
Inertial Energy Storage Integration with Wind Power Generation Using Transgenerator–Flywheel Technology


Abstract
:1. Introduction
- (1)
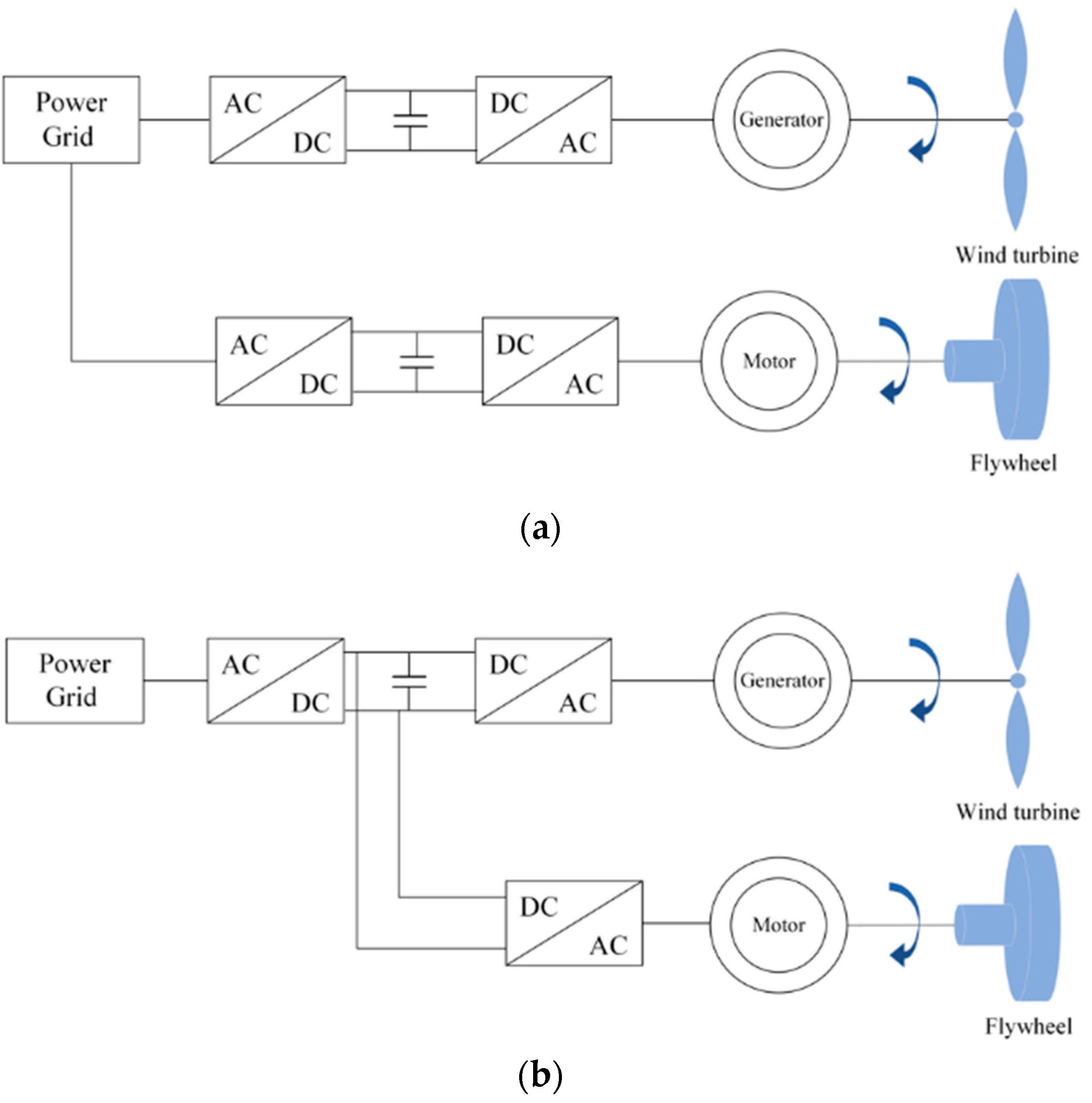
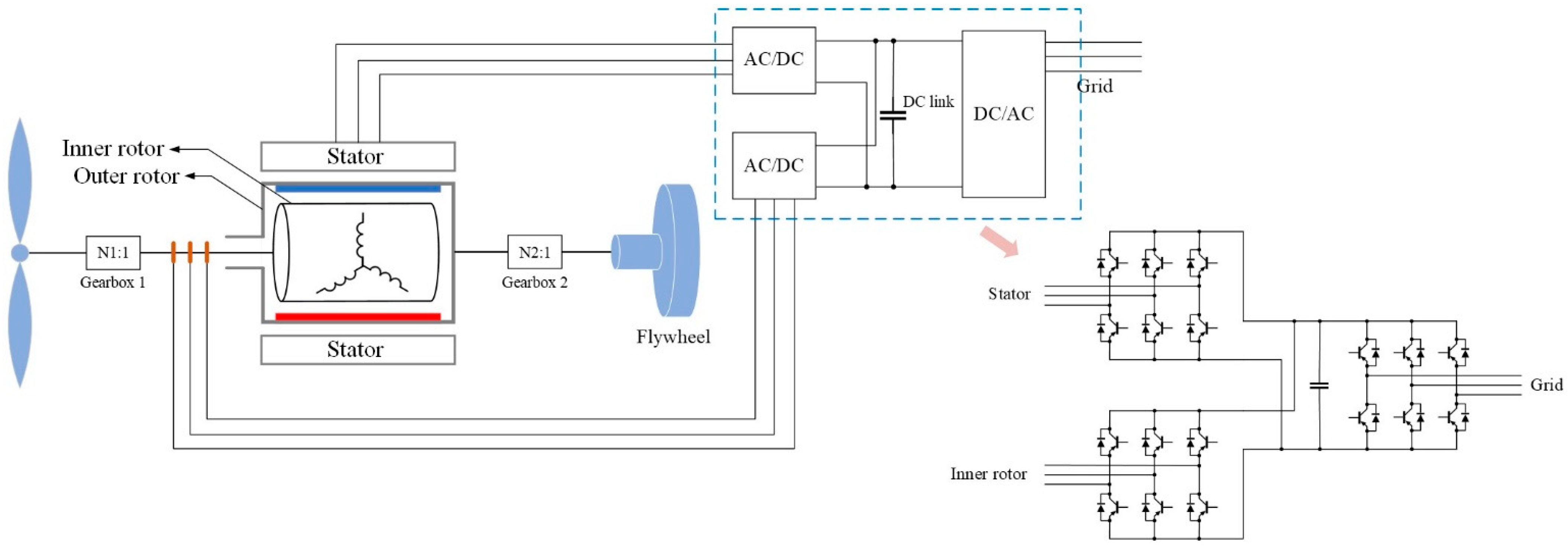
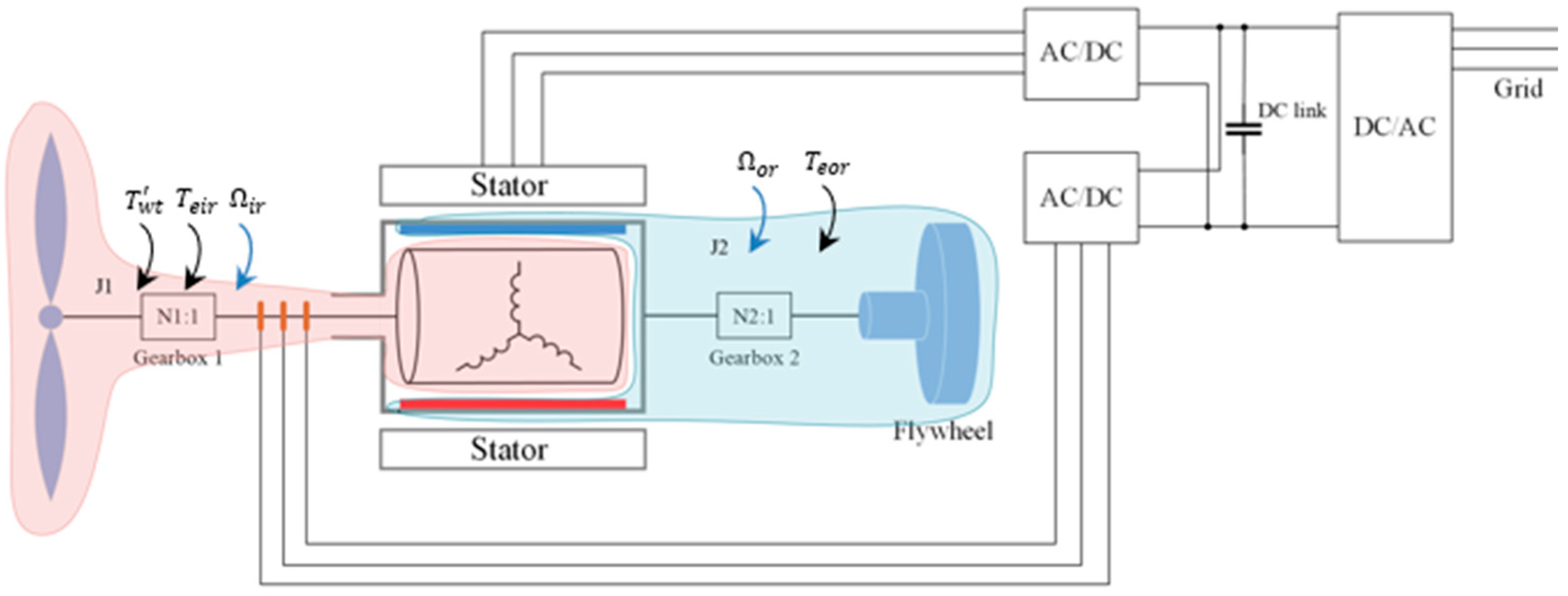
- Compactness: The proposed configuration integrates the wind turbine and flywheel in one system, eliminating the drive motor and converters, making it possible to fit it into a turbine nacelle.
- (2)
- Efficiency: The connection between the wind turbine and the flywheel, using the proposed configuration, creates a shorter path with fewer electrical components for power transfer, which reduces the total power losses and thus increases the overall power efficiency.
- (3)
- Scalability: This configuration ensures one transgenerator is equipped with one flywheel in the wind turbine. The one-to-one feature enables a wind farm to achieve substantial energy storage when the wind turbine number is significant.
- (4)
- Distribution: The one-to-one feature ensures flywheels are as distributed as the wind turbine units. This feature becomes more evident in a wind-based distributed generation (DG) system.
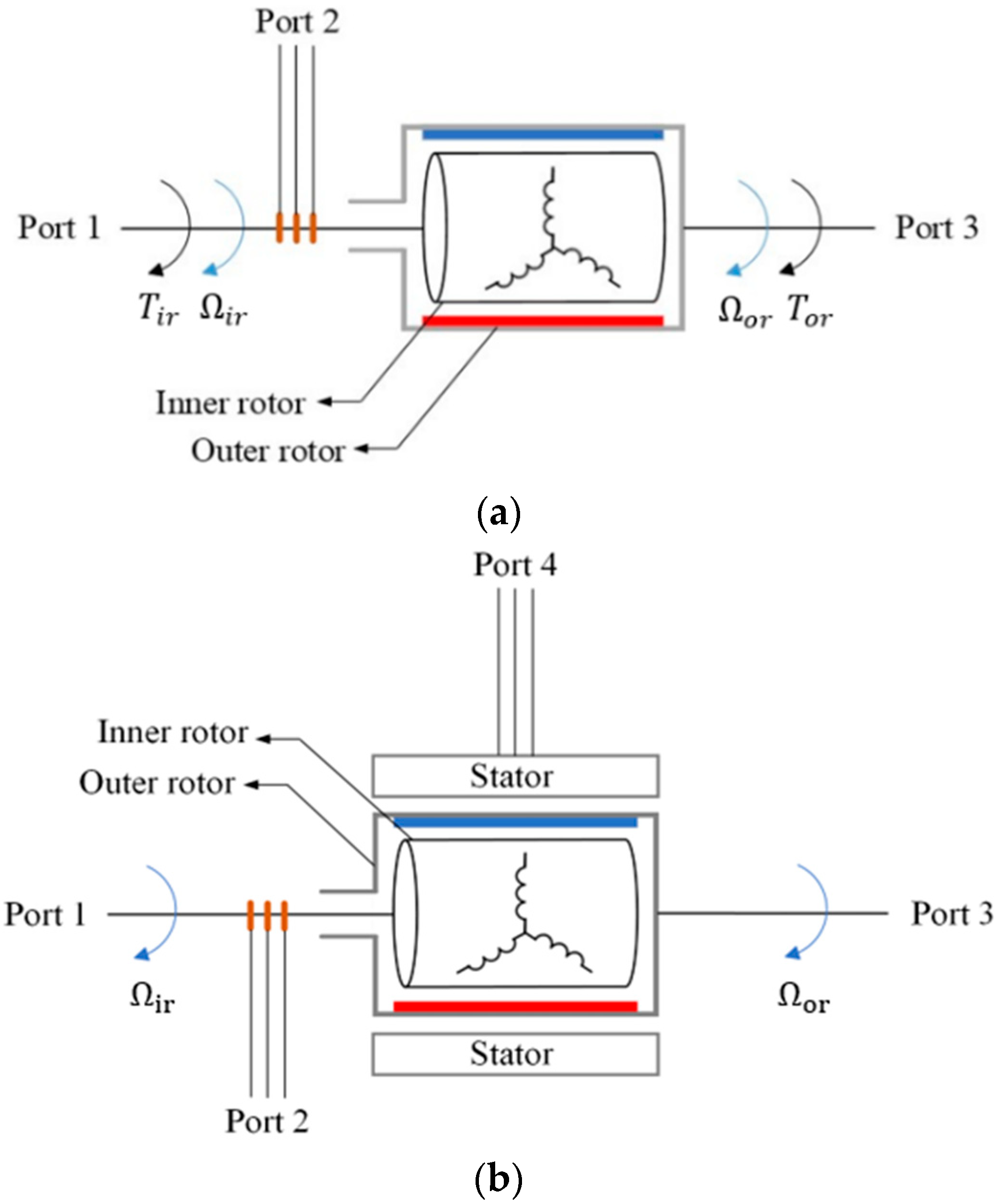
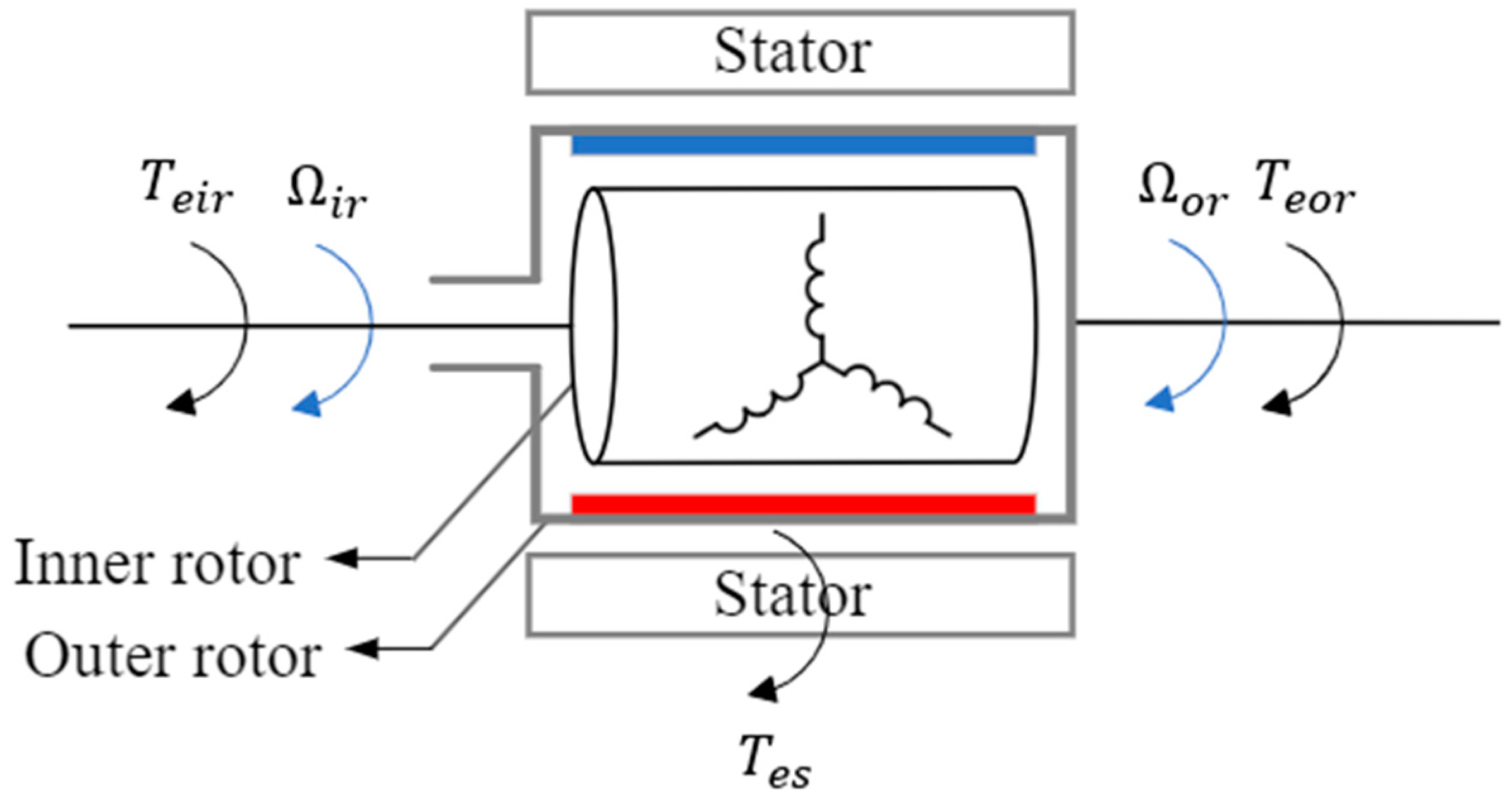
2. Three-Member Transgenerator
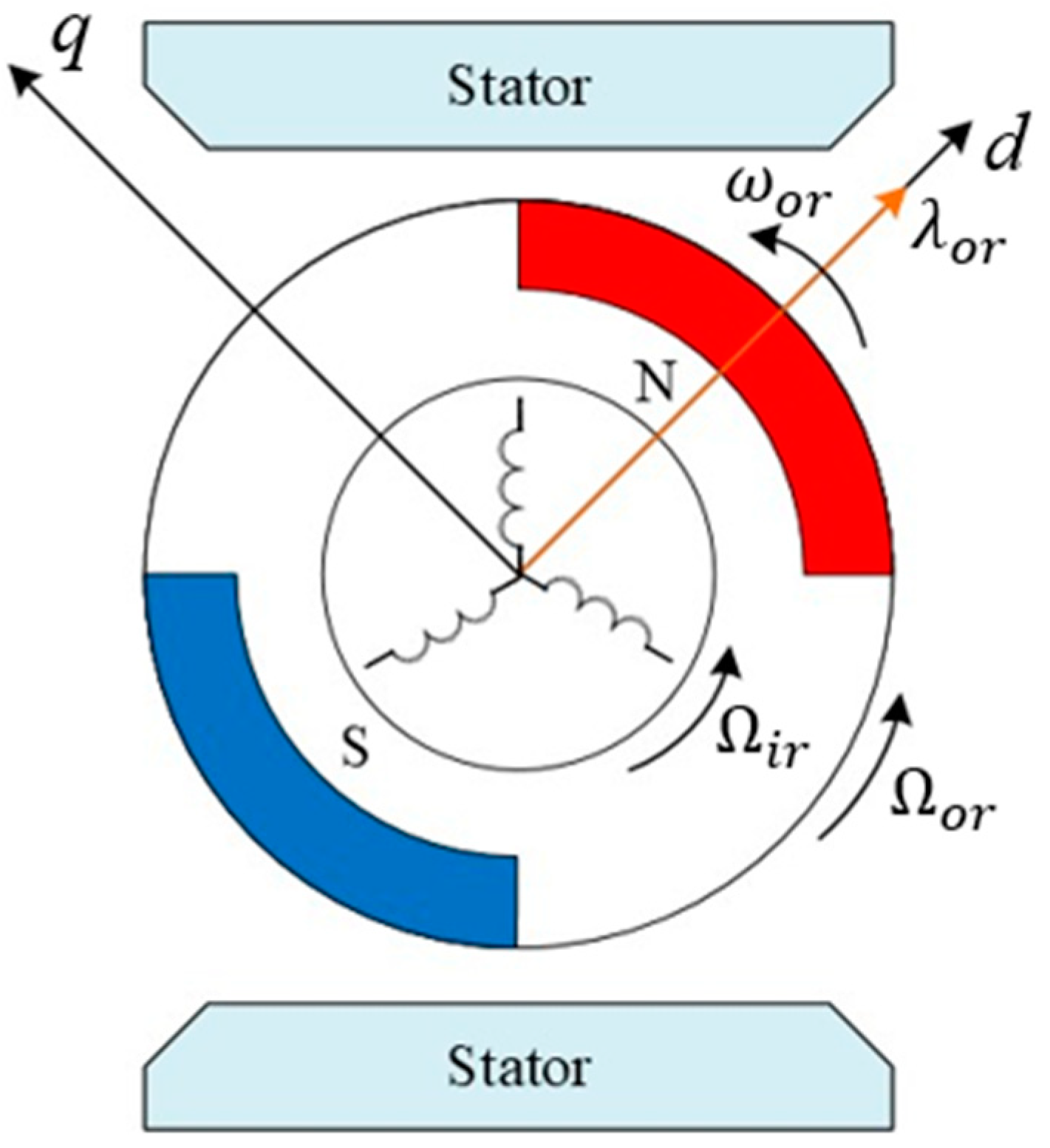
2.1. Mathematical Model
2.1.1. Flux Linkage and Voltage Equations
2.1.2. Power and Torque Equations
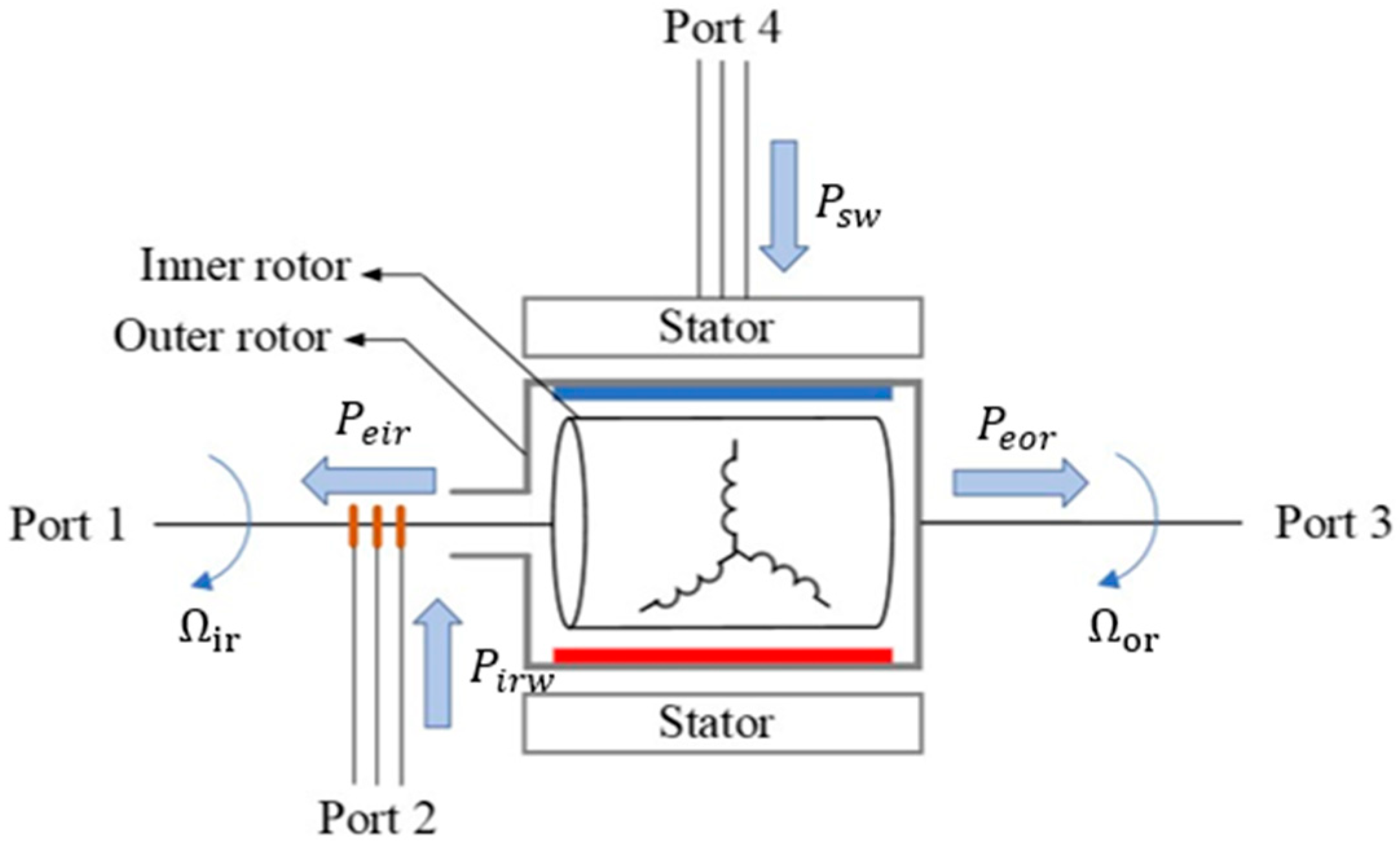
2.2. Power Flow
- (1)
- The electrical power received by the machine, , equals the mechanical power delivered by the machine, , at each moment.
- (2)
- When , the machine receives electrical power and delivers mechanical power; the machine operates as a transmotor.
- (3)
- When , the machine delivers electrical power and receives mechanical power; the machine operates as a transgenerator.
3. Flywheel
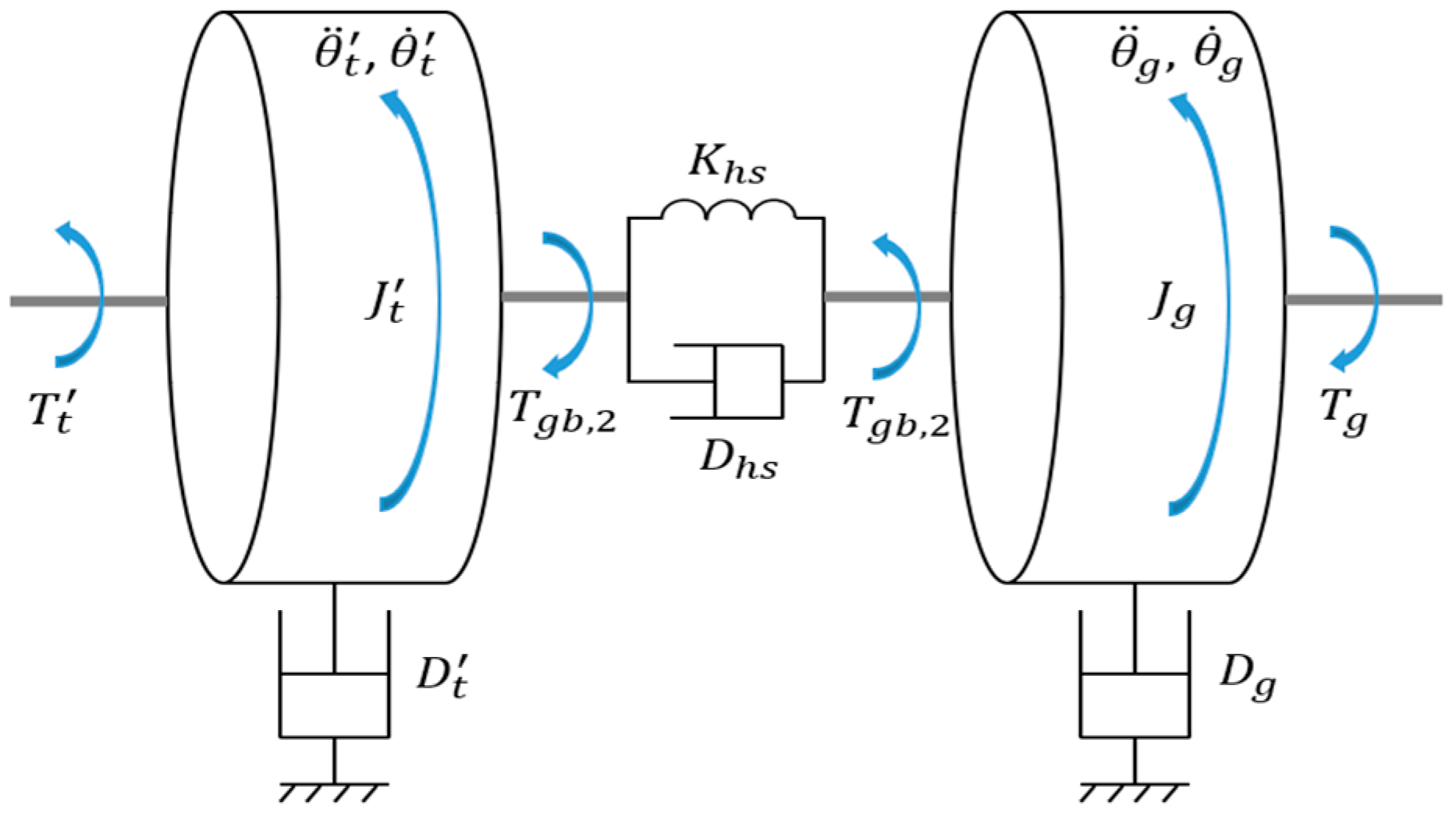
3.1. Mechanical System Overview
- (1)
- The total inertia of each system equals the sum inertia of each component referred to the rotor sides; the total inertia of system 1 and system 2 are and , respectively.
- (2)
- The rotational speed of system 1 is consistent with the inner rotor’s angular velocity, ; the speed of system 2 is consistent with the outer rotor’s angular velocity, .
- (3)
- The torques on system 1 include torque on the wind turbine referred to the inner rotor side, , and the electromagnetic torque on the inner rotor, ; the torque on system 2 is the electromagnetic torque on the outer rotor, .
3.2. Flywheel Charging Power and Storage Energy
3.3. Flywheel Power Management Strategies
- (1)
- Due to the acceleration, the speed change in the flywheel cannot be furnished immediately, delaying the power response to the demand. Therefore, changing the outer rotor torque is a better strategy.
- (2)
- To ensure the accuracy of the power control by controlling the outer rotor torque, the speed should change slightly, which requires the flywheel inertia referred to the outer rotor side to be significant.
- (3)
- Before the flywheel power management process, the flywheel should be accelerated to a state of charge (SOC) to ensure that the flywheel can release enough energy during emergencies. Additionally, there should be a margin with the maximum storage to leave enough space for charging. The preset flywheel SOC in this paper is 80%, and then the flywheel speed will fluctuate (slightly, most of the time) at around 80% SOC, as shown in Figure 10.
- (4)
- The performance of the flywheel power response depends on the performance of the outer rotor torque control, which will be introduced later.
3.4. Flywheel Selection
3.4.1. Shape
3.4.2. Material
4. Control System
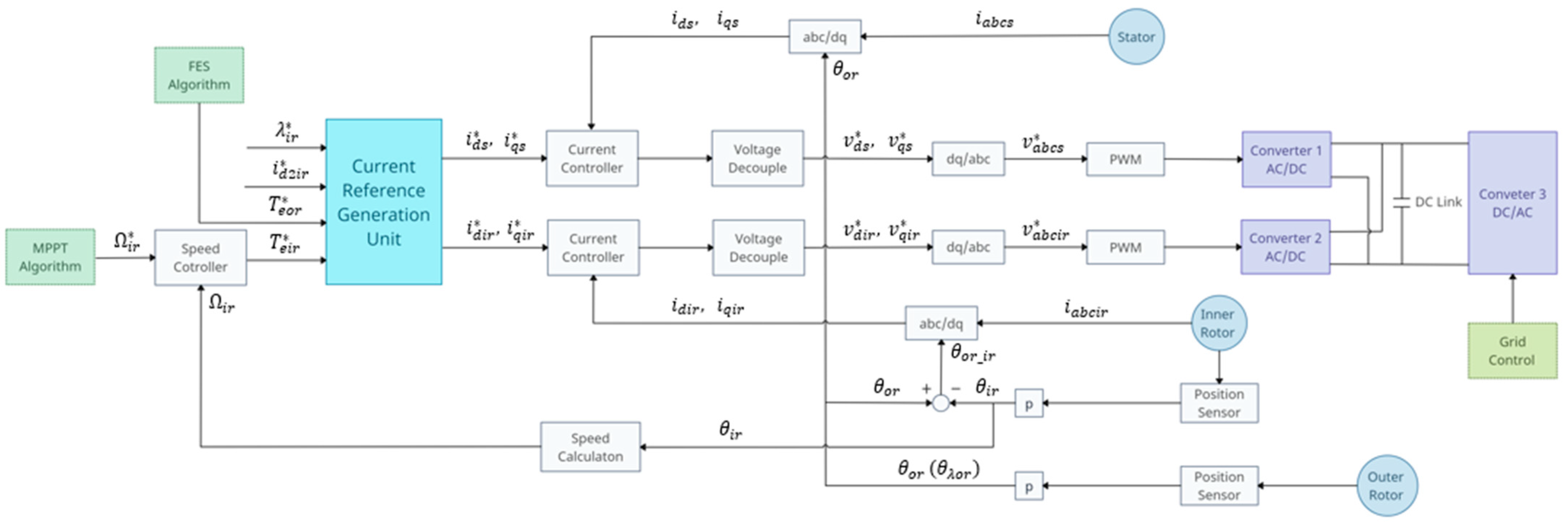
4.1. Rotor-Side Control
4.1.1. Inner Rotor Speed Control
4.1.2. Outer Rotor Torque Control
4.1.3. Rotor-Side Control Diagram
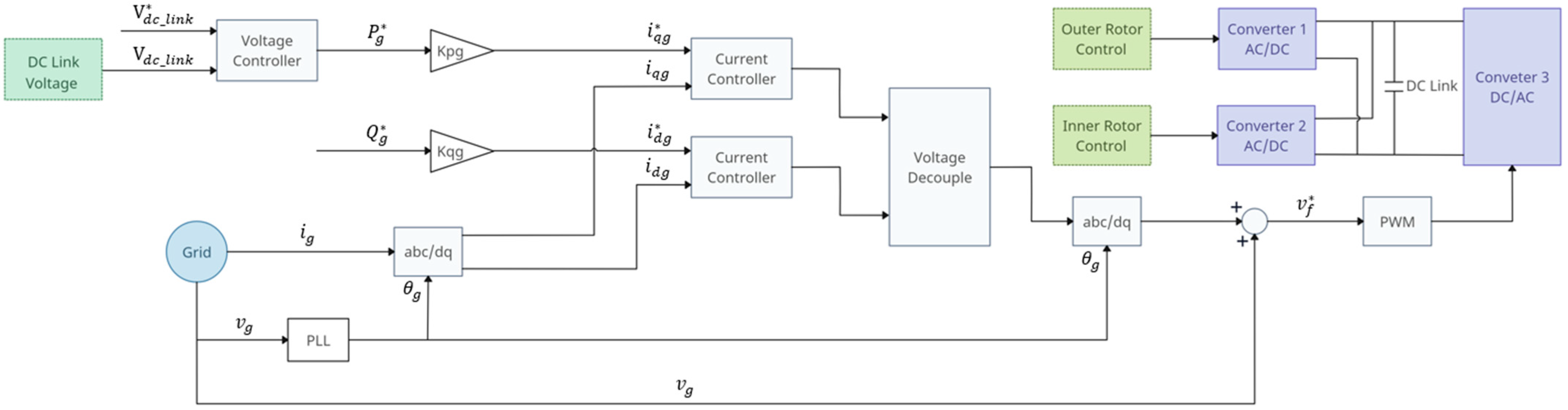
4.2. Grid-Side Control
5. Simulation and Verification
5.1. Simulink Modeling
5.2. Control System Verification
5.2.1. Set Up
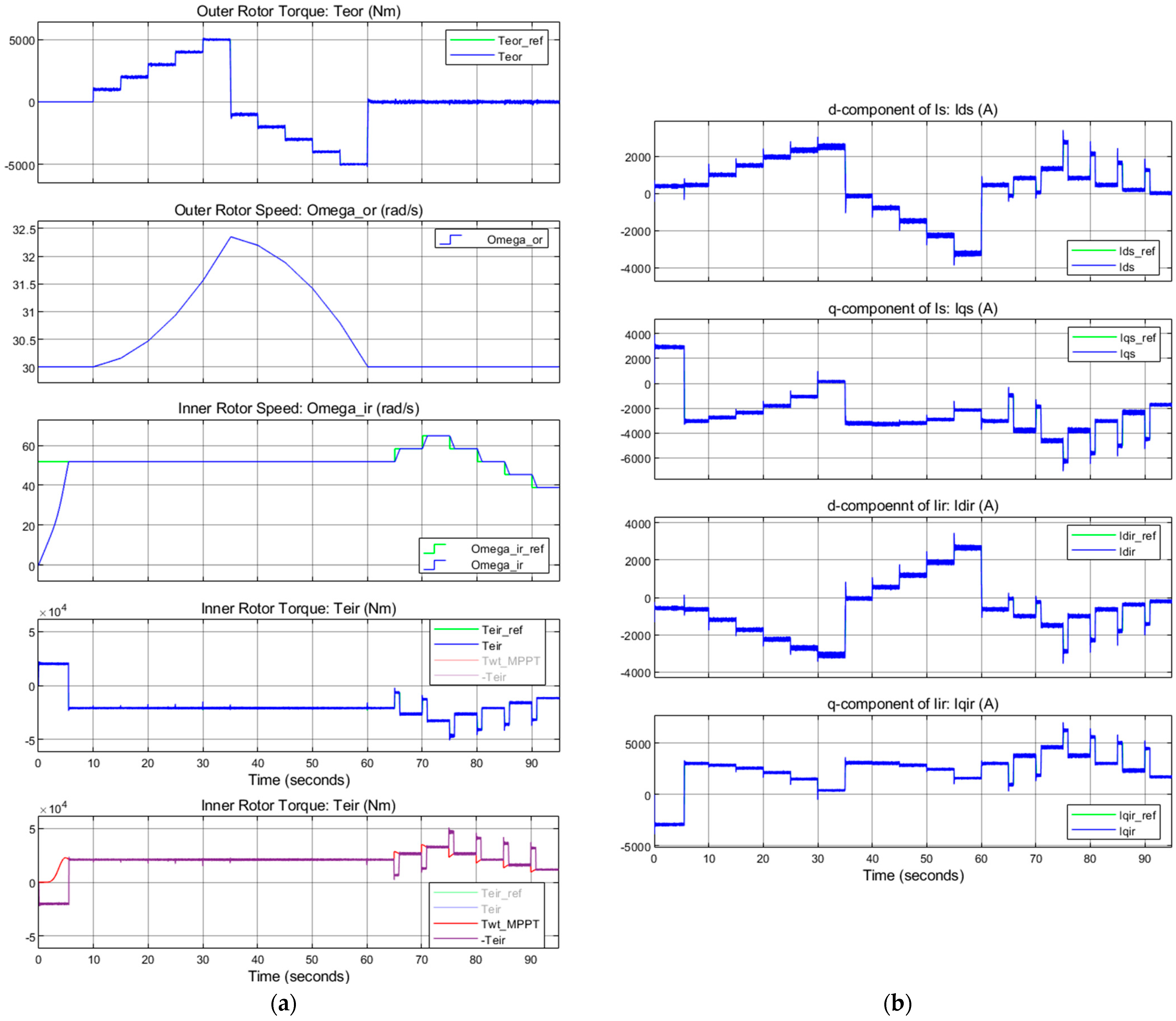
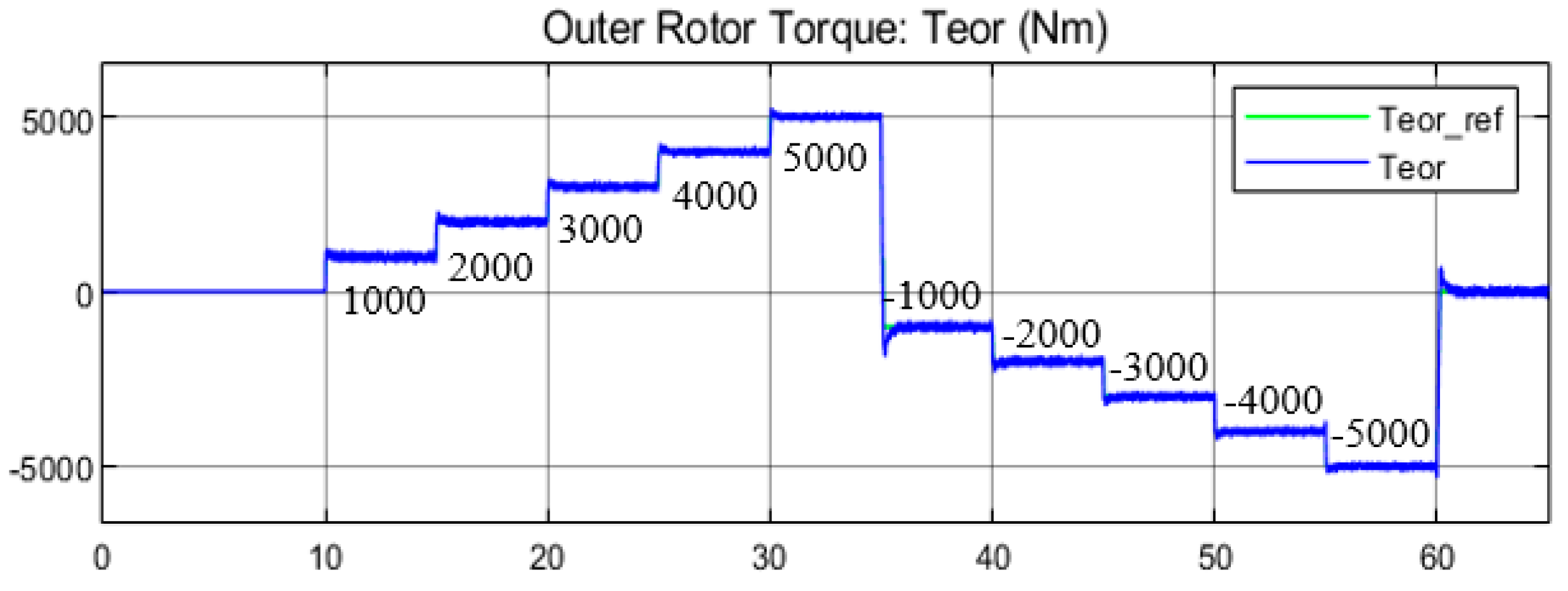
- Outer rotor torque control
- (1)
- 0–10 s: The inner rotor accelerates to a constant speed, and the outer rotor torque is set to zero (turbine start-up). The initial speed of the outer rotor is 30 rad/s.
- (2)
- 10–65 s: The outer rotor torque reference is set every 5 s, and the values are 1000 N·m, 2000 N·m, 3000 N·m, 4000 N·m, 5000 N·m −1000 N·m, −2000 N·m, −3000 N·m, −4000 N·m, −5000 N·m, and 0.
- Inner rotor speed control
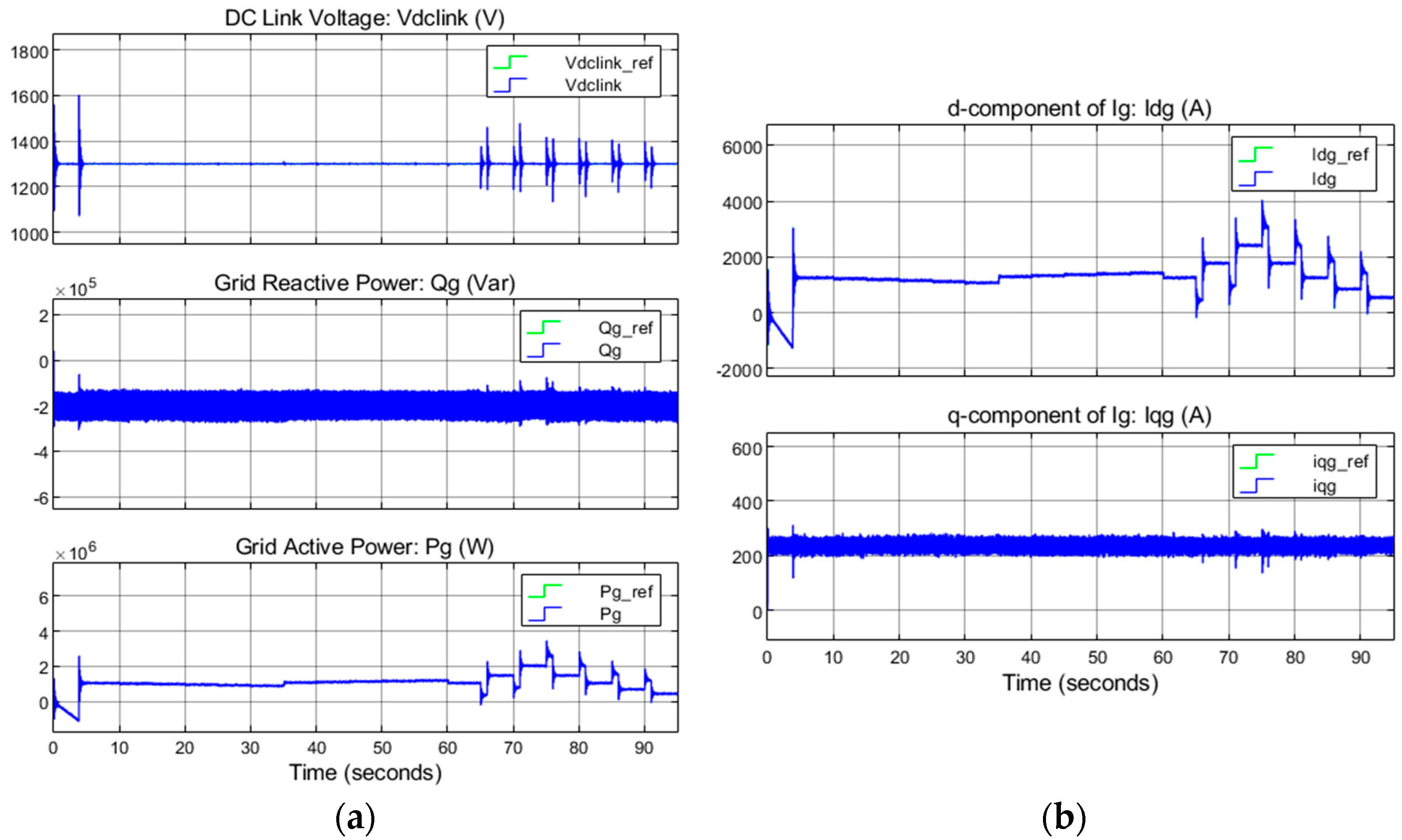
- Grid-side control
5.2.2. Results
- Outer rotor torque control
- Inner rotor speed control
- Three-phase currents and voltage on the rotor side
- Grid-side control
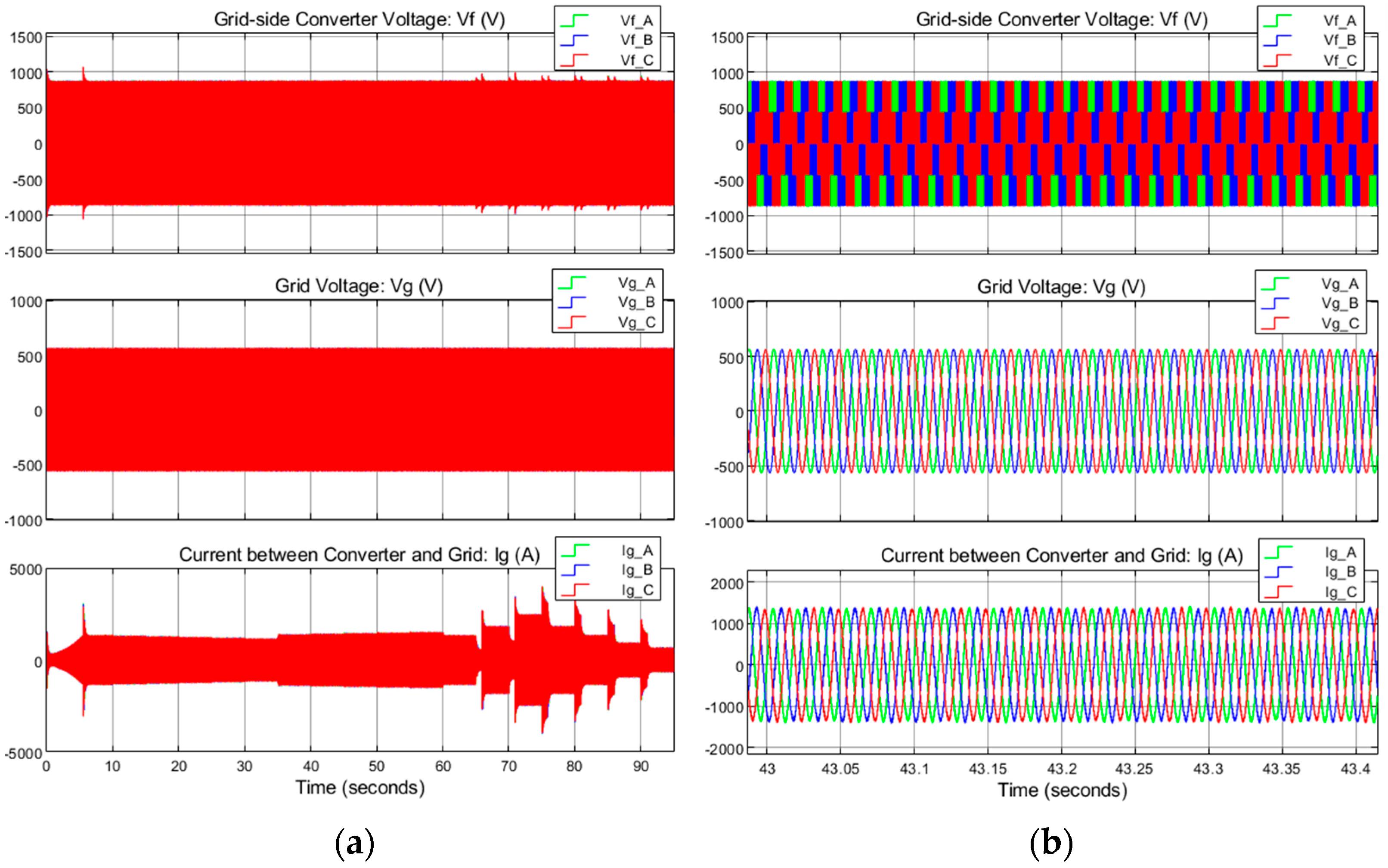
- Three-phase current and voltage on the grid side
5.3. Flywheel Performance Evaluation
5.3.1. Set Up
5.3.2. Results
- (1)
- 0–10 s: after the inner rotor start-up process, the power generated by the wind turbine is 1.09 MW, as shown in the first plot of Figure 22; the power delivered by the inner rotor is −1.08 MW, meaning the inner rotor receives 1.08 MW of power from the wind turbine, as shown in the second plot in Figure 22.
- (2)
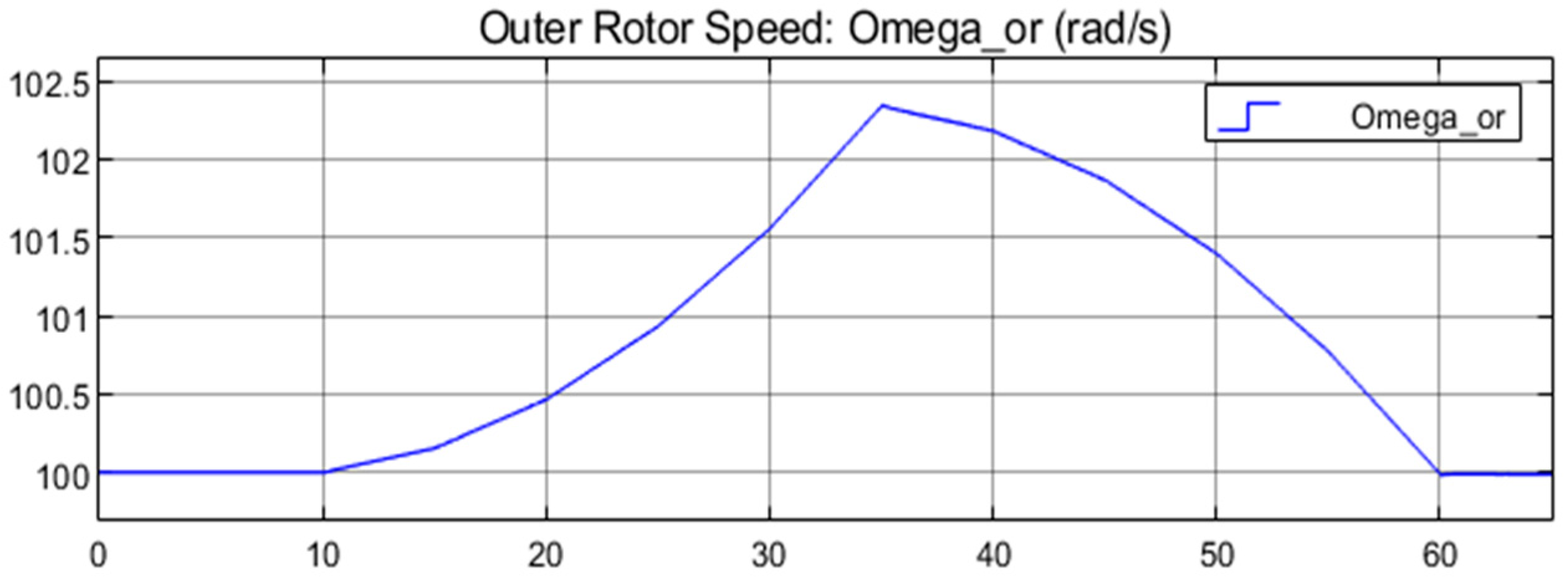
- 10–35 s: the outer rotor accelerates (flywheel) in a series of increasing positive accelerations, and the flywheel is charged, as shown in the third plot in Figure 22.
- (3)
- 35–60 s: the outer rotor (flywheel) decelerates in a series of increasing negative accelerations, and the flywheel is discharged, as shown in the third plot in Figure 22.
- (4)
- 60–65 s: the acceleration of the outer rotor is 0, and the flywheel is neither charged nor discharged, as shown in the third plot in Figure 22.
- (5)
- 10–65 s: the total electrical power received by the transgenerator is negative (the power generated by the transgenerator is positive), and it changes with the flywheel charging power in real time, as shown in the fourth plot in Figure 22.
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tsao, Y.-C.; Vu, T.-L. Distributed energy storage system planning in relation to renewable energy investment. Renew. Energy 2023, 218, 119271. [Google Scholar] [CrossRef]
- Frischmann, C.; Gouveia, J.P.; Horowitz, A. Distributed Energy Storage @ Projectdrawdown #Climatesolutions. Project Drawdown. Available online: https://drawdown.org/solutions/distributed-energy-storage (accessed on 6 March 2024).
- Fitton, K. Storing Renewable Electricity on the Grid of the Future (Updated for 2023). Medium. Available online: https://medium.com/@kitfitton/storing-renewable-electricity-on-the-grid-of-the-future-updated-for-2023-1816484dc9cd (accessed on 6 March 2024).
- Gao, D.W. Basic Concepts and Control Architecture of Microgrids. In Energy Storage for Sustainable Microgrid; University of Denver: Denver, CO, USA, 2015; pp. 1–34. [Google Scholar]
- Suvire, G.O.; Molina, M.G.; Mercado, P.E. Improving the Integration of Wind Power Generation into AC Microgrids Using Flywheel Energy Storage. IEEE Trans. Smart Grid 2012, 3, 1945–1954. [Google Scholar] [CrossRef]
- Mir, A.S.; Senroy, N. Intelligently Controlled Flywheel Storage for Enhanced Dynamic Performance. IEEE Trans. Sustain. Energy 2018, 10, 2163–2173. [Google Scholar] [CrossRef]
- Nair, S.G.; Senroy, N. Wind turbine with flywheel for improved power smoothening and LVRT. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Díaz-González, F.; Sumper, A.; Gomis-Bellmunt, O.; Bianchi, F.D. Energy management of flywheel-based energy storage device for wind power smoothing. Appl. Energy 2013, 110, 207–219. [Google Scholar] [CrossRef]
- Li, X.; Palazzolo, A. A review of flywheel energy storage systems: State of the art and opportunities. J. Energy Storage 2021, 46, 103576. [Google Scholar] [CrossRef]
- Molina, M.G. Distributed Energy Storage Systems for Applications in Future Smart Grids. In Proceedings of the 2012 Sixth IEEE/PES Transmission and Distribution: Latin America Conference and Exposition (T&D-LA), Montevideo, Uruguay, 3–5 September 2012. [Google Scholar]
- Flywheel Energy Storage. Wikipedia. Available online: https://en.wikipedia.org/wiki/Flywheel_energy storage (accessed on 15 May 2024).
- Mousavi, G.S.M.; Faraji, F.; Majazi, A.; Al-Haddad, K. A comprehensive review of Flywheel Energy Storage System technology. Renew. Sustain. Energy Rev. 2017, 67, 477–490. [Google Scholar] [CrossRef]
- Sodhi, S. Electromagnetic Gearing Applications in Hybrid-Electric Vehicles. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 1994. [Google Scholar]
- Xu, L. A New Breed of Electric Machines - Basic Analysis and Applications of Dual Mechanical Port Electric Machines. J. Electr. Eng. Technol. 2006, 1, 73–79. [Google Scholar] [CrossRef]
- Cai, H.; Xu, L. Modeling and Control for Cage Rotor Dual Mechanical Port Electric Machine–Part I: Model Development. IEEE Trans. Energy Convers. 2015, 30, 957–965. [Google Scholar] [CrossRef]
- He, R.; Li, J. Optimized design and performance analysis of a magnetic-field modulated brushless dual-mechanical port motor with Halbach array permanent magnets. Adv. Mech. Eng. 2020, 12, 1–12. [Google Scholar] [CrossRef]
- Chen, H.; El-Refaie, A.M.; Zuo, Y.; Cai, S.; Cao, L.; Lee, C.H.T. Comparative Study and Design Optimization of a Dual-Mechanical-Port Electric Machine for Hybrid Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2022, 71, 8341–8353. [Google Scholar] [CrossRef]
- Jiang, M.; Niu, S. Overview of Dual Mechanical Port Machines in Transportation Electrification. IEEE Trans. Transp. Electrification, 2023, in press. [CrossRef]
- Gao, Y.; Ehsani, M. A Mild Hybrid Vehicle Drive Train with a Floating Stator Motor-Configuration, Control Strategy, Design and Simulation Verification; SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2002. [Google Scholar]
- Nasiri, H.; Radan, A.; Ghayebloo, A.; Ahi, K. Dynamic modeling and simulation of transmotor based series-parallel HEV applied to Toyota Prius 2004. In Proceedings of the 2011 10th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 8–11 May 2011; pp. 1–4. [Google Scholar]
- Ershad, N.F.; Mehrjardi, R.T.; Ehsani, M. Electro-Mechanical EV Powertrain With Reduced Volt-Ampere Rating. IEEE Trans. Veh. Technol. 2018, 68, 224–233. [Google Scholar] [CrossRef]
- Ershad, N.F.; Mehrjardi, R.T.; Ehsani, M. Development of a kinetic energy recovery system using an active electro-magnetic slip coupling. IEEE Trans. Transp. Electrif. 2019, 5, 456–464. [Google Scholar] [CrossRef]
- Mehrjardi, R.T.; Ershad, N.F.; Ehsani, M. Transmotor-Based Powertrain for High-Performance Electric Vehicle. IEEE Trans. Transp. Electrif. 2020, 6, 1199–1210. [Google Scholar] [CrossRef]
- Sun, X.; Cheng, M.; Hua, W.; Xu, L. Optimal Design of Double-Layer Permanent Magnet Dual Mechanical Port Machine for Wind Power Application. IEEE Trans. Magn. 2009, 45, 4613–4616. [Google Scholar] [CrossRef]
- Sun, X.; Cheng, M. Thermal analysis and cooling system design of dual mechanical port machine for wind power application. IEEE Trans. Ind. Electron. 2013, 60, 1724–1733. [Google Scholar] [CrossRef]
- Lipo, T.A. The d-q Equations of a Synchronous Machine. In Analysis of Synchronous Machines, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2012; pp. 168–169. [Google Scholar]
- Liu, J.; Gao, Y.; Geng, S.; Wu, L. Nonlinear Control of Variable Speed Wind Turbines via Fuzzy Techniques. IEEE Access 2016, 5, 27–34. [Google Scholar] [CrossRef]
- Metal Strength Chart: A Detailed Guide to Metal Strengths—Eziil—Best Metal Fabrication Software. Available online: https://eziil.com/steel-strengths/ (accessed on 13 May 2024).
- Kremer, G.O.; Chiu, M.-C.; Lin, C.-Y.; Gupta, S.; Claudio, D.; Thevenot, H. Application of axiomatic design, TRIZ, and mixed integer programming to develop innovative designs: A locomotive ballast arrangement case study. Int. J. Adv. Manuf. Technol. 2012, 61, 827–842. [Google Scholar] [CrossRef]
- Prasad, R.M.; Mulla, M.A. A Novel Position-Sensorless Algorithm for Field-Oriented Control of DFIG With Reduced Current Sensors. IEEE Trans. Sustain. Energy 2018, 10, 1098–1108. [Google Scholar] [CrossRef]
- Abad, G.; López, J.; Rodrı, M.A.; Marroyo, L.; Iwański, G. Introduction to A Wind Energy Generation System: VSWT Based on DFIM Manufacturers. In Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; Institute of Electrical and Electronics Engineers, Inc.: Piscataway, NJ, USA, 2011; pp. 12–13. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shape | Description | Moment of Inertia |
|---|---|---|
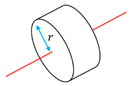 | Solid cylinder (or disk) of radius r. | |
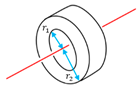 | Annular cylinder (or ring) of inner radius r1 and outer radius r2. |
| Parameter | Value |
|---|---|
| Rated power | 2.12 MW |
| Blade length | 50 m |
| Blade inertia | 6 × 106 kg·m2 |
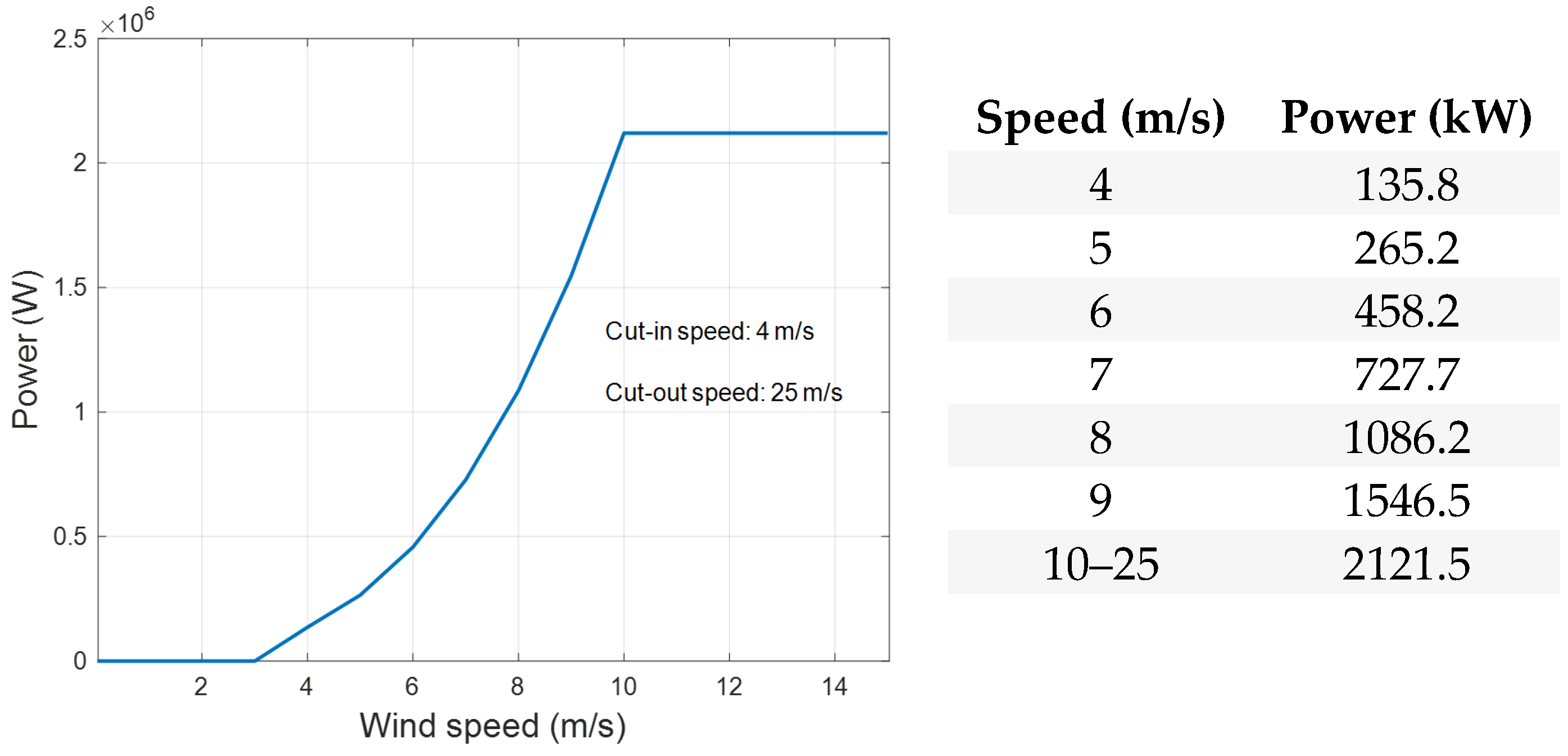
| Rated wind speed | 10 m/s |
| Cut-in speed | 4 m/s |
| Cut-out speed | 25 m/s |
| Air density | 1.225 kg/m3 |
| Parameter | Value |
|---|---|
| Rated stator voltage (line-to-line) | |
| Rated inner rotor voltage (line-to-line) | |
| 3 | |
| Stator to inner rotor turns ratio | 1:1 |
| 2.6 mH | |
| 0.1 mH | |
| 0.1 mH | |
| 1.5 × 10−3 Ω | |
| 1.2 × 10−3 Ω | |
| Parameters | Value |
|---|---|
| 3000 kg·m2 | |
| 32,000 kg·m2 | |
| Rated Inner rotor torque | 32,739 N·m |
| Rated Outer rotor torque | 5300 N·m |
| 45 | |
| 10 |
| Parameters | Type/Value |
|---|---|
| Shape | Ring |
| Material | Steel |
| Density | 7850 kg/m3 |
| 0.5 m | |
| 0.6 m | |
| 0.3624 m | |
| Mass | 983.7 kg |
| 300 kg·m2 |
| Parameters | Value |
|---|---|
| Outer rotor speed limit | 125 rad/s |
| Flywheel speed limit | 1250 rad/s (11,937 rpm) |
| Storage capacity | 65.1 kWh |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Y.; Ehsani, M. Inertial Energy Storage Integration with Wind Power Generation Using Transgenerator–Flywheel Technology. Energies 2024, 17, 3218. https://doi.org/10.3390/en17133218
Deng Y, Ehsani M. Inertial Energy Storage Integration with Wind Power Generation Using Transgenerator–Flywheel Technology. Energies. 2024; 17(13):3218. https://doi.org/10.3390/en17133218
Chicago/Turabian StyleDeng, Yi, and Mehrdad Ehsani. 2024. "Inertial Energy Storage Integration with Wind Power Generation Using Transgenerator–Flywheel Technology" Energies 17, no. 13: 3218. https://doi.org/10.3390/en17133218
APA StyleDeng, Y., & Ehsani, M. (2024). Inertial Energy Storage Integration with Wind Power Generation Using Transgenerator–Flywheel Technology. Energies, 17(13), 3218. https://doi.org/10.3390/en17133218