Abstract
As a representative new energy source, solar energy has the advantages of easy access to resources and low pollution. However, due to the uncertainty of the external environment, photovoltaic (PV) modules that collect solar energy are often covered by foreign objects in the environment such as leaves and bird droppings, resulting in a decrease in photoelectric conversion efficiency, power losses, and even the “hot spot” phenomenon, resulting in damage to the modules. Existing methods mostly inspect foreign objects manually, which not only incurs high labor costs but also hinders real-time monitoring. To address these problems, this paper proposes an IDETR deep learning target detection model based on Deformable DETR combined with transfer learning and a convolutional block attention module, which can identify foreign object shading on the surfaces of PV modules in actual operating environments. This study contributes to the optimal operation and maintenance of PV systems. In addition, this paper collects data in the field and constructs a dataset of foreign objects of PV modules. The results show that the advanced model can significantly improve the target detection AP values.
1. Introduction
The combustion of fossil fuels is a significant contributor to greenhouse gas emissions, which contribute to global temperature increases and climate change. This phenomenon has adversely impacted the natural environment, including increases in sea levels, more frequent and intense natural disasters, and changes in weather patterns [1]. Fossil fuel extraction can also lead to water and land contamination, including oil spills, land degradation, and the release of toxic chemicals into water sources and soil. The extraction, processing, and combustion of fossil fuels can produce harmful gases that severely impact human health [2,3,4]. In this context, renewable energy sources, such as solar, wind, geothermal, tidal, and nuclear energy, have received significant attention and development due to their safety, cleanliness, and renewable properties [5,6,7].
Renewable energy generation has experienced significant growth on a global scale in recent years. There have been significant investments in and deployments of renewable energy sources, such as wind, solar, hydropower, and geothermal systems. According to the International Energy Agency (IEA), in 2020, renewable energy made up nearly 90% of new power-capacity additions globally. Driven by decreasing costs and supportive policies in many countries [8,9], solar energy has seen the greatest increase in its use and is being widely adopted due to its advantages such as no danger of depletion, the absence of noise and pollution emissions, and safety and reliability. The cost of photovoltaic (PV) power generation technology has decreased significantly in recent years, making it more affordable for households [10] and businesses to install solar panels. According to the International Renewable Energy Agency (IREA), the cost of PV electricity has fallen by over 85% since 2010. The increasing affordability of PV power generation technology has led to a rapid increase in installations globally [11]. According to the IEA, the global installed capacity of PV had reached 675 GW by the end of 2020.
PV generation systems are the basis of PV power generation technology and are mainly composed of PV modules, fixed supports, inverters, sink boxes, distribution boxes, data acquisition equipment, communication devices, and cables. PV modules in PV generation systems serve the purpose of collecting sunlight and converting it into energy and thus play a crucial role in the overall energy conversion efficiency of the system [12]. PV power efficiency refers to the amount of solar energy that can be converted into electricity by PV cells. The efficiency of PV power systems is usually measured as a percentage, ranging from about 15% for older technologies to more than 22% for the most advanced cell designs [13]. However, under actual operating conditions, the efficiency of PV generation systems often falls short of expectations due to the variability and complexity of the environment and the shading of PV modules by foreign objects [14].
Foreign object shading is a critical factor in the loss of solar power since it results in the PV module receiving less irradiance (in the case of uniform distribution of foreign bodies) or localized shading on the PV module if the foreign bodies are not evenly distributed [15]. Foreign object shading of modules can be caused by various mechanisms such as building shadows, dust, bird droppings, and leaf accumulation [16,17,18]. Foreign object shading is not a failure in the physical sense of PV modules, but it is one of the most critical problems affecting the performance of PV generation systems. Foreign object shading reduces the transmission of incident radiation through the cover glass of the PV module, reducing the amount of solar radiation that can be converted to electricity. Depending on where the PV system is deployed, energy losses of 3% to 50% can be experienced due to the accumulation of foreign matter on the surface of the PV module [19,20,21]. In practice, in order to ensure system stability and efficiency, PV generation systems are often placed in well-lit unoccupied open areas to avoid shading from buildings. Research related to nano-coatings on the surface of PV modules can help to address the problem of dust accumulation [22], and natural rainfall can also help to mitigate dust accumulation. However, unlike building shading and dust, bird droppings and leaf shading are difficult to avoid in real environmental situations and are always present during the operation of PV systems. Natural rainfall is often insufficient to alleviate this problem. At the same time, bird droppings and leaf shading on PV modules often result in very small localized shading, which can lead to the formation of hot spots [23], which can damage PV modules and affect their lifetime. Therefore, it is necessary to monitor and detect both bird droppings and leaves on the surfaces of PV modules. Traditional inspection methods are often performed manually by professionals who drain and clean PV systems at fixed locations and times. However, this inspection method is costly, inefficient, and prone to visual fatigue, and the inspectors need to rely on their personal experience and common sense to carry out the inspections. In addition, the inspection standards vary from person to person, making it impossible to produce uniform and objective inspection results [24,25]. In conclusion, the real-time monitoring and inspection of the surface condition of the components of PV generation systems are essential to maximize power production and improve the reliability and service life of PV power plants. It is necessary to develop operation and maintenance strategies that can detect anomalies in the early stages so that appropriate action can be taken for deteriorating modules. In this context, the use of image-based computer-vision target detection methods [26] for foreign object detection has major advantages in terms of economics and stability.
Currently, research on the detection of foreign object shading on the surfaces of PV modules utilizes image-based analysis methods. The three most commonly used image-based research methods are electroluminescence imaging [27], infrared imaging [28], and visible light imaging [29,30]. Abdelilah Et-taleby et al. proposed a model combining two machine learning algorithms, convolutional neural network (CNN) and support vector machine (SVM), which was used to detect and classify PV module faults and achieved a high rate of accuracy. The database used was the electroluminescent images of PV modules [27]. Tianyi Sun et al. proposed a novel PV module fault detection method based on an improved anchor and prediction head for a YOLOv5 network. For PV module images in the infrared spectrum, the mechanism of hotspot formation on PV modules during actual operations was studied and hotspot targets were classified to facilitate the identification and detection of PV panel hotspots [28]. Fadhel et al. applied the state-of-the-art improved YOLOv5-based target detection image analysis method to detect surface damage on wind turbines and PV modules. Furthermore, they achieved excellent recognition accuracy for visible image data with different resolutions, from PV modules to wind turbines, [29]. Robinson Cavieres et al. developed a model that utilized visible light images of PV modules to identify each component present in the image, separate each PV module from the image, evaluate its operation, and determine the power loss due to defacement or partial shading using the segmentation, homogenization, and regression operations of neural networks. This is important for ensuring the optimal operation and maintenance of power generation PV systems [30]. This paper prefers the target detection method based on visible light images due to its advantages of inexpensive equipment used to acquire images, simplicity of operation, easy access to data, and the possibility of real-time monitoring. In recent years, there have been rapid developments in detection algorithms using deep neural networks. Currently, deep learning-based target detectors can be divided into a one-stage series of detectors represented by RCNN [31] and a two-stage series of detectors represented by YOLO [32], most of which employ manually crafted components such as IOU-based prior frame generation and non-maximal suppression processing [33,34]. In 2020, Nicolas Carion et al. [35] applied the Transformer structure to the field of target detection and proposed the DETR detector, which eliminated the manual components and implemented an end-to-end target detector. Furthermore, Zhu et al. proposed a Deformable DETR detector by incorporating deformable convolution [36] into DETR and finding more flexible and variable sampling points by learning offsets. The Deformable DETR detector achieved good small-target detection performance and could detect small and medium target objects similar to PV module foreign objects.
In order to improve the performance of neural networks, several existing studies have attempted to enhance DETR. Jiangwu Ding et al. proposed a feature-enhanced object detection framework with a Transformer (FE-DETR) and added a convolutional block attention module (CBAM) between the residual blocks [37]. This framework was applied to the production line of medical protective clothing. For the recognition of armored targets in complex battlefield environments, Jianhua Dai et al. proposed the GCD-YOLOv5 algorithm [38]. They added a CBAM to improve the feature extraction capability and then incorporated DETR to optimize YOLOv5 and meet real-time requirements. The above study combined DETR and a CBAM to obtain better feature extraction ability and local attention but the improvement in the detection accuracy of small targets was not obvious. In this paper, we focus on improving the detection capability of DETR by combining it with a CBAM for the detection of local shading on PV modules, particularly small targets. In addition to improving the model structure, this paper uses transfer learning to enhance the generalization ability of the model in complex scenarios. Studies have shown that the performance of deep neural networks depends on the size and quality of the training dataset [39]. The categories of existing large-scale public datasets are fixed and do not contain objects such as leaves, bird droppings, etc., which are common in PV anomaly detection, so neural networks trained on public datasets cannot achieve good performance in PV foreign-object-detection scenarios [40]. To address these issues, a dataset was collected and constructed in the field, covering different foreign object scenarios on PV modules, including different poses, lights, and angles. To allow the model to learn broader and more general features, this paper adopts a model-based transfer learning approach to transfer the model from the large-scale public Common Objects in Context (COCO) dataset [41] to the small-scale PV module foreign object dataset (Anomalous Object Dataset (AOD)), which was collected and constructed in the field for this paper. Transfer learning gives the model better feature extraction capabilities and also allows the model to adapt well to diverse realistic scenarios. In this paper, we mainly focus on:
- (1).
- Optimizing the Deformable DETR model and introducing multi-scale information based on local attention to improve the small-target-detection performance of the model;
- (2).
- Using the transfer learning method to improve the adaptability of the model to scenes without increasing the manual labeling work.
2. Problem Description
2.1. PV Module Model
The basic unit of a PV module is the PV solar cell. An ideal PV solar cell model consists of a parallel p-n junction and a simulated current source that generates carriers [26]. Series and shunt resistors are also added because of the practical considerations of PV solar cells. The PV solar cell model is shown in Figure 1.
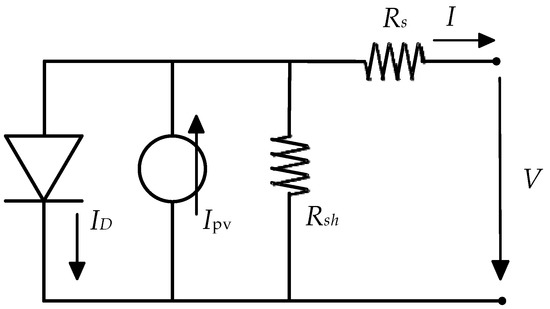
Figure 1.
Electrical model of a PV solar cell.
In order to meet the actual grid-connected voltage requirements of a PV power system, a typical crystalline silicon PV module consists of 60 or 72 PV cells connected in series. The circuit structure of a 60-cell PV module is shown in Figure 2. Every 20 cells are connected in parallel with a bypass diode to prevent the impact of a single faulty PV cell on the entire circuit.
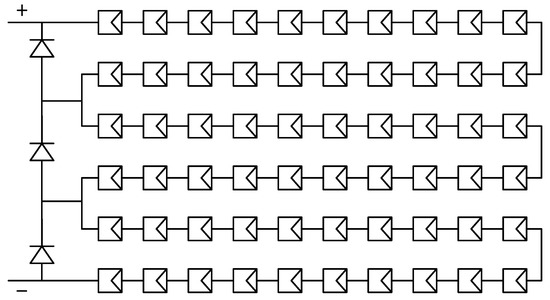
Figure 2.
PV module internal circuit structure.
2.2. Effect of Partial Shading on PV Modules
When the surface of a PV module is partially shielded, it can reduce the module’s ability to absorb light energy and affect the photoelectric effect of the silicon semiconductor. As a result, the series resistance of the module increases and the current through this part generates heat. If the module is shielded for a long time, heat accumulation can occur, leading to the formation of hotspots in the PV panel. As shown in Figure 3, the number of hotspots will gradually increase if the PV module operates in this state for an extended period. In addition, all the electricity generated by the normal operation of the PV cells is consumed in the non-normal working state of the PV solar cells. This can reduce the efficiency and service life of the PV module and affect its output electricity. Therefore, the real-time monitoring and detection of foreign matter shading on the surfaces of PV modules are essential for providing necessary data references for the safe operation, maintenance, and cleaning programs of PV modules.
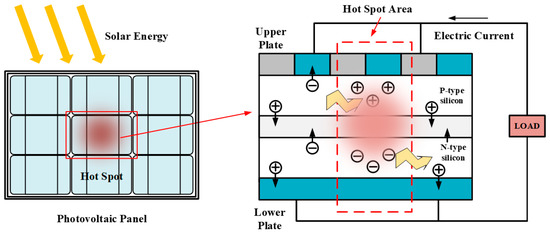
Figure 3.
The process of the formation of hotspots on PV solar panels.
3. Methodology
3.1. Deformable DETR Network
The architecture of DETR is very compact and uses a convolutional neural network as the backbone network to extract image feature mappings. The Transformer structure is then used as the basis for the target detector, and the global modeling capability of the Transformer is used to replace the hand-crafted components, achieving results comparable to those of Faster RCNN on the COCO dataset.
In 2021, Deformable DETR introduced a deformable convolution module into DETR to reduce the number of iterations required for network convergence to one-tenth of the original one, while improving the accuracy of small target detection by 6% [36].
In order to further improve the performance of the network and adapt it to the problem of PV module foreign object detection, in this paper, we further optimize the Deformable DETR network by adding a convolutional block attention module (CBAM) [42] to the original model so that the model has better detection capability for small-size foreign objects. In this paper, the model is named IDETR and Figure 4 shows a schematic diagram of the IDETR model.
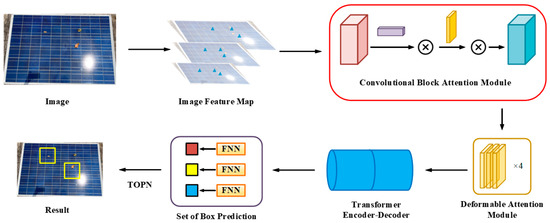
Figure 4.
IDETR model structure.
3.2. Convolutional Block Attention Module
It has been shown that although the Transformer has a good global modeling capability, it experiences difficulties in capturing local image information and requires a lot of time for training to focus the weights from the global to the local features. Most of the foreign objects in the PV module foreign object detection problem are small in size and their features are concentrated in local areas, which means that the original model is unable to adequately perform the task of foreign object detection. Although the original Deformable DETR uses a deformable attention module to supplement the local modeling capability, the variable attention module targets the features after feature mapping serialization, which has lost spatial information and does not fully represent the original image information. Based on the above problems, this paper attempts to combine the global and local modeling capabilities to compensate for their respective shortcomings and improve the performance of the model. To compensate for the deformable attention module’s deficiency in spatial information, this paper introduces a convolutional block attention module (CBAM) between the feature extractor and the Transformer network to preprocess the features input to the encoder, highlighting the effective features and ignoring the invalid ones.
As shown in Figure 5, the convolutional block attention module (CBAM) is a simple and effective attention module for feedforward convolutional neural networks. It contains two components, a channel attention module (CAM) and a spatial attention module (SAM).
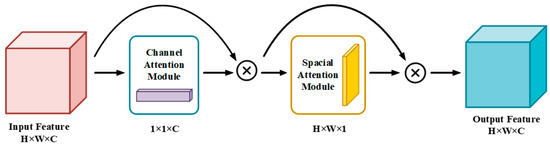
Figure 5.
Convolutional block attention module.
3.2.1. Channel Attention Module
The channel attention module can highlight the key channels among the multi-channel features. As shown in Figure 6, the input feature mapping passes through the space-based maximum pooling layer and average pooling layer and then enters the multilayer perceptron (MLP). The output features of the MLP are summed and then passed through the sigmoid activation layer to generate the final channel attention feature. The channel feature map and the original input feature map are multiplied to provide the input for the subsequent spatial attention module. The formula is as follows:
where represents the input feature, represents the sigmoid activation function, and and represent the space-based average pooling operation and maximum pooling operation. MLP is the multilayer perceptron, and and represent the weights.
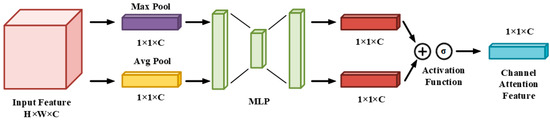
Figure 6.
Channel attention module.
3.2.2. Spatial Attention Module
The spatial attention module can highlight key regions in space. The input is the feature map processed by the channel attention module. As shown in Figure 7, first, the input feature map undergoes channel-based maximum pooling and average pooling and the two results are then stitched on the channel. Then, the feature map is downscaled to a single channel using a convolutional network and the spatial attention feature is obtained through a sigmoid activation layer. Finally, the spatial feature map and the original input feature map are multiplied to output the result, which is given by the following equation:
where represents the sigmoid activation function and represents a size convolution kernel.
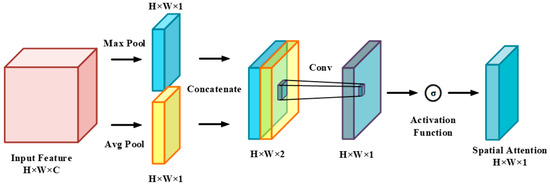
Figure 7.
Spatial attention module.
In this paper, the spatial attention module uses a convolutional kernel of size 7 × 7, which performs better than a convolutional kernel of size 3 × 3. The CBAM is inserted between the backbone network and the Transformer network and is used with the normalization layer.
3.3. Transfer Learning
The performance of deep neural networks relies on iterative fitting on large-scale datasets to learn nonlinear relationships. The Internet provides many large-scale training sets that are large in number and type and can help deep neural network models to obtain excellent feature extraction capabilities.
However, the target categories provided in standard public datasets are fixed and immutable, and the models trained on these datasets can only detect targets in the fixed categories. Therefore, the models trained on these datasets cannot be directly applied to the PV module foreign object detection problem. In this paper, the Anomalous Object Dataset (AOD) is field sampled and constructed for the optical module foreign object detection problem and a transfer learning approach is used to transfer the model from the public dataset (COCO) to the lightweight dataset (AOD). The transfer learning process is shown in Figure 8.
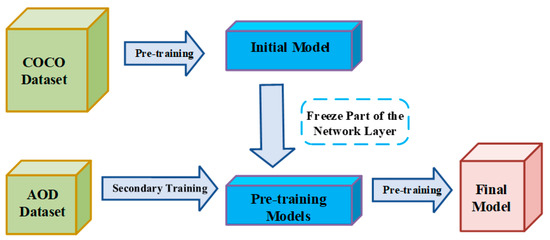
Figure 8.
Transfer learning process.
In this paper, the large-scale dataset is defined as the source domain and the small-scale dataset is defined as the target domain. Using transfer learning methods helps the model to learn prior knowledge on the source domain and apply it to the target domain. Transfer learning methods can be divided into sample-based, feature-based, model-based, and relationship-based methods, of which three, sample-based, feature-based, and relationship-based methods, mainly target transfer problems with the same target class but belonging to different domains. In this paper, the public dataset and the dataset constructed specifically for this paper have different categories so the model-based transfer method is adopted.
The model-based transfer approach achieves better adaptation of the model by mining the shared parameter information from the source and target domains. It is based on the assumption that the source and target domains share a priori distributions of hyperparameters, which is reasonable in practice because the underlying features of different domains, classes, and shapes of targets are the same such as points, lines, right angles, colors, etc. Based on this assumption, transferring the model trained on the source domain to the target domain can help the model converge quickly on the target domain.
In this paper, we first use the large-scale public dataset (COCO) to help the model achieve a good feature extraction capability, and then the trained model is trained twice on the small dataset constructed specifically for this paper. During the secondary training, the parameters of the shallow network are selectively frozen so that these parameters are not updated with the training. Experimentally, it is demonstrated that the performance of the model is enhanced by the transfer learning operation.
4. Results
4.1. Data Preparation
In this paper, we addressed the foreign object shading detection problem of PV modules. The model was first trained on a standard public dataset and then transferred to a small dataset (Anomalous Object Dataset (AOD)). The standard public dataset used is the COCO dataset, which contains 330,000 images with 80 target classes, as shown in Figure 9. The AOD dataset, which contains 631 images, covering common foreign objects such as leaves and bird droppings, is shown in Figure 10.

Figure 9.
Schematic diagram of COCO [41] dataset model. Reprinted with permission from Ref. [41]. 1 January 2014, Tsung-Yi Lin, Michael Maire et al.
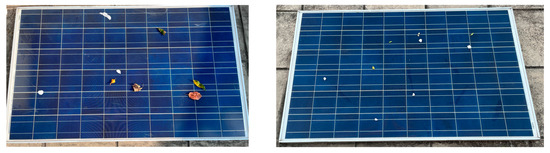
Figure 10.
Schematic diagram of AOD dataset model.
4.2. Experimental Setup
In this paper, ResNet-50, pre-trained on the ImageNet dataset, was used as the backbone network. The hyperparameters in the model obeyed the original configuration of Deformable DETR. The loss values used for training the network were divided into three subsets, the box loss value, label loss value, and GIOU loss value. The three weights were 2, 5, and 2, respectively, and the final loss value used was the sum of the three weights. The loss function used was the focal loss, with a parameter size of 2 for the bounding box classification, and the final number of predicted boxes was set at 300. By default, the model was trained for 200 cycles and the learning rate decayed by a factor of 0.1 and 0.01 at the 75th and 150th periods, respectively. In addition, the Adam optimizer was used with an initial learning rate of 0.0002. The deep learning framework used was Pytorch and the hardware platform was an NVIDIA RTX 2060.
We used the settings of the COCO dataset, and the definitions of large, medium, and small targets are shown in Table 1.

Table 1.
Definition of small targets in the MSCOCO dataset.
4.3. Comparison with Other Models
4.3.1. Model Performance Comparison
Average Precision (AP) is a commonly used metric to measure the performance of target detection algorithms. It measures the accuracy of successful network detection within a range of 0 to 1. Different IOU thresholds affect the magnitude of the AP value, and to avoid experimental bias, multiple thresholds were chosen to evaluate both algorithms used in this paper.
Table 2 shows the performance comparison of the model before and after adding the local attention module and transfer learning. The baseline model before the improvement is Deformable DETR, the model after incorporating the local attention mechanism is IDETR, and the model after adding transfer learning is labeled + T. APs, APm, and APl in the table refer to the AP values for small, medium, and large targets, respectively. The APs, APm, APl, ARs, ARm, and ARl values for the Deformable DETR model were 0.101, 0.250, 0.386, 0.100, 0.383, and 0.549, respectively. The APs, APm, APl, ARs, ARm, and ARl values for the IDETR model were 0.133, 0.301, 0.487, 0.162, 0.502, and 0.637. The APs, APm, APl, ARs, ARm, and ARl values for the IDETR + T model were 0.167, 0.442, 0.620, 0.175, 0.563, and 0.701. Compared to the Deformable DETR model, the performance of the IDETR model in terms of the AP values for large and small targets improved by 0.032. The average absolute performance of the IDETR + T model for large, medium, and small targets improved by 0.066, 0.192, and 0.234, respectively.
Table 2.
Comparison of results of algorithm metrics.
4.3.2. Model Performance after Introduction of Transfer Learning
In this paper, the model was first trained on a large-scale dataset and then the model was trained twice on a small dataset (AOD). In the secondary training, the learning rate of the network layers in the model, except for the category classifier and the coordinate regressor, was set to 0. No updates were performed in the secondary training.
If there were insufficient training data in the target domain, the model was prone to overfitting. This problem can be mitigated by learning features on the source domain and freezing the shallow model layers for secondary training on the target domain. However, if too many model layers are frozen and the model is updated with too few parameters, it will not be able to fit the target domain dataset, which can cause a performance deficit. Therefore, deciding the number of frozen model layers was a key issue in this paper. Table 3 shows the performance results of the model on the AOD dataset before and after transfer learning and when freezing different numbers of network layers, where the number of layers was only calculated for the network layers containing learnable parameters.
Table 3.
Model freezing performance comparison.
It can be seen that overfitting occurred when the number of frozen model layers was 20, with APs, APm, and APl values of 0.152, 0.421, and 0.580, respectively. The best results were obtained when the number of frozen layers was 50, with APs, APm, and APl values of 0.167, 0.442, and 0.620, respectively. At this point, the model learned the feature information of the source domain dataset and adapted well to the target domain dataset. When the number of frozen layers was 80, the parameters available to update the model were too small to adapt to the target domain dataset and the performance was the lowest, with APs, APm, and APl values of 0.101, 0.342, and 0.420, respectively.
4.3.3. Ablation Experiments
To demonstrate the effectiveness of the method, this section compares the performance of the model using different combinations of strategies. The tested algorithms are classified as Deformable DETR, IDETR, Deformable DETR + T, and IDETR + T.
As shown in Table 4, the APs value of the Deformable DETR model was 0.101 and the APs value of the IDETR model was 0.133. The latter was 0.032 higher than the former, which shows that the introduction of CBAM improved the performance of the model. After the introduction of transfer learning, the performance of the Deformable DETR model improved to 0.141 and that of the IDETR model improved to 0.167, which shows that the transfer learning method used in this paper improved the performance of the model to a great extent.
Table 4.
Results of ablation experiments.
4.3.4. Analysis and Discussion
The advanced algorithm was applied to the AOD dataset for the detection of bird droppings (nute) and leaves on PV modules. The detection results shown in the figures consist of three parts: the box, classification label, and confidence level.
The performance comparison figures of the target detection algorithm contain three categories representing small, medium, and large targets, as shown in Figure 11, where (a) and (b) are the comparison figures of small target detection before and after the application of the advanced algorithm, (c) and (d) are the comparison figures of medium target detection before and after the application of the advanced algorithm, and (e) and (f) are the comparison figures of large target detection before and after the application of the advanced algorithm. Based on the above experimental results, it can be seen that the unimproved model was unable to identify some of the small targets on the surface of the PV module and there were missed detections, which are marked with orange circles in the figures. The advanced model addressed this problem well by eliminating the phenomenon of missed detections and significantly improving the detection success rate for small targets while adequately improving the detection success rate for all sizes of targets. Additionally, the model accurately identified the classes of targets.
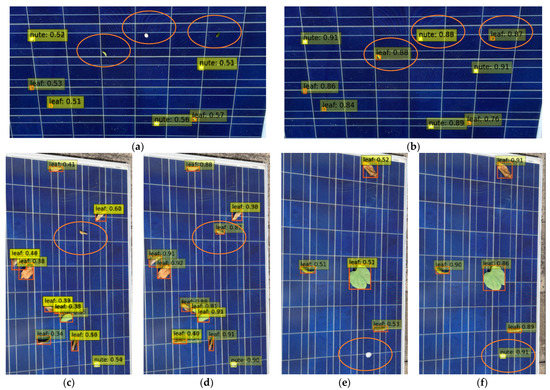
Figure 11.
Target detection performance comparison. (a) Small target detection results before model enhancement; (b) Small target detection results after model enhancement; (c) Middle target detection results before model enhancement; (d) Middle target detection results after model enhancement; (e) Large target detection results before model enhancement; (f) Large target detection results after model enhancement.
5. Conclusions
In this paper, we investigate the widespread problem of foreign object shading detection in PV modules during actual operation, which can cause power loss and faults. We propose a deep learning target detection model for the real-time monitoring and detection of foreign object shading such as leaves and bird droppings. In this paper, the Deformable DETR detection network framework is improved and is named IDETR. IDETR compensates for the deficiency of the Transformer in local modeling capability. The introduction of a convolutional attention module achieves better results by complementing global attention with local attention. Experimentally, IDETR achieves better performance on the self-built AOD dataset, with improved AP values of 0.032, 0.049, and 0.101 in the detection of small, medium, and large targets, respectively. In order to improve the stability of the model, this paper also introduces a transfer learning approach by first pre-training the model using a large-scale public dataset, then freezing the shallow network part of the model, and training the pre-trained model twice on the small dataset constructed specifically for this paper. The experiments demonstrate that the performance of the model is significantly improved when using the transfer learning strategy, improving the AP values by 0.066, 0.192, and 0.234 in the detection of small, medium, and large targets, respectively. The simulation results show that the proposed method can efficiently and rapidly achieve the accurate identification and detection of different types and sizes of foreign object shading on PV modules, thus laying a technical foundation for the safe and stable operation of PV modules and the development of cleaning strategies.
From the target detection results, it can be seen that the improved model can accurately identify, locate, and classify partial shading such as leaves and bird droppings that exist on the surface of PV modules during actual operation. In particular, the detection accuracy of small-sized targets is significantly improved. In addition to the above two targets, in some areas, PV modules are also obscured by snow. Leaves and bird droppings are examples of small-sized local shading with complex morphological characteristics, whereas snow is a type of large-sized shading with single color lines, making it easier to detect. By increasing and training the dataset of snow shading on PV modules, the improved algorithm in this paper can achieve excellent performance for snow shading detection.
The model proposed in this paper can identify abnormal operating conditions of PV modules before faults occur using only visible light images. Therefore, rather than evaluating PV module conditions manually, operators can use unmanned aerial vehicles with high-definition cameras to collect multiple PV module images and use the proposed model for wide-scale detection. This approach saves human resources and avoids the problems associated with manual evaluation, such as visual fatigue and subjective factors, which may affect the accuracy of detection results.
The advanced model proposed in this paper has a relatively complex structure and may have the limitations of low FPS and high latency when ported to embedded platforms. Therefore, in future work, optimizations can be proposed to improve the actual performance of the model in the case of porting it to an embedded platform.
Author Contributions
Conceptualization, Q.K. and H.Z.; methodology, Q.K. and H.Z.; software, Q.K.; validation, Q.K., B.L. and D.Z.; formal analysis, Q.K.; writing—original draft preparation, Q.K.; writing—review and editing, Q.K., H.H.G. and T.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Innovation Project of Guangxi Graduate Education (YCBZ2022027).
Data Availability Statement
The COCO dataset presented in this study is openly available from Common Objects in Context at https://cocodataset.org/, accessed on 20 April 2022, reference number detection-2017.
Acknowledgments
The author is grateful to the editors and anonymous referees for their comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ryś, A.; Samek, L. Yearly Variations of Equivalent Black Carbon Concentrations Observed in Krakow, Poland. Atmosphere 2022, 13, 539. [Google Scholar] [CrossRef]
- Obolkin, V.; Potemkin, V.; Khuriganova, O.; Khodzher, T. Ozone Monitoring in the Baikal Region (East Siberia): Spatiotemporal Variability under the Influence of Air Pollutants and Site Conditions. Atmosphere 2022, 13, 519. [Google Scholar] [CrossRef]
- Xu, J.; Niehoff, N.M.; White, A.J.; Werder, E.J.; Sandler, D.P. Fossil-fuel and combustion-related air pollution and hypertension in the Sister Study. Environ. Pollut. 2022, 315, 120401. [Google Scholar] [CrossRef]
- Thurston, G.D. Fossil fuel combustion and PM2.5 mass air pollution associations with mortality. Environ. Int. 2022, 160, 107066. [Google Scholar] [CrossRef]
- Simionescu, M. The renewable and nuclear energy-economic growth nexus in the context of quality of governance. Prog. Nucl. Energy 2023, 157, 104590. [Google Scholar] [CrossRef]
- Siddik, A.B.; Khan, S.; Khan, U.; Yong, L.; Murshed, M. The role of renewable energy finance in achieving low-carbon growth: Contextual evidence from leading renewable energy-investing countries. Energy 2023, 270, 126864. [Google Scholar] [CrossRef]
- Noyan, O.F.; Hasan, M.M.; Pala, N. A Global Review of the Hydrogen Energy Eco-System. Energies 2023, 16, 1484. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, D.; Goh, H.H.; Wang, S.; Ahmad, T.; Mao, D.; Liu, T.; Zhao, H.; Wu, T. Future data center energy-conservation and emission-reduction technologies in the context of smart and low-carbon city construction. Sustain. Cities Soc. 2023, 89, 104322. [Google Scholar] [CrossRef]
- Zhu, H.; Goh, H.H.; Zhang, D.; Ahmad, T.; Liu, H.; Wang, S.; Li, S.; Liu, T.; Dai, H.; Wu, T. Key technologies for smart energy systems: Recent developments, challenges, and research opportunities in the context of carbon neutrality. J. Clean. Prod. 2022, 331, 129809. [Google Scholar] [CrossRef]
- Zhang, D.; Zhu, H.; Zhang, H.; Goh, H.H.; Liu, H.; Wu, T. Multi-Objective Optimization for Smart Integrated Energy System Considering Demand Responses and Dynamic Prices. IEEE Trans. Smart Grid 2022, 13, 1100–1112. [Google Scholar] [CrossRef]
- Xie, H.; Jiang, M.; Zhang, D.; Goh, H.; Ahmad, T.; Liu, H.; Liu, T.; Wang, S.; Wu, T. IntelliSense technology in the new power systems. Renew. Sustain. Energy Rev. 2023, 177, 113229. [Google Scholar] [CrossRef]
- Rahman, M.M.; Hasanuzzaman, M.; Rahim, N.A. Effects of various parameters on PV-module power and efficiency. Energy Convers. Manag. 2015, 103, 348–358. [Google Scholar] [CrossRef]
- Abdulmunem, A.R.; Samin, P.M.; Rahman, H.A.; Hussien, H.A.; Mazali, I.I. Enhancing PV Cell’s electrical efficiency using phase change material with copper foam matrix and multi-walled carbon nanotubes as passive cooling method. Renew. Energy 2020, 160, 663–675. [Google Scholar] [CrossRef]
- Olabi, A.G.; Abdelkareem, M.A.; Semeraro, C.; Radi, M.A.; Rezk, H.; Muhaisen, O.; Al-Isawi, O.A.; Sayed, E.T. Artificial neural networks applications in partially shaded PV systems. Therm. Sci. Eng. Prog. 2023, 37, 101612. [Google Scholar] [CrossRef]
- Sharma, D.; Jalil, M.F.; Ansari, M.S.; Bansal, R.C. A review of PV array reconfiguration techniques for maximum power extraction under partial shading conditions. Optik 2023, 275, 170559. [Google Scholar] [CrossRef]
- Piccoli, E.; Dama, A.; Dolara, A.; Leva, S. Experimental validation of a model for PV systems under partial shading for building integrated applications. Sol. Energy 2019, 183, 356–370. [Google Scholar] [CrossRef]
- Huang, P.; Hu, G.; Zhao, X.; Lu, L.; Ding, H.; Li, J. Effect of organics on the adhesion of dust to PV panel surfaces under condensation. Energy 2022, 261, 125255. [Google Scholar] [CrossRef]
- Lopez-Garcia, J.; Pozza, A.; Sample, T. Long-term soiling of silicon PV modules in a moderate subtropical climate. Sol. Energy 2016, 130, 174–183. [Google Scholar] [CrossRef]
- Mussard, M.; Amara, M. Performance of solar photovoltaic modules under arid climatic conditions: A review. Sol. Energy 2018, 174, 409–421. [Google Scholar] [CrossRef]
- Costa, S.C.S.; Diniz, A.S.A.C.; Kazmerski, L.L. Solar energy dust and soiling R&D progress: Literature review update for 2016. Renew. Sustain. Energy Rev. 2018, 82, 2504–2536. [Google Scholar] [CrossRef]
- Ilse, K.K.; Figgis, B.W.; Naumann, V.; Hagendorf, C.; Bagdahn, J. Fundamentals of soiling processes on photovoltaic modules. Renew. Sustain. Energy Rev. 2018, 98, 239–254. [Google Scholar] [CrossRef]
- Kazem, H.A.; Chaichan, M.T. The effect of dust accumulation and cleaning methods on PV panels’ outcomes based on an experimental study of six locations in Northern Oman. Sol. Energy 2019, 187, 30–38. [Google Scholar] [CrossRef]
- Mahammed, I.H.; Arab, A.H.; Berrah, S.; Bakelli, Y.; Khennene, M.; Oudjana, S.H.; Fezzani, A.; Zaghba, L. Outdoor study of partial shading effects on different PV modules technologies. Energy Procedia 2017, 141, 81–85. [Google Scholar] [CrossRef]
- Livera, A.; Paphitis, G.; Pikolos, L.; Papadopoulos, I.; Montes-Romero, J.; Lopez-Lorente, J.; Makrides, G.; Sutterlueti, J.; Georghiou, G.E. Intelligent Cloud-Based Monitoring and Control Digital Twin for Photovoltaic Power Plants. In Proceedings of the 2022 IEEE 49th Photovoltaics Specialists Conference (PVSC), Philadelphia, PA, USA, 5–10 June 2022; pp. 0267–0274. [Google Scholar]
- Bayrak, G.; Cebeci, M. Monitoring a grid connected PV power generation system with labview. In Proceedings of the 2013 International Conference on Renewable Energy Research and Applications (ICRERA), Madrid, Spain, 20–23 October 2013; pp. 562–567. [Google Scholar]
- Mellit, A.; Kalogirou, S. 6—Machine learning and deep learning algorithms for fault diagnosis of photovoltaic systems. In Handbook of Artificial Intelligence Techniques in Photovoltaic Systems; Elsevier: Amsterdam, The Netherlands, 2022; pp. 183–226. [Google Scholar]
- Et-taleby, A.; Chaibi, Y.; Allouhi, A.; Boussetta, M.; Benslimane, M. A combined convolutional neural network model and support vector machine technique for fault detection and classification based on electroluminescence images of photovoltaic modules. Sustain. Energy Grids Netw. 2022, 32, 100946. [Google Scholar] [CrossRef]
- Sun, T.; Xing, H.; Cao, S.; Zhang, Y.; Fan, S.; Liu, P. A novel detection method for hot spots of photovoltaic (PV) panels using improved anchors and prediction heads of YOLOv5 network. Energy Rep. 2022, 8, 1219–1229. [Google Scholar] [CrossRef]
- Shihavuddin, A.S.M.; Rashid, M.R.A.; Maruf, M.H.; Hasan, M.A.; Haq, M.A.u.; Ashique, R.H.; Mansur, A.A. Image based surface damage detection of renewable energy installations using a unified deep learning approach. Energy Rep. 2021, 7, 4566–4576. [Google Scholar] [CrossRef]
- Cavieres, R.; Barraza, R.; Estay, D.; Bilbao, J.; Valdivia-Lefort, P. Automatic soiling and partial shading assessment on PV modules through RGB images analysis. Appl. Energy 2022, 306, 117964. [Google Scholar] [CrossRef]
- Shi, J.; Zhou, Y.; Zhang, W.X.Q. Target Detection Based on Improved Mask Rcnn in Service Robot. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8519–8524. [Google Scholar]
- Lu, Y.; Zhang, L.; Xie, W. YOLO-compact: An Efficient YOLO Network for Single Category Real-time Object Detection. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 1931–1936. [Google Scholar]
- Yu, F.; Huang, J.; Luo, Z.; Zhang, L.; Lu, W. An effective method for figures and tables detection in academic literature. Inf. Process. Manag. 2023, 60, 103286. [Google Scholar] [CrossRef]
- Zhang, X.; Su, W.; Li, J.; Li, J.; Lou, X. Spatial Non-Maximum Suppression for Object Detection using Correlation and Dynamic Thresholds. In Proceedings of the 2021 18th International SoC Design Conference (ISOCC), 6–9 October 2021; pp. 264–265. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-End Object Detection with Transformers. arXiv 2020, arXiv:abs/2005.12872. [Google Scholar]
- Zhu, X.; Su, W.; Lu, L.; Li, B.; Wang, X.; Dai, J. Deformable DETR: Deformable Transformers for End-to-End Object Detection. arXiv 2020, arXiv:abs/2010.04159. [Google Scholar]
- Ding, J.-W.; Ye, C.; Wang, H.; Huyan, J.; Yang, M.; Li, W. Foreign Bodies Detector Based on DETR for High-Resolution X-ray Images of Textiles. IEEE Trans. Instrum. Meas. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Dai, J.; Zhao, X.; Li, L.; Ma, X. GCD-YOLOv5: An Armored Target Recognition Algorithm in Complex Environments Based on Array Lidar. IEEE Photonics J. 2022, 14, 1–11. [Google Scholar] [CrossRef]
- Zhao, Z.-Q.; Zheng, P.; Xu, S.-t.; Wu, X. Object Detection With Deep Learning: A Review. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Deng, W. Deep Visual Domain Adaptation: A Survey. Neurocomputing 2018, 312, 135–153. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.J.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.-S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 1–19. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).