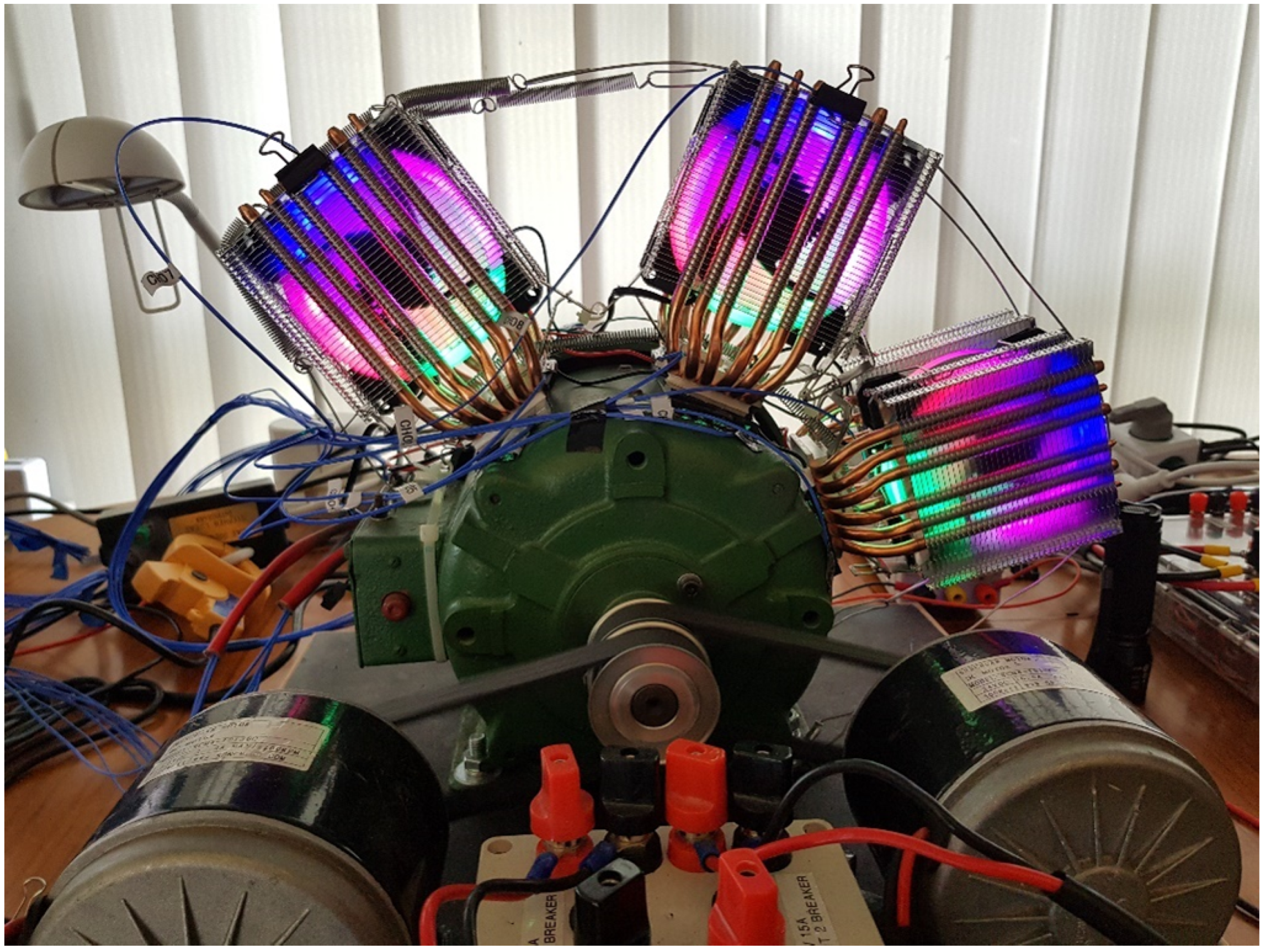
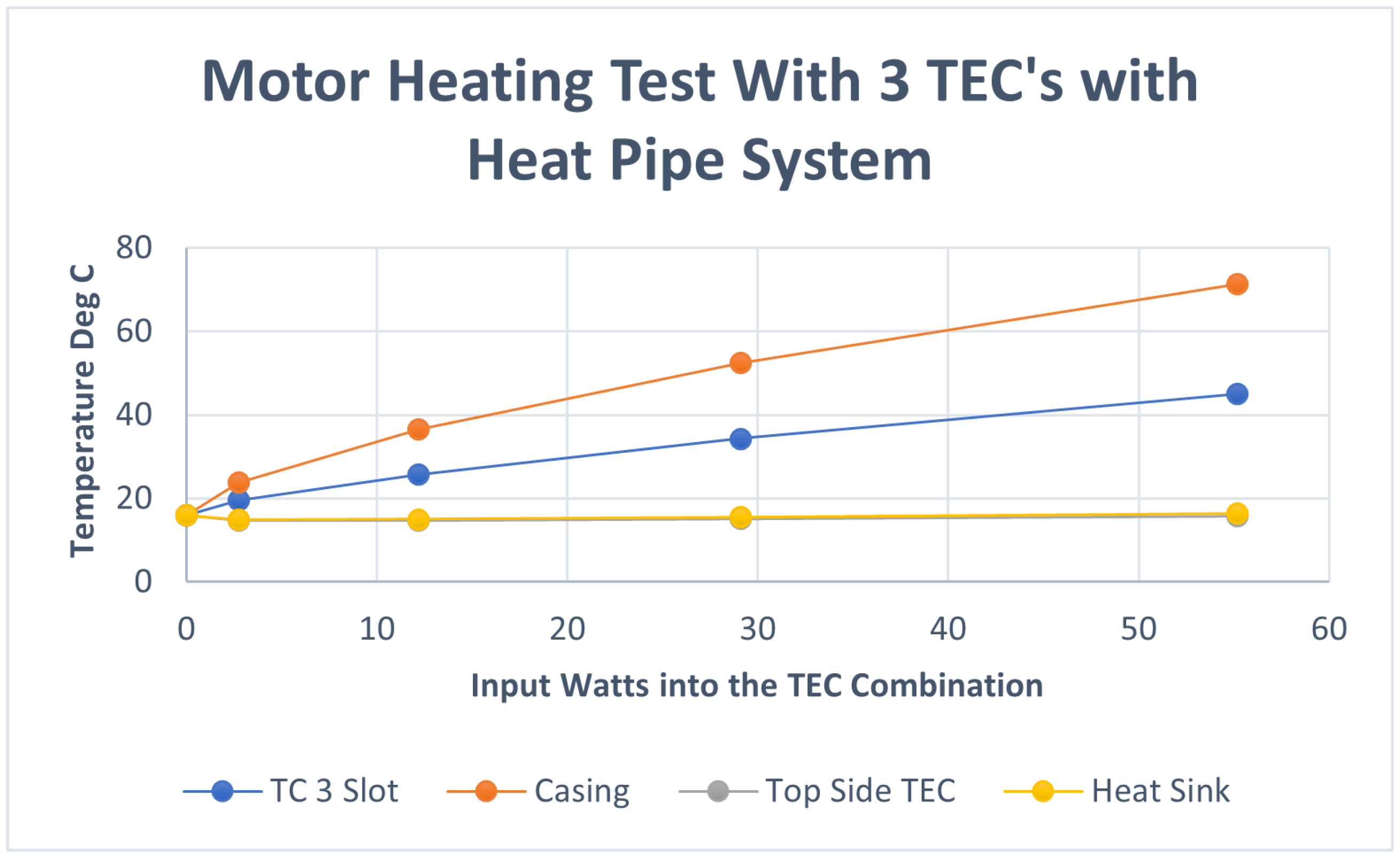
3.3. TECs with Heat Pipe Coolers
This configuration consisted of TECs with heat pipe coolers attached to the outer surface of the motor (see
Figure 12). The system utilizing the heat pipe heat exchangers [
25,
26] took up room; hence, only three TECs were used in this configuration. The recorded slot, casing, TEC top side, and heat sink temperatures at various total power inputs to the TECs are shown in
Figure 13. At the nominal 50 W input power to the inner core area, the motor slots reached 42.93
C, attaining thermal stability after 5 h (
Figure 13).
The system, because of the greater area of the heat sinks, was more efficient.
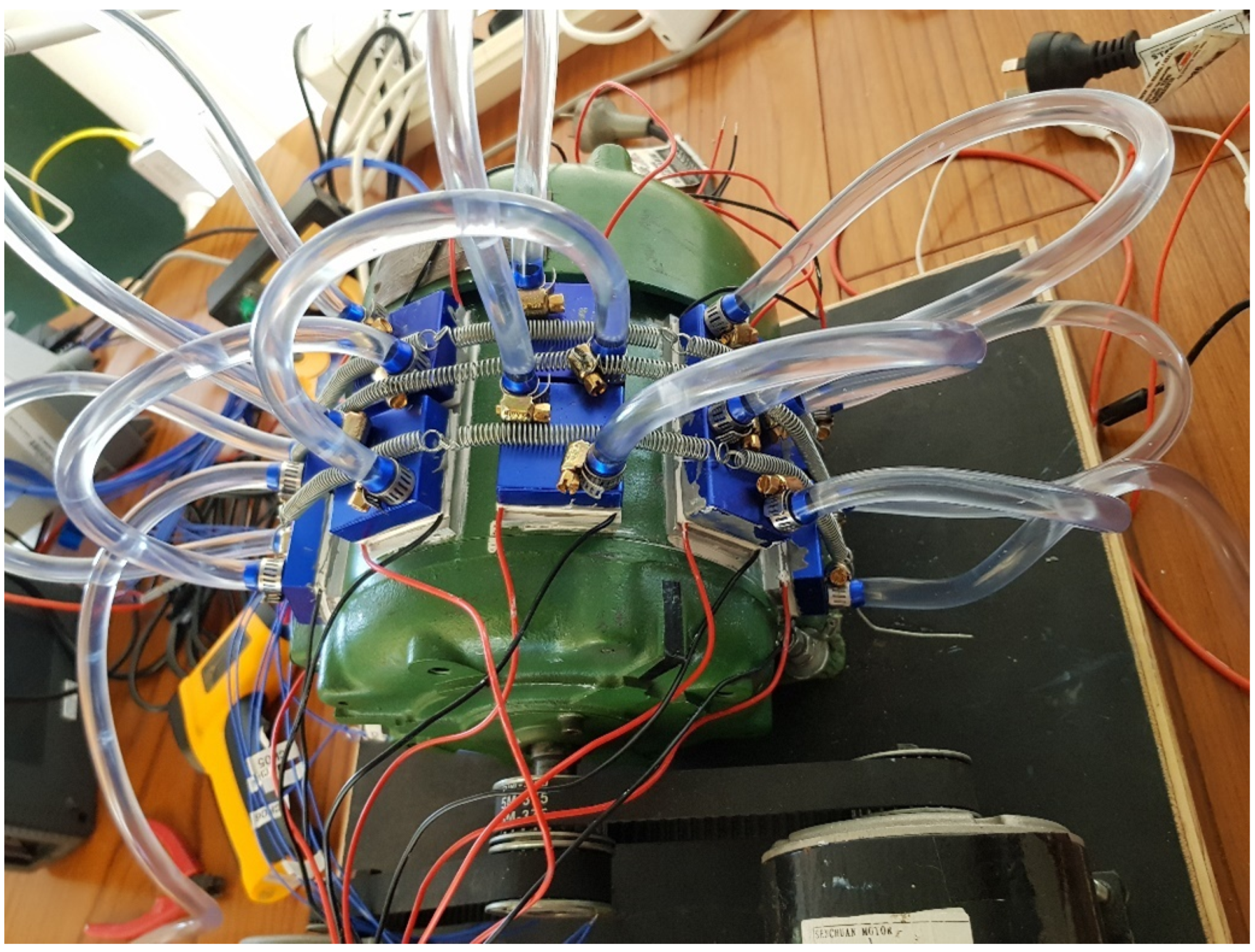
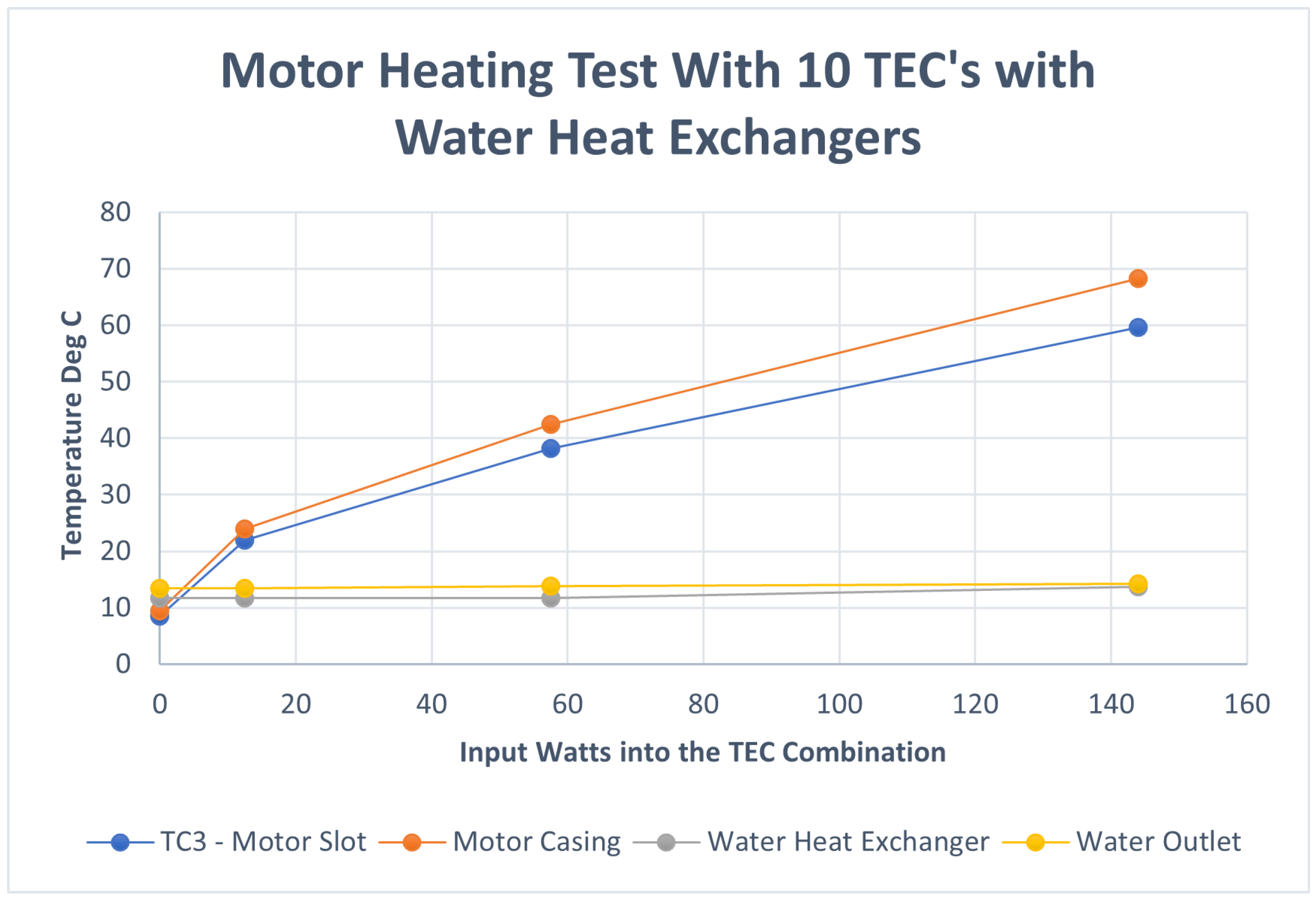
3.4. TECs with Water Circulation Heat Sinks
The configuration considered here comprised TECs with water circulation heat sinks attached to the outer surface of the motor (see
Figure 14). The heating system consisted of 10 TECs with water heat sinks and water running at 12
C. This system worked similarly to the TECs with the small heat sinks. The recorded slot, casing, heat exchanger, and water outlet temperatures at various total power input to the TECs are plotted in
Figure 15. With the water temperature at a low 12
C at the heat source, the TEC combination performance was slightly limited, but at the 50 W nominal input setting, it raised the inner core windings to 35.48
C, attaining thermal stability after 5 h (see
Figure 15).
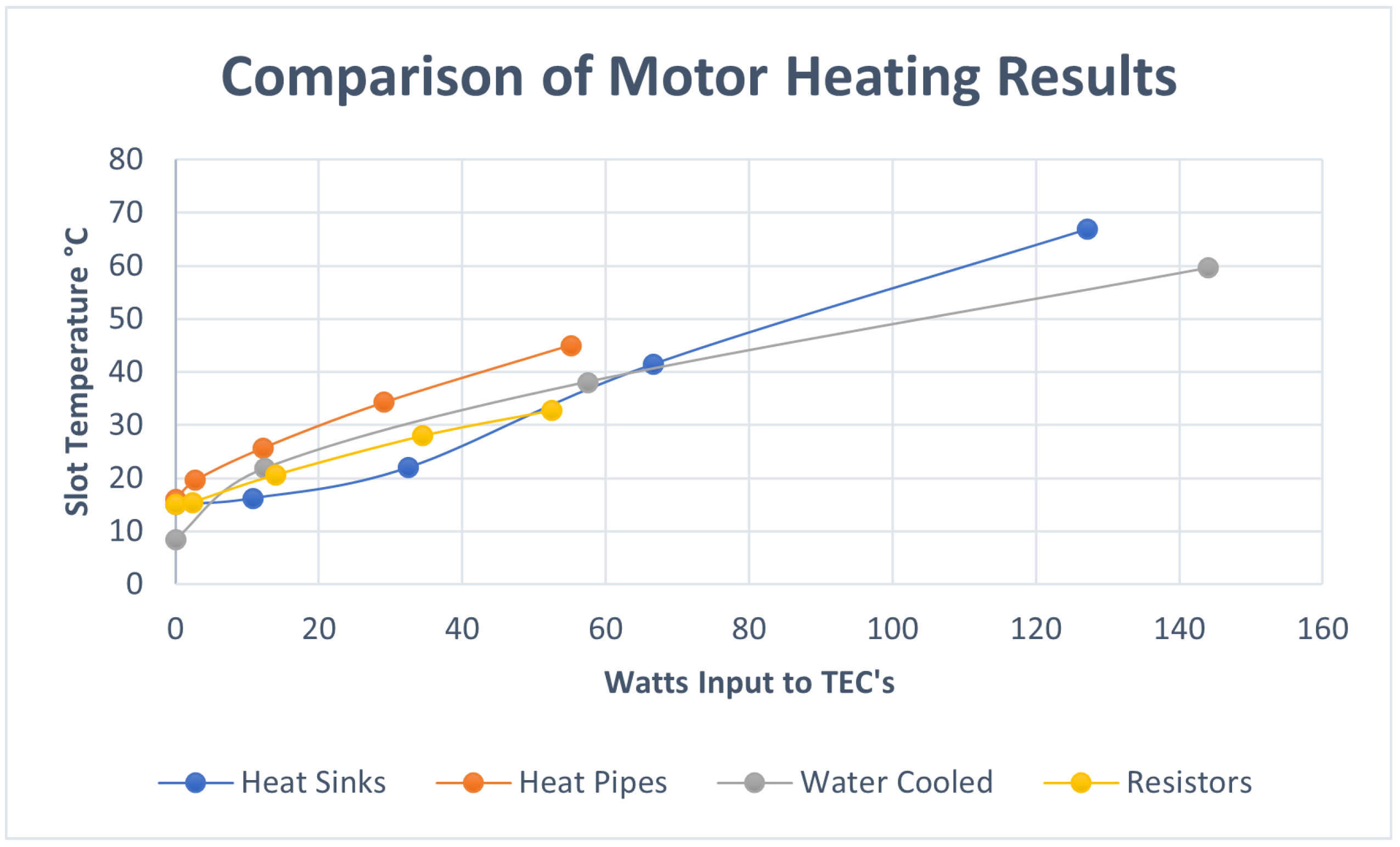
At 50 W nominal input power, the inner core and winding slot temperatures for all the heating systems are summarised in
Table 1. In addition, the slot temperatures at various input powers for all the heating systems are shown in
Figure 16.
4. Discussion
The resistive heating system, the most common system employed by manufacturers because of its low cost and ease of installation, is normally mounted internally. In this position, it heats the internal air, limiting its ability to heat the entire volume of the machine. There is thermal loss via the external surfaces, and the internal volume conducts the heat to these surfaces. This thermal path causes a thermal lag between the internal and external temperatures and limits the resistive heating systems’ ability to stop internal condensation. The resistive system arrangement used in this study attached the resistive heating elements to the outside casing of a motor, and as this was the normal radiating surface, in this position, they could not be insulated, thus, the losses to the surroundings were high. The location had one major advantage; it was attached directly to the steel core, which conducted the heat quickly to the inner winding slot area. The results showed that at the nominal input power of 50 W, the winding temperature reached 32.14 C, only a few degrees cooler than the other systems despite its simplicity. The results also showed that this system could make a difference, especially to very small motors where there is not enough room to internally mount resistive heaters.
In the TEC and heat sink system, there was a combination of seven adapter plates and 14 TECs with heat sinks. This system was simple to install with the adapter plates. This enabled the largest coverage of the external surface, reducing the surface losses; however, the very small heat sinks limited the TEC’s ability to transfer or collect and pump the heat into the core. These worked well, and the slot temperature was easily able to be pushed up to 68 C. At the nominal input power of 50 W, the inner core reached 34.95 C. The main limitation was the very small size of the heat sinks. Larger units would have improved the TEC’s ability to draw heat from the heat sink; however, this inexpensive system worked well and proved the concept.
In the TEC and water circulation heat sink system, there were 10 TECs. This system was difficult to assemble and install, as water tubing with tube clamps was required to be fitted to each heat sink. In a water cooled system, there is a lot of extra equipment such as pumps, radiators and fans. This equipment significantly increased the required footprint for the installation and added considerably to the system costs and particularly the maintenance costs. The results were comparable with the heat sink system. The cold water holding the heat exchangers at 12 C limited the ability of the TECs to pump heat into the motor, but at the nominal input power of 50 W, the inner core reached 35.48 C.
From
Table 1, the three TECs connected to the fan cooled radiators via heat pipes resulted in the best result compared to the other heating systems. With a nominal input power of 50 W, the inner core reached 42.95
C. This was achieved with only a small area covered by three TECs. The advantage of this configuration was that it connected the TECs via the casing to the core, which efficiently conducted the heat to the inner core area, where the stator winding was located. This system also demonstrated the potential to locate the heat exchangers away from the motor. In confined conditions such as electric cars and portable compressor stations, this would enable the heat exchangers to be in a more appropriate area than the motor location. The disadvantage, however, is that the fan cooled radiators need to be located in an open area and are fairly large.
The three TEC heating systems employed in this paper are commonly found in thermal control applications. The mounting of these systems to the outer surface or flat surfaces is simple as the TECs are flat units. For round motors, a simple adapter plate can be used. For ribbed motors, a more complex adapter plate is required. These systems can be used post manufacture.
The TEC systems are inexpensive and have a major advantage over the existing heating systems in that they can pump heat directly into the volume of the motor, raising the temperature well beyond the dew point and eliminating the condensation issues. For new machines, the incorporation of TECs could be implemented during the design phase and could be placed between the core and casing.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}