
Robust Subsynchronous Damping Control of PMSG-Based Wind Farm †
Abstract
:1. Introduction
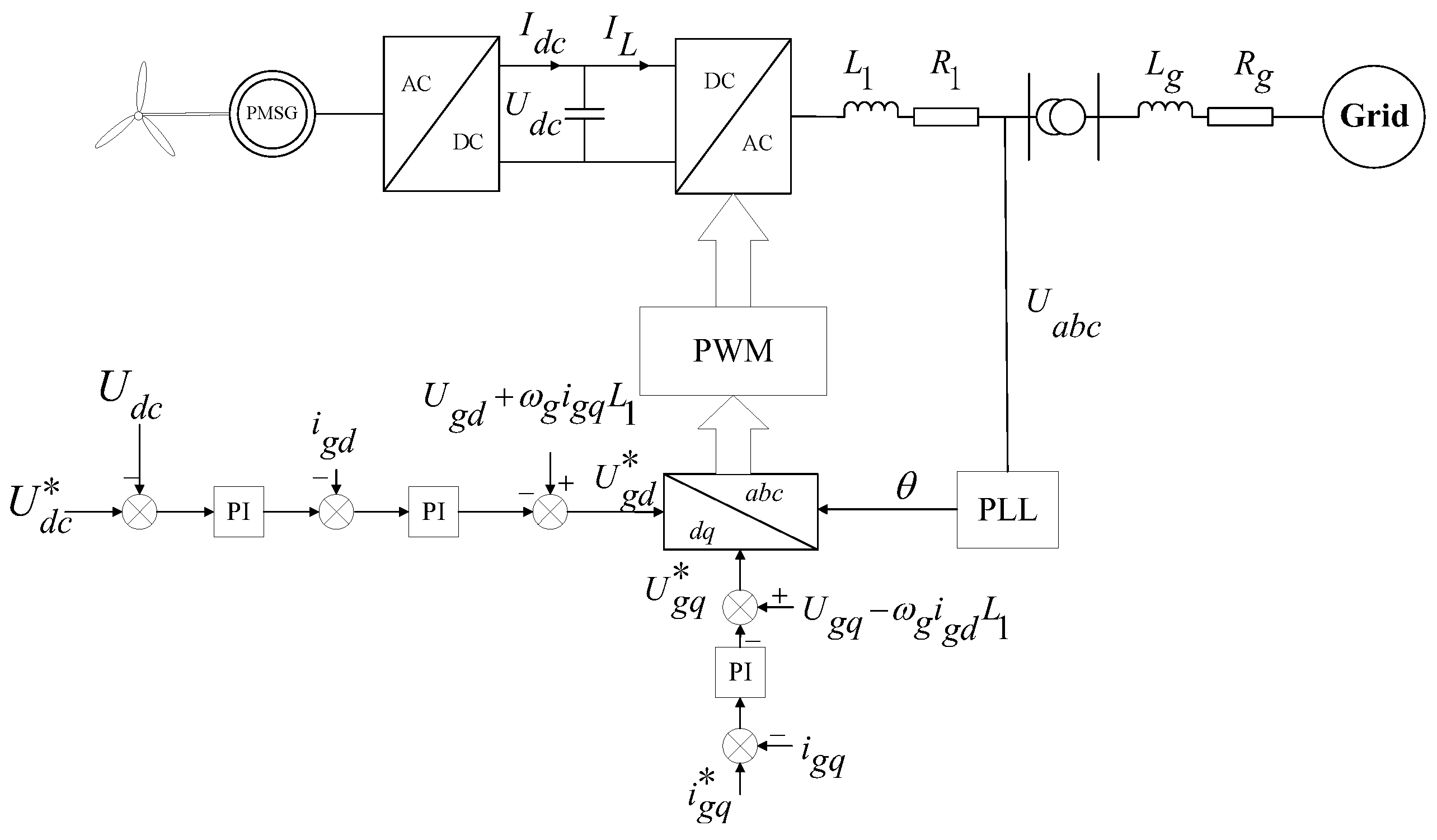
2. Modeling of Wind Power Systems
3. Analysis of Subsynchronous Resonance in a PMSG-Based Wind Farm
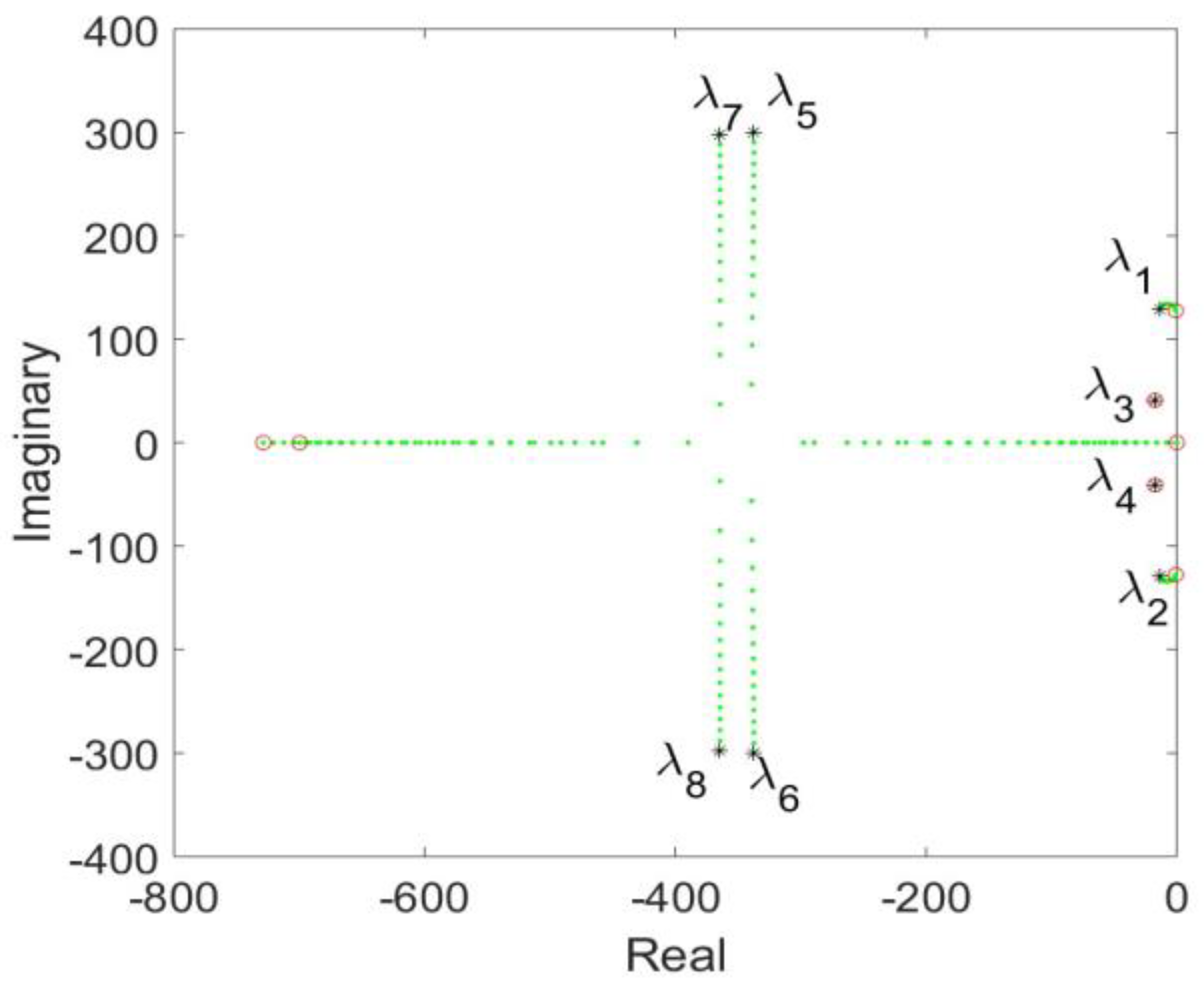
3.1. The Relationship between Current Inner Loop Control Parameters and SSR Characteristics
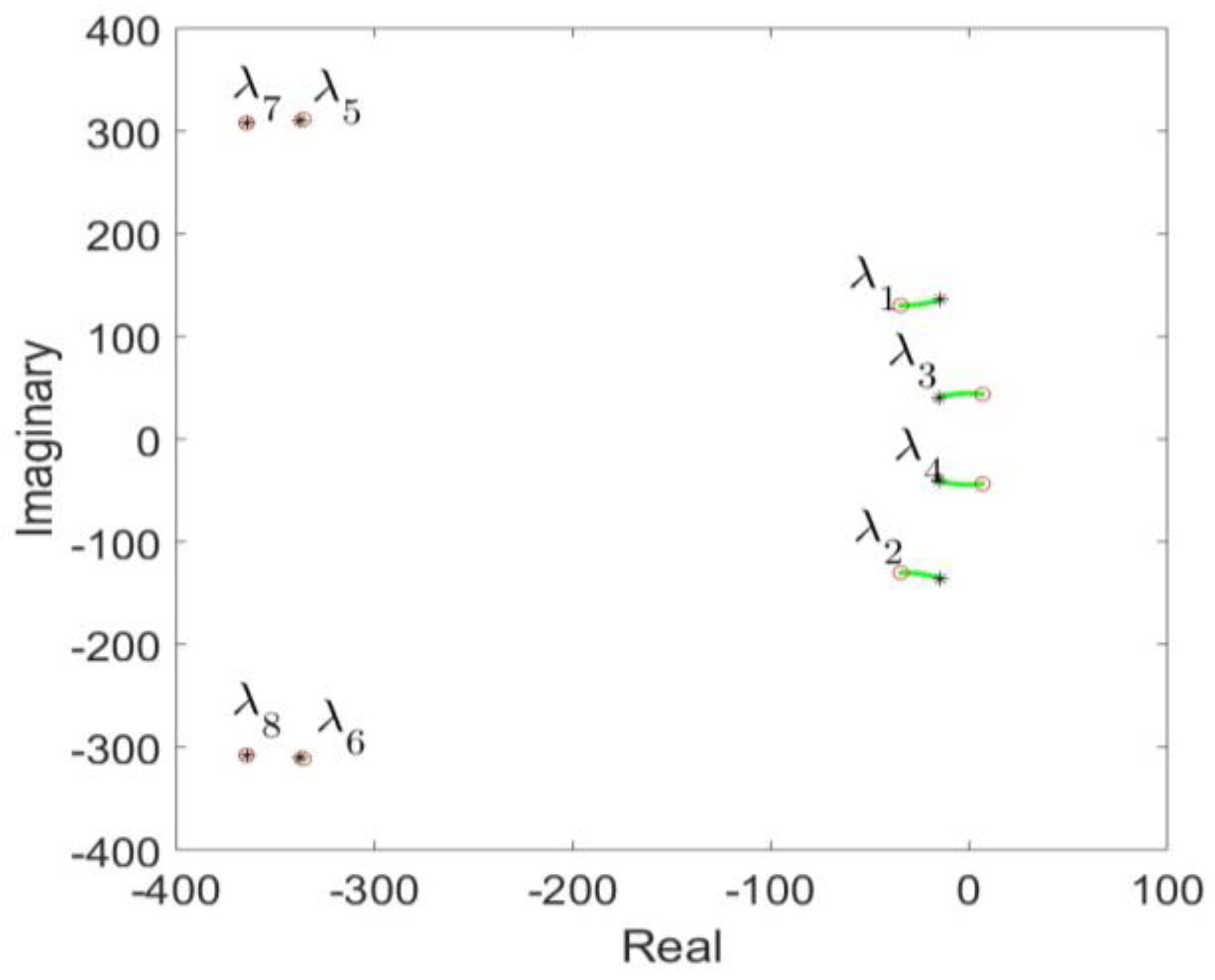
3.2. The Relationship between Voltage Outer Loop Control Parameters and SSR Characteristics
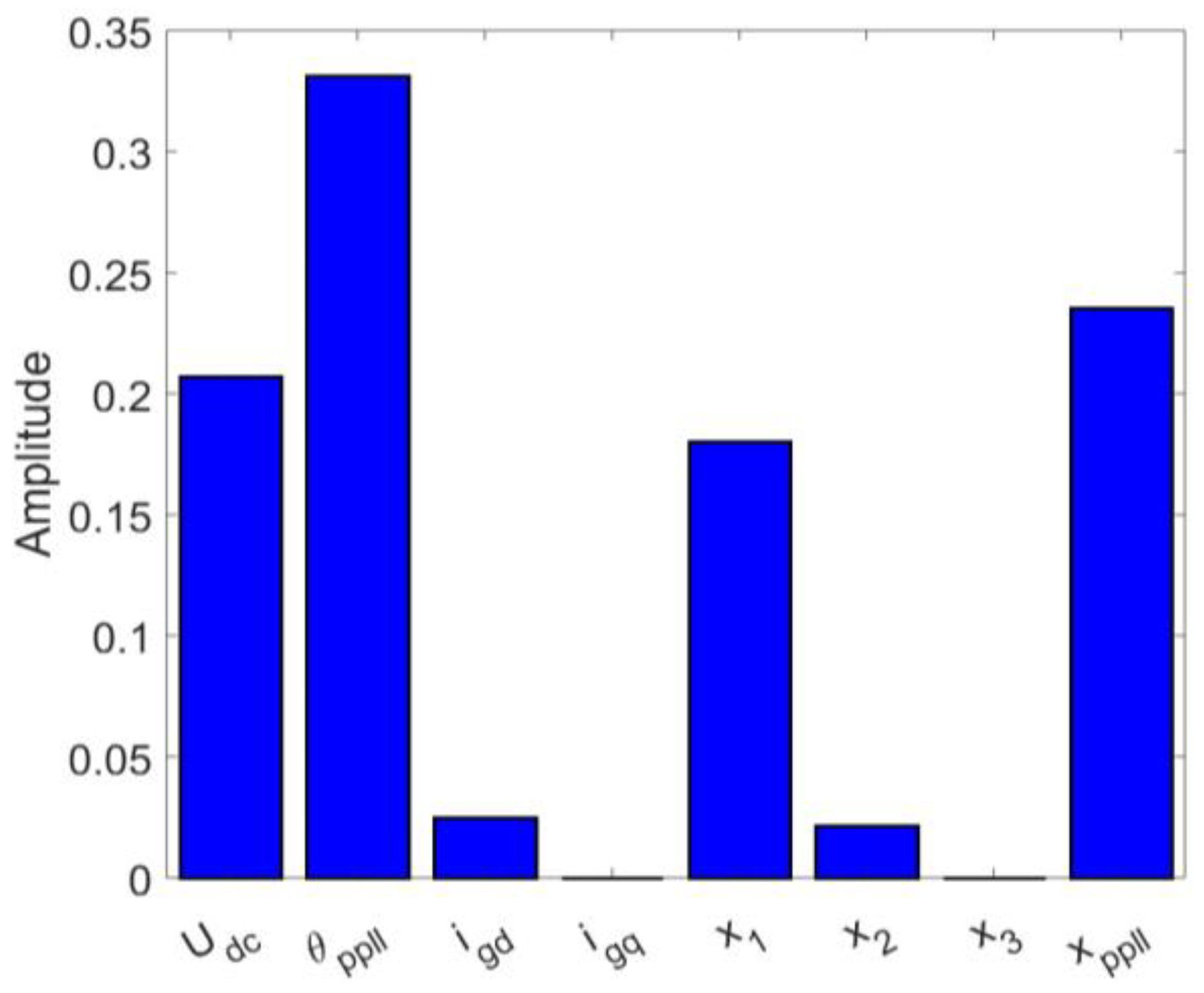
3.3. The Relationship between PLL Control Parameters and SSR Characteristics
3.4. The Relationship between SCR and SSR Characteristics
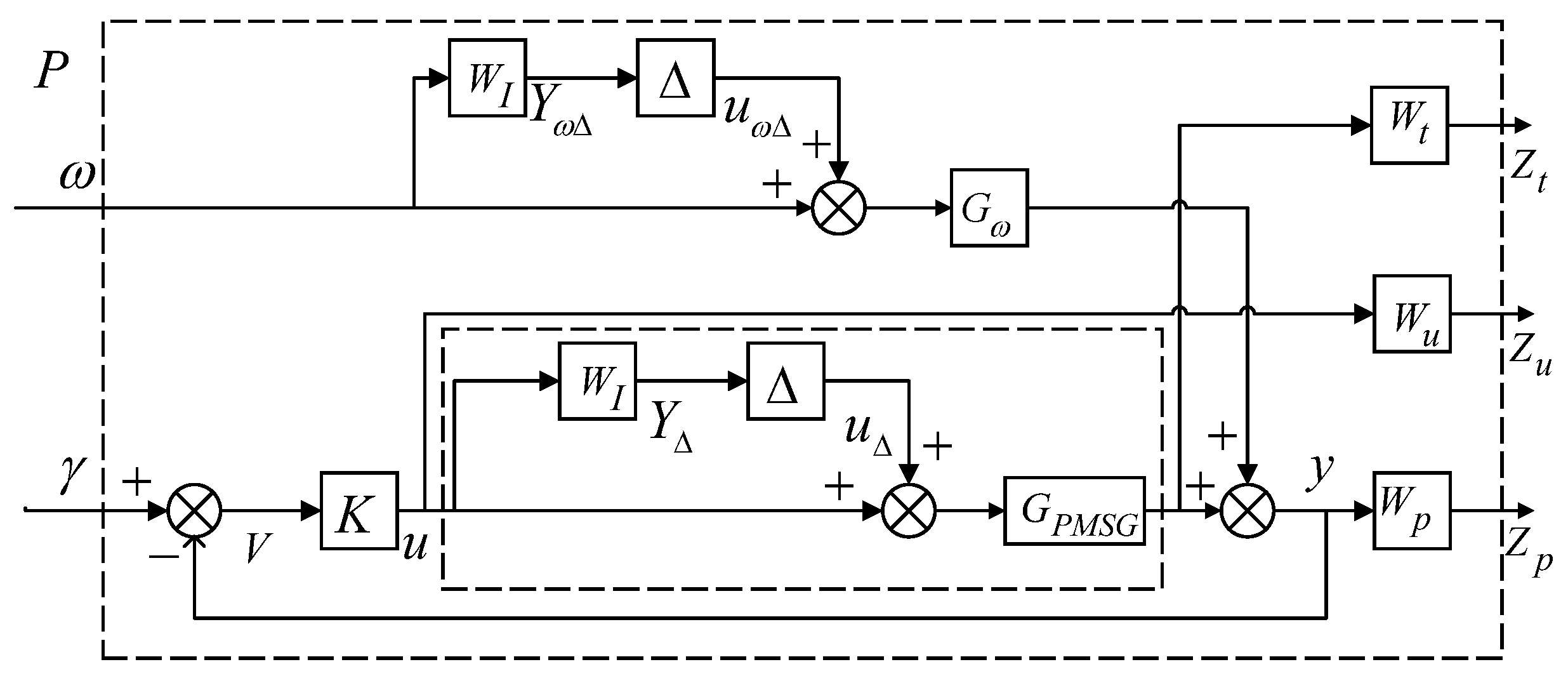
4. Designing of a Robust SSR Damping Controller
4.1. Finding Uncertainty Boundary
4.2. Designing Weight Function
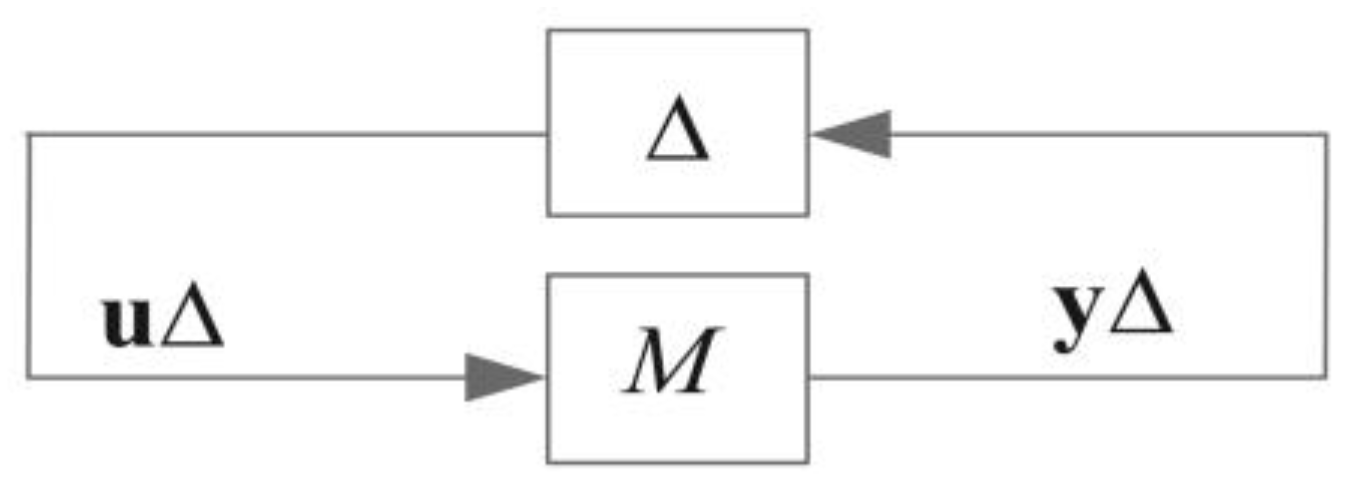
4.3. Designing an SSR Damping Controller
4.4. Performance Evaluation
5. Simulation
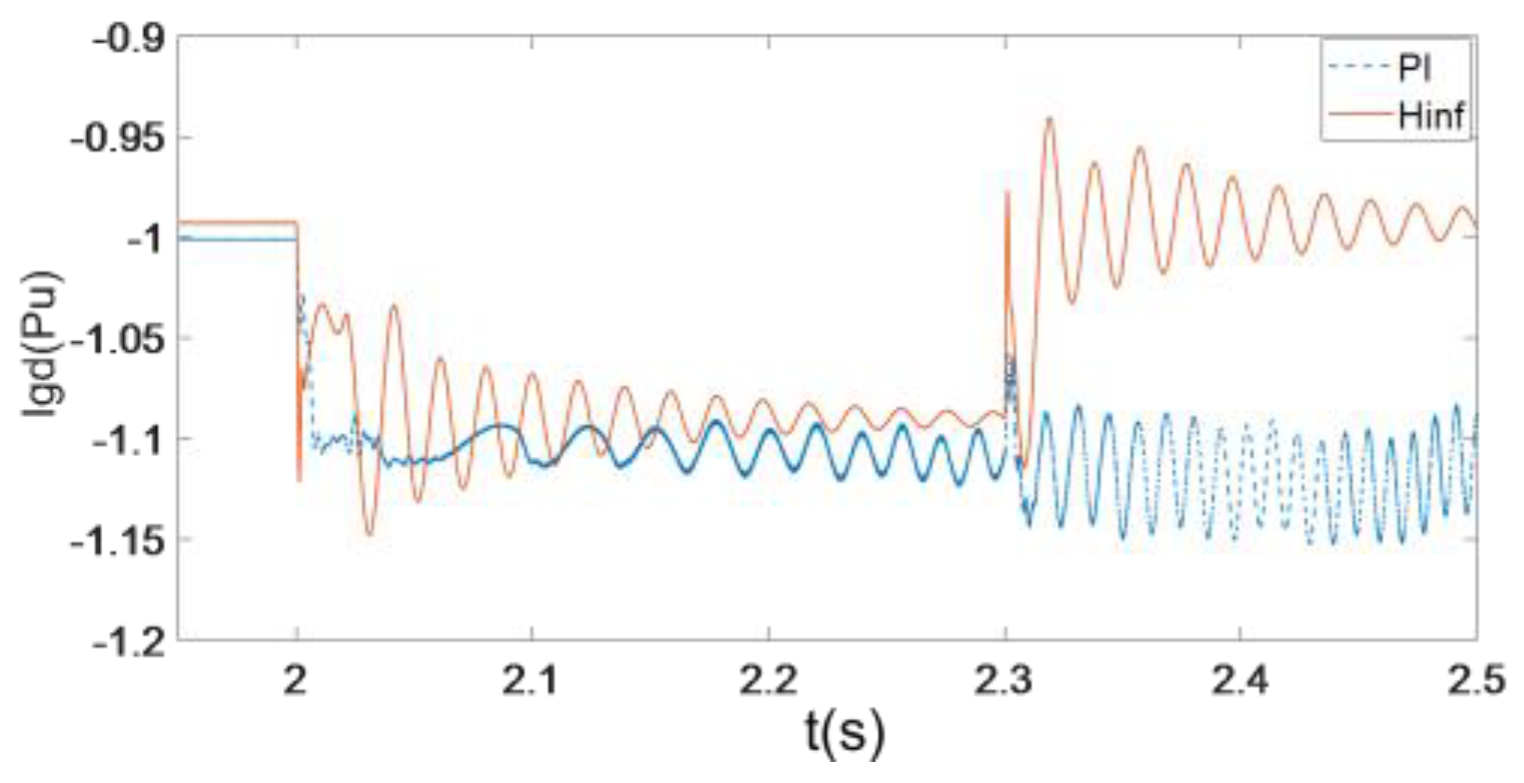
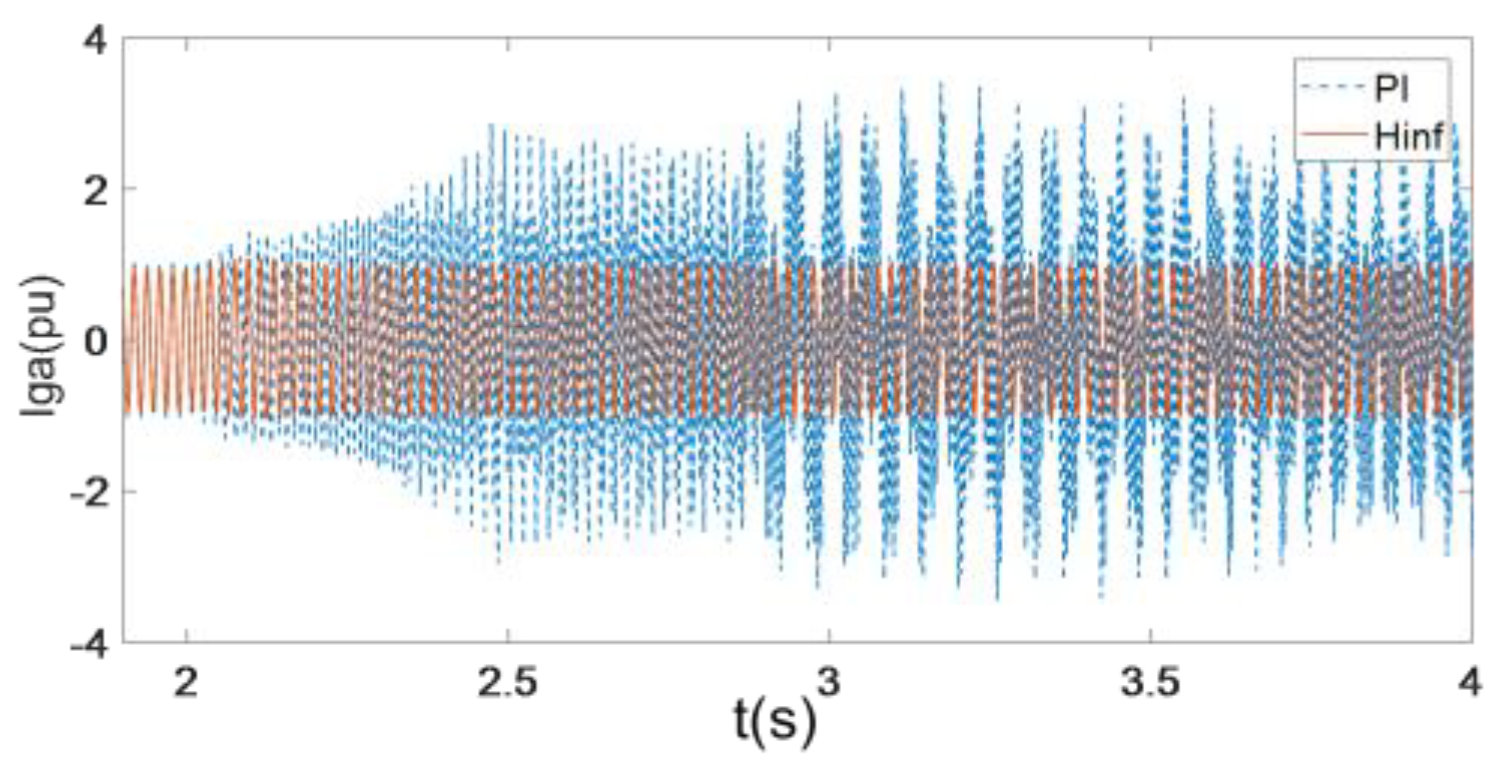
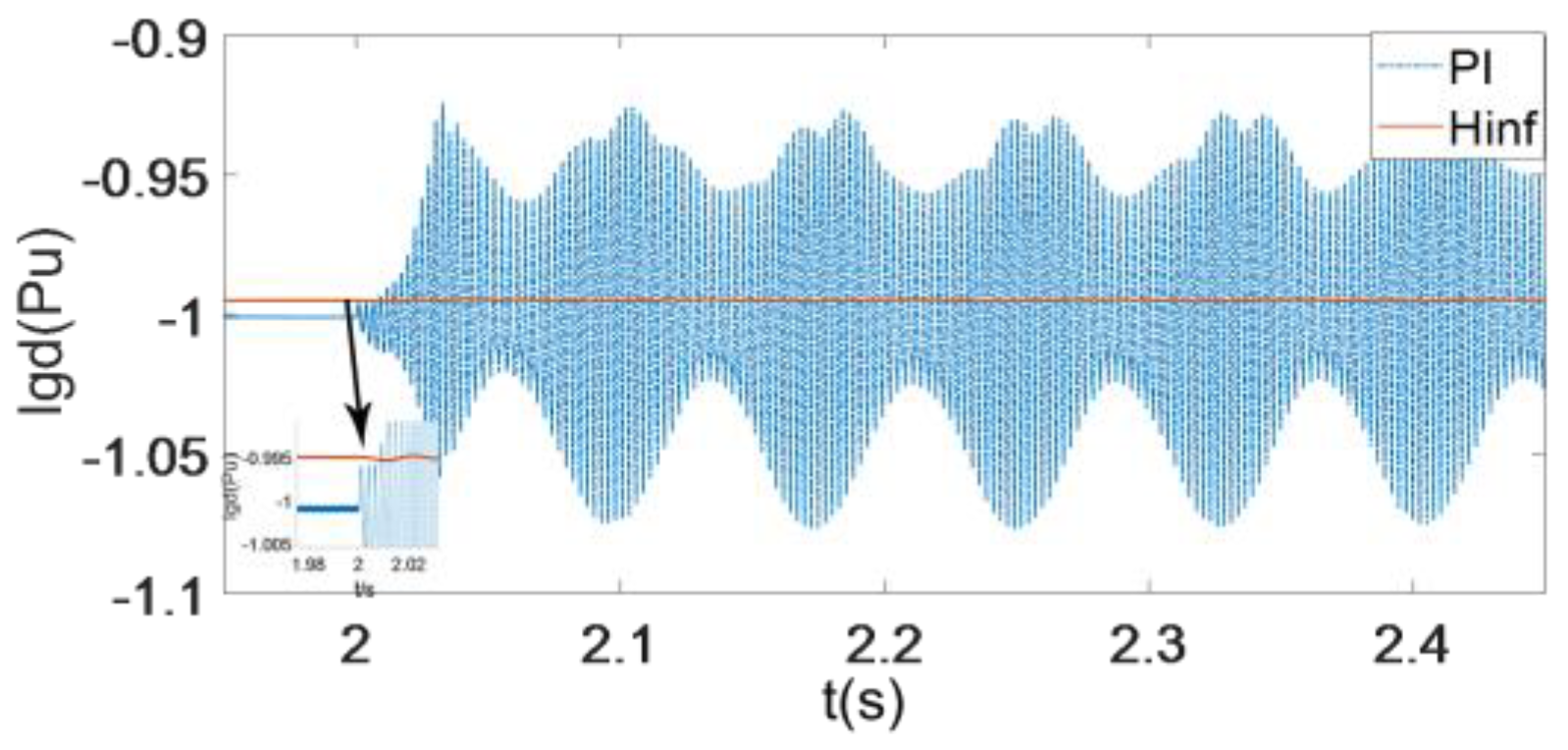
5.1. Stability Comparison with Grid Voltage Disturbance
5.2. The Influence of Different Impedance of Transmission Line on SSR
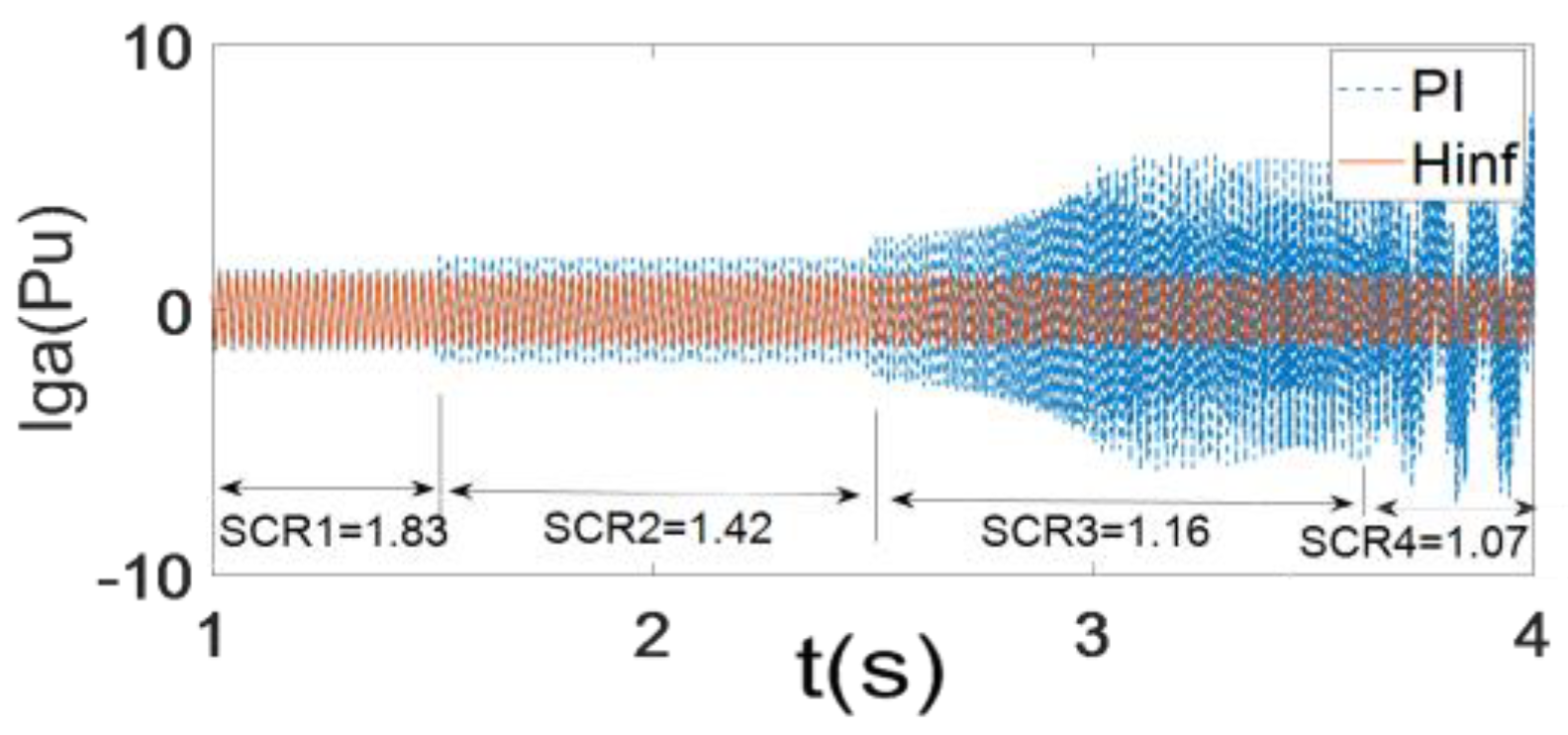
5.3. The Influence of Different SCR on SSR
5.4. The Influence of Different Voltage Outer Loop Parameters on SSR
5.5. The Influence of Different PLL Control Parameters on SSR
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Filter resistance and inductance of GSC | |
| Transmission line resistance, transmission line inductance | |
| DC link capacitance, voltage of dc link capacitance | |
| D-axis voltage and q-axis voltage of GSC in rotating d−q reference frame | |
| D-axis voltage and q-axis voltage in the point of common coupling (PCC) voltage | |
| Grid frequency | |
| Transformer reactance | |
| d−q axis components of the grid-side converter’s injected currents | |
| Angle of PCC voltage | |
| Inner loop integral and proportional parameters of GSC controller | |
| Outer loop integral and proportional parameters of GSC controller | |
| Integral and proportional parameters of PLL controller | |
| d−q axis duty cycle of GSC converter | |
| Reference value of variable |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| L1 | 0.05 | R1 | 0.005 |
| Lg | 0.3 | Rg | 0.02 |
| kp1 | 1.1 | ki1 | 50 |
| kp2 | 1.1 | ki2 | 50 |
| kppll | 28 | kipll | 1400 |
| Wind Farm | 10 MW | Grid | 47 MW |
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| 600 | 670 | ||
| 1.2 | 3 | ||
| 0.092 | 150 | ||
| 2 | 20 | ||
| 1500 | 1584 | ||
| 0.001 | 0.01 |
Appendix B
References
- Janhunen, O.-P.; Korhonen, R.; Linnamaa, L.; Kuusela, A.; Rauhala, T. Experiences on studies for subsynchronous oscillation risks of wind power plants connected in the vicinity of finnish series compensated network. In Proceedings of the 20th International Workshop on Large-Scale Integration of Wind Power into Power Systems as Well as on Transmission Networks for Offshore Wind Power Plants (WIW 2021), Hybrid Conference, Berlin, Germany, 29–30 September 2021; pp. 414–422. [Google Scholar] [CrossRef]
- IEEE Subsynchronous Resonance Working Group of the System Dynamic Performance Subcommittee Power System Engineering Committee. Terms, Definitions and symbols for subsynchronous oscillations. IEEE Trans. Power Appar. Syst. 1985, PAS-104, 1326–1334. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; He, J.; Xu, T.; Yu, Z.; Wang, C.; Zhang, C. Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks. IEEE Trans. Power Syst. 2017, 32, 4708–4720. [Google Scholar] [CrossRef]
- Shair, J.; Xie, X.; Yang, J.; Li, J.; Li, H. Adaptive damping control of subsynchronous oscillation in DFIG-based wind farms connected to series-compensated network. IEEE Trans. Power Deliv. 2022, 37, 1036–1049. [Google Scholar] [CrossRef]
- Gu, K.; Wu, F.; Zhang, X.; Ju, P.; Zhou, H.; Luo, J.; Li, J. SSR analysis of DFIG-based wind farm with VSM control strategy. IEEE Access 2019, 7, 118702–118711. [Google Scholar] [CrossRef]
- Beza, M.; Bongiorno, M. On the risk for subsynchronous control interaction in Type 4 based wind farms. IEEE Trans. Sustain. Energy 2019, 10, 1410–1418. [Google Scholar] [CrossRef]
- Ren, B.; Li, Q.; Zhou, Q.; Wang, C.; Sun, R.; Jia, Y.; Li, H. Analysis and comparison of multi-parameter factors affecting the stability of subsynchronous oscillation of grid-connected PMSG. Energy Rep. 2022, 8, 51–58. [Google Scholar] [CrossRef]
- Feng, S.; Wang, K.; Lei, J. Influences of DC bus voltage dynamics in modulation algorithm on power oscillations in PMSG-based wind farms. Int. J. Electr. Power Energy Syst. 2021, 124, 106387. [Google Scholar] [CrossRef]
- Yuan, L.; Meng, K.; Huang, J. Investigating subsynchronous oscillations caused by interactions between PMSG-based wind farms and weak AC systems. Int. J. Electr. Power Energy Syst. 2020, 115, 105477. [Google Scholar] [CrossRef]
- Shao, B.; Xiao, Q.; Meng, X.; Han, P.; Ma, W.; Miao, Z.; Blaabjerg, F.; Chen, Z. Medium-frequency and sub-synchronous oscillation analysis of direct-drive wind farms connected to the parallel-compensated AC grid. Electr. Power Syst. Res. 2023, 216, 109061. [Google Scholar] [CrossRef]
- Jiang, H.; Ma, S.; Song, R. Subsynchronous control interaction analysis between PMSG-based offshore wind farm and SVGs. Energy Rep. 2023, 9, 938–945. [Google Scholar] [CrossRef]
- Li, P.; Xiong, L.; Ma, M. Energy-shaping L2-gain controller for PMSG wind turbine to mitigate subsynchronous interaction. Int. J. Electr. Power Energy Syst. 2022, 135, 107571. [Google Scholar] [CrossRef]
- Ma, J.; Song, Z.; Zhang, Y.; Shen, Y.; Thorp, J.S. Model order reduction analysis of DFIG integration on the power system small-signal stability considering the virtual inertia control. IET Gener. Trans. Distrib. 2017, 11, 4087–4095. [Google Scholar] [CrossRef]
- Ali, H.R.; Kunjumuhammed, L.P.; Pal, B.C.; Adamczyk, A.G.; Vershinin, K. Model order reduction of wind farms: Linear approach. IEEE Trans. Sustain. Energy 2019, 10, 1194–1205. [Google Scholar] [CrossRef] [Green Version]
- Ali, H.R.; Kunjumuhammed, L.P.; Pal, B.C.; Adamczyk, A.G.; Vershinin, K. A trajectory piecewise-linear approach to nonlinear model order reduction of wind farms. IEEE Trans. Sustain. Energy 2020, 11, 894–905. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, X.; Liu, H.; Liu, H.; Li, Y.; Zhang, C. Characteristic analysis of subsynchronous resonance in practical wind farms connected to series-compensated transmissions. IEEE Trans. Energy Convers. 2017, 32, 1117–1126. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X. Comparative studies on the impedance models of VSC-based renewable generators for SSI stability analysis. IEEE Trans. Energy Convers. 2019, 34, 1442–1453. [Google Scholar] [CrossRef]
- Liu, W.; Xie, X.; Shair, J.; He, J. Frequency-coupled impedance model based subsynchronous oscillation analysis for direct-drive wind turbines connected to a weak AC power system. J. Eng. 2019, 18, 4841–4846. [Google Scholar] [CrossRef]
- Liu, W.; Xie, X.; Shair, J.; Liu, H.; He, J. Frequency-coupled impedance model-based sub-synchronous interaction analysis for direct-drive wind turbines connected to a weak AC grid. IET Renew. Power Gener. 2019, 13, 2966–2976. [Google Scholar] [CrossRef]
- Luo, C.; Guo, Q.; Xiao, X.; Gole, A.M.; Liao, M. Study on subsynchronous resonance damping control for series-compensated DFIG-based wind farm. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 419–424. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, D.; Zhao, L.; Li, Z.; Hu, H.; Tang, Z. Research on the subsynchronous oscillation characteristics of different wind farms connected to the grid via VSC-HVDC. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 366–375. [Google Scholar] [CrossRef]
- Alawasa, K.M.; Mohamed, A.R.I.; Xu, W. Modeling, analysis, and suppression of the impact of full-scale wind power converters on subsynchronous damping. IEEE Syst. J. 2013, 7, 700–712. [Google Scholar] [CrossRef]
- Shair, J.; Xie, X.; Li, H. A grid-side multi-modal adaptive damping control of super-/sub-synchronous oscillations in type-4 wind farms connected to weak AC grid. Electr. Power Syst. Res. 2023, 215, 108963. [Google Scholar] [CrossRef]
- Du, W.; Wang, X.; Wang, H. Subsynchronous interactions caused by the PLL in the grid-connected PMSG for the wind power generation. Int. J. Electr. Power Energy Syst. 2019, 98, 331–341. [Google Scholar] [CrossRef]
- Bi, T.; Li, J.; Zhang, P.; Mitchell-Colgan, E.; Xiao, S. Study on response characteristics of grid-side converter controller of PMSG to subsynchronous frequency component. IET Renew. Power Gener. 2017, 11, 966–972. [Google Scholar] [CrossRef]
- Cao, Y.; Xu, Y. Research on mechanism of sub/super-synchronous oscillation caused by GSC controller of direct-drive permanent magnetic synchronous generator. Power Syst. Technol. 2018, 42, 174–185. [Google Scholar]
- Shao, B.; Zhao, S.; Gao, B. An equivalent model for sub-synchronous oscillation analysis in direct-drive wind farms with VSC-HVDC systems. Int. J. Electr. Power Energy Syst. 2021, 125, 106498. [Google Scholar] [CrossRef]
- Zames, G. Feedback and optimal sensitivity: Model reference transformations, multiplicative semi-norms, and approximate inverses. IEEE Trans. Autom. Control 1981, 26, 301–320. [Google Scholar] [CrossRef]
- Francis, B.A.; Zames, G. On optimal min-max servos. In Proceedings of the 1981 20th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, San Diego, CA, USA, 16–18 December 1981; pp. 188–189. [Google Scholar] [CrossRef]
- Zames, G.; Francis, B.A. A new approach to classical frequency methods: Feedback and minimax sensitivity. In Proceedings of the 1981 20th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, San Diego, CA, USA, 16–18 December 1981; pp. 867–874. [Google Scholar] [CrossRef]
- Davari, M.; Mohamed, Y.A.I. Robust DC-link voltage control of a full-scale PMSG wind turbine for effective integration in DC grids. IEEE Trans. Power Electron. 2016, 32, 4021–4035. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Q.; Gong, W.; Gryning, M.P.S. H∞ robust current control for DFIG-based wind turbine subject to grid voltage distortions. IEEE Trans. Sustain. Energy 2017, 8, 816–825. [Google Scholar] [CrossRef] [Green Version]
- Surinkaew, T.; Ngamroo, I. Robust power oscillation damper design for DFIG-based wind turbine based on specified structure mixed H 2/H∞ control. Renew. Energy 2014, 66, 15–24. [Google Scholar] [CrossRef]






























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Luo, F.; Long, C.; Tao, G.; Xu, Y.; Yang, R. Robust Subsynchronous Damping Control of PMSG-Based Wind Farm. Energies 2023, 16, 3144. https://doi.org/10.3390/en16073144
Wang Y, Luo F, Long C, Tao G, Xu Y, Yang R. Robust Subsynchronous Damping Control of PMSG-Based Wind Farm. Energies. 2023; 16(7):3144. https://doi.org/10.3390/en16073144
Chicago/Turabian StyleWang, Yun, Fengyun Luo, Chaoyang Long, Guoqing Tao, Ying Xu, and Rong Yang. 2023. "Robust Subsynchronous Damping Control of PMSG-Based Wind Farm" Energies 16, no. 7: 3144. https://doi.org/10.3390/en16073144