
Grid-Forming Control for Solar Generation System with Battery Energy Storage
 , ,
, ,
Abstract
:1. Introduction
2. Topology of the Studied System
3. Proposed Grid-Forming Control for Solar Generation
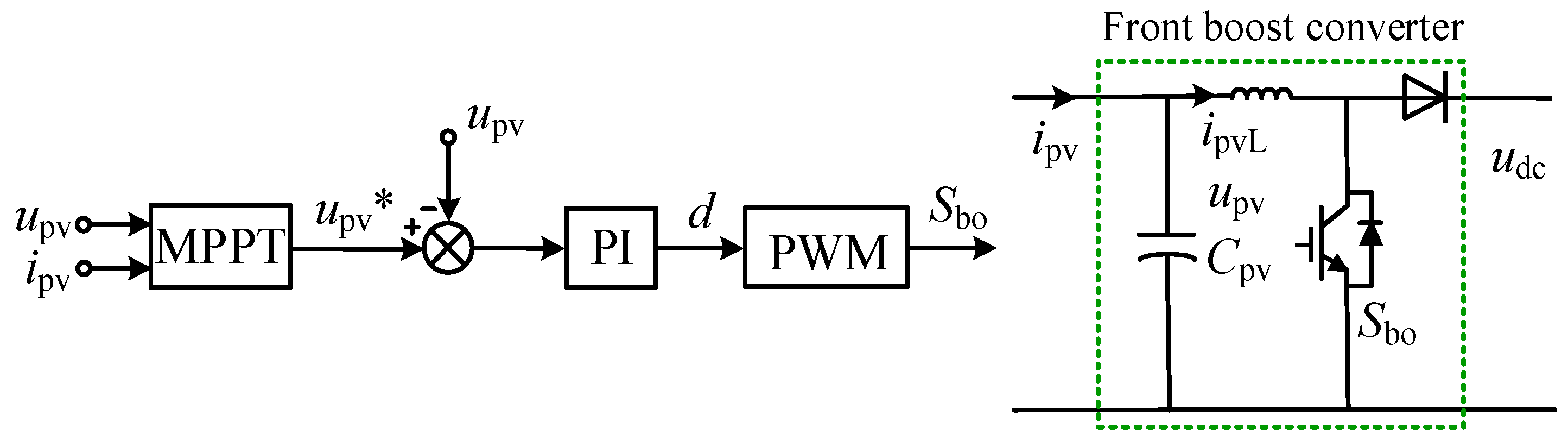
3.1. Control of the Front Boost Converter
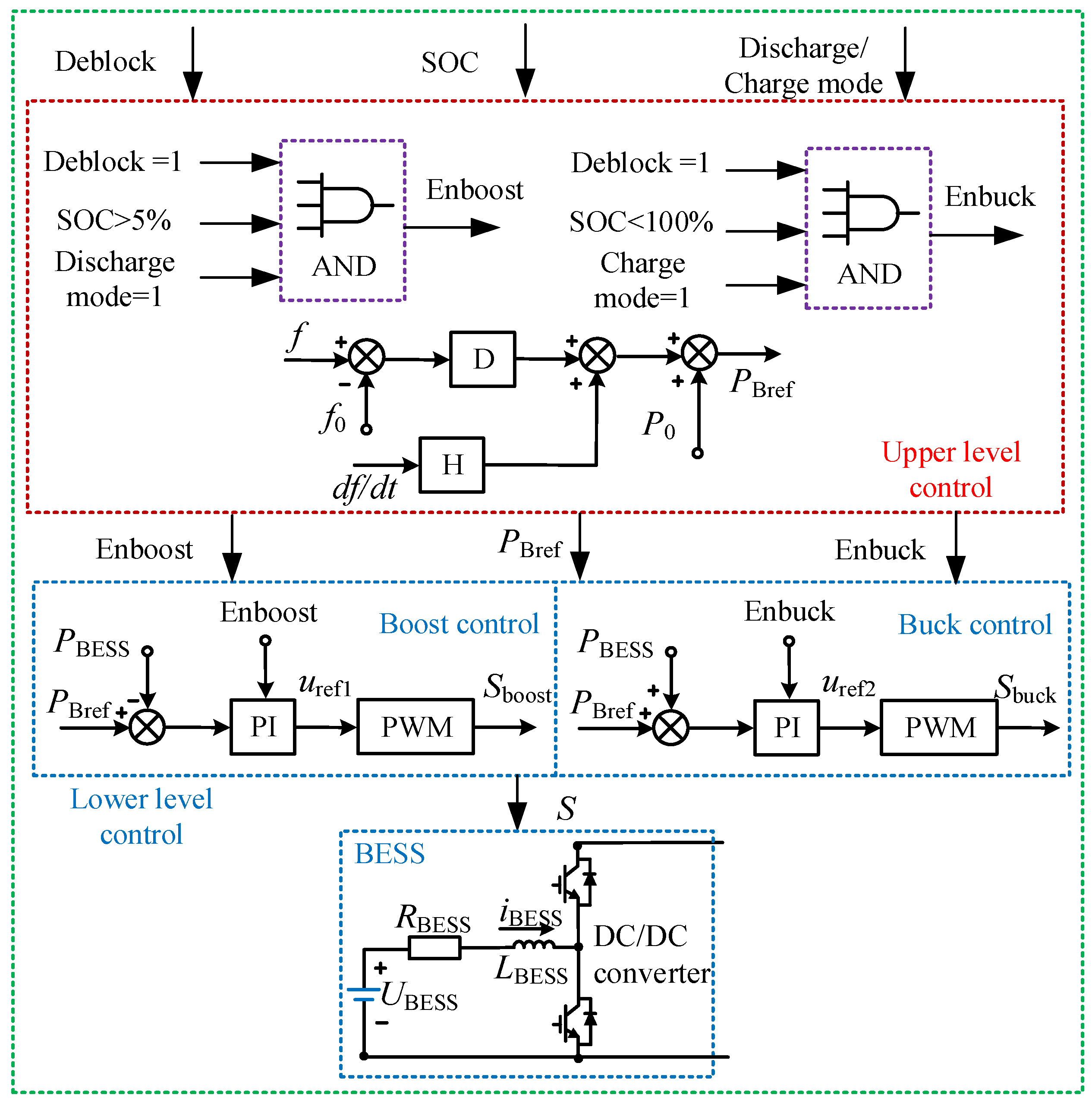
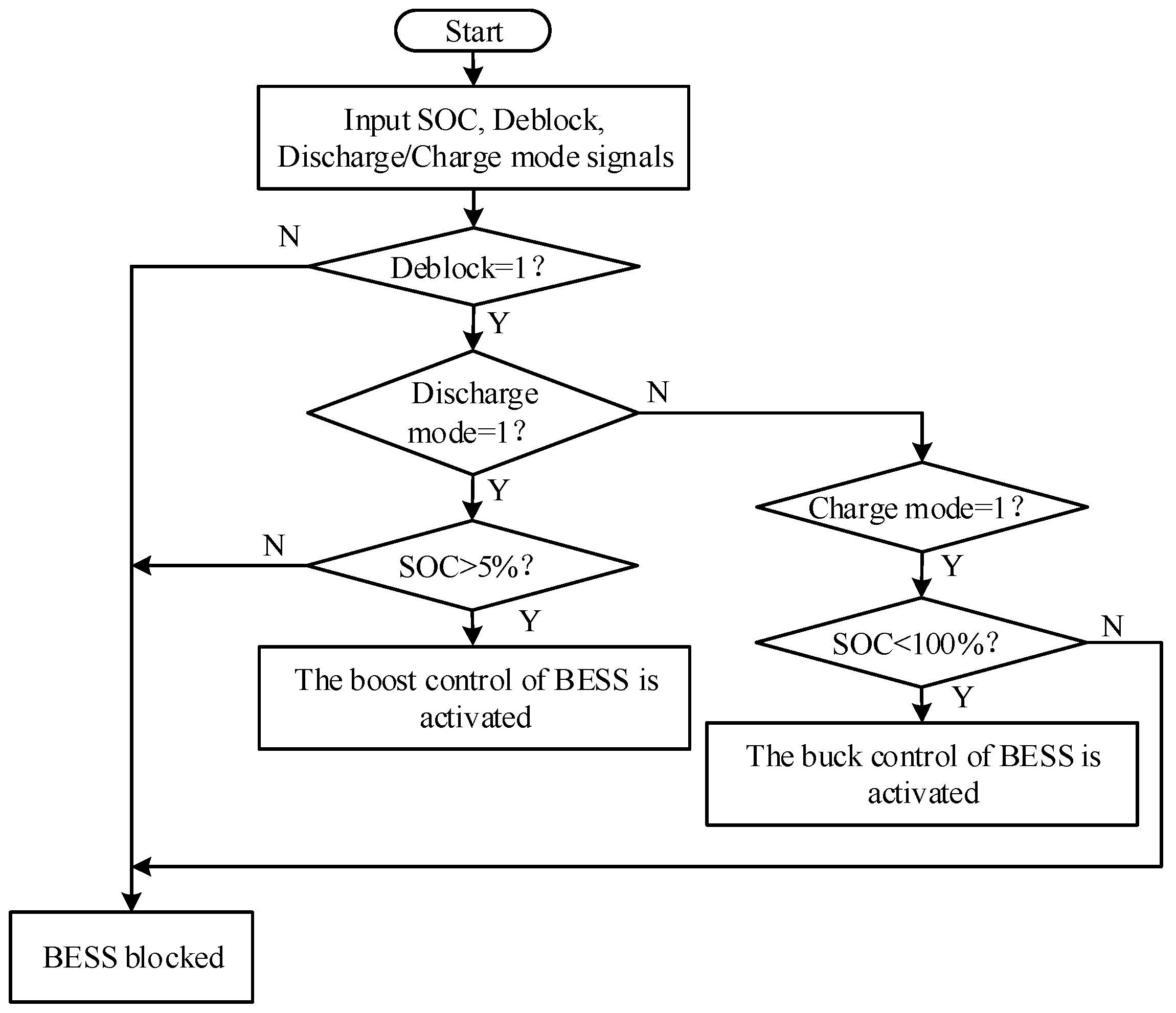
3.2. Control of the BESS
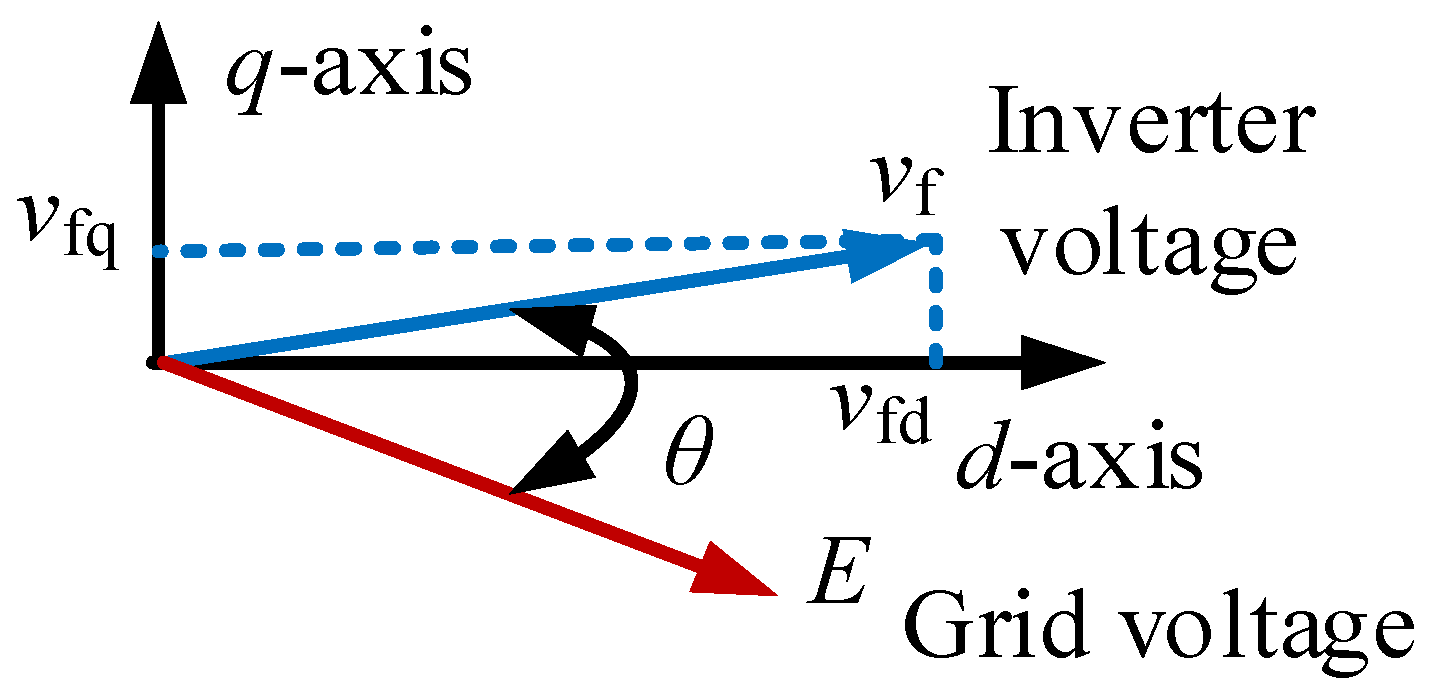
3.3. Grid-Forming Control of the Inverter
4. Simulation Result
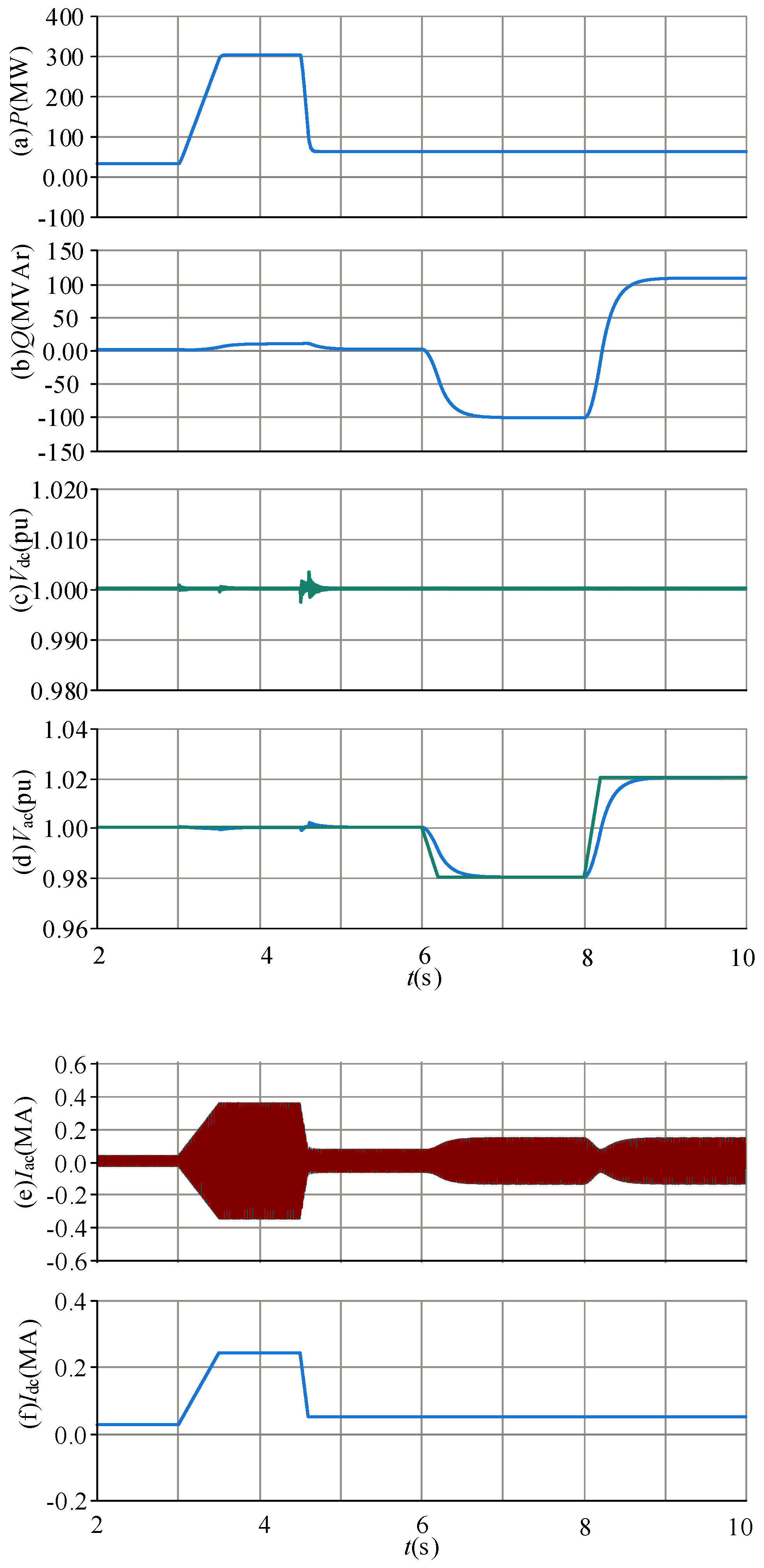
4.1. Performance Evaluation of the Grid-Forming Control during Power Variation and AC Voltage Variation
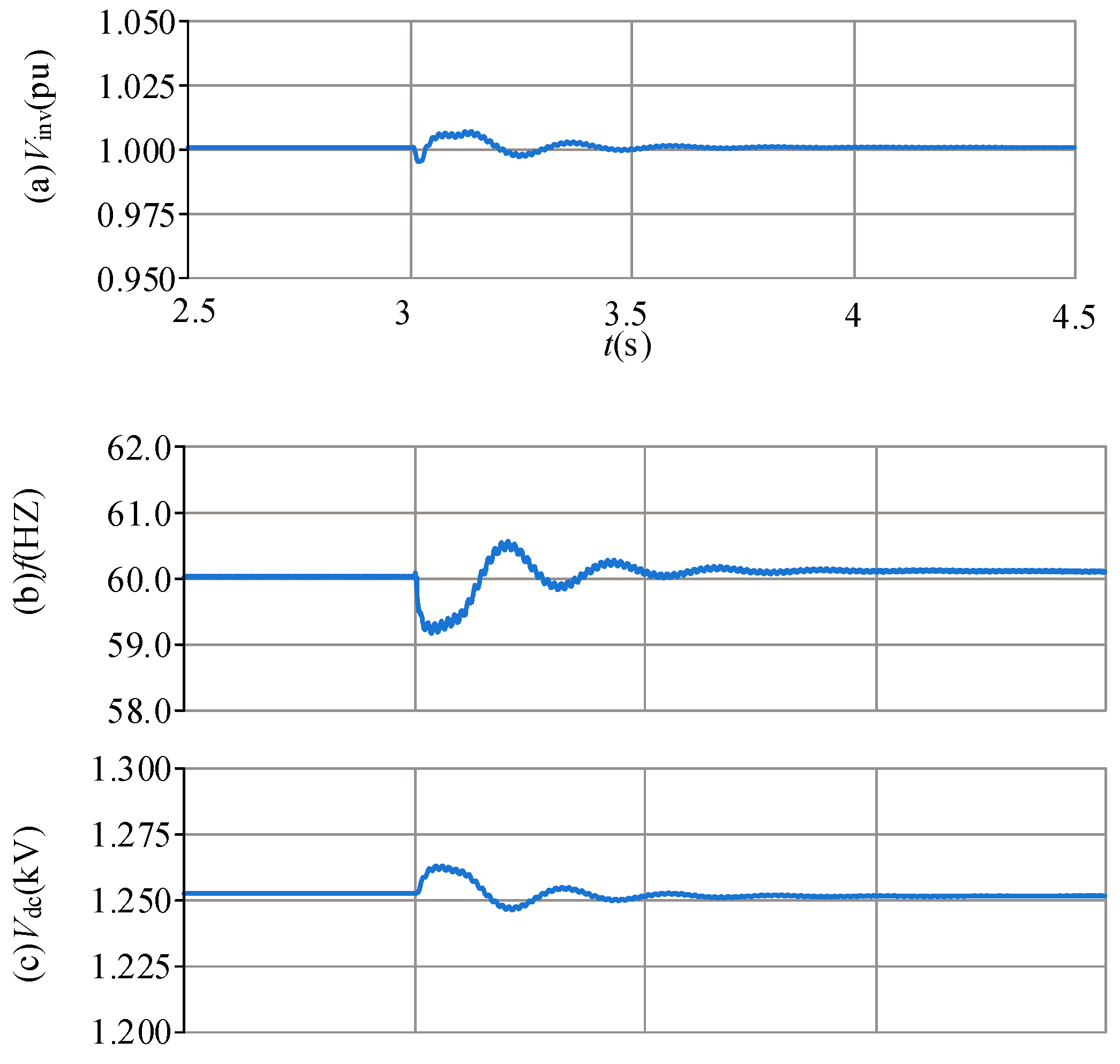
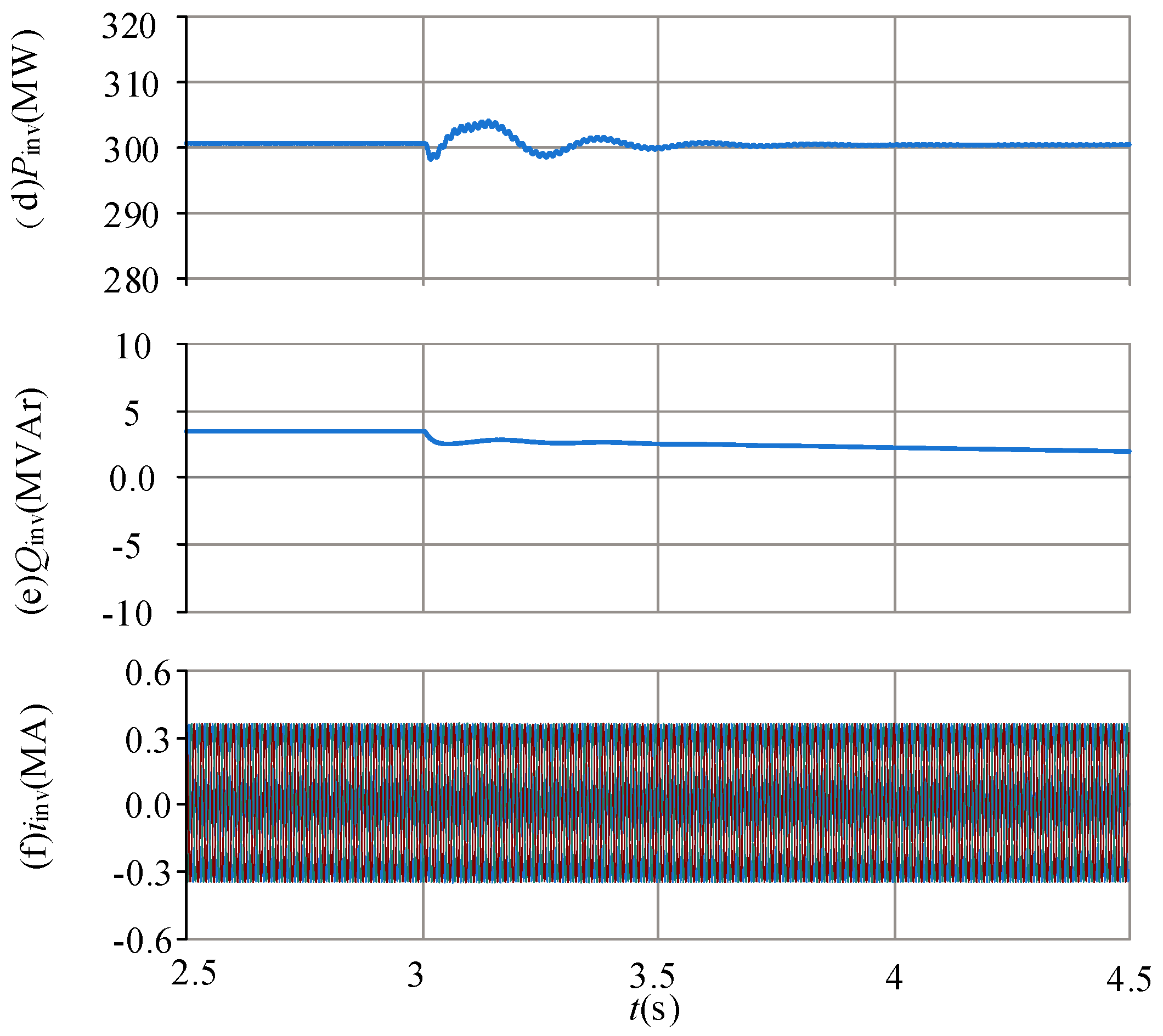
4.2. Performance Evaluation of BESS during the Grid Frequency Change
4.3. Performance Evaluation of System during the Grid Fault
4.4. Performance of System during the Transition from the Grid-Connected Mode to Islanded Mode
4.5. Performance of System during Phase Jump and Grid Impedance Variation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Harnefors, L.; Wang, X.; Yepes, A.G.; Blaabjerg, F. Passivity-Based Stability Assessment of Grid-Connected VSCs—An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 116–125. [Google Scholar] [CrossRef]
- Zhou, J.Z.; Ding, H.; Fan, S.; Zhang, Y.; Gole, A.M. Impact of Short-Circuit Ratio and Phase-Locked-Loop Parameters on the Small-Signal Behavior of a VSC-HVDC Converter. IEEE Trans. Power Deliv. 2014, 29, 2287–2296. [Google Scholar] [CrossRef]
- Fan, L. Modeling Type-4 Wind in Weak Grids. IEEE Trans. Sustain. Energy 2019, 10, 853–864. [Google Scholar] [CrossRef]
- Hu, J.; Huang, Y.; Wang, D.; Yuan, H.; Yuan, X. Modeling of Grid-Connected DFIG-Based Wind Turbines for DC-Link Voltage Stability Analysis. IEEE Trans. Sustain. Energy 2015, 6, 1325–1336. [Google Scholar] [CrossRef]
- Lin, X.; Liu, Y.; Yu, J.; Yu, R.; Zhang, J.; Wen, H. Stability analysis of Three-phase Grid-Connected inverter under the weak grids with asymmetrical grid impedance by LTP theory in time domain. Int. J. Electr. Power Energy Syst. 2022, 142, 108244. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q Small-Signal Impedance of Grid-Tied Inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar] [CrossRef]
- Sun, J. Impedance-Based Stability Criterion for Grid-Connected Inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Zhang, X.; Xia, D.; Fu, Z.; Wang, G.; Xu, D. An Improved Feedforward Control Method Considering PLL Dynamics to Improve Weak Grid Stability of Grid-Connected Inverters. IEEE Trans. Ind. Appl. 2018, 54, 5143–5151. [Google Scholar] [CrossRef]
- Givaki, K.; Chen, D.; Xu, L. Current Error Based Compensations for VSC Current Control in Weak Grids for Wind Farm Applications. IEEE Trans. Sustain. Energy 2019, 10, 26–35. [Google Scholar] [CrossRef]
- Egea-Alvarez, A.; Fekriasl, S.; Hassan, F.; Gomis-Bellmunt, O. Advanced Vector Control for Voltage Source Converters Connected to Weak Grids. IEEE Trans. Power Syst. 2015, 30, 3072–3081. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H. Power-Synchronization Control of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Syst. 2010, 25, 809–820. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H. Interconnection of Two Very Weak AC Systems by VSC-HVDC Links Using Power-Synchronization Control. IEEE Trans. Power Syst. 2011, 26, 344–355. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics Between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Meng, X.; Liu, J.; Liu, Z. A Generalized Droop Control for Grid-Supporting Inverter Based on Comparison Between Traditional Droop Control and Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 34, 5416–5438. [Google Scholar] [CrossRef]
- Wu, W.; Chen, Y.; Zhou, L.; Luo, A.; Zhou, X.; He, Z.; Yang, L.; Xie, Z.; Liu, J.; Zhang, M. Sequence Impedance Modeling and Stability Comparative Analysis of Voltage-Controlled VSGs and Current-Controlled VSGs. IEEE Trans. Ind. Electron. 2019, 66, 6460–6472. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Hu, W.; Shu, S.; Yu, P.; Zhang, Z.; Blaabjerg, F. Unified Modeling and Analysis of Dynamic Power Coupling for Grid-Forming Converters. IEEE Trans. Power Electron. 2022, 37, 2321–2337. [Google Scholar] [CrossRef]
- Mallemaci, V.; Mandrile, F.; Rubino, S.; Mazza, A.; Carpaneto, E.; Bojoi, R. A comprehensive comparison of Virtual Synchronous Generators with focus on virtual inertia and frequency regulation. Electr. Power Syst. Res. 2021, 201, 107516. [Google Scholar] [CrossRef]
- Barać, B.; Krpan, M.; Capuder, T.; Kuzle, I. Modeling and Initialization of a Virtual Synchronous Machine for Power System Fundamental Frequency Simulations. IEEE Access 2021, 9, 160116–160134. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | |
|---|---|---|
| BESS | DC voltage | 0.5 kV |
| Rated Capacity | 16.7 (kA∙h) | |
| Resistive Drop | 0.001 pu | |
| Voltage at Exponential Point | 1.03 pu | |
| Inductance and capacitor in DC/DC | 0.2 μH | |
| 3000 mF | ||
| 0.5 μH | ||
| Inverter | Rating | 300 MVA |
| DC voltage | 1.25 kV | |
| AC voltage | 0.69 kV | |
| DC capacitor | 30,000 mF | |
| Transformer ratio | 0.69/33 kV | |
| Transformer inductance and resistor | 0.08, 0.002 pu | |
| Converter reactance and resistor | 0.15 pu, 0.0015 pu | |
| Filter capacitor and resistor | 0.10 pu, 0.001 pu |
| Time | Events |
|---|---|
| 0–3 s | Solar power generation at 0.1 pu, BES operation off |
| 3–3.5 s | Solar power generation increases from 0.1 pu to 1 pu |
| 4.5–4.6 s | Solar power generation decreases from 1 pu to 0.2 pu |
| 6–6.2 s | Inverter AC voltage decreases from 1 pu to 0.98 pu |
| 8–8.2 s | Inverter AC voltage increases from 0.98 pu to 1.02 pu |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Y.; Yu, L.; Wu, M.; Lv, S.; Fu, Z.; Tong, W.; Li, W.; Shi, S. Grid-Forming Control for Solar Generation System with Battery Energy Storage. Energies 2024, 17, 3642. https://doi.org/10.3390/en17153642
Cai Y, Yu L, Wu M, Lv S, Fu Z, Tong W, Li W, Shi S. Grid-Forming Control for Solar Generation System with Battery Energy Storage. Energies. 2024; 17(15):3642. https://doi.org/10.3390/en17153642
Chicago/Turabian StyleCai, Yupeng, Lujie Yu, Meng Wu, Shengyang Lv, Ziyu Fu, Wenhao Tong, Wei Li, and Songjie Shi. 2024. "Grid-Forming Control for Solar Generation System with Battery Energy Storage" Energies 17, no. 15: 3642. https://doi.org/10.3390/en17153642