
Frequency Regulation Adaptive Control Strategy of Wind Energy Storage System for Wind Speed Uncertainty
Abstract
:1. Introduction
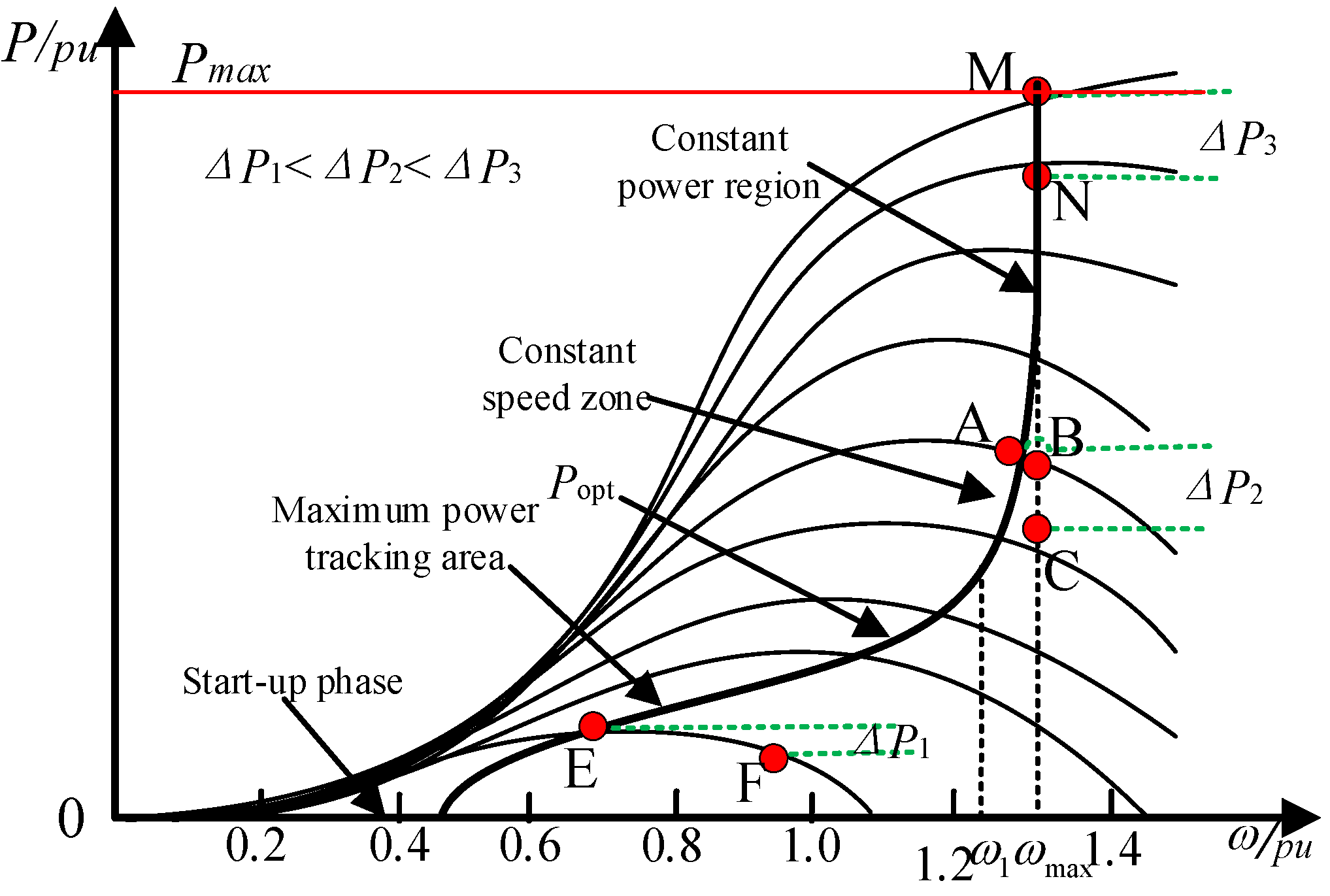
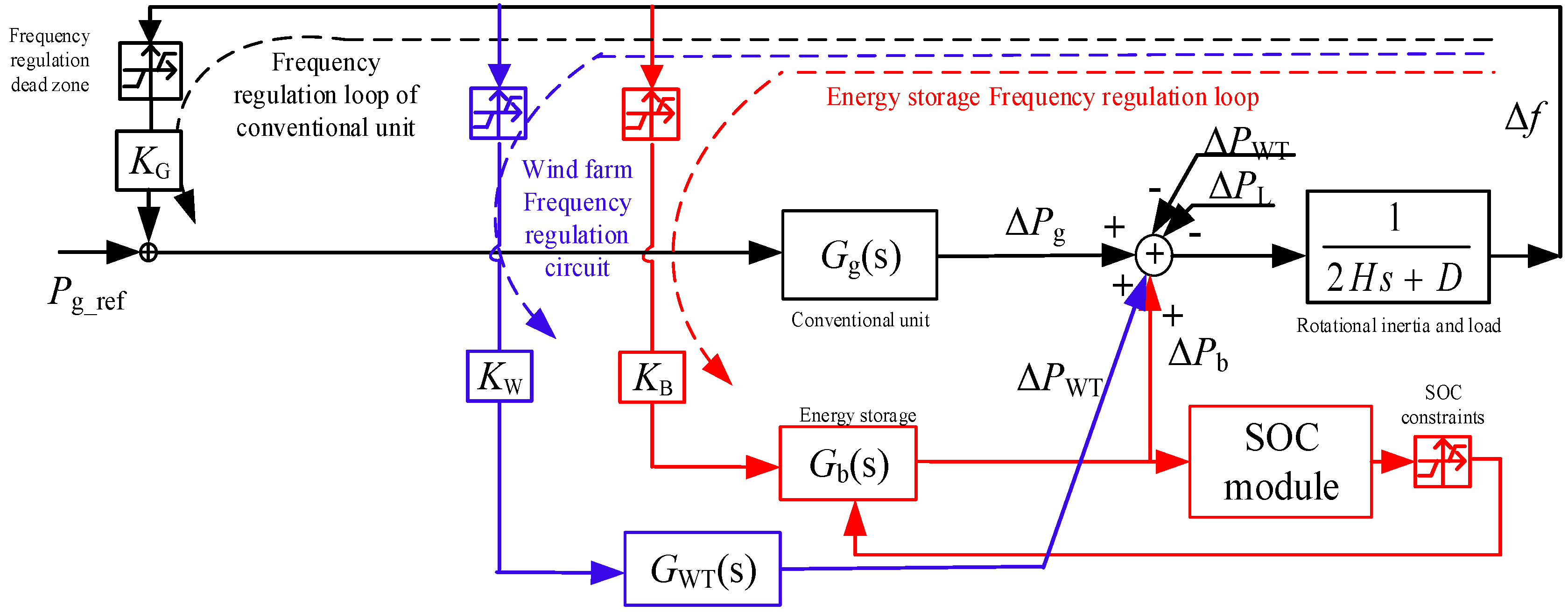
2. Study on Frequency Modulation Uncertainty Mechanism of Wind Turbine
3. SOC Adaptive Adjustment Strategy for Wind Speed Randomness
- (1)
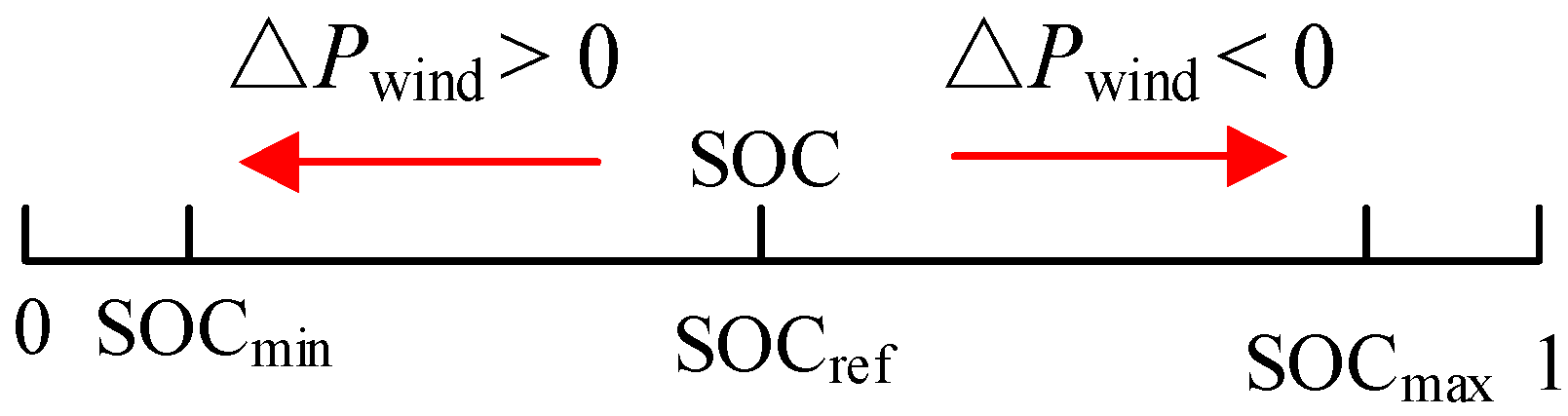
- If the perturbation ∆PL(t + 1) = 0 is predicted at the next time, the SOCref remains unchanged;
- (2)
- If the perturbation quantity ∆PL(t + 1) > 0 is predicted at the next time; at this time, more space should be reserved to store the redundant power generated by the increase in wind speed at the next time, and SOCref should be lowered;
- (3)
- If the perturbation quantity ∆PL(t + 1) < 0 is predicted at the next time; at this time, more power should be stored to make up for the power loss caused by the decrease in wind speed at the next moment, and SOCref should be increased.
4. Optimization Model Based on Model Predictive Control
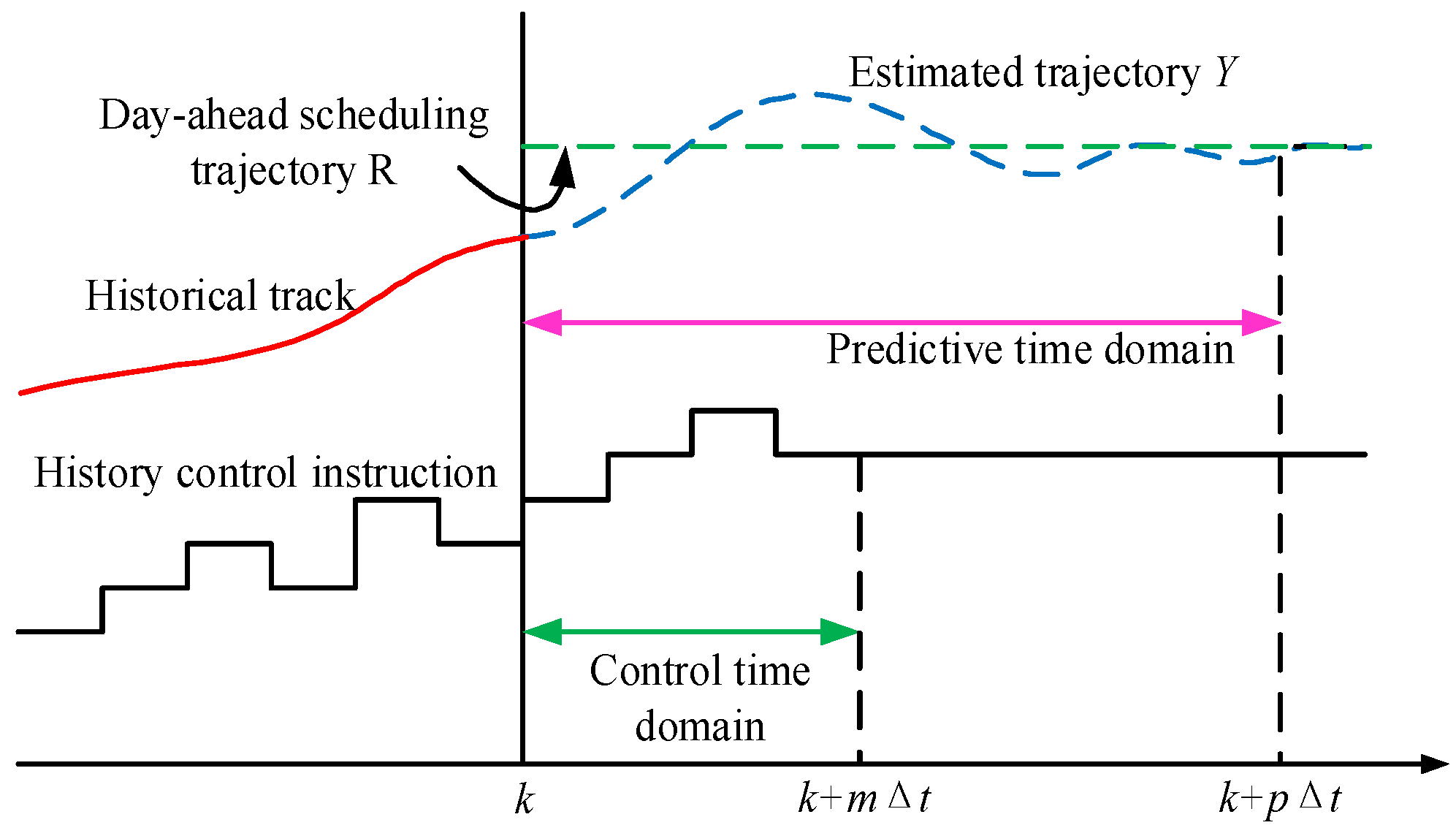
4.1. Introduction to Model Predictive Control
- (1)
- Based on the current moment k and the current state x(k), the state of the system in the future (k~k + p∆t) is predicted, and then, we obtain the future control instruction sequence at time k + m∆t, i.e., k + ∆t, k + 2∆t....
- (2)
- Only the first control instruction in the optimal control sequence is applied to the system;
- (3)
- At the time of k + ∆t, the system state is updated to x(k + ∆t) with the actual control effect as the feedback information. A revised forecast model is obtained based on new forecast information. Then, the preceding steps are repeated.
4.2. Evaluation Equation
4.3. Whale Algorithm Optimization Evaluation Equation
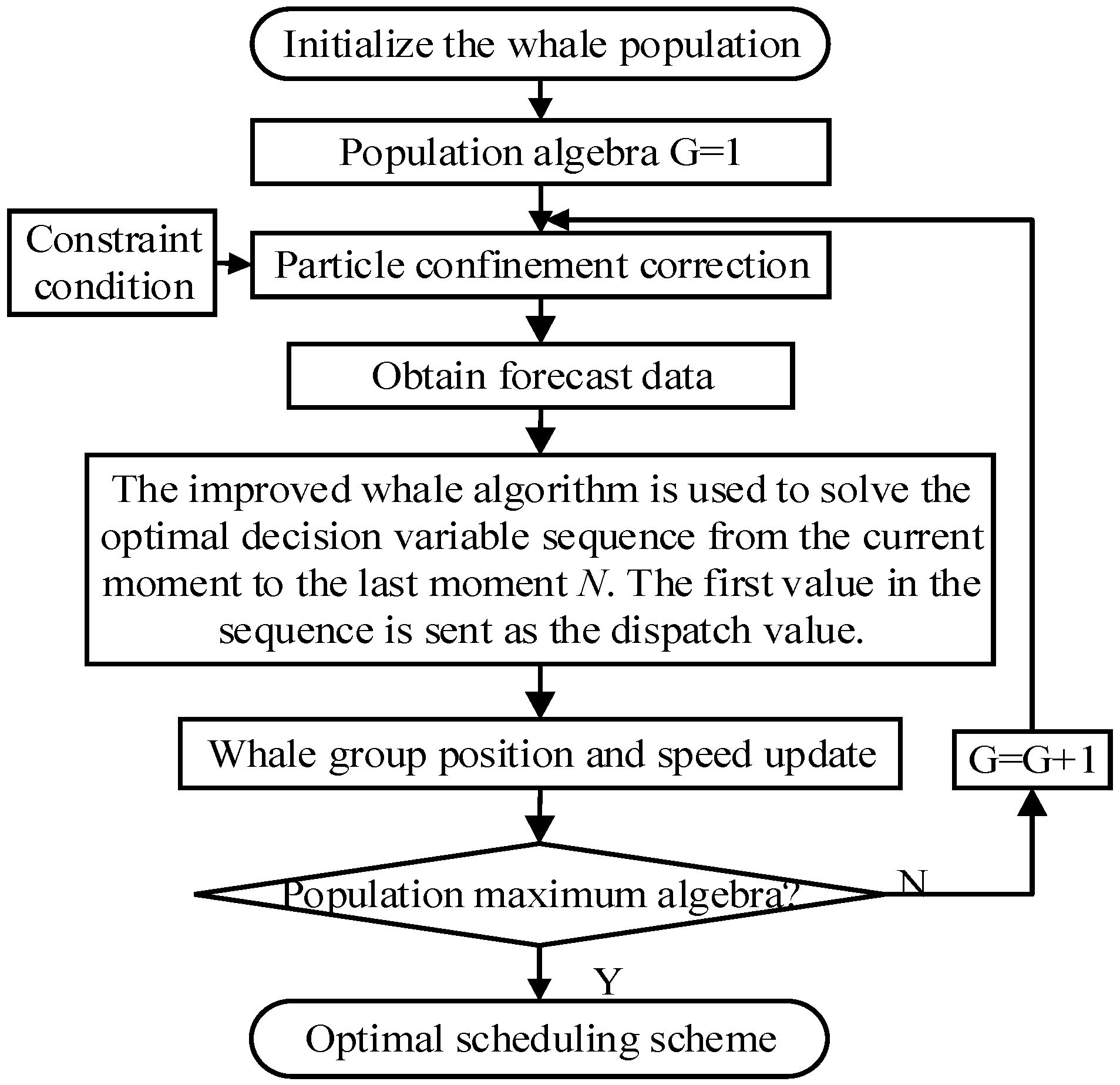
4.4. Model Solving Steps
- (1)
- Parameter initialization: Let the current optimal scheduling time be t = 1 and the optimization interval be 15 min. Obtain the load demand and output value of wind turbine and photovoltaic turbine every 15 min in the next 24 h.
- (2)
- Initialization of whale algorithm: different whale positions and velocities represent different micro-source scheduling plans and adjustment sizes.
- (3)
- Calculate the objective function: The optimization objective is to minimize the frequency deviation from the current moment to the last moment, and the optimal decision variable sequence is shown in Equation (9). And the first value of the sequence in Equation (9) is sent as a scheduling reference value.
- (4)
- Update the SOC value of energy storage, whale position, and speed: The SOC value is updated with the measured load, wind power, and photoelectric output value, and the actual charge/discharge power of the energy storage is fine-tuned. The measured information is used to achieve a closed-loop optimization process and improve the optimization effect.
- (5)
- Iterative update: let t = t + 1, and then, repeat steps (2)–(5) until t = N, to gradually solve the optimal P(t) adjustment value at each moment.
5. Simulation Analysis
5.1. Basis of Simulation
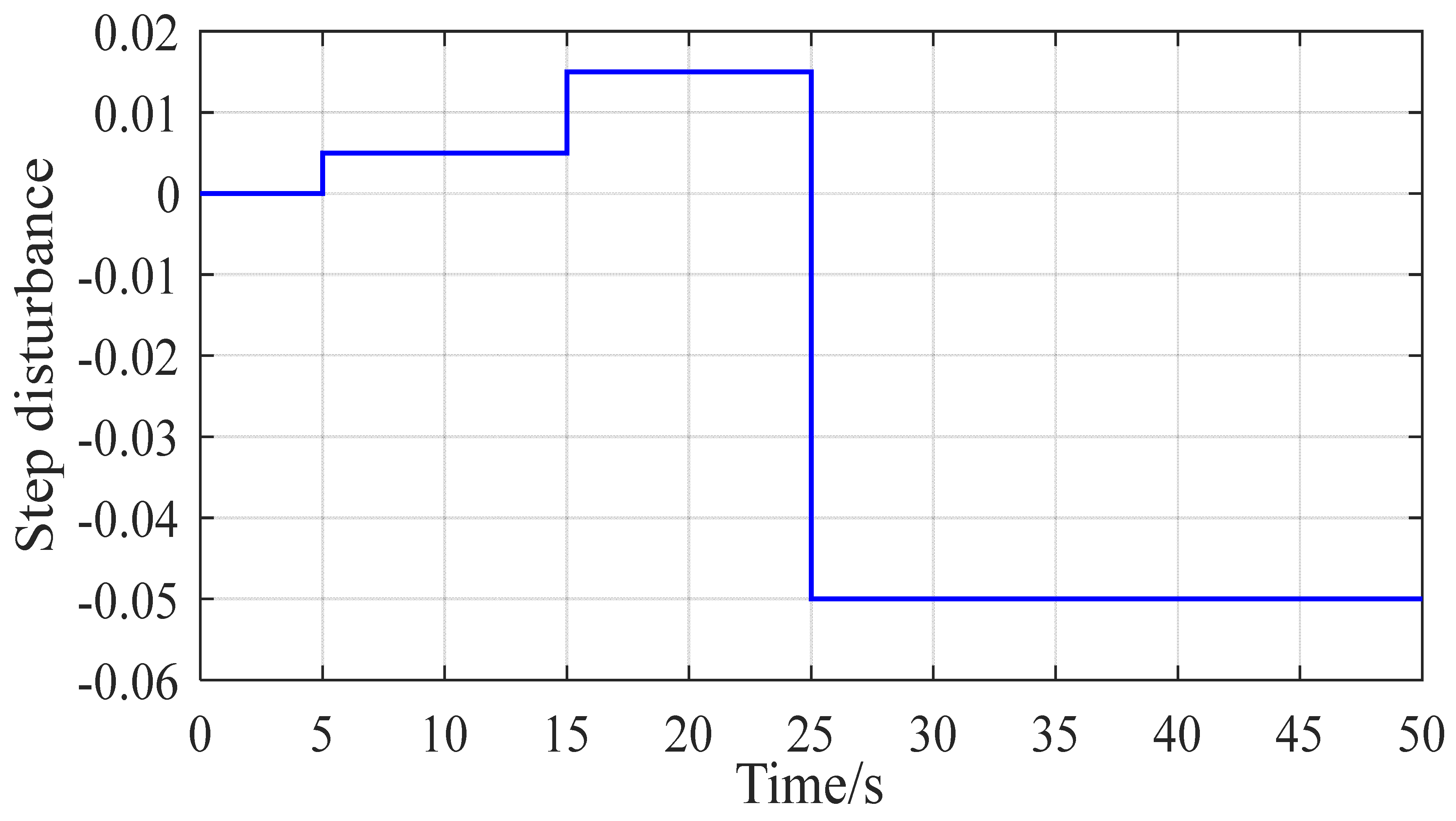
5.2. Short-Time Continuous Step Disturbance Condition Analysis
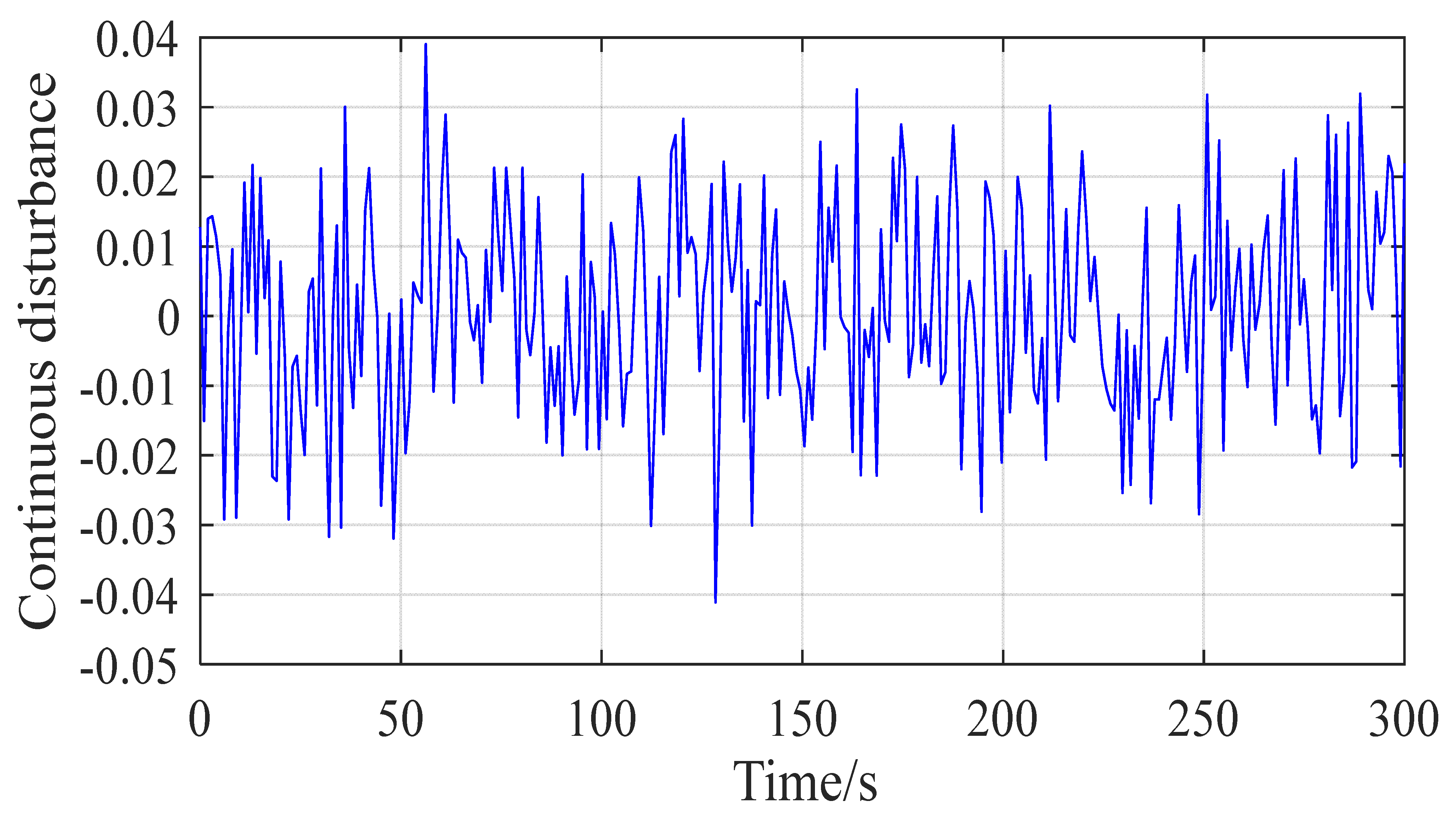
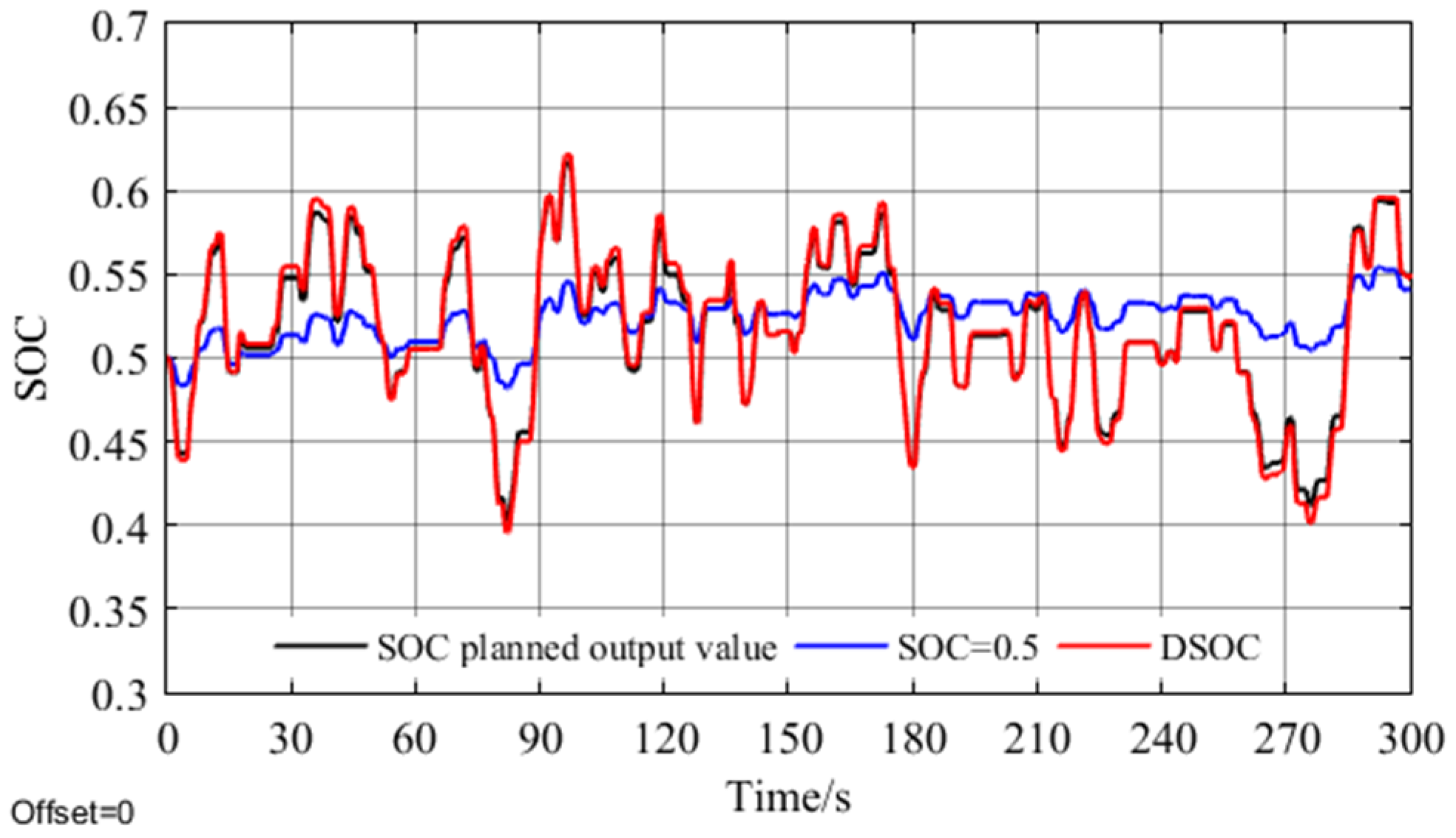
5.3. Continuous Disturbance Condition Analysis
6. Conclusions
- (1)
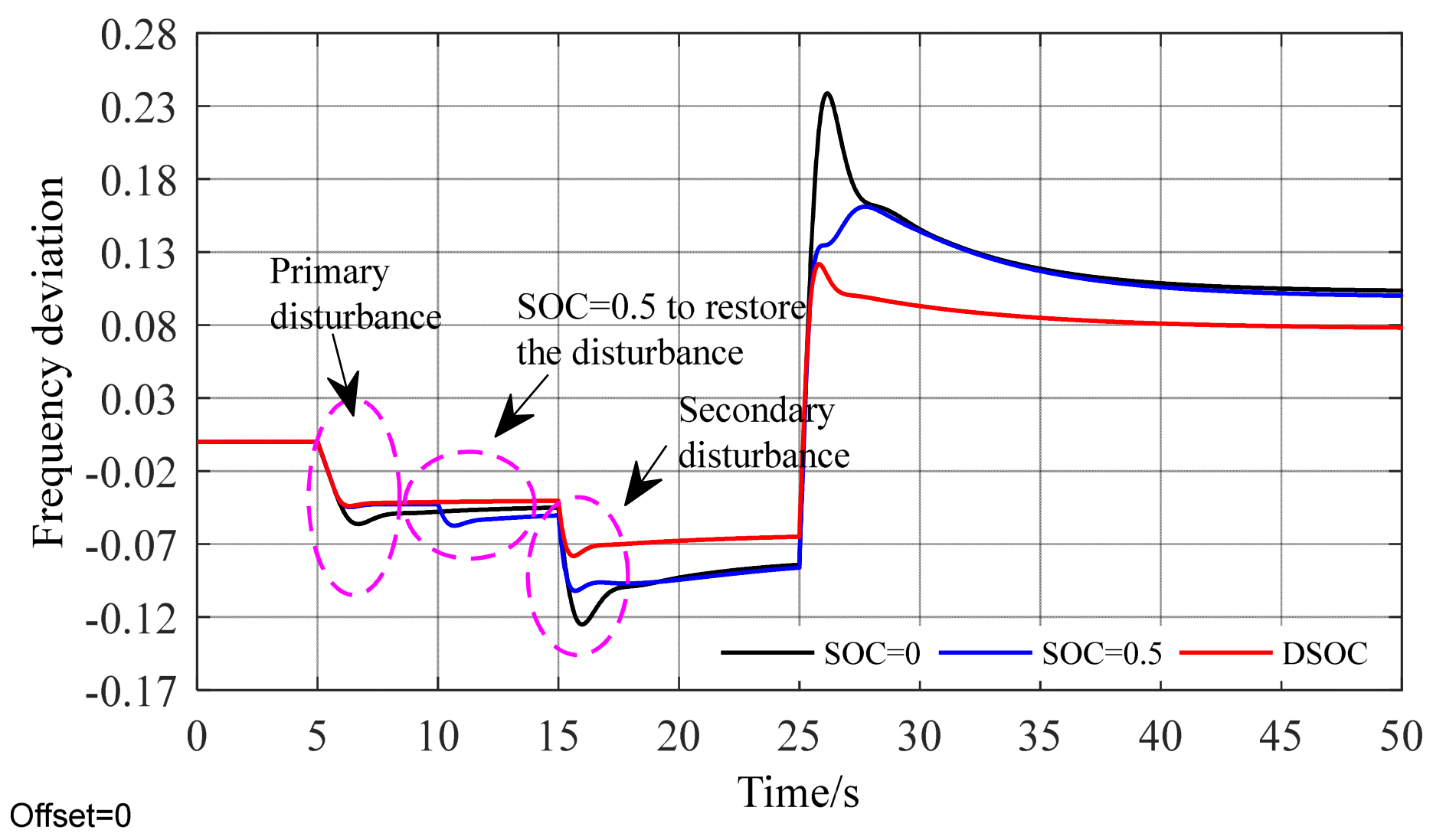
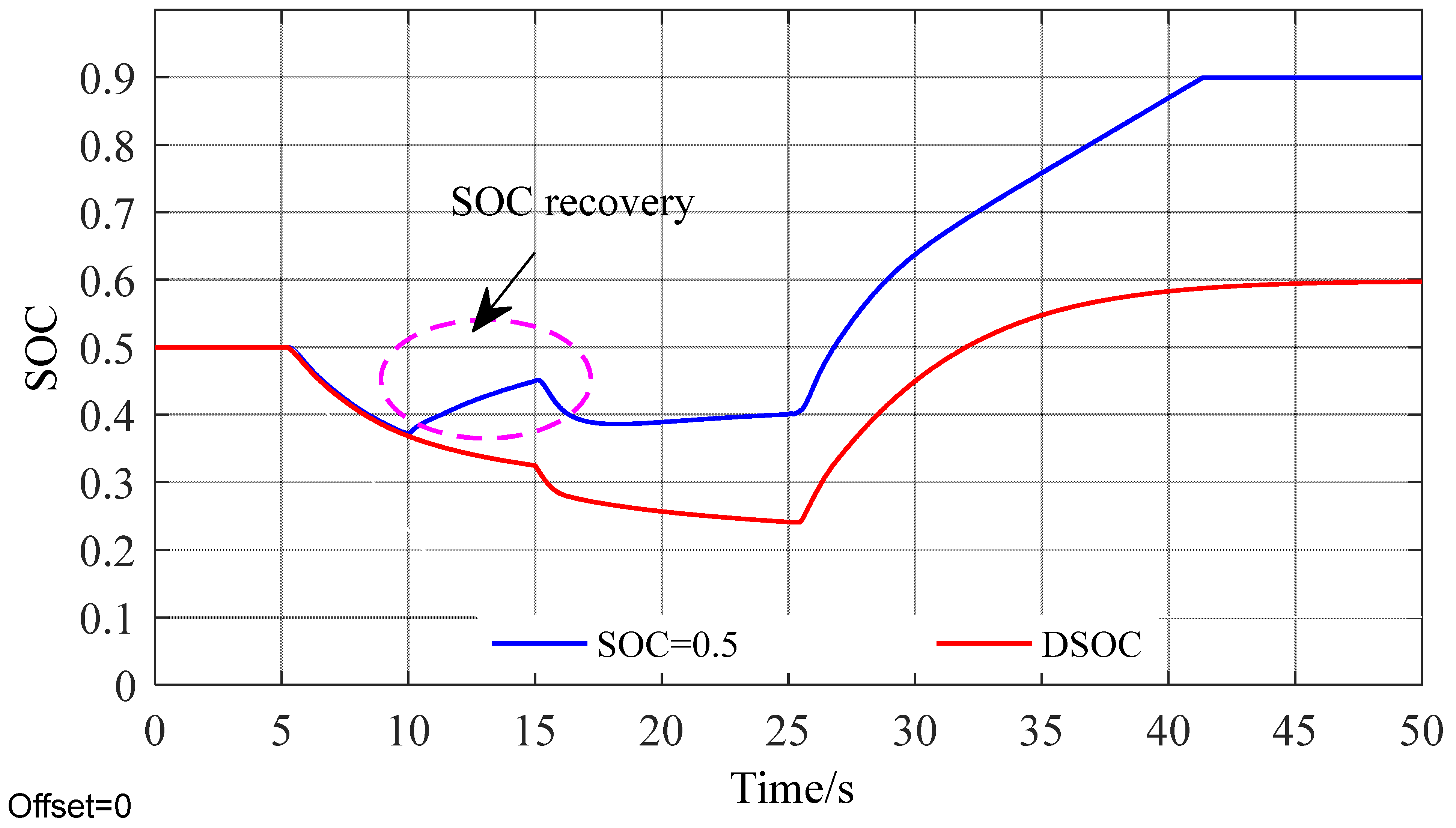
- At 25 s, when a large step disturbance occurs, the SOC value in the constant SOC method is around 0.45, and the energy storage space is limited at this time, resulting in the late SOC saturation state and the withdrawal of frequency modulation, Δfmax =0.1658 Hz, while the DSOC method adopts the SOC base point recovery based on disturbance uncertainty. The SOC base point adaptively adjusts with the wind speed prediction, and the disturbance will increase when 10 s is predicted to be 15 s, but SOC can meet the frequency modulation demand at this time, so no recovery is carried out. However, when a large disturbance is predicted at 25 s for the next time, SOC remains at a low state in order to provide more storage space, and no recovery is required. And Δfmax =0.1203 Hz, increased by 0.0455 Hz, which not only effectively reduces the maximum frequency deviation but also effectively reduces the number of energy storage recovery and the number of energy storage charge and discharge.
- (2)
- Based on the planned SOC value, the SOC offset of the DSOC method is 56.65% smaller than that of the fixed SOC method, and the SOC maintenance effect is the best.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- National Energy Administration. Grid Connected Operation of Wind Power in 2019 [EB/OL]. Available online: http://www.nea.gov.cn/2020-02/28/c_138827910.htm (accessed on 2 February 2020).
- Dai, J.; Tang, Y.; Wang, Q.; Jiang, P. Aggregation frequency response modeling for wind power plants with primary frequency regulation service. IEEE Access 2019, 7, 108561–108570. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Meng, Y.; Chen, C.; Yang, Y. Optimized wavelet packet analysis for photovoltaic wave power suppression. Int. J. Low-Carbon Technol. 2021, 17, 90–96. [Google Scholar] [CrossRef]
- Varma, R.K.; Akbari, M. Simultaneous fast frequency control and power oscillation damping by utilizing PV solar system as PV-STATCOM. IEEE Trans. Sustain. Energy 2020, 1, 415–425. [Google Scholar] [CrossRef]
- Li, C.; Yuan, S. Research on frequency modulation control of photovoltaic power generation system based on VSG. Int. J. Low-Carbon Technol. 2021, 16, 287–293. [Google Scholar] [CrossRef]
- Mejía-Giraldo, D.; Velásquez-Gomez, G.; Muñoz-Galeano, N.; Cano-Quintero, J.B.; Lemos-Cano, S. A BESS sizing strategy for primary frequency regulation support of solar photovoltaic plants. Energies 2019, 12, 317. [Google Scholar] [CrossRef]
- Ramírez, M.; Castellanos, R.; Calderón, G.; Malik, O. Placement and sizing of battery energy storage for primary frequency control in an isolated section of the Mexican power system. Electr. Power Syst. Res. 2018, 160, 142–150. [Google Scholar] [CrossRef]
- Safety Conditions and Evaluation Specification for Grid Connection of Wind Farms. (Office Safety [2011] No. 79).pdf (nea.gov.cn). Available online: https://www.doc88.com/p-58273787494017.html (accessed on 19 May 2024).
- Baidu.com. Technical Regulations and Test Guidelines for Primary Frequency Modulation of Grid-Connected Power Supply(GB/T40595-2021) EB/OL]. Available online: https://power.in-en.com/html/power-2400846.shtml (accessed on 1 May 2022).
- Parsons, B.; Milligan, M.; Zavadil, B. Grid impacts of wind power: A summary of recent studies in the United States. Wind Energy 2014, 7, 87–108. [Google Scholar] [CrossRef]
- Liu, Y.; Du, W.; Xiao, L.; Wang, H.; Bu, S. Sizing Energy Storage Based on a Life-Cycle Saving Dispatch Strategy to Support Frequency Stability of an Isolated System with Wind Farms. IEEE Access 2019, 7, 166329–166336. [Google Scholar] [CrossRef]
- Akram, U.; Mithulananthan, N.; Raza, M.Q.; Shah, R.; Milano, F. RoCoF Restrictive Planning Framework and Wind Speed Forecast Informed Operation Strategy of Energy Storage System. IEEE Trans. Power Syst. 2021, 36, 224–234. [Google Scholar] [CrossRef]
- Chen, C.; Li, X.; Liu, X.; Yang, Y. Reliability improvement of wind power frequency modulation based on look-ahead control strategy and stage of charge optimization of energy storage. Int. J. Energy Res. 2022, 46, 4739–4753. [Google Scholar]
- Tan, J.; Zhang, Y. Coordinated control strategy of a battery energy storage system to support a wind power plant providing multi-timescale frequency ancillary services. IEEE Trans. Sustain. Energy 2017, 8, 1140–1153. [Google Scholar] [CrossRef]
- Xu, Q.; Xiao, J.; Hu, X.; Wang, P.; Lee, M.Y. A decentralized power management strategy for hybrid energy storage system with autonomous bus voltage restoration and state of charge recovery. IEEE Trans. Ind. Electron. 2017, 64, 7098–7108. [Google Scholar] [CrossRef]
- Zhang, D.; Li, J.; Liu, X.; Guo, J.; Xu, S. A stochastic optimization method for energy storage sizing based on an expected value model. Energies 2019, 12, 702. [Google Scholar] [CrossRef]
- Chen, C.; Wang, Y.; Zhou, K.; Huang, Z. Frequency regulation optimization for wind storage based on frequency regulation reliability and state of charge in isolated island off-grid. Energy Sci. Eng. 2023, 11, 192–205. [Google Scholar] [CrossRef]
- Dang, J.; Seuss, J.; Suneja, L.; Harley, R.G. SOC feedback control for wind and ESS hybrid power system frequency regulation. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 79–86. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, D.W.; Zhang, H.; Yan, S.; Wang, X. Coordinated control strategy of battery energy storage system and PMSG-WTG to enhance system frequency regulation capability. IEEE Trans. Sustain. Energy 2017, 8, 1330–1343. [Google Scholar] [CrossRef]
- Hang, Y.; Guo, J. Research on scientific data mining algorithms based on WOA-BP neural networks. In Proceedings of the 2023 3rd International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 6–8 June 2023; pp. 667–672. [Google Scholar]
- Jitkongchuen, D.; Sirikayon, C.; Thummano, A. An Adaptive Whale Optimization Algorithm with Mahalanobis Distance for Optimization Problems. In Proceedings of the 2022 Joint International Conference on Digital Arts, Media and Technology with ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI DAMT & NCON), Chiang Rai, Thailand, 26–28 January 2022; pp. 285–289. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| WESN (MWh) | 0.5 | D (p.u.) | 1 |
| EN (MW) | 1 | H (s) | 5 |
| KG (p.u.) | 20 | FHP (p.u.) | 0.5 |
| TG (s) | 0.08 | Kmax (p.u.) | 24 |
| TCH (s) | 0.3 | TES (s) | 0.01 |
| TRH (s) | 10 | TWT (s) | 0.01 |
| SOCmax | 0.9 | SOCmin | 0.1 |
| Index (Hz) | Time of Disturbance | Frequency Modulation Method | ||
|---|---|---|---|---|
| SOC = 0 | SOC = 0.5 | DSOC | ||
| Δfmax | 5 s | −0.0561 | −0.0451 | −0.0446 |
| 15 s | −0.1252 | −0.1022 | −0.0775 | |
| 25 s | 0.2338 | 0.1658 | 0.1203 | |
| Index | Frequency Modulation Method | ||
|---|---|---|---|
| SOC = 0 | SOC = 0.5 | DSOC | |
| Rf | 0.115 | 0.591 | 0.365 |
| Rsoc | - | 0.203 | 0.088 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Li, L. Frequency Regulation Adaptive Control Strategy of Wind Energy Storage System for Wind Speed Uncertainty. Energies 2024, 17, 2523. https://doi.org/10.3390/en17112523
Chen C, Li L. Frequency Regulation Adaptive Control Strategy of Wind Energy Storage System for Wind Speed Uncertainty. Energies. 2024; 17(11):2523. https://doi.org/10.3390/en17112523
Chicago/Turabian StyleChen, Changqing, and Lixiong Li. 2024. "Frequency Regulation Adaptive Control Strategy of Wind Energy Storage System for Wind Speed Uncertainty" Energies 17, no. 11: 2523. https://doi.org/10.3390/en17112523