
A Model Independent Predictive Control of PMSG Wind Turbine Systems with a New Mechanism to Update Variables

Abstract
:1. Introduction
- A new effective model-independent predictive control for both the generator and the grid side of high-power PMSG wind turbine systems is presented (see Section 4). The proposed method is immune to both generator- and grid-side parameter mismatches and model deviations. Robustness improvement of the proposed method outperforms the classical model-based MPC technique (see Section 5.2);
- A new state variable variation updating mechanism is proposed, which assures smooth current/power variation waveforms and non-lag updating. The proposed solution is analytically developed and requires many fewer online calculations in comparison with the recently reported approaches (see Section 4);
- The proposed solution is tested in various scenarios (see Section 5), which show promising results in enhanced robustness.
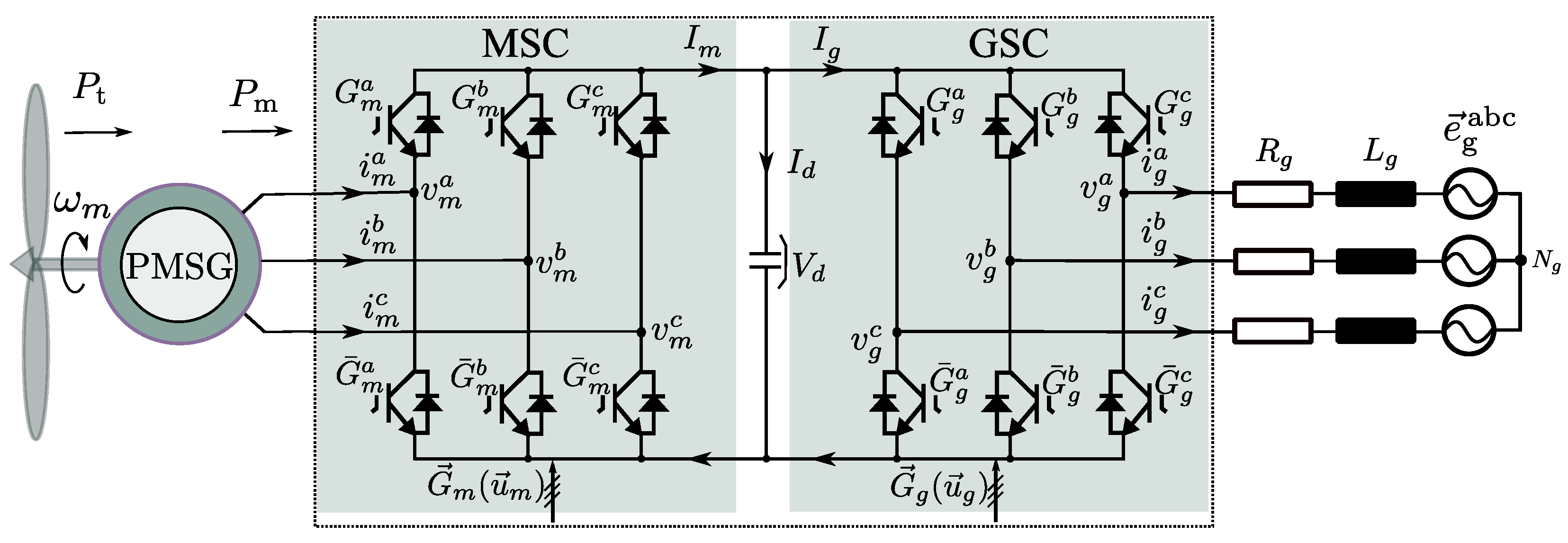
2. System Description and Modeling
3. Classical Direct Model Predictive Control Methods
3.1. System Requirements and Cost Function Design
- Torque/current control:The primary torque/current control must have a promising dynamic performance to generate proper reference considering: (a) MPPT of the wind turbine system or (b) suitable torque generation for supercritical wind speed. Stress on the mechanical components needs to be reduced by minimizing torque ripples and current THDs;
- Complex power control: The GSC must regulate the grid-side complex power quickly and dynamically to reduce fluctuations in the DC link caused by the intermittent feed-in of wind power. To meet the requirements of the Grid Code, a low-current distortion factor should be ensured;
- DC-link voltage control: A stable DC-link voltage is required for the proper operation of the system;
- Switching frequency regulation: As the wind turbine power level rises, needed improvement of efficiency at any point requires reducing switching losses by low switching frequencies.
3.2. Classical Direct Model Predictive Control
3.3. A Latest Model-Independent Predictive Control Solution
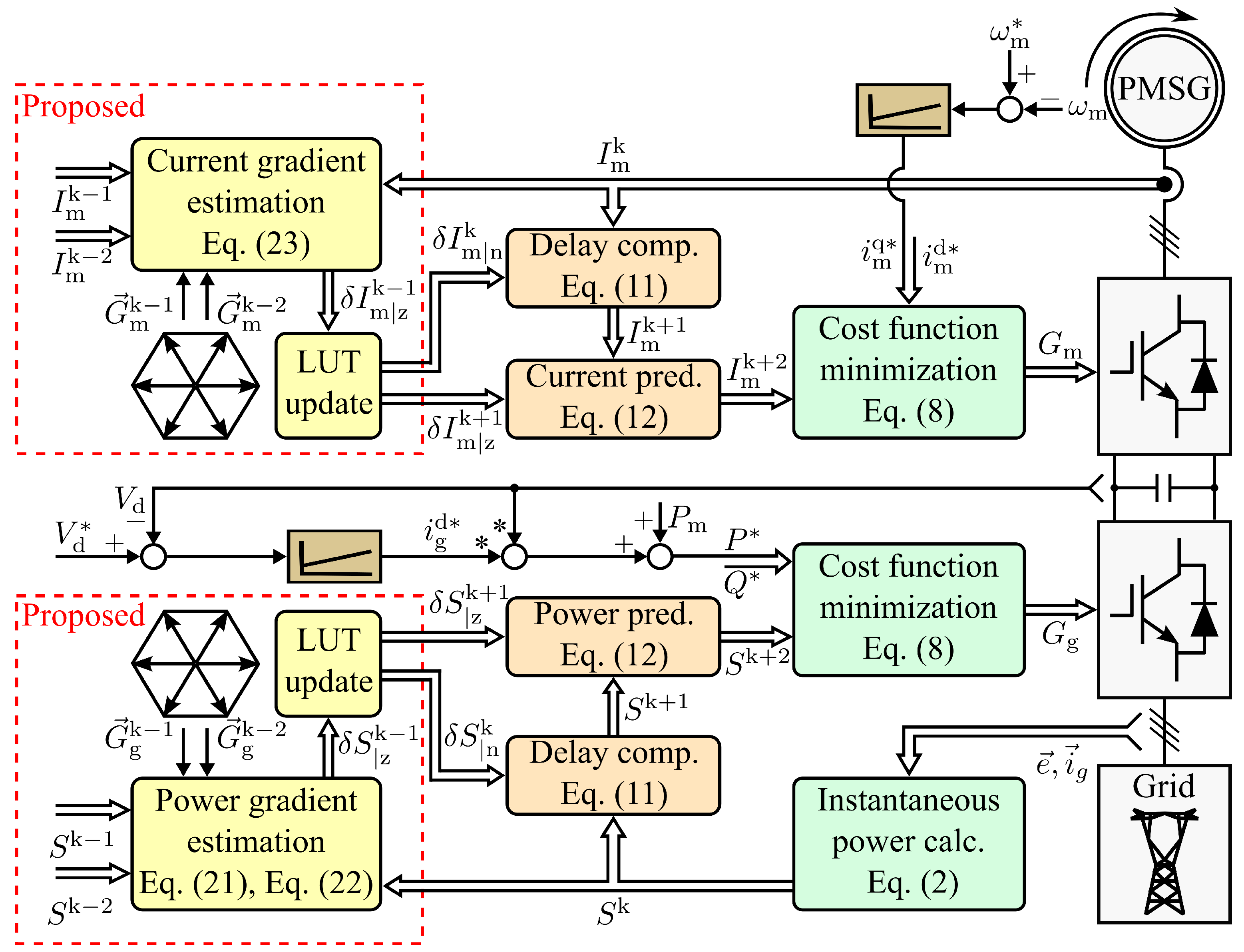
4. Proposed Model-Independent Predictive Control Solution
4.1. Small-Signal Modeling of the System
4.2. Look-Up Table Update Principle
5. Verification
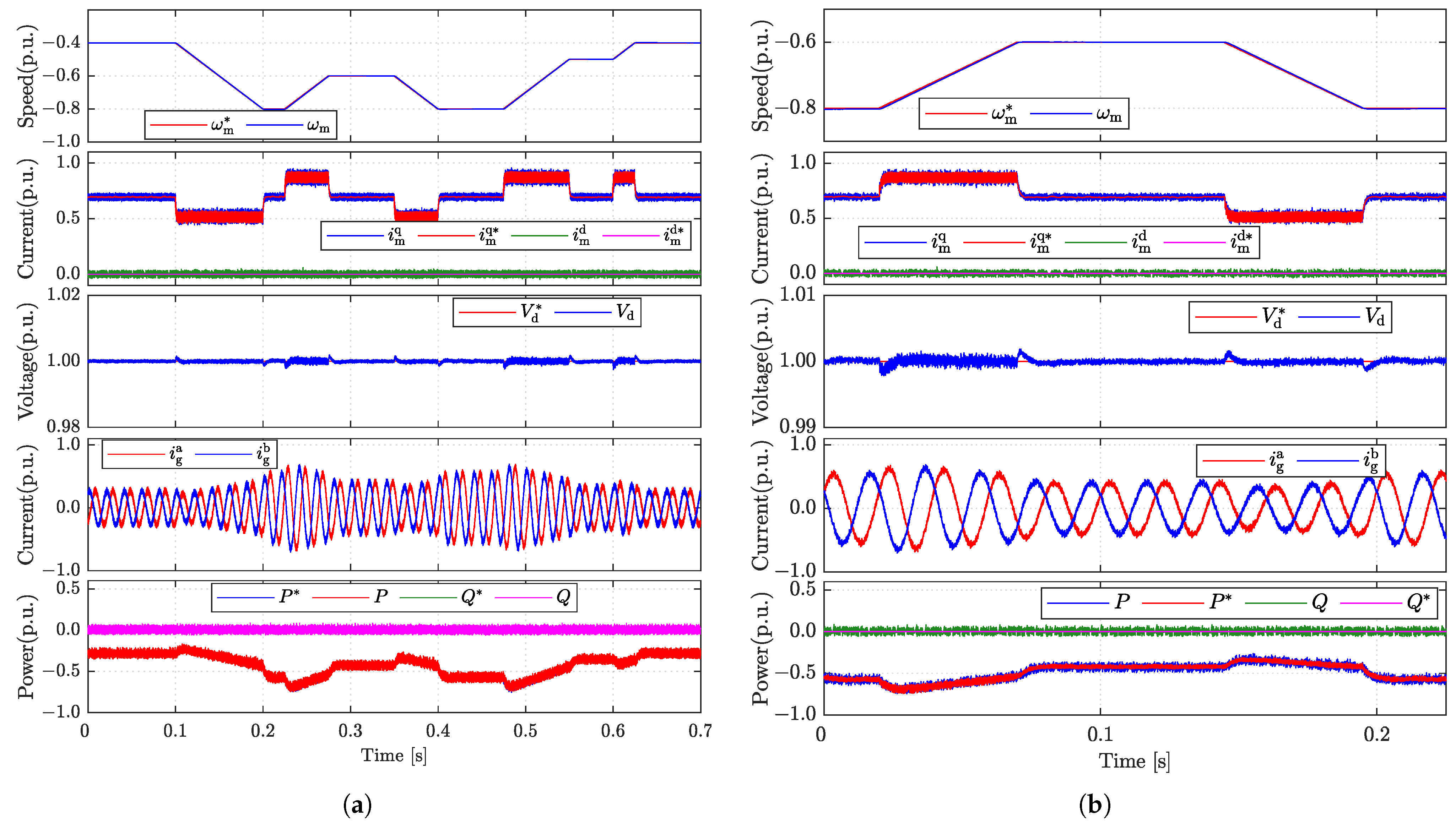
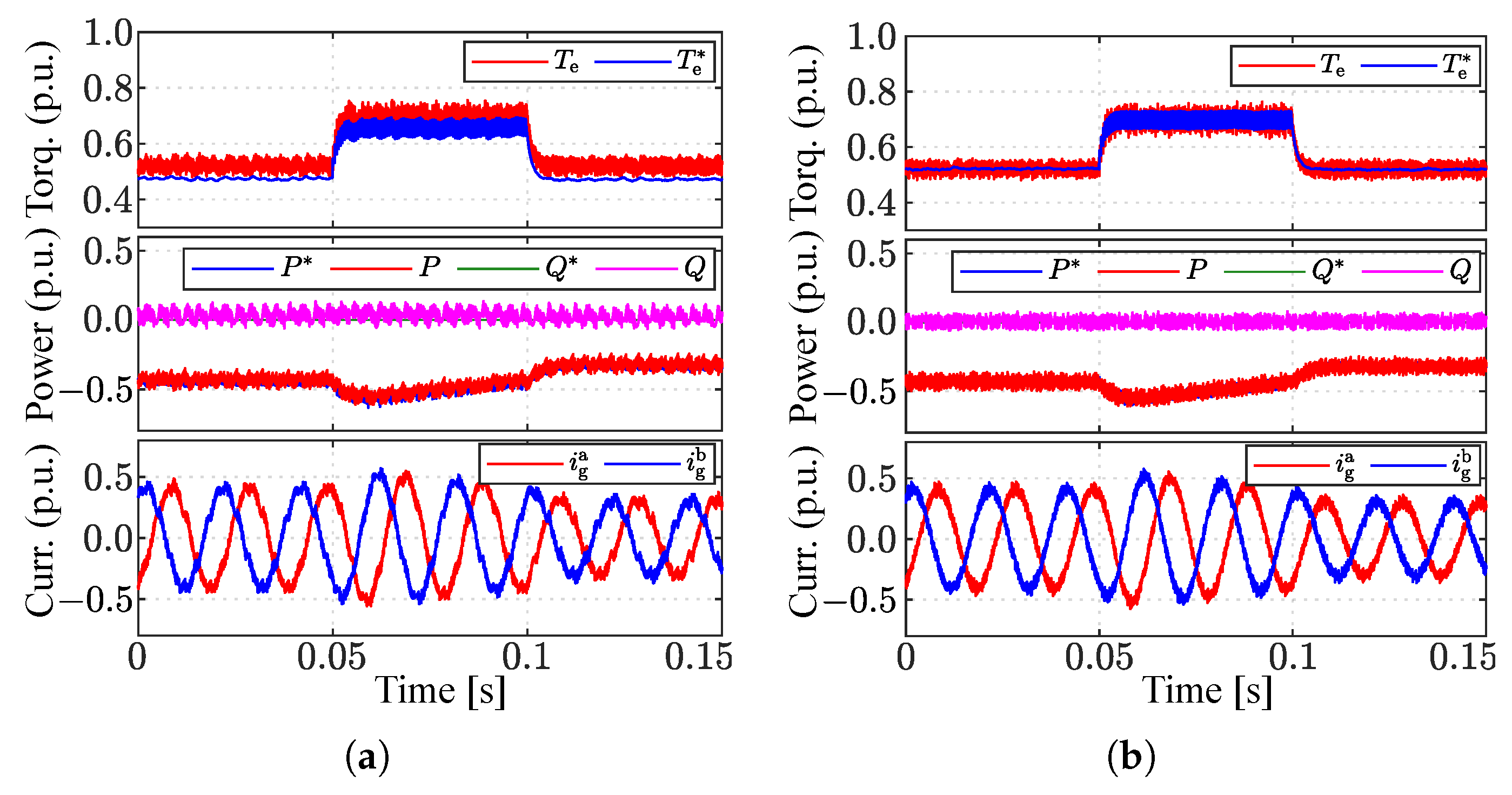
5.1. Overall Validation of the Proposed Method
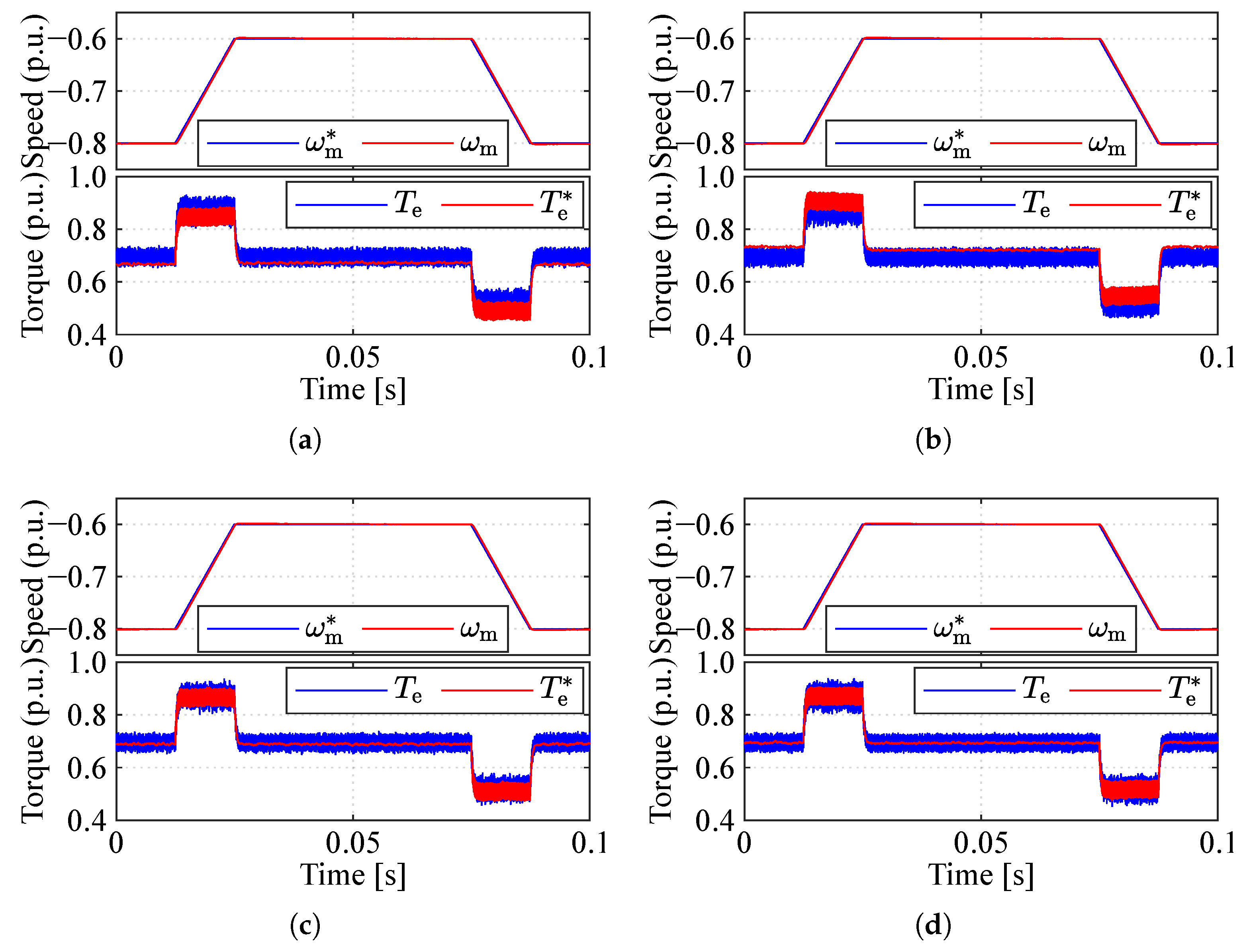
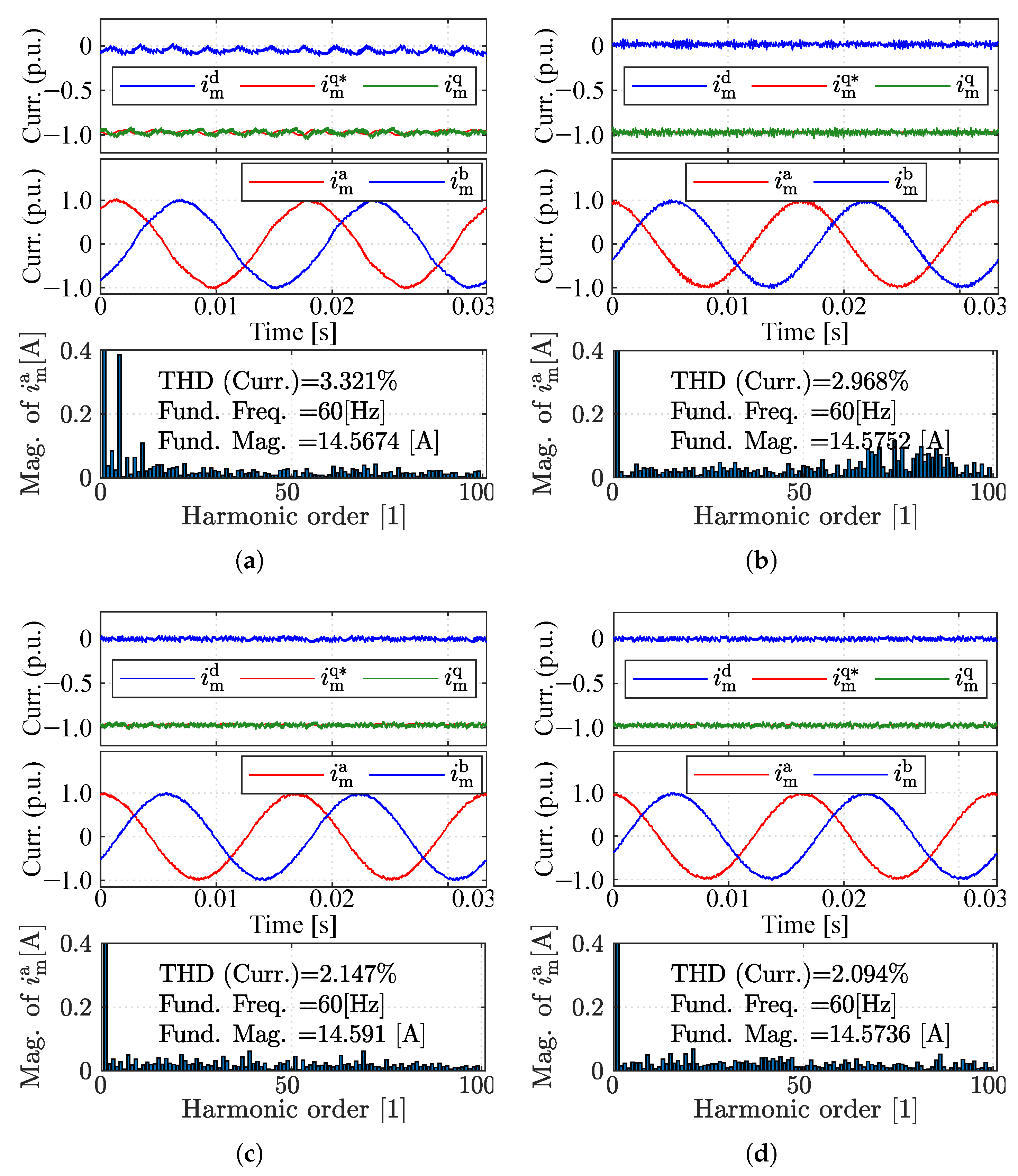
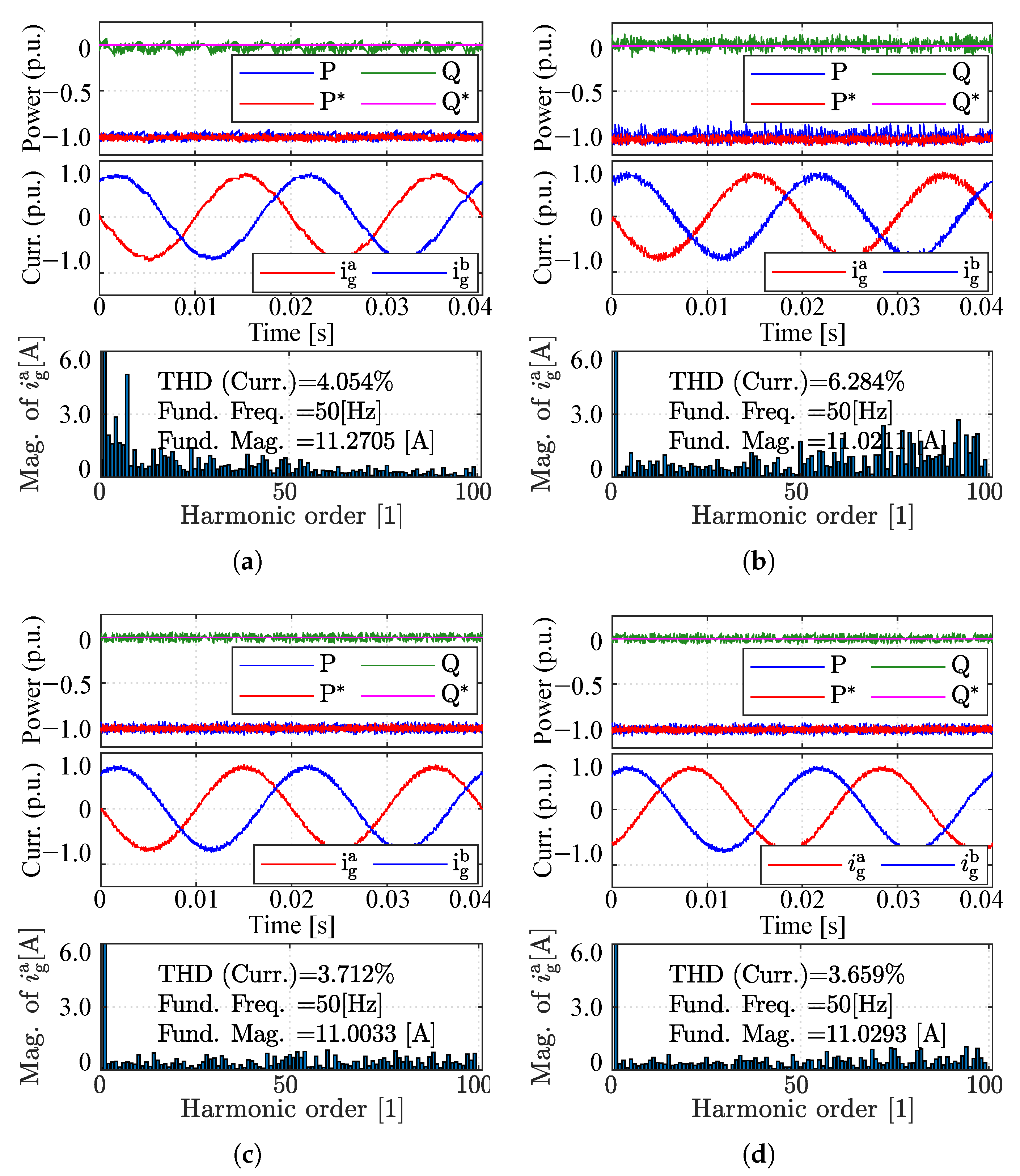
5.2. Robustness Comparison
5.3. Current/Power Update Mechanism Comparison between the Proposed and the Classical MIPC
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nadeem, M.; Zheng, X.; Tai, N.; Gul, M.; Tahir, S. Analysis of Propagation Delay for Multi-Terminal High Voltage Direct Current Networks Interconnecting the Large-Scale Off-Shore Renewable Energy. Energies 2018, 11, 2115. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Zhang, Z.; Zhang, Y.; Li, Y.; Li, Z. A Time-Domain Virtual-Flux Based Predictive Control of Modular Multilevel Converters for Offshore Wind Energy Integration. IEEE Trans. Energy Convers. 2021, 37, 1803–1814. [Google Scholar] [CrossRef]
- Steffen, J.; Lengsfeld, S.; Jung, M.; Ponick, B.; Herranz Gracia, M.; Spagnolo, A.; Klöpzig, M.; Schleicher, K.; Schäfer, K. Design of a Medium Voltage Generator with DC-Cascade for High Power Wind Energy Conversion Systems. Energies 2021, 14, 3106. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ma, K. Future on Power Electronics for Wind Turbine Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 139–152. [Google Scholar] [CrossRef]
- Liserre, M.; Cardenas, R.; Molinas, M.; Rodriguez, J. Overview of Multi-MW Wind Turbines and Wind Parks. IEEE Trans. Ind. Electron. 2011, 58, 1081–1095. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Z.; Kazmierkowski, M.P.; Rodriguez, J.; Kennel, R. Robust Predictive Control of Three-Level NPC Back-to-Back Power Converter PMSG Wind Turbine Systems with Revised Predictions. IEEE Trans. Power Electron. 2018, 33, 9588–9598. [Google Scholar] [CrossRef]
- Singh, V.; Tripathi, R.; Hanamoto, T. HIL Co-Simulation of Finite Set-Model Predictive Control Using FPGA for a Three-Phase VSI System. Energies 2018, 11, 909. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Sun, T.; Wang, F.; Rodriguez, J.; Kennel, R. A Computationally Efficient Quasi-Centralized DMPC for Back-to-Back Converter PMSG Wind Turbine Systems without DC-Link Tracking Errors. IEEE Trans. Ind. Electron 2016, 63, 6160–6171. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, F.; Wang, J.; Rodriguez, J.; Kennel, R. Nonlinear Direct Control for Three-Level NPC Back-to-Back Converter PMSG Wind Turbine Systems: Experimental Assessment With FPGA. IEEE Trans. Ind. Inform. 2017, 13, 1172–1183. [Google Scholar] [CrossRef]
- Zhang, Z.; Fang, H.; Gao, F.; Rodriguez, J.; Kennel, R. Multiple-Vector Model Predictive Power Control for Grid-Tied Wind Turbine System with Enhanced Steady-State Control Performance. IEEE Trans. Ind. Electron. 2017, 64, 6287–6298. [Google Scholar] [CrossRef]
- Lyu, Z.; Wu, X.; Gao, J.; Tan, G. An Improved Finite-Control-Set Model Predictive Current Control for IPMSM under Model Parameter Mismatches. Energies 2021, 14, 6342. [Google Scholar] [CrossRef]
- Xu, Y.; Ding, X.; Wang, J.; Wang, C. Robust Three-vector-based Low-complexity Model Predictive Current Control with Supertwisting-algorithm-based Second-order Sliding-mode Observer for Permanent Magnet Synchronous Motor. IET Power Electron. 2019, 12, 2895–2903. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Z.; Yan, Q.; Huang, N.; Du, G. An Improved Model-Free Current Predictive Control of Permanent Magnet Synchronous Motor Based on High-Gain Disturbance Observer. Energies 2022, 16, 141. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, G.; Lv, X. Model-Free Control Using Improved Smoothing Extended State Observer and Super-Twisting Nonlinear Sliding Mode Control for PMSM Drives. Energies 2021, 14, 922. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Zhang, Z.; Kennel, R. Robust Predictive Control for Direct-Driven Surface-Mounted Permanent-Magnet Synchronous Generators without Mechanical Sensors. IEEE Trans. Energy Convers. 2018, 33, 179–189. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, L.; Zhang, Y. Model Predictive Current Control for PMSM Drives with Parameter Robustness Improvement. IEEE Trans. Power Electron. 2019, 34, 1645–1657. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, Y.; Zhao, Z.; He, Y. Robust Model Predictive Direct Speed Control for SPMSM Drives Based on Full Parameter Disturbances and Load Observer. IEEE Trans. Power Electron. 2020, 35, 8361–8373. [Google Scholar] [CrossRef]
- Hu, M.; Yang, F.; Liu, Y.; Wu, L. Finite Control Set Model-Free Predictive Current Control of a Permanent Magnet Synchronous Motor. Energies 2022, 15, 1045. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodriguez, J. Robustness Improvement of Predictive Current Control Using Prediction Error Correction for Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rodriguez, J. Torque Ripple Reduction of Predictive Torque Control for PMSM Drives With Parameter Mismatch. IEEE Trans. Power Electron. 2017, 32, 7160–7168. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, L.; Wang, J.; Gao, X.; Li, Z.; Zhang, Z. Robust Predictive Current Control of Permanent-Magnet Synchronous Motors with Newly Designed Cost Function. IEEE Trans. Power Electron. 2020, 35, 10778–10788. [Google Scholar] [CrossRef]
- Sabzevari, S.; Heydari, R.; Mohiti, M.; Savaghebi, M.; Rodriguez, J. Model-Free Neural Network-Based Predictive Control for Robust Operation of Power Converters. Energies 2021, 14, 2325. [Google Scholar] [CrossRef]
- Lin, C.-K.; Liu, T.-H.; Yu, J.; Fu, L.-C.; Hsiao, C.-F. Model-Free Predictive Current Control for Interior Permanent-Magnet Synchronous Motor Drives Based on Current Difference Detection Technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Lin, C.-K.; Yu, J.; Lai, Y.-S.; Yu, H.-C. Improved Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 3942–3953. [Google Scholar] [CrossRef]
- Carlet, P.G.; Tinazzi, F.; Bolognani, S.; Zigliotto, M. An Effective Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef] [Green Version]
- Zhou, D.; Jiang, C.; Quan, Z.; Li, Y. Vector Shifted Model Predictive Power Control of Three-Level Neutral-Point-Clamped Rectifiers. IEEE Trans. Ind. Electron. 2020, 67, 7157–7166. [Google Scholar] [CrossRef]
- Zhang, Z.B. On Control of Grid-Tied Back-to-Back Power Converters and Pmsg Wind Turbine Systems. Ph.D. Dissertation, Technical University of Munich, Munich, Germany, 2016. [Google Scholar]
- Zhang, Z.; Wang, F.; Sun, T.; Rodriguez, J.; Kennel, R. FPGA-Based Experimental Investigation of a Quasi-Centralized Model Predictive Control for Back-to-Back Converters. IEEE Trans. Power Electron. 2016, 31, 662–674. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced Control Strategies of Induction Machine: Field Oriented Control, Direct Torque Control and Model Predictive Control. Energies 2018, 11, 120. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| DC-link Voltage | 600 | DC Capacitance | |
| PMSG Inductance = | PMSG Resistance | ||
| Nominal Torque () | 29 | Nominal Power (kVA) | |
| PM Flux | 0.43 | PMSG Pole Pairs (-) | 3 |
| PMSG Inertia | 0.01 | Grid Voltage (V) | |
| Grid Frequency (rad/s) | 100 | Filter Resistance | |
| Filter Inductance (H) | Sampling Time (s) | 50 |
| Control Method | Maximum Torque Error | Generator Current THD | Grid Current THD |
|---|---|---|---|
| Classical DMPC | 4.50% (50% ) | 3.32% (50% ) | 4.05% (50% ) |
| 5.80% (200% ) | 2.97% (200% ) | 6.28% (200% ) | |
| 0.73% (100% ) | 2.15% (100% ) | 3.71% (100% ) | |
| Proposed MIPC | 0.75% | 2.09% | 3.66% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, X.; Li, H.; Zhang, Z. A Model Independent Predictive Control of PMSG Wind Turbine Systems with a New Mechanism to Update Variables. Energies 2023, 16, 3764. https://doi.org/10.3390/en16093764
Zhang Y, Liu X, Li H, Zhang Z. A Model Independent Predictive Control of PMSG Wind Turbine Systems with a New Mechanism to Update Variables. Energies. 2023; 16(9):3764. https://doi.org/10.3390/en16093764
Chicago/Turabian StyleZhang, Yuzhe, Xiaodong Liu, Haitao Li, and Zhenbin Zhang. 2023. "A Model Independent Predictive Control of PMSG Wind Turbine Systems with a New Mechanism to Update Variables" Energies 16, no. 9: 3764. https://doi.org/10.3390/en16093764