

Combining Heterogeneous Vehicles to Build a Low-Cost and Real-Time Wireless Charging Sensor Network



Abstract
:1. Introduction
Motivation and Contribution
- In this work, we try to integrate UAVs, VANET, pads, and WRSN together to construct a high-efficiency and low-cost wireless charging system for a large-scale wireless sensor network. To the best of our knowledge, no previous work mentions similar wireless charging systems.
- The proposed system suggests that UAVs obtain energy from pads or cars in VANET, and sensors obtain energy from UAVs. Specifically, UAVs can be charged by landing on pads that are connected to a fixed power supply. Moreover, UAVs can also obtain additional power from nearby vehicles in a VANET to save a considerable amount of extra power and time for flying to and from the base station or pads. At the same time, UAVs can be carried and charged on the top of the cars in VANET to move toward the target sensor to save power and charging time.
- Moreover, because the cars in VANET are already built, there is no need to pay a lot in deployment costs. Additionally, the system can reduce UAV deployment and management costs due to UAV sharing and improve charging efficiency at the same time.
- In this work, a reward mechanism is mentioned to encourage private cars to provide transportation and charging capabilities to UAVs in the designed system.
2. Related Studies
3. Integrating Heterogeneous Vehicles to Form a Novel Charging System
- Cars in a VANET often have redundant electronic power sources that can be shared with other UAVs if the owner of the cars likes to do so. The cars in VANET can be equipped with a charging dock at the root of them for possible UAVs to land on for power transfer.
- Electric cars have become more popular with consumers in recent years, and their number is increasing in all countries.
- Cars in VANET carried with UAVs provide an opportunity for UAVs to move quickly without consuming their own power sources, and the cars can also charge them (when moving from one place to another at the same time) with the help of a charging dock (pad) on the roof of the cars in VANET.
- Cars in a VANET move autonomously and uncontrolled and are not easy to predict. Especially for non-periodic vehicles, it is not easy to use these cars to plan and assist the movement of UAVs or provide additional charging services.
- When the car in a VANET moves too fast, it may be a technical problem for a UAV to land and dock on the car.
- A car in a VANET does not necessarily install a charging pad on the root, or its owner is unwilling to share and provide charging or moving services to other UAVs. Designing a feedback mechanism to encourage this kind of car sharing is also a challenging issue.
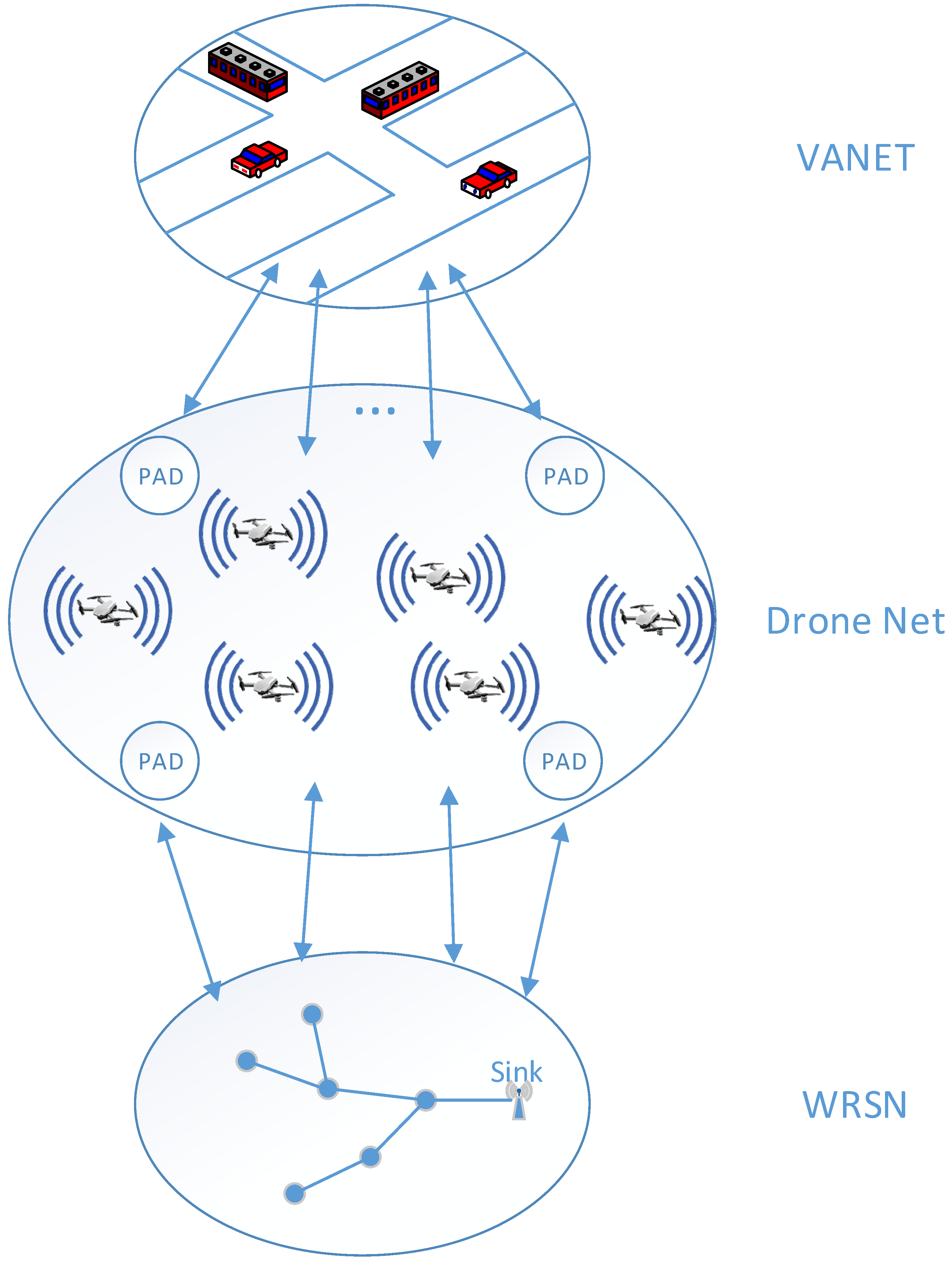
- Layer (1)
- All sensors in the WRSN are used to monitor the area of interest and send important monitoring information to the sink via the adopted routing protocol. In this system, the purpose of communicating at this layer is to transmit the monitored information and necessary control packets to complete the wireless charging task. Note that the charging schedule adopted for the entire WRSN can be proactive, on demand, or a mixed one.
- Layer (2)
- In this layer, the drone net forms a wireless ad hoc network, including UAVs and WCPs. The purpose of UAVs is to provide an additional power supply to the sensors. When the system dispatches multiple UAVs to fly to the target sensors, the UAVs will wirelessly charge the relevant sensors and wait for an opportunity to return back to the base station (or the sink) after completing the charging tasks. Usually, a small number of pads are deployed in Layer (2) to provide short stays for UAVs, wireless charging to extend the flight distance of UAVs, and can also assist in communication tasks (such as being a cluster head when a hierarchy routing protocol is applied). In the proposed system, the communication task on the drone net in this layer is mainly to plan the flight path of UAVs to avoid possible UAV collisions or exchange wireless charging tasks between the two UAVs when necessary.
- Layer (3)
- This layer is mainly composed of cars in a VANET, and its main task is to provide UAVs in the drone net with both charging and moving services. UAVs can fly to the dock mounted on the roof of a nearby vehicle to move to another place with the vehicle, and energy transfer to the UAVs can be carried out with the help of the charging equipment of this vehicle. In this system, the communication task of Layer (3) is mainly to collect the movement paths of cars in VANET and provide that to the UAV for selecting the proper cars for further moving and charging.
4. Cooperation between the Three Layers in the Proposed Charging System
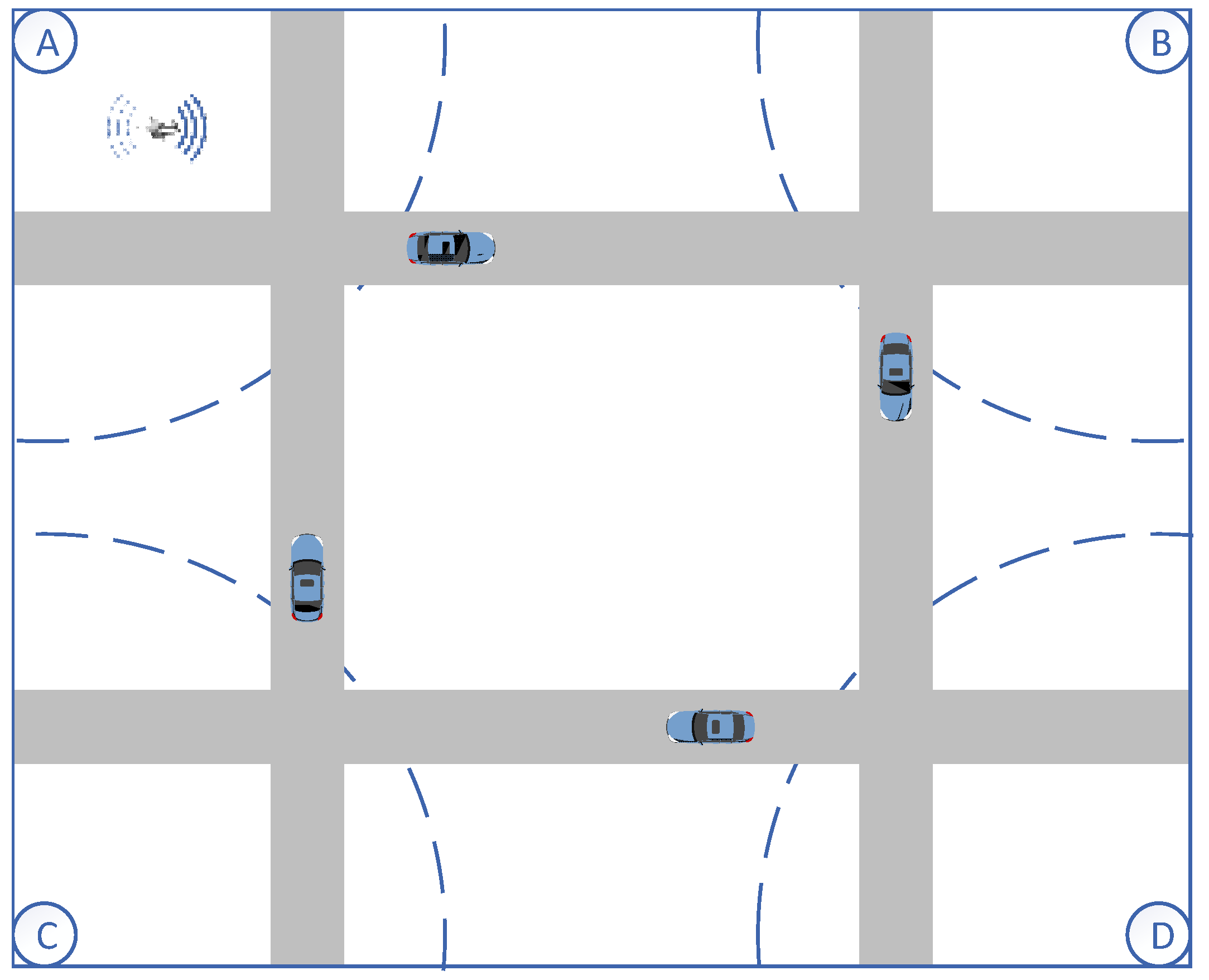
4.1. Roles and Numbers of Pads in the Proposed System
4.2. Reward Mechanism
4.3. Discussions and Comparisons
- The flying range is more limited. Due to the power required to charge the sensor, the UAV’s flying distance is shorter, and it can only charge a small-scale sensor network.
- Poor charging efficiency. In order to charge a sensor, the UAV needs to fly the distance to and from the base station, utilizing a considerable amount of extra power and time.
- For a sensor network with a wide distribution range, the establishment cost is extremely high. Limited by the flight distance of UAVs, a large-scale sensor network needs to be divided into many small subnetworks, and each such network owns a base station and dedicated UAVs, which increases deployment costs a lot. Moreover, the deployed UAVs of each sub-network cannot be shared, resulting in the dilemma that some spare UAVs in one subnetwork cannot support charging missions in another subnetwork.
- The segmentation of each sub-network and the corresponding base station deployment are static, which cannot dynamically adapt to a more dynamic network.
- In the proposed system, UAVs are used to charge the requested sensors in a WRSN. When the amount of batteries in UAVs is below a predefined threshold, these UAVs can be charged by landing on pads that are connected to a fixed power supply. In the system, we use pads to extend the flight distance of UAVs and improve charging efficiency at a very low deployment cost.
- Due to the wide deployment area and cost considerations, we cannot deploy pads everywhere in the proposed system. However, UAVs can also obtain additional power from nearby vehicles in a VANET to save a considerable amount of extra power and time for flying to and from the base station or pads. Moreover, because the cars in VANET are already built, there is no need to spend a lot on deployment costs. At the same time, UAVs can also use the cars in VANET to move toward the target sensor to save power and charging time. Moreover, the system can reduce UAV deployment and management costs due to UAV sharing and improve charging efficiency at the same time.
- These pads are also equipped with a wireless communication system that can be used to communicate with UAVs, a car in VANET, and sensors in the deployed sensor networks. From this perspective, pads are more akin to a gateway that connects WRSN, drone net, and VANET.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Degen, C. Inductive Coupling for Wireless Power Transfer and Near-Field Communication. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 121. [Google Scholar] [CrossRef]
- Zhang, X. An Intelligent Wireless Charger Based on the Internet of Things. Secur. Commun. Netw. 2021, 2021, 5558914. [Google Scholar] [CrossRef]
- Singh, D.; Ouamri, M.A.; Alzaidi, M.S.; Alharbi, T.E.A.; Ghoneim, S.S.M. Performance Analysis of Wireless Power Transfer Enabled Dual Hop Relay System Under Generalised Fading Scenarios. IEEE Access 2022, 10, 114364–114373. [Google Scholar] [CrossRef]
- Singh, D.; Ouamri, M.A.; Muthanna, M.S.A.; Adam, A.B.M.; Muthanna, A.; Koucheryavy, A.; El-Latif, A.A.A. A Generalized Approach on Outage Performance Analysis of Dual-Hop Decode and Forward Relaying for 5G and beyond Scenarios. Sustainability 2022, 14, 12870. [Google Scholar] [CrossRef]
- Zhao, M.; Li, J.; Yang, Y. A framework of joint mobile energy replenishment and data gathering in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 2689–2705. [Google Scholar] [CrossRef]
- Slhu, Y.; Yousefi, H.; Cheng, P.; Chen, J.; Gu, Y.; He, T.; Shin, K.G. Near-Optimal Velocity Control for Mobile Charging in Wireless Rechargeable Sensor Networks. IEEE Trans. Mob. Comput. 2016, 15, 1699–1713. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.-S.; Chen, J.-J.; Gao, X.-Y.; Chen, T.-C. Mobile Charging Strategy for Wireless Rechargeable Sensor Networks. Sensors 2022, 22, 359. [Google Scholar] [CrossRef]
- Zhang, Q.; Cheng, R.; Zheng, Z. Energy-efficient renewable scheme for rechargeable sensor networks. J. Wirel. Commun. Netw. 2020, 2020, 74. [Google Scholar] [CrossRef] [Green Version]
- Raza, A.; Bukhari, S.H.R.; Aadil, F.; Iqbal, Z. An UAV-assisted VANET architecture for intelligent transportation system in smart cities. Int. J. Distrib. Sens. Netw. 2021, 17, 15501477211031750. [Google Scholar] [CrossRef]
- He, Y.; Zhai, D.; Wang, D.; Tang, X.; Zhang, R. A Relay Selection Protocol for UAV-Assisted VANETs. Appl. Sci. 2020, 10, 8762. [Google Scholar] [CrossRef]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless charging techniques for UAVs: A review, reconceptualization, and extension. IEEE Access 2018, 6, 29865–29883. [Google Scholar] [CrossRef]
- Zorbas, D.; Douligeris, C. Computing drone positions to wirelessly recharge IoT devices. In Proceedings of the IEEE INFOCOM Workshops: Wireless Sensor, Robot and UAV Networks, Honolulu, HI, USA, 15–19 April 2018; pp. 628–633. [Google Scholar]
- Ahmad, A.; Alam, M.S. Magnetic Analysis of Copper Coil Power Pad with Ferrite Core for Wireless Charging Application. Trans. Electr. Electron. Mater. 2019, 20, 165–173. [Google Scholar] [CrossRef]
- Li, F.; Wang, Y. Routing in Vehicular Ad Hoc Networks: A Survey. IEEE Veh. Technol. Mag. 2007, 2, 12–22. [Google Scholar] [CrossRef]
- Zhong, P.; Xu, A.; Zhang, S.; Zhang, Y.; Chen, Y. EMPC: Energy-Minimization Path Construction for data collection and wireless charging in WRSN. Pervasive Mob. Comput. 2021, 73, 101401. [Google Scholar] [CrossRef]
- Dai, H.; Wu, X.; Chen, G.; Xu, L.; Lin, S. Minimizing the number of mobile chargers for large-scale wireless rechargeable sensor networks. Comput. Commun. 2014, 46, 54–65. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, X.; Zhang, D.; Zeng, F. Collaborative mobile charging policy for perpetual operation in large-scale wireless rechargeable sensor networks. Neurocomputing 2017, 270, 137–144. [Google Scholar] [CrossRef]
- Amin, A.; Liu, X.-H.; Saleem, M.A.; Henna, S.; Islam, T.; Khan, I.P.U.; Qurashi, M.Z.; Mirjavadi, S.S.; Forsat, M. Collaborative Wireless Power Transfer in Wireless Rechargeable Sensor Networks. Wirel. Commun. Mob. Comput. 2020, 2020, 9701531. [Google Scholar] [CrossRef]
- Chen, J.; Yu, C.W.; Cheng, R.-H. Collaborative Hybrid Charging Scheduling in Wireless Rechargeable Sensor Networks. IEEE Trans. Veh. Technol. 2022, 71, 8994–9010. [Google Scholar] [CrossRef]
- Chen, J.; Yu, C.W. Collaborative Charging Scheduling of Hybrid Vehicles in Wireless Rechargeable Sensor Networks. Energies 2022, 15, 2256. [Google Scholar] [CrossRef]
- Sang, Q.; Wu, H.; Xing, L.; Xie, P. Review and Comparison of Emerging Routing Protocols in Flying Ad Hoc Networks. Symmetry 2020, 12, 971. [Google Scholar] [CrossRef]
- Siddiqi, M.H.; Draz, U.; Ali, A.; Iqbal, M.; Alruwaili, M.; Alhwaiti, Y.; Alanazi, S. FANET: Smart city mobility off to a flying start with self-organized drone-based networks. IET Commun. 2022, 16, 1209–1217. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 11, 579. [Google Scholar] [CrossRef] [PubMed]
- Butt, F.A.; Chattha, J.N.; Ahmad, J.; Zia, M.U.; Rizwan, M.; Naqvi, I.H. On the Integration of Enabling Wireless Technologies and Sensor Fusion for Next-Generation Connected and Autonomous Vehicles. IEEE Access 2022, 10, 14643–14668. [Google Scholar] [CrossRef]
- Alparslan, O.; Arakawa, S.; Murata, M. Next Generation Intra-Vehicle Backbone Network Architectures. In Proceedings of the 2021 IEEE 22nd International Conference on High Performance Switching and Routing (HPSR), Paris, France, 7–10 June 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Hakak, S.; Gadekallu, T.R.; Maddikunta, P.K.R.; Ramu, S.P.; Parimala, M.; Alwis, C.D.; Liyanage, M. Autonomous vehicles in 5G and beyond: A survey. Veh. Commun. 2023, 39, 100551. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 18–36. [Google Scholar] [CrossRef]
- Jin, Y.; Xu, J.; Wu, S.; Xu, L.; Yang, D. Enabling the Wireless Charging via Bus Network: Route Scheduling for Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1827–1839. [Google Scholar] [CrossRef]
- Jin, Y.; Xu, J.; Wu, S.; Xu, L.; Yang, D.; Xia, K. Bus network assisted drone scheduling for sustainable charging of wireless rechargeable sensor network. J. Syst. Archit. 2021, 116, 102059. [Google Scholar] [CrossRef]
- Hussain, A.; Bui, V.-H.; Kim, H.-M. Deep reinforcement learning-based operation of fast charging stations coupled with energy storage system. Electr. Power Syst. Res. 2022, 210, 108087. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Zywiołek, J. A Comprehensive Review of Micro UAV Charging Techniques. Micromachines 2022, 13, 579. [Google Scholar] [CrossRef]
- Hoseini, S.A.; Hassan, J.; Bokani, A.; Kanhere, S.S. In Situ MIMO-WPT Recharging of UAVs Using Intelligent Flying Energy Sources. Drones 2021, 5, 89. [Google Scholar] [CrossRef]
- Ravi, P.; Wang, M.; Scott, M.J. Solar powered UAV charging strategy design by machine learning. J. Smart Environ. Green Comput. 2022, 2, 126–142. [Google Scholar] [CrossRef]
- Zhang, J.; Lou, M.; Xiang, L.; Hu, L. Power cognition: Enabling intelligent energy harvesting and resource allocation for solar-powered UAVs. Future Gener. Comput. Syst. 2020, 110, 658–664. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| WRSN | Proactive Schedule | On-Demand Schedule | |
|---|---|---|---|
| VANET | |||
| dense deployment | less pads | minimum pads required | |
| sparse deployment | maximum pads required | more pads | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, R.-H.; Yu, C.-W. Combining Heterogeneous Vehicles to Build a Low-Cost and Real-Time Wireless Charging Sensor Network. Energies 2023, 16, 3418. https://doi.org/10.3390/en16083418
Cheng R-H, Yu C-W. Combining Heterogeneous Vehicles to Build a Low-Cost and Real-Time Wireless Charging Sensor Network. Energies. 2023; 16(8):3418. https://doi.org/10.3390/en16083418
Chicago/Turabian StyleCheng, Rei-Heng, and Chang-Wu Yu. 2023. "Combining Heterogeneous Vehicles to Build a Low-Cost and Real-Time Wireless Charging Sensor Network" Energies 16, no. 8: 3418. https://doi.org/10.3390/en16083418
APA StyleCheng, R.-H., & Yu, C.-W. (2023). Combining Heterogeneous Vehicles to Build a Low-Cost and Real-Time Wireless Charging Sensor Network. Energies, 16(8), 3418. https://doi.org/10.3390/en16083418