1. Introduction
Automatic Generation Control (AGC) is an essential requirement of power plants for smooth working in the state of load deviations. The control demonstrates that generation in the power system is automatically regulated, which agrees with the changes in loading requirements. The main theme of the AGC study lies in the system frequency regulations. The speed falls with an increment in load demand, and this result in frequency fluctuations [
1]. The nature of interrelated solar plants with the already existing thermal plant is to include renewable energy sources in the system. Additionally, the existing grids remain connected with more and more renewable energy sources nowadays. Hence, we have considered the inference of solar PV systems in one of the control areas. This is the primary focus of this proposed work. The necessity of autonomous generation control is one of the essential requirements of the interconnected power system, as continuous load variations are faced by the generation facilities. They are equipped with systems (governors with controllers) to respond like the primary and secondary controls. In these conditions, generation is altered, as per the requirements, through governor controls. Additionally, it is required to achieve zero steady-state deviations in frequencies concerning the control areas. The tie power flow should also have zero steady-state errors.
Nowadays, power systems are interrelated. So, disruption in one of the areas creates a disturbance in another area. Additionally, the control areas are interconnected through tie lines. So, the conditions of AGC are to control both the frequency and the tie-line power at scheduled values. Automatic Generation Control has gained more importance and attention from researchers due to its role in interconnected systems. The main challenge is frequency management since it has a direct connection with speed. If the system frequency changes, the speed of a plant changes, and hence, the output of the power plant is affected. So, the challenge is to nullify the frequency deviations as quickly as possible after a change in the system loading conditions. For fast and efficient controls, the gain of the secondary controller must be properly optimized for achieving zero steady-state errors in frequency and tie-line power flow. Researchers have adopted several optimization algorithms for tuning the gains of secondary controllers. Several frequency regulation optimization and control methods have already been established over the decades.
The authors have identified deregulation situations with load frequency control operational problems and their technical solutions regarding standard algorithms required for the deployment of this critical condition in [
2]. Parameterized AGC schemes are explored, including non-linear and linear power model structures, classical and optimal control, along with centralized control. Wind turbines have also been considered for AGC schemes that utilize intelligent control in [
3].
The Differential Evolution (DE) approach based on parallel 2-DOF regulator LFC control is discussed with different conditional parameters such as generation rate constraints and a dead band of the governor with delay time in the system modeling [
4]. The authors presented numerous classical controllers, such as an integral controller for automated generation controls in a hydro-thermal system. Additionally, the sensitivity method is used for estimating the controller tuning with the optimum parameters and good robustness, considering large deviations in the system loading [
5]. To astound the frequency-fluctuations-related problem, a simple PID control procedure, which counterbalances this variability in the system frequency, is utilized in [
6]. Controller parameters have been varying along a wide spectrum of load variations using an imperialist competitive algorithm for obtaining the optimum response of frequency in the same by the authors. Dye-sensitized solar cells Z-series connected modules are tested in a greenhouse environment to combine the devices’ high conversion efficiency, robustness, and transparency, as proposed by the authors [
7]. An artificial-intelligence-based algorithm termed the Hybrid Neuro-Fuzzy (HNF) method has been presented by the researchers. The proposed regulator has the advantage of being able to handle non-linearities. It is also faster compared to conventional controllers [
8]. The setting of control attributes at optimal values of the power systems centered on PSO aimed at the multi-machines system has been suggested in [
9]. This author confirmed that the proposed approach is functioning properly in dampening local and inter-area oscillations with large variations in loading situations and system structures.
Researchers are exploring the merging of renewable energy technologies for electrical power generation and controls. Authors have shown the implementation of an ANFIS strategy that employs artificial neural networks (ANN) for autonomous generation control of the three imbalanced hydrothermal systems [
10]. An independent hybrid generating system operation with solar thermal power, battery energy storage, diesel generators, solar PV, ultra-capacitors, fuel cells, wind turbine-based generators, flywheel, and aqua electrolyzer is proposed [
11]. Metaheuristic optimization algorithms have become quite prominent in different areas of engineering. A combined cycle’s automatic generation control gas turbine generation plant with traditional controller’s parameter tuning is proposed by the authors utilizing the Firefly Algorithm [
12]. For two area thermal systems with wide load fluctuations, a Teaching- and Learning-Based Optimization-based algorithm with a 2-Degree of Freedom of PID controller is proposed [
13]. For Automatic Generation Control in a deregulated environment, a hybrid-based Teaching–Learning-oriented optimization and pattern-searching methodology is proposed by the authors, and the findings are compared with Genetic Algorithms and Differential Evolution [
14].
Renewable energy with better result attainment for the performance of AGC is presented in the work [
15]. One of those algorithms is the Grey Wolf Optimizer (GWO), inspired by grey wolves [
16]. In this algorithm, the optimizer simulates the key leadership configuration and the hunting procedure of the grey wolves. The leadership pyramid is an imitation using four types of grey wolves, namely alpha, delta, beta, and omega. The authors presented a mathematical prototype to assess the impression of trifling photovoltaic power plants on performance factors considering the economics of a bigger power system [
17]. The use of the grey wolf optimization algorithm for the thermal energy systems incorporated in three control areas for the solution AGC problem is proposed by the authors. In the same work, a conventional thermal system with a single-stage turbine (reheat) and adequate generation constraints (rate) is considered. The algorithm estimates the performances of the proportional–integral, integral, and PID controllers with good accuracy [
18]. Authors have suggested a quasi-oppositional dragonfly approach for the tuning of PID control attributes by considering the three-area model. The results are shown with the help of time absolute error [
19]. A mathematical standard of trivial (rooftop) photovoltaic (PV) generating station has been established by the authors of [
20]. The AGC solutions considering the penetration of the different types of electric vehicles in the electric grids along with the power generation are illustrated by the authors of [
21,
22,
23,
24]. In the research work [
25], the authors suggested an ANN model utilizing the radial basis function for modelling the non-uniform PV system enactments while controlling the frequency variations [
26].
In the past, de-rating techniques have been utilized to qualify frequency backing functions in the PVs; now, for the first time, de-rating techniques are employed to manage voltages in the full PV LV distribution systems [
27]. For generating the appropriate patterns of charging for the Li-ion batteries, battery modeling and multi-objective constricted dynamic programming techniques are proposed. In the same work, an ensemble biogeography-based optimization approach is employed for the best solutions [
28]. Some authors suggested AI-based strategies to extend the life of the battery from both a production and management standpoint. A critical review of cutting-edge AI-based strategies is also provided, considering ANN and ensemble learning [
29]. The authors developed an easily understandable ML algorithm for battery manufacturing. It is also demonstrated that the technique can be applied to predict various components of battery capacities, as well as quantify the dynamic impacts and interconnections of the coating factors very efficiently [
30]. To adjust the class imbalance and accurately categorize three important quality indicators of electrodes, an efficient RUBoost-centered classifier framework is proposed. Similarly, experimental findings demonstrate that the proposed systems can deal with class inequity difficulties and precisely predict the characteristics of the produced electrode [
31]. Being leadless or containing little lead to overcome the problems posed by hazardous lead yield halides, perovskite materials are investigated for use in the photovoltaic system by the authors of [
32]. Research has been undertaken to standardize current AI utilizing deep learning operations in this field after the paper first offers a review of AI and big data in combating COVID-19 [
33]. The authors have discussed using the stacking CQDs of various sizes; the graded band orientation approach is employed to reduce the charge carrier diffusion in QNR [
34]. The exhaustive literature review shows that many researchers have applied different PID controllers for LFC problems. Generally, all have considered simple load variations. In this work, we consider variable and random step load variations in load demands. Additionally, the sensitivity variations of different parameters are examined in a wide range.
Most of the actual-world optimization is inherently nonlinear and multimodal, with a wide range of complicated constraints. Even for a unified purpose, an approach to optimal solutions is always quite impossible. Metaheuristic optimization techniques have gained popularity for solving complex problems that are otherwise challenging to solve using conventional methods. Metaheuristic methods are now being used to find high-quality results for an ever-increasing variety of complex real-world issues, such as combinatorial problems. As these algorithms can handle multi-objective, multi-solution, and non-stationary problems very efficiently.
In the proposed PID controller, the system attributes have been calculated utilizing the metaheuristic algorithm for the estimation of competitive attribute values(parameters). The motivation for this paper is to utilize the metaheuristic algorithm for the tuning of the control parameters of multi-area load frequency control with and without the insertion of renewable energy sources and a wide range of load variations. The cutting-edge Grey Wolf Optimizer (GWO) for obtaining admirable transient and steady-state performances is utilized in this paper. The issue of continuous deficiency of energy possessions is also discussed in this work.
Table 1 shows the full forms of acronyms used in this paper.
The key contributions of the authors in this article are as follows:
Integration of the thermal power generations with the renewable generations for the automatic generation controls, considering variable and random step load variation in load demand;
To achieve the zero-frequency error after the different load variations and maintain the system frequency constant at the specified values using the proposed PID controls;
Maintaining the tie-line power flows at the specified levels for the different changes in load conditions in different generation facilities using the adopted novel meta-heuristic method;
Improved dynamic performance regarding the sensitivity analysis as evidenced by simulation results, shown by control parameters such as undershoot value, overshoot value, and settling time.
3. Modeling of Solar-Based Thermal Plant
The two most viable sources of renewable power are solar PV and wind generation. The solar collector types utilized in solar-based thermal power plants include Parabolic Trough Collectors (PTC), sterling engines(dish), and Flat Plate Collectors (FPC). To obtain the most solar irradiation, the working fluid is carried by the solar collector.
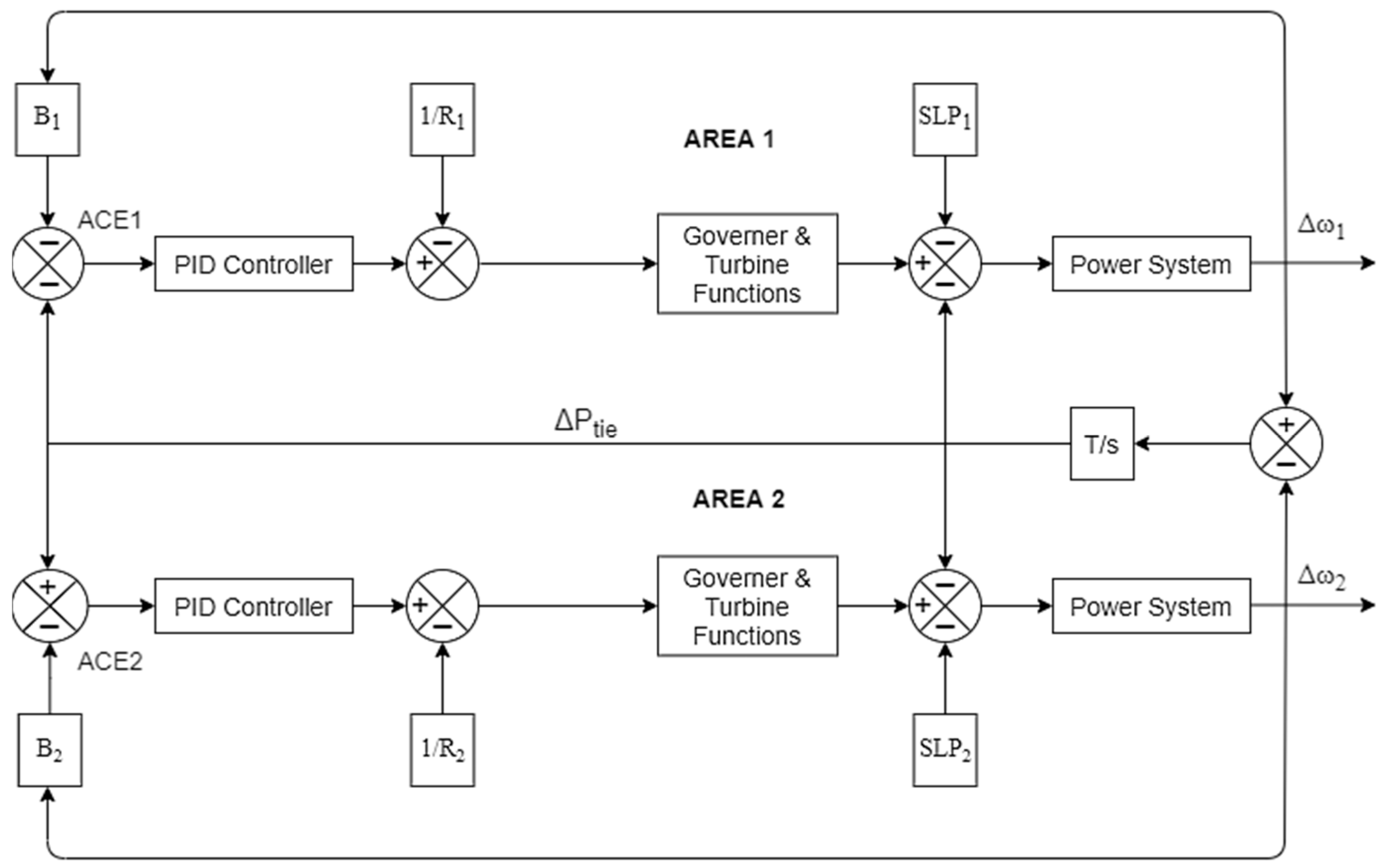
Figure 1 depicts two area systems with thermal (reheat) power plants. These systems have been upgraded to include Solar generation with Thermal Plants generation (STPs) in area 1, while area 2 simply consists of the thermal generation system. For the thermal system, the nominal attribute values were obtained from [
1], and for the solar thermal system, the same is taken from [
13].
and are the constants for frequency biases in area 1 and area 2;
and are speed directive attributes for governor of area 1 and area 2;
and are load deviations (step changes) in area 1 and area 2;
and are ACE in area 1 and area 2;
shows the alteration in tie power flow amid area 1 and area 2;
and represent changes in frequency/frequency aberrations in area 1 and area 2.
In
Figure 3, arrow
indicates the direction of fluid flow. A fluid of temperature
is released. I demonstrate the way solar radiation heats pipes and stores energy in working fluid. The symbols used are as follows:
= collector (outlet fluid) temperature (°C);
= solar radiation across collection plane
;
= collector (inlet fluid) temperature (°C);
= collector (environment) temperature (°C);
= flow rate of collector (or pump) (
);
= collector optical efficiency;
= collector complete heating loss coefficient
;
= heat capacity (specific) of collector fluid
;
=
, heat capacity of the fluid of collector
;
= surface area of the collector (
;
= collector heat transfer volume
;
= collector (fluid) corpus density
.
Collector Model
A simpler solar collector is considered to use a constant fluid flow rate. The value of
from Equation (3) is substituted in Equation (2).
Equation (4) represents time requirement of variables:
Then, Equation (2) is arranged in a manner that input parameter is placed on left side, and output parameters are placed in right side, so the new equation is as shown in Equation (5):
Applying Laplace transform to Equation (5):
Outcome of Laplace transform is shown in Equation (7) as follows:
Reorganizing Equation (7), we obtain output–input relation, as shown in Equation (8):
where variable
τ represents collector time constant.
Output is assumed by considering only input as
, and
, putting other input zero, and neglecting initial conditions, then we obtain
The effect of initial condition on
is as follows:
Equation (13) shows individual effect on Equation (10) as follows:
The transfer rate of heat is assumed to be constant in collector’s model. This transfer function is the output Laplace transform
about the input Laplace transform (
. Outlet temperature’s initial conditions are selected to make solar field model more realistic.
where variable τ represents time constant of collector and is also shown by
.
The difference between input (inlet) and the surrounding temperatures is minimal. Equation (15) shows the function of the solar strength with respect to irradiance (solar):
In the above, variable
represents the gain of the collector.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}