
Storage Regulation Mechanism and Control Strategy of a Hydraulic Wave Power Generation System
 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Working Principle of the Hydraulic Wave Power Generation System
3. Mathematical Modeling of Wave Simulation Loops
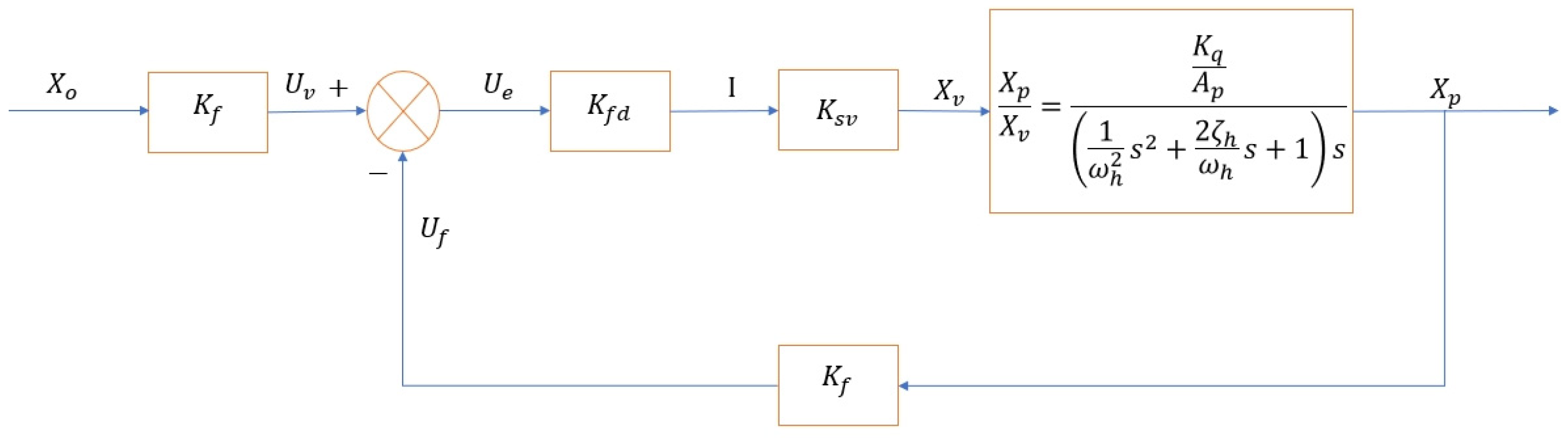
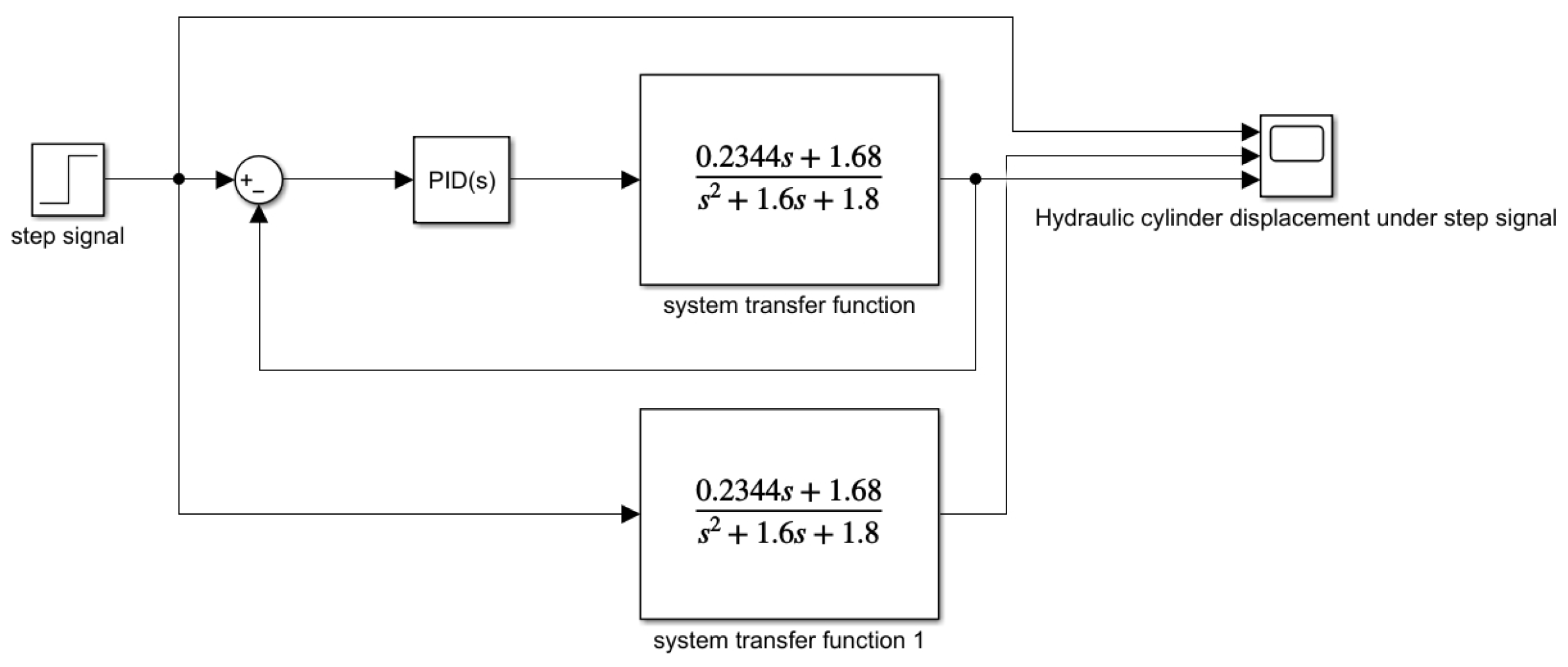
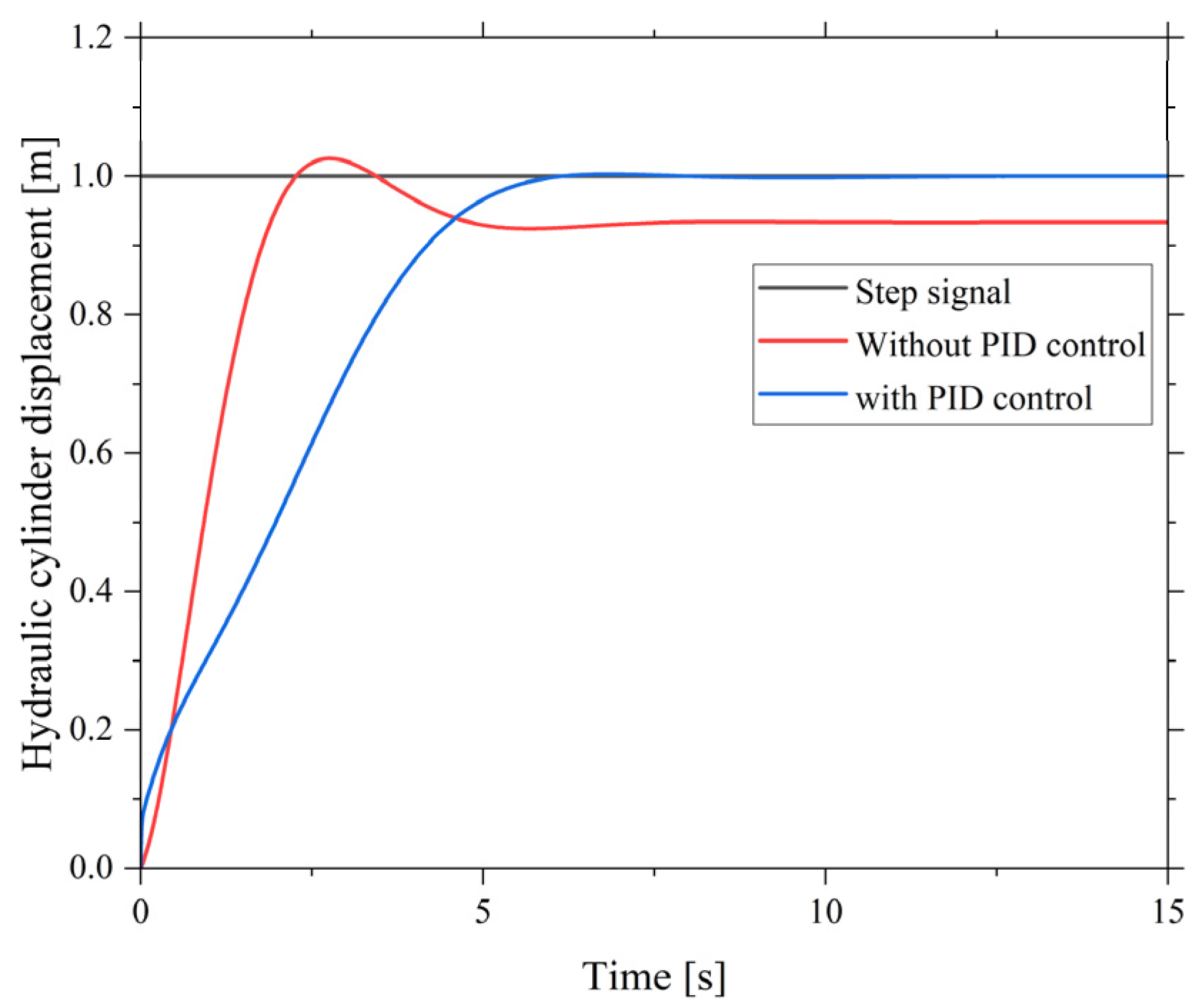
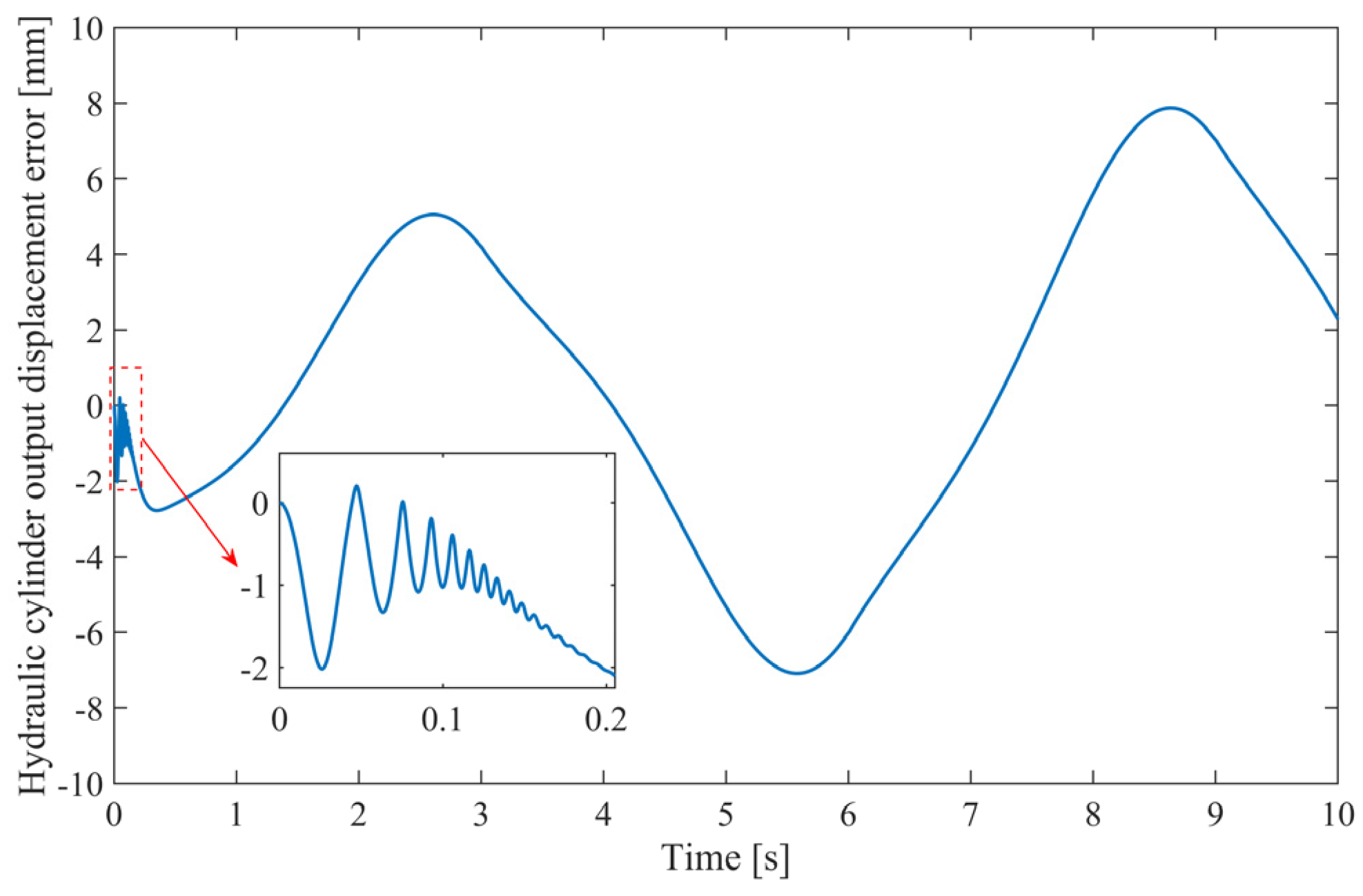
3.1. Establishing a Mathematical Model for the Hydraulic Cylinder Displacement Control System
- 1.
- First, the transfer function of the valve-controlled cylinder is expressed as
- 2.
- Next, the transfer function of the servo valve is expressed as
- 3.
- Moving further, the transfer function of the servo amplifier is expressed as
- 4.
- Finally, the transfer function of the displacement sensor is modeled as
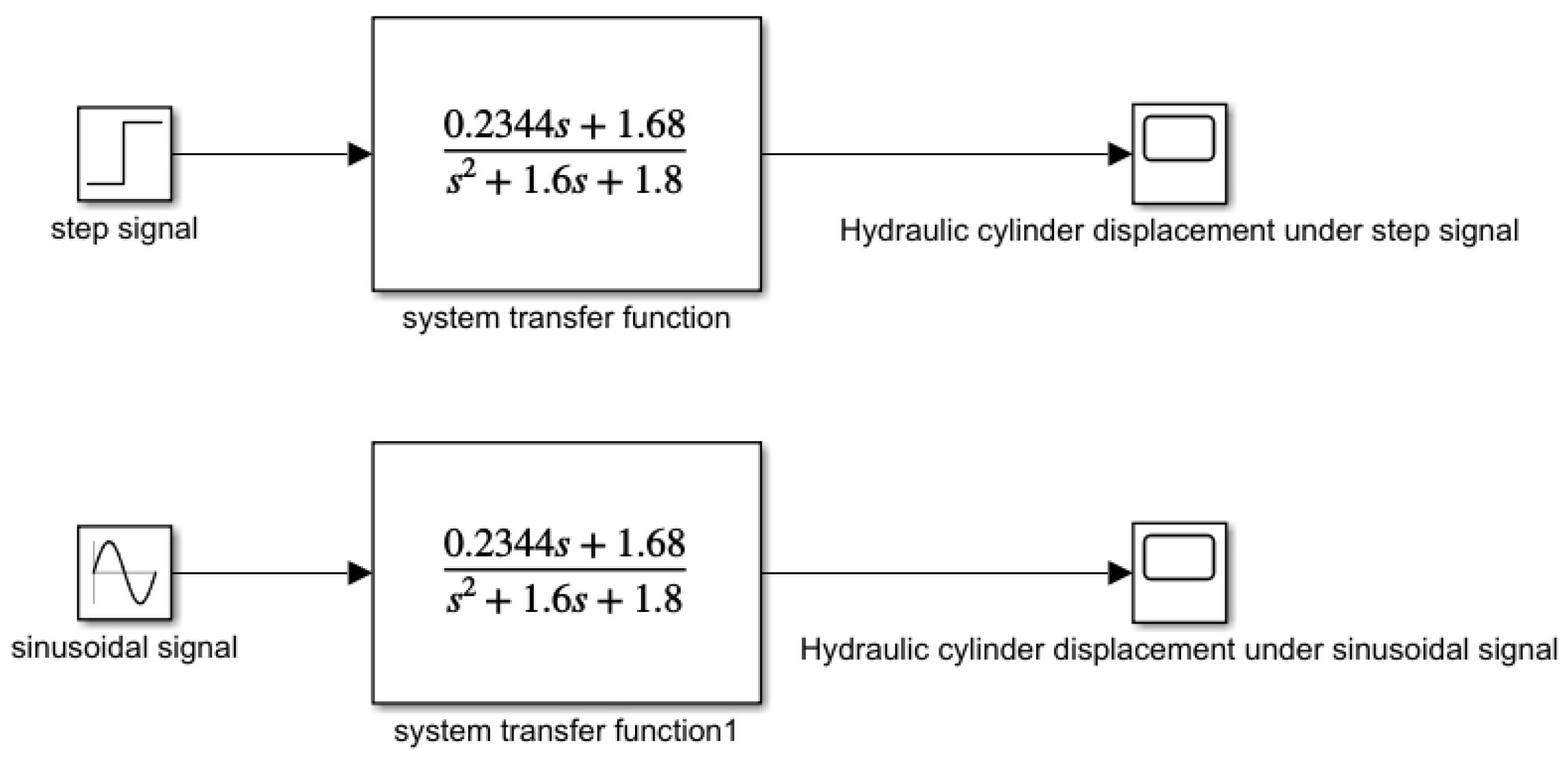
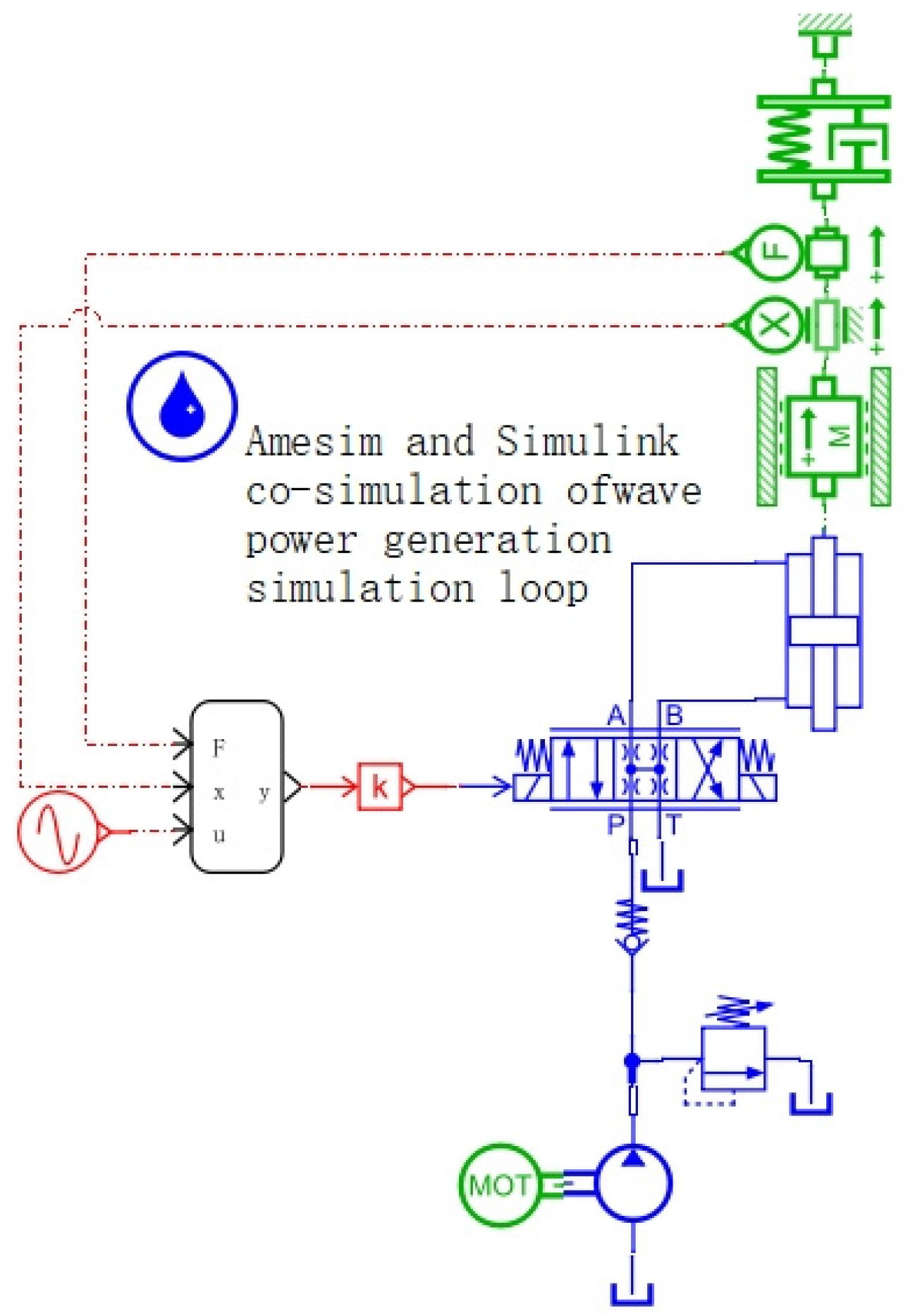
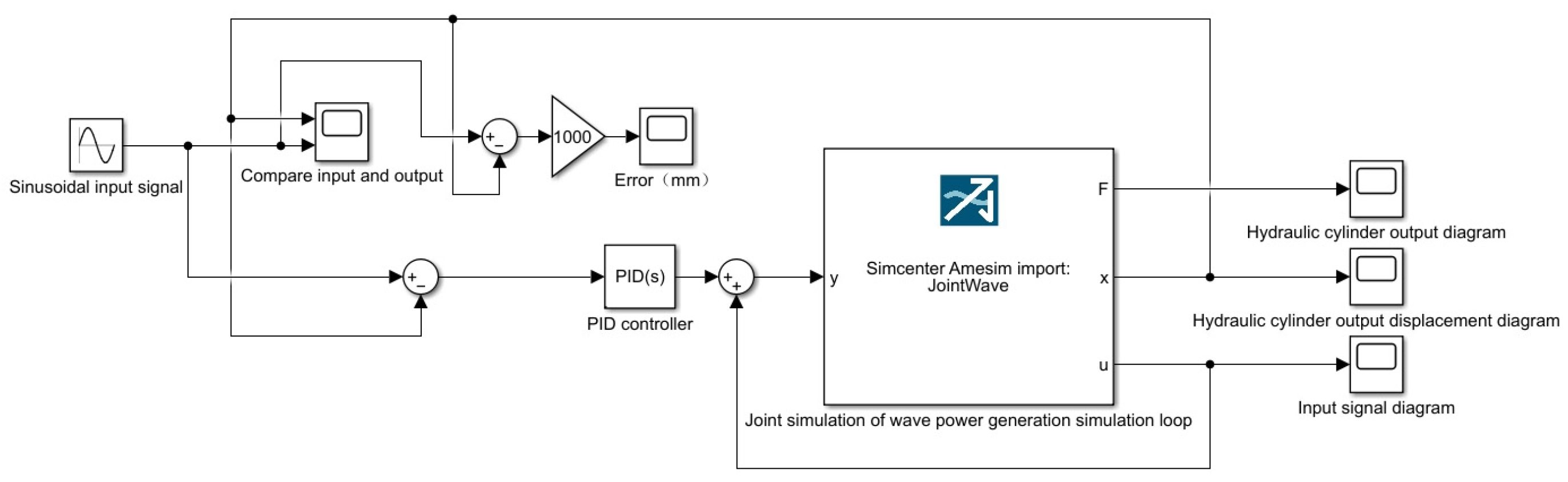
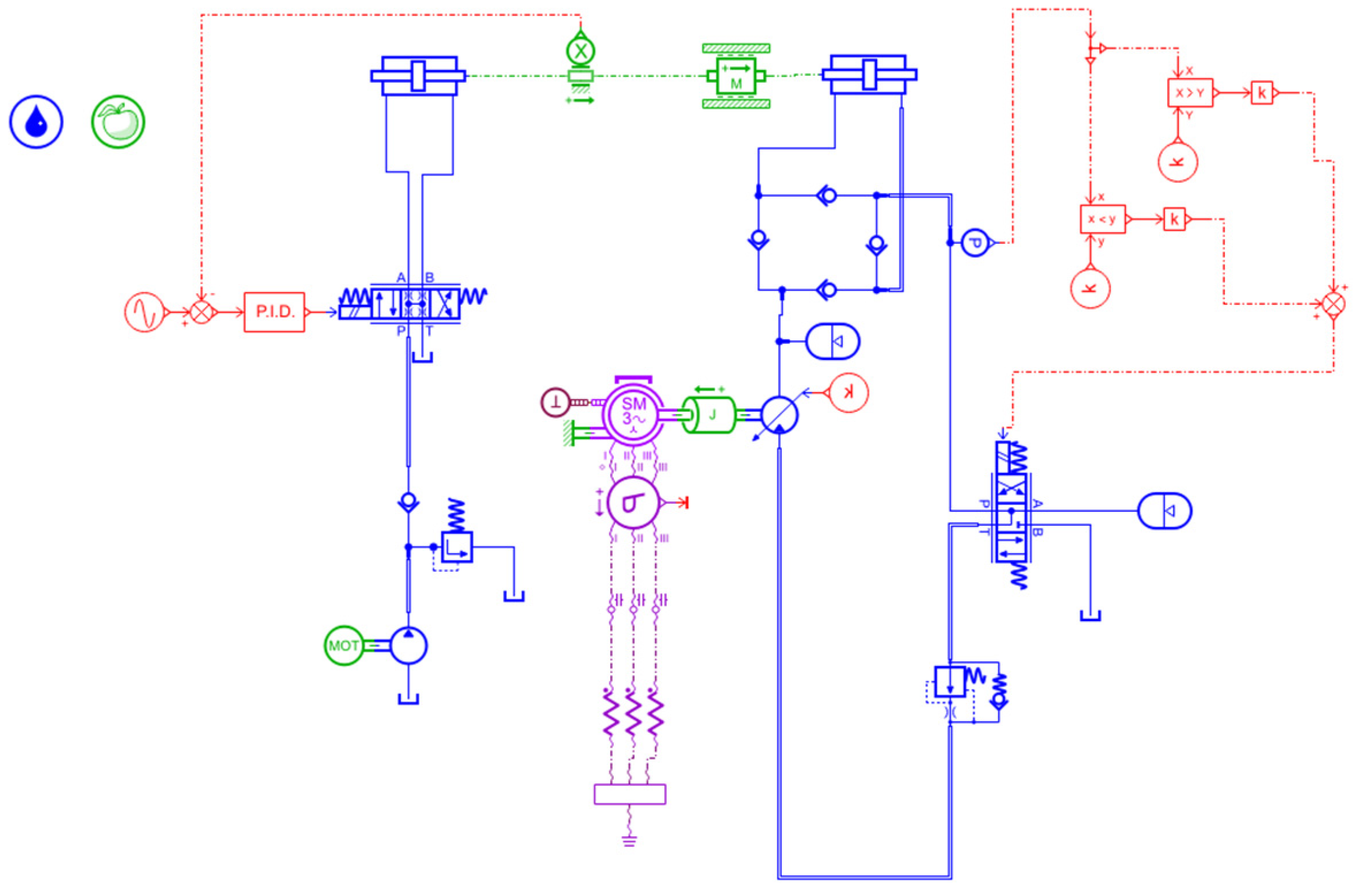
3.2. Establishing an Amesim and Simulink Co-Simulation Model of the Wave Power Generation Simulation Loop
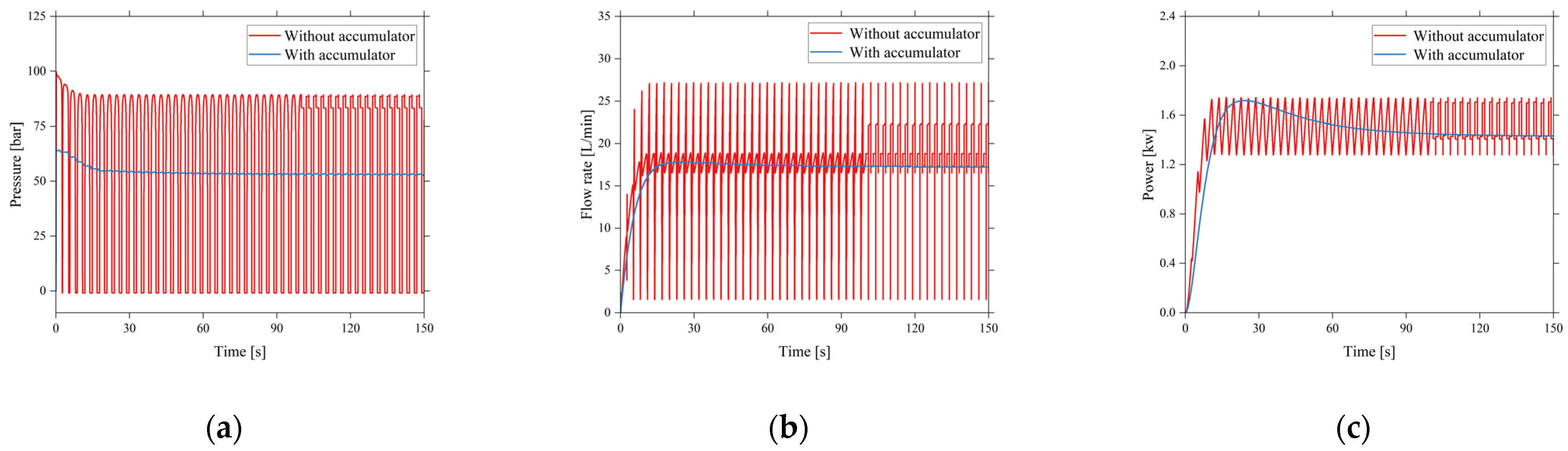
4. Establishing a Simulation Model of the Hydraulic Wave Energy Generation System Using Amesim
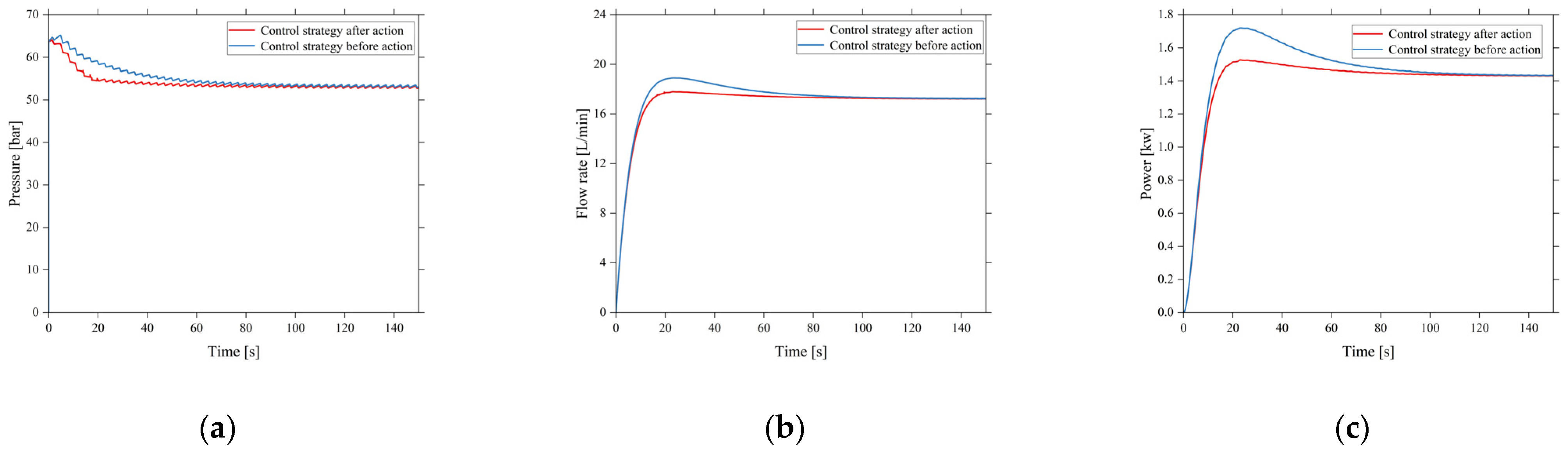
Establishing a Simulation Model of the Wave Power Generation System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Peng, A.; Huang, M. Research progress of PTO system for wave energy converter. Acta Energiae Solaris Sin. 2023, 44, 381–392. [Google Scholar]
- Chen, J.; Lan, F.; Guo, H.; Li, J. Review on wave energy power generation control technology. Electr. Power Autom. Equip. 2023, 43, 124–136. [Google Scholar]
- Wang, K.; Sheng, S.; Ye, Y.; Zhang, Y.; You, Y. Boost converter converting mechanism and control strategy for hydraulic power generation system in wave energy converter. Autom. Electr. Power Syst. 2017, 41, 173–178. [Google Scholar]
- Jusoh, M.A.; Ibrahim, M.Z.; Daud, M.Z.; Albani, A.; Mohd Yusop, Z. Hydraulic power take-off concepts for wave energy conversion system: A review. Energies 2019, 12, 4510. [Google Scholar] [CrossRef]
- Ye, Y.; Wang, K.; Zhang, Y.; Huang, Z. Numerical simulation research on energy storage system of wave energy converter. Acta Energiae Solaris Sin. 2020, 41, 30–35. [Google Scholar]
- Ma, S.; Wang, X.; Negnevitsky, M.; Franklin, E. Performance investigation of a wave-driven compressed air energy storage system. J. Energy Storage 2023, 73, 109126. [Google Scholar]
- Peng, J.; Liu, Y.; Xu, L. Modeling and Simulation Research on Accumulator effect of the Hydraulic Power Take-off System for a Wave Energy converter. In Proceedings of the 2017 5th International Conference on Frontiers of Manufacturing Science and Measuring Technology (FMSMT 2017), Taiyuan, China, 24–25 June 2017; Atlantis Press: Amsterdam, The Netherlands, 2017; pp. 1383–1390. [Google Scholar]
- Fan, Z.; Zhang, Y.; Li, X.; Ye, Y. Research status and prospect of hydraulic wave energy power generation technology. Adv. New Energy 2023, 11, 388–394. [Google Scholar]
- Liu, C.; Hu, M.; Yang, Q.; Feng, W.; Bao, G.; Zeng, Y. Hardware-in-the-loop simulation technology of wave power generation. J. Mech. Eng. 2021, 57, 286–296. [Google Scholar]
- Chen, Q.; Li, Y.; Xu, Z.; Yu, H.; Cai, Y.; Chen, D. Research on hydraulic power take-off system of resonant wave generation device. J. Mech. Eng. 2017, 53, 209–216. [Google Scholar]
- Lian, J.; Wang, X.; Wang, X.; Wu, D. Research on Wave Energy Converters. Energies 2024, 17, 1577. [Google Scholar] [CrossRef]
- Negri, M.; Malavasi, S. Wave Energy Harnessing in Shallow Water through Oscillating Bodies. Energies 2018, 11, 2730. [Google Scholar] [CrossRef]
- Sakr, A.H.; Metwalli, S.M.; Anis, Y.H. Dynamics of Heaving Buoy Wave Energy Converters with a Stiffness Reactive Controller. Energies 2021, 14, 44. [Google Scholar]
- Ramezanzadeh, S.; Ozbulut, M.; Yildiz, M. A Numerical Investigation of the Energy Efficiency Enhancement of Oscillating Water Column Wave Energy Converter Systems. Energies 2022, 15, 8276. [Google Scholar] [CrossRef]
- Simonetti, I.; Esposito, A.; Cappietti, L. Experimental Proof-of-Concept of a Hybrid Wave Energy Converter Based on Oscillating Water Column and Overtopping Mechanisms. Energies 2022, 15, 8065. [Google Scholar] [CrossRef]
- Ye, Y.; Sheng, S.; Le, W.; Wang, K.; Zhang, Y. Simulation study on hydraulic energy conversion system of wave energy device based on MATLAB and Simulink. J. Ocean. Technol. 2021, 40, 87–95. [Google Scholar]
- Song, W.; Shi, H.; Liu, P.; Jiang, Q.; Yu, H. Experimental Study on working characteristics of wave energy converter with energy accumulator. Acta Energiae Solaris Sin. 2020, 41, 164–170. [Google Scholar]
- Wang, Z.; You, Y.; Sheng, S.; Zhang, Y.; Wang, K.; Ye, Y. Open sea tests of hydraulic autonomous control system in wave energy convertor. Acta Energiae Solaris Sin. 2019, 40, 2085–2090. [Google Scholar]
- Chen, Q.; Xu, Z.; Yue, X.; Yu, H.; Chen, D. Characteristicmodeling and parameter optimization of the accumulatorin hydraulic power take-off system for ware powergeneration. J. Basic Sci. Eng. 2019, 27, 226–237. [Google Scholar]
- Zhang, Y.; Sheng, S.; You, Y.; Lin, H.; Zhang, C. Design on hydraulic energy storage system of wave energy converters. Mach. Tool Hydraul. 2016, 44, 117–121. [Google Scholar]
- Marino, M.; Faraci, C.; Musumeci, R.E. Shoaling waves interacting with an orthogonal current. J. Mar. Sci. Eng. 2020, 8, 281. [Google Scholar] [CrossRef]
- Bao, J.; Li, W.; Zhang, D.; Lin, Y.; Liu, H.; Shi, M. Analysis of an inverse pendulum wave power generation system with pressure-maintaining storage based on hydraulic transmission. Autom. Electr. Power Syst. 2012, 36, 205–209. [Google Scholar]
- Zhang, W.; Liu, Y.; Li, D. Simulation research on the hydraulic servo control type wave power station. Acta Energiae Solaris Sin. 2016, 3, 570–576. [Google Scholar]
- Song, W.; Shi, H.; Liu, P. Simulation study of oscillating buoy wave energy generation system based on double-stroke hydraulic transmission. Acta Energiae Solaris Sin. 2016, 37, 256–260. [Google Scholar]
- Moreno-Torres, P.; Blanco, M.; Navarro, G.; Lafoz, M. Power smoothing system for wave energy converters by means of a supercapacitor-based energy storage system. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–9. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, J.; Huang, C.; Xue, M.; Feng, R.; Zhou, E.; Zhong, Z.; Ku, X. Storage Regulation Mechanism and Control Strategy of a Hydraulic Wave Power Generation System. Energies 2024, 17, 4151. https://doi.org/10.3390/en17164151
Peng J, Huang C, Xue M, Feng R, Zhou E, Zhong Z, Ku X. Storage Regulation Mechanism and Control Strategy of a Hydraulic Wave Power Generation System. Energies. 2024; 17(16):4151. https://doi.org/10.3390/en17164151
Chicago/Turabian StylePeng, Jianjun, Chenchen Huang, Meng Xue, Run Feng, Erhao Zhou, Zhidan Zhong, and Xiangchen Ku. 2024. "Storage Regulation Mechanism and Control Strategy of a Hydraulic Wave Power Generation System" Energies 17, no. 16: 4151. https://doi.org/10.3390/en17164151
APA StylePeng, J., Huang, C., Xue, M., Feng, R., Zhou, E., Zhong, Z., & Ku, X. (2024). Storage Regulation Mechanism and Control Strategy of a Hydraulic Wave Power Generation System. Energies, 17(16), 4151. https://doi.org/10.3390/en17164151