

A Photovoltaic and Wind-Powered Electric Vehicle with a Charge Equalizer



Abstract
:1. Introduction
2. Materials and Methods
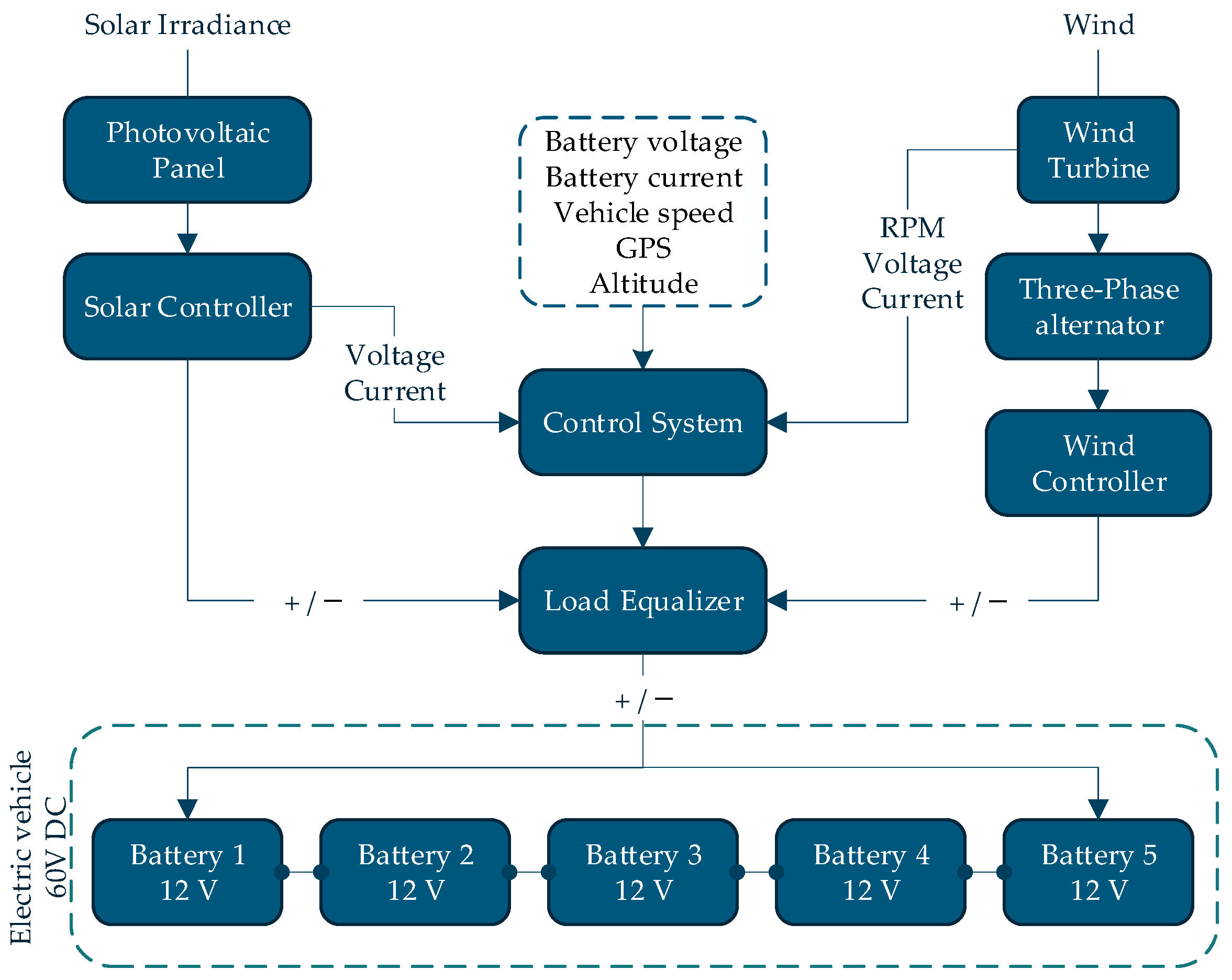
2.1. Three-Dimensional Design of the Charge Equalization System
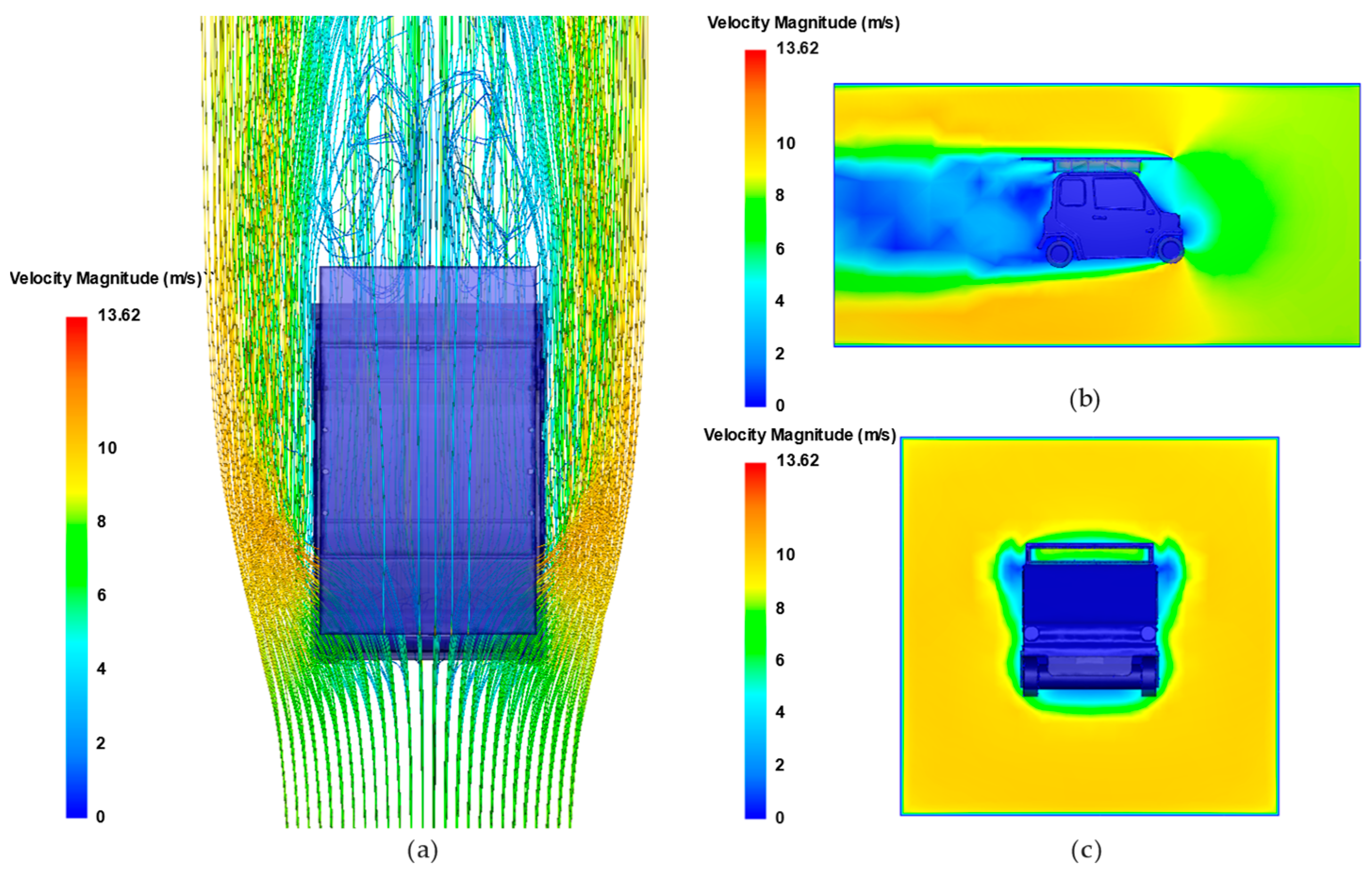
2.2. Aerodynamic Analysis
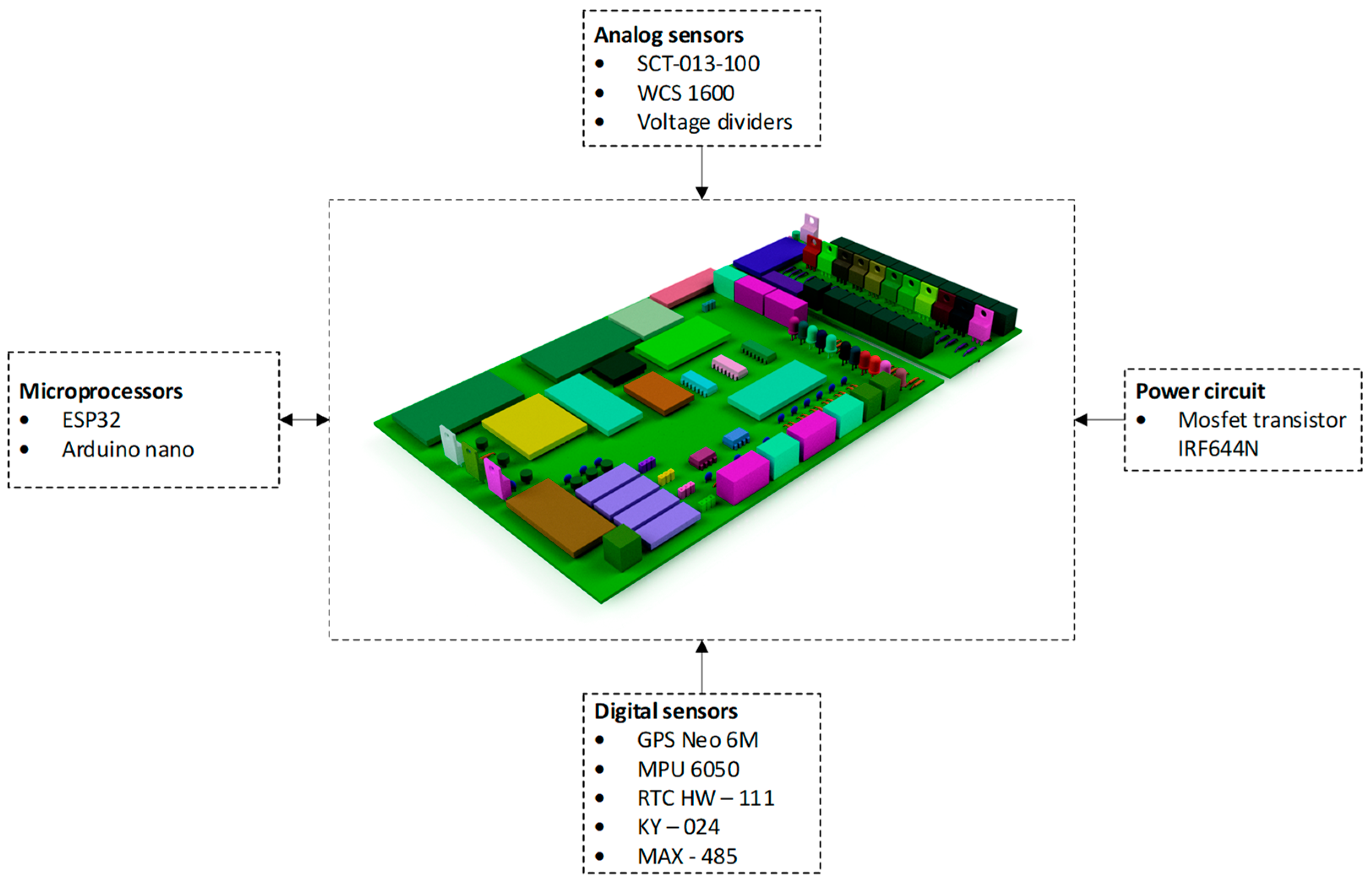
2.3. Hardware
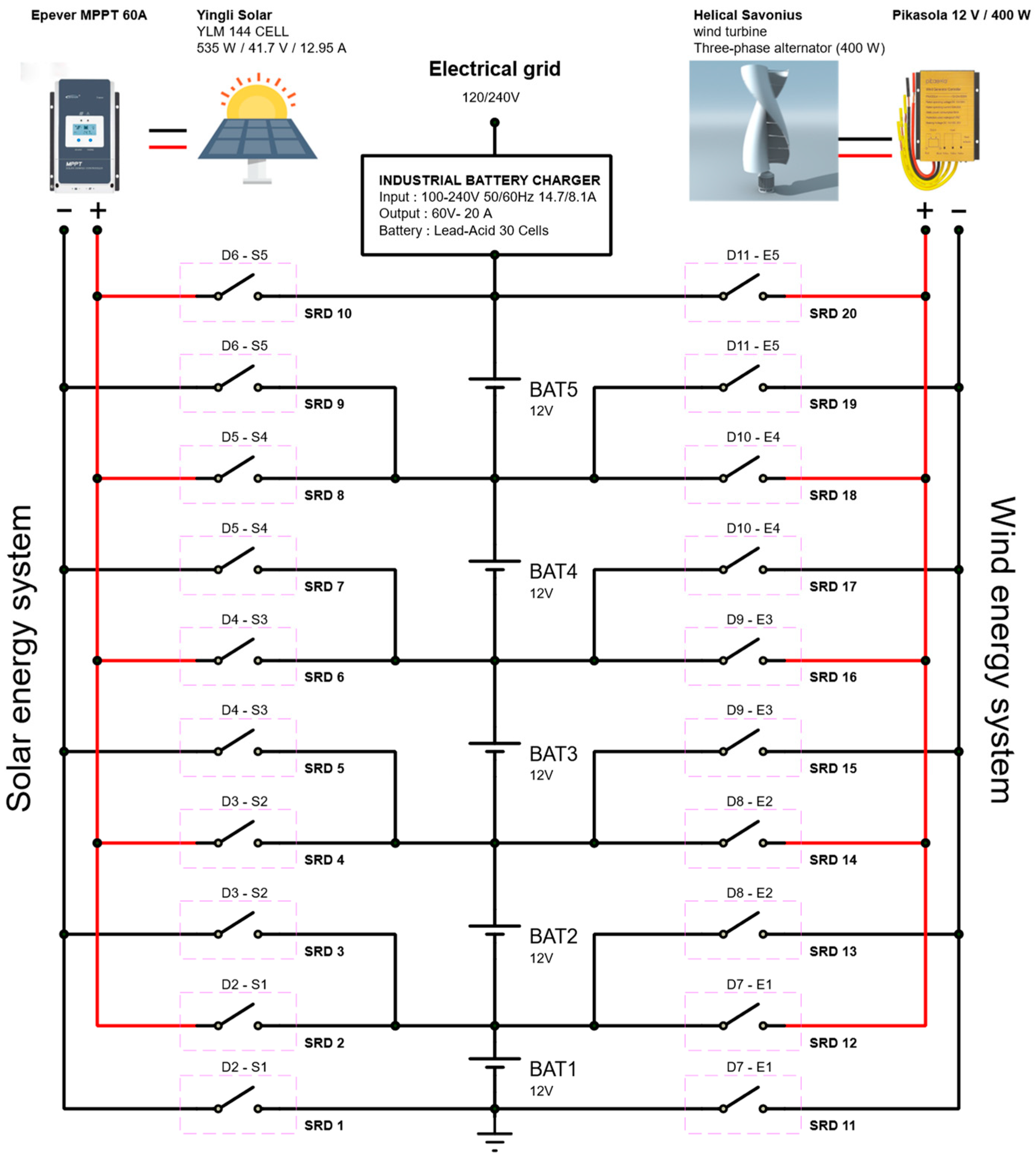
2.4. Charge Equalizer
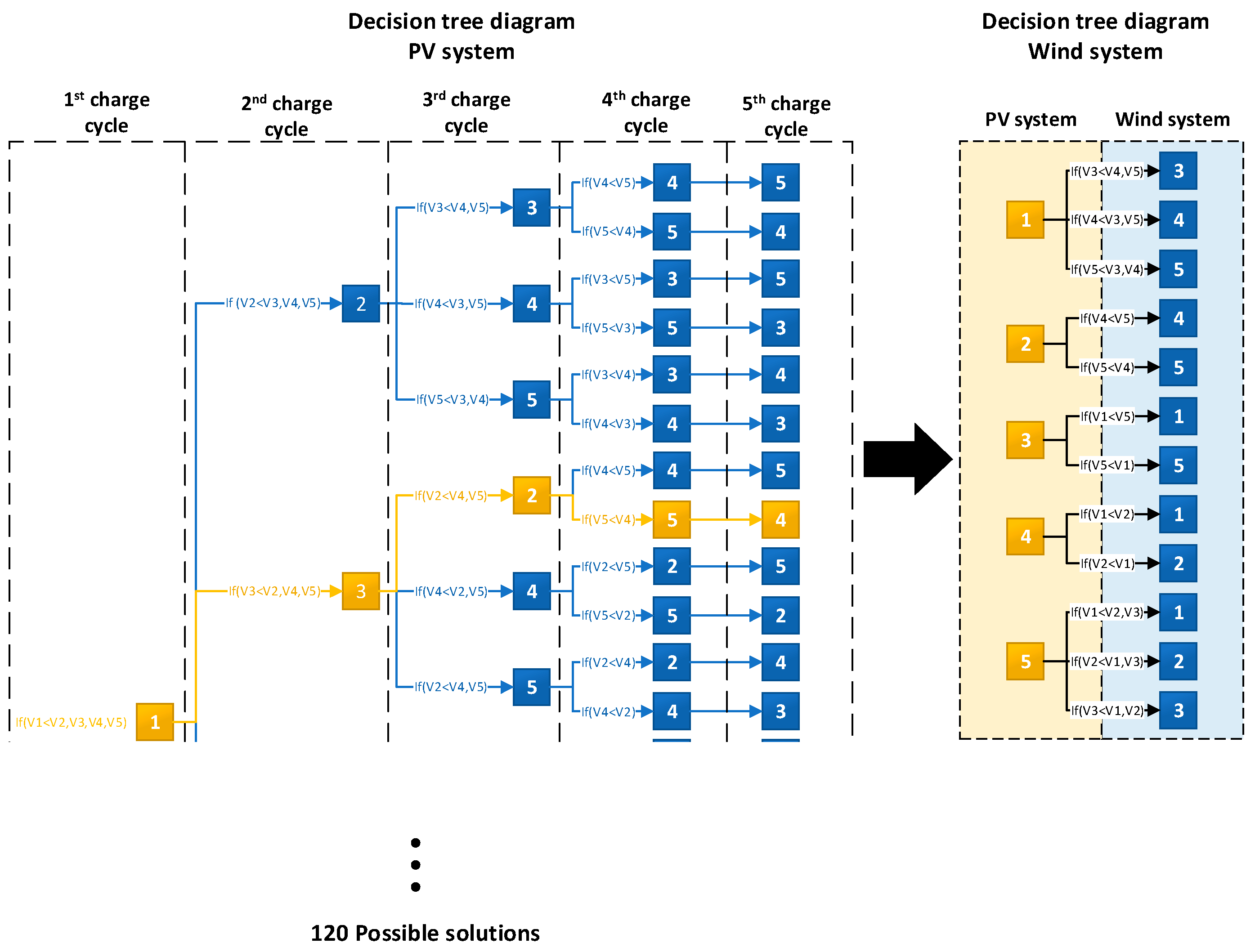
2.5. Algorithm Design for the Charge Equalization System
3. Results
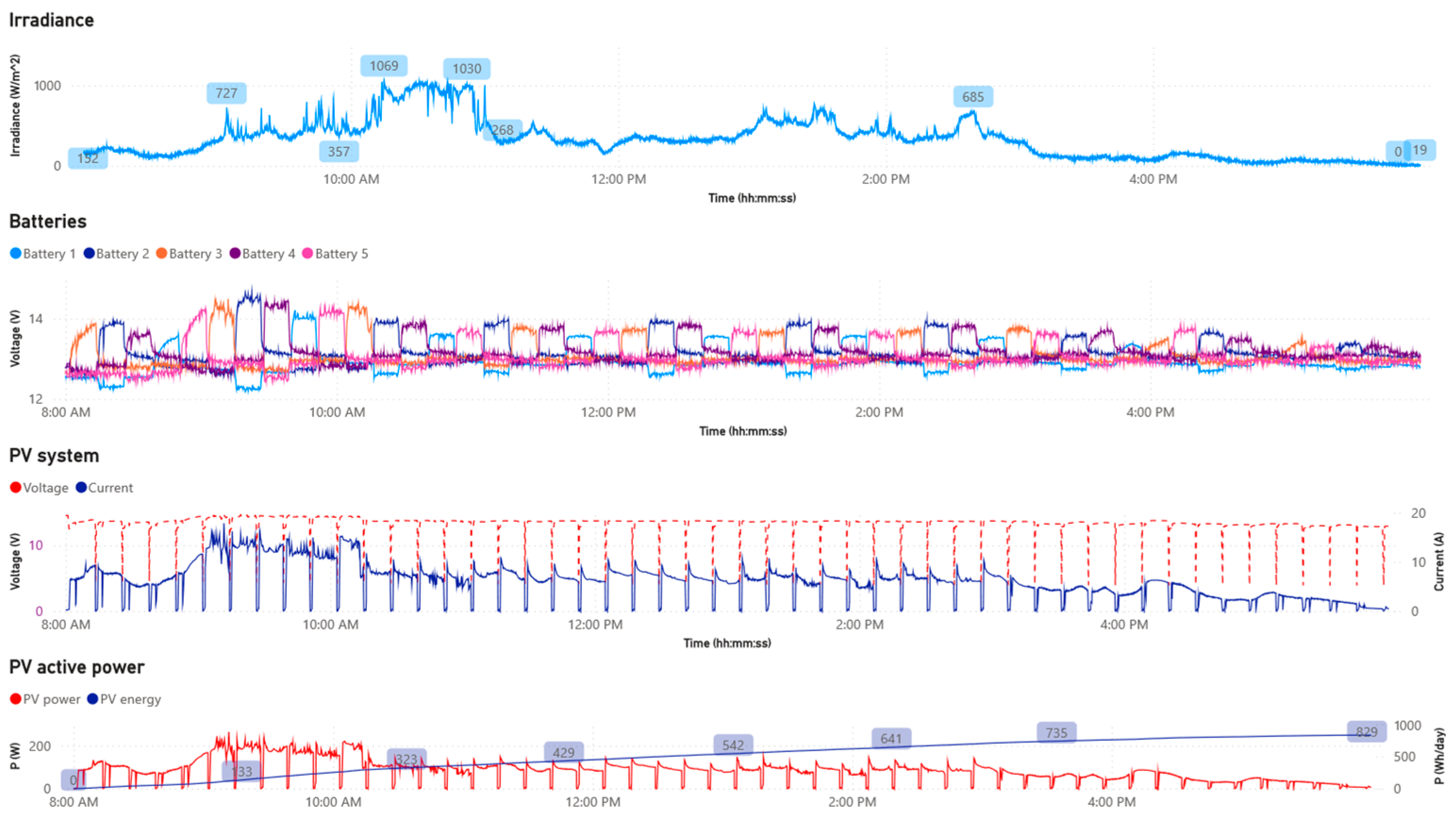
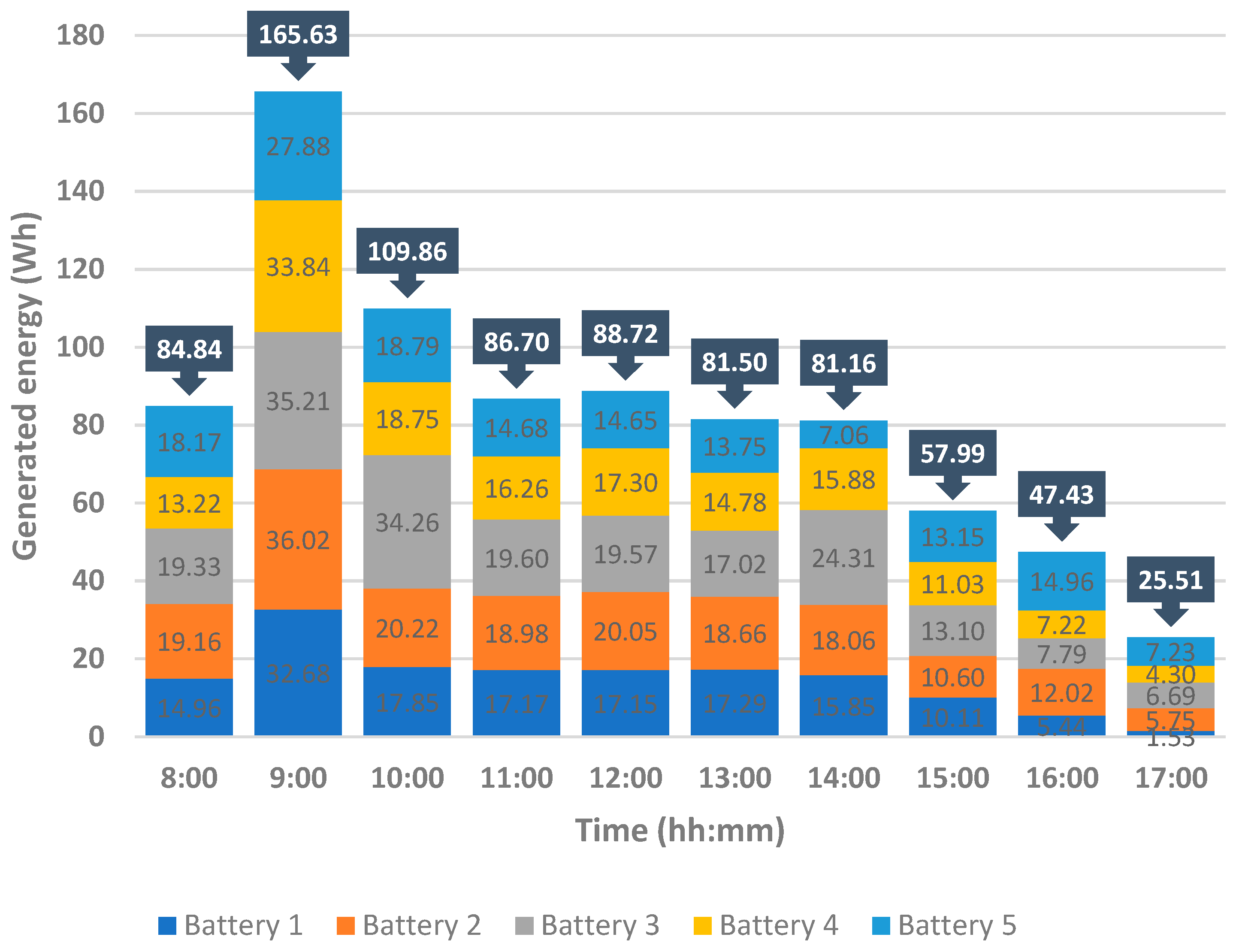
3.1. Performance Analysis of the Photovoltaic System While the EV Was Parked
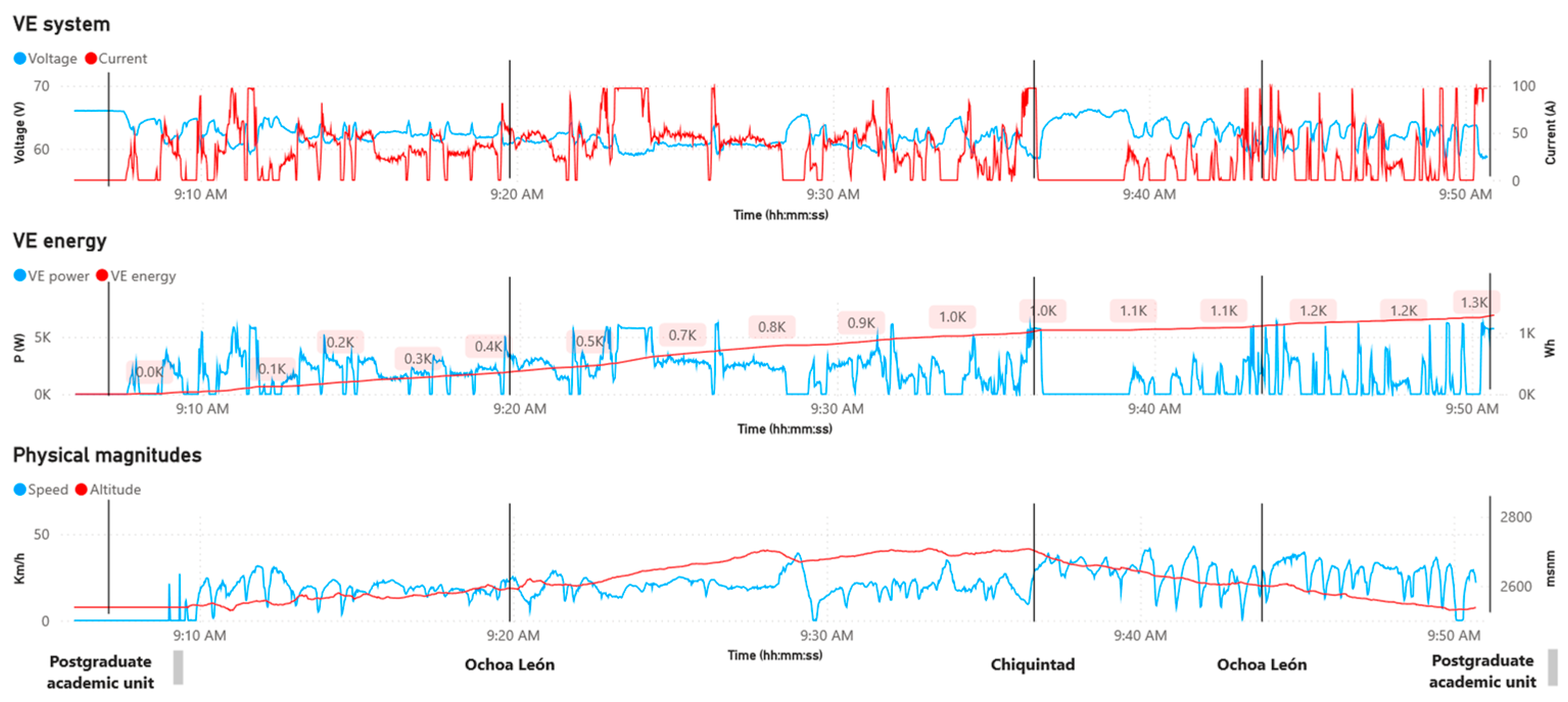
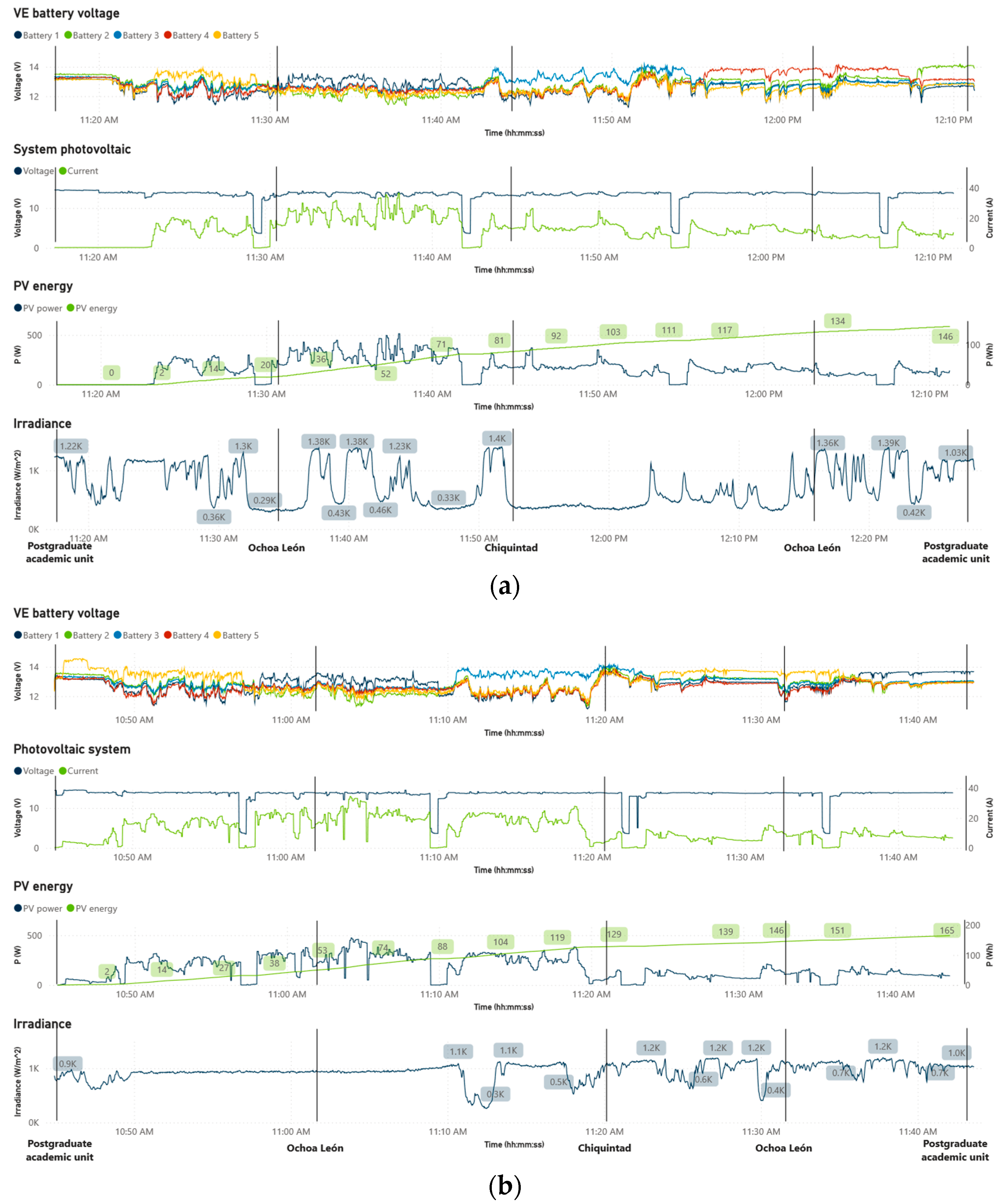
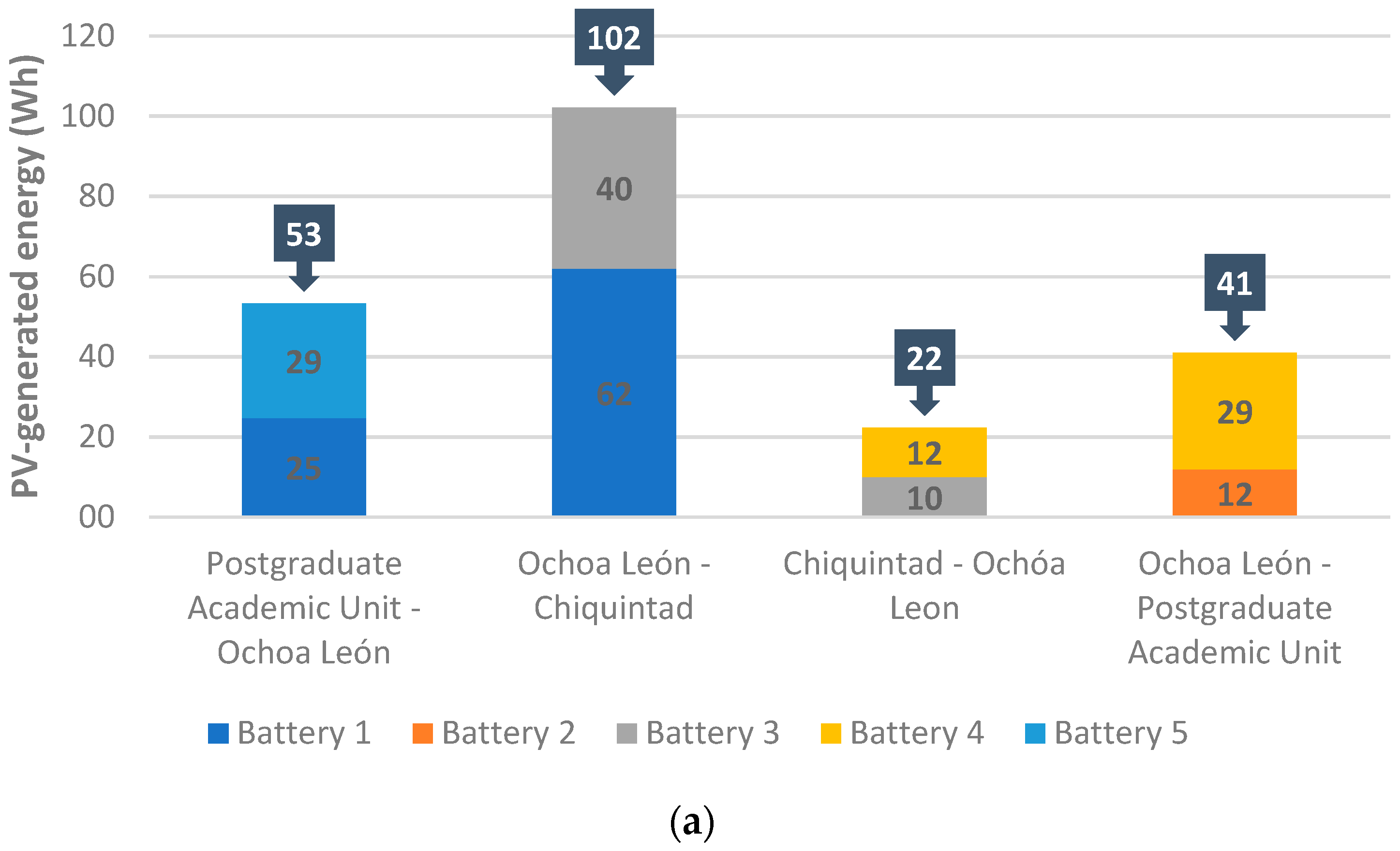
3.2. Performance Analysis of the Photovoltaic System during the EV’s Route
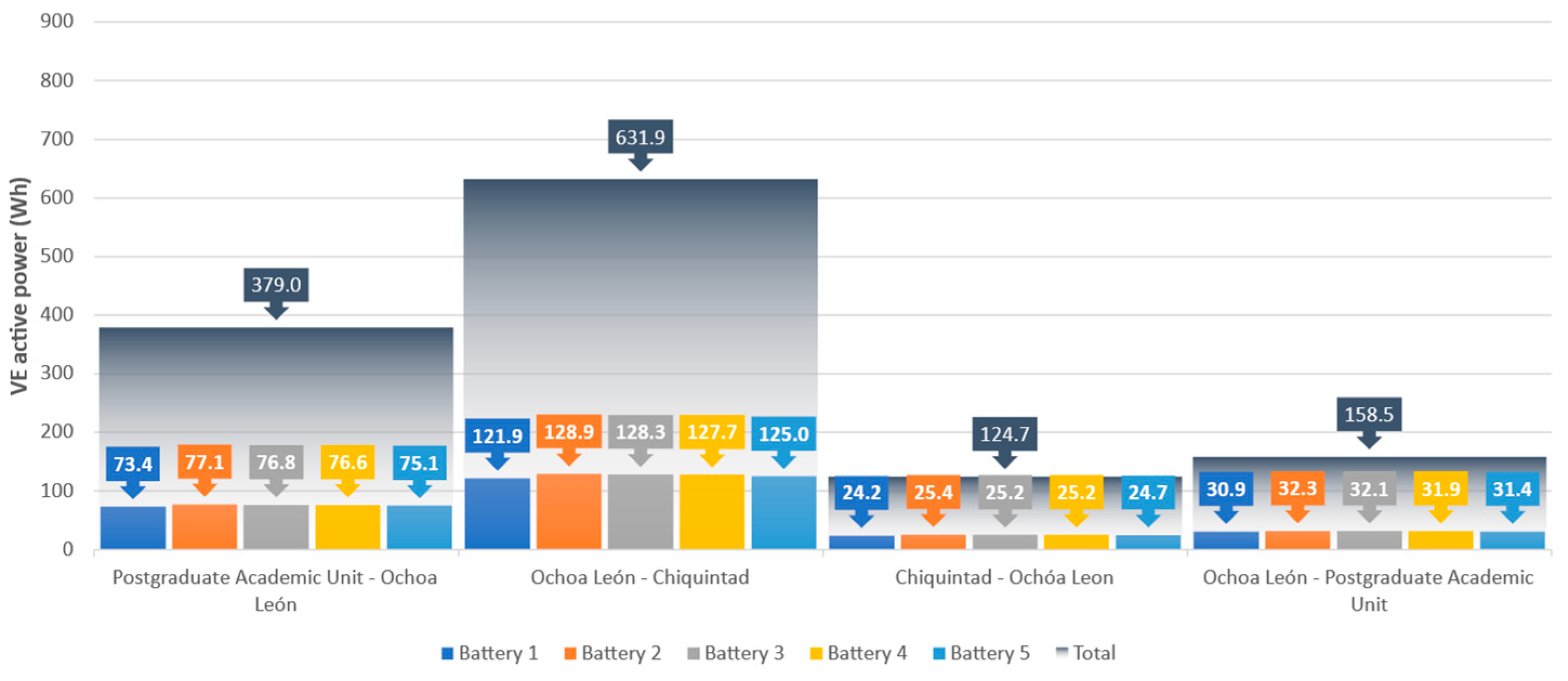
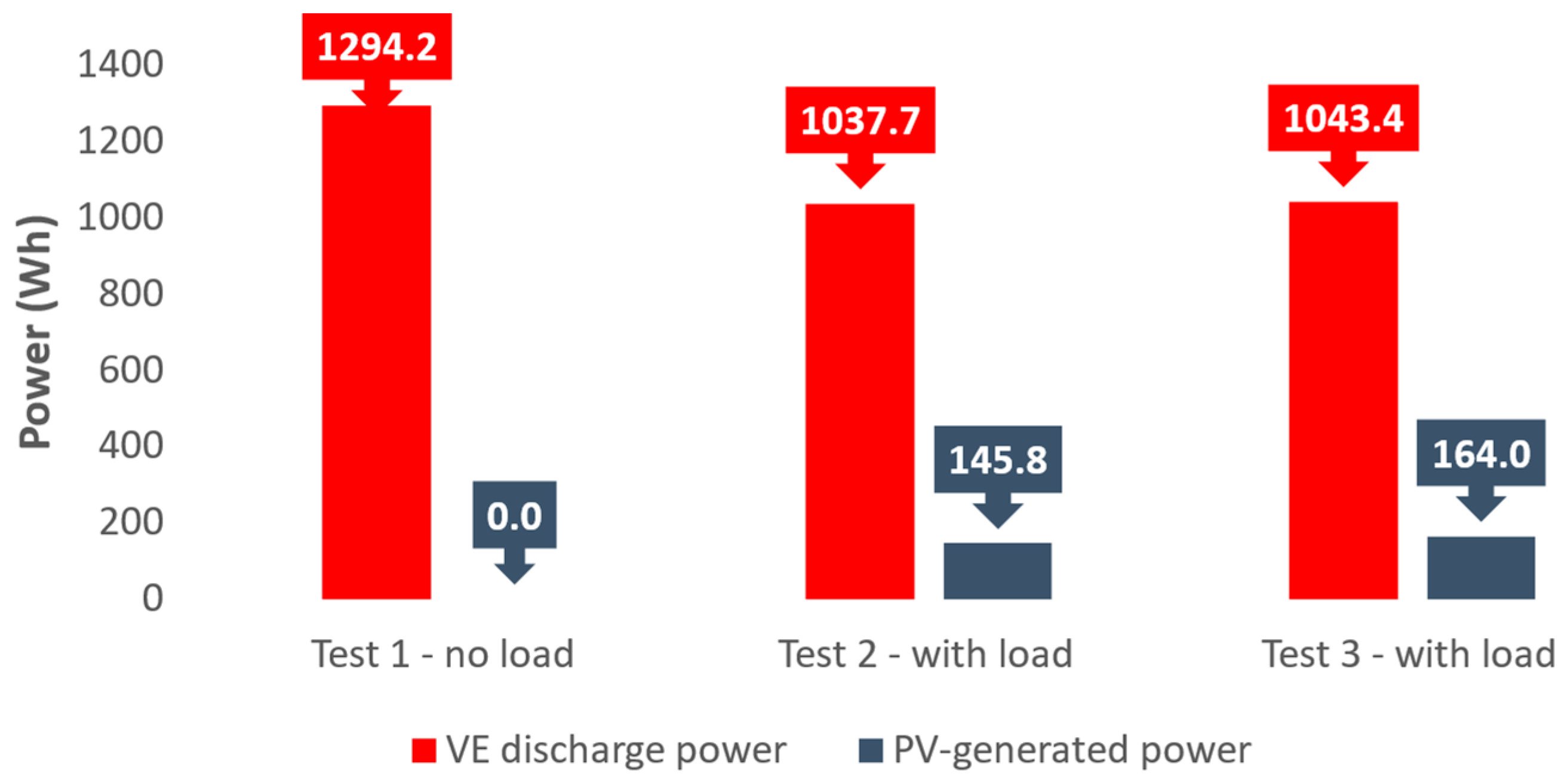
3.2.1. Analysis of the Energy Consumption of the EV in Motion without Additional Energy Input
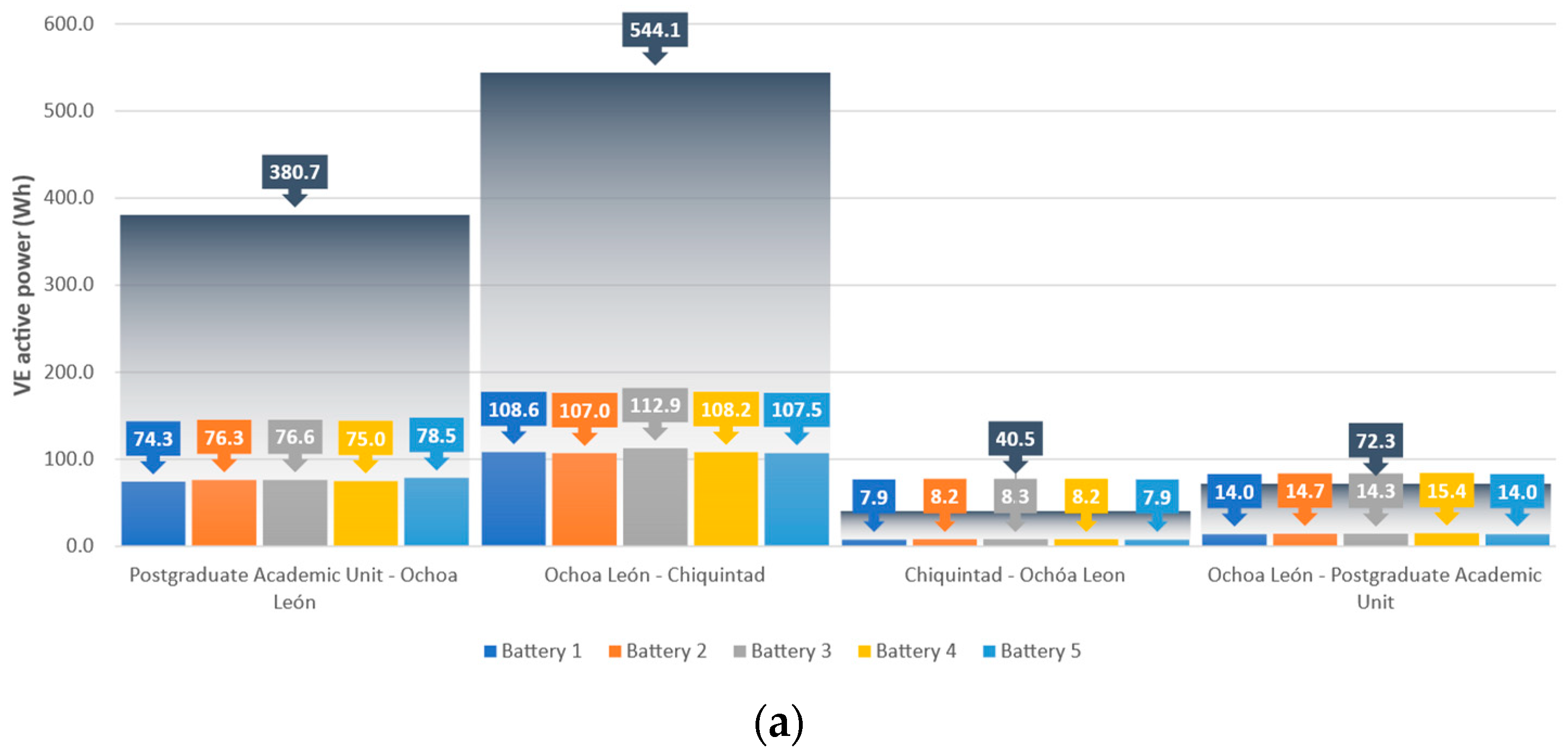
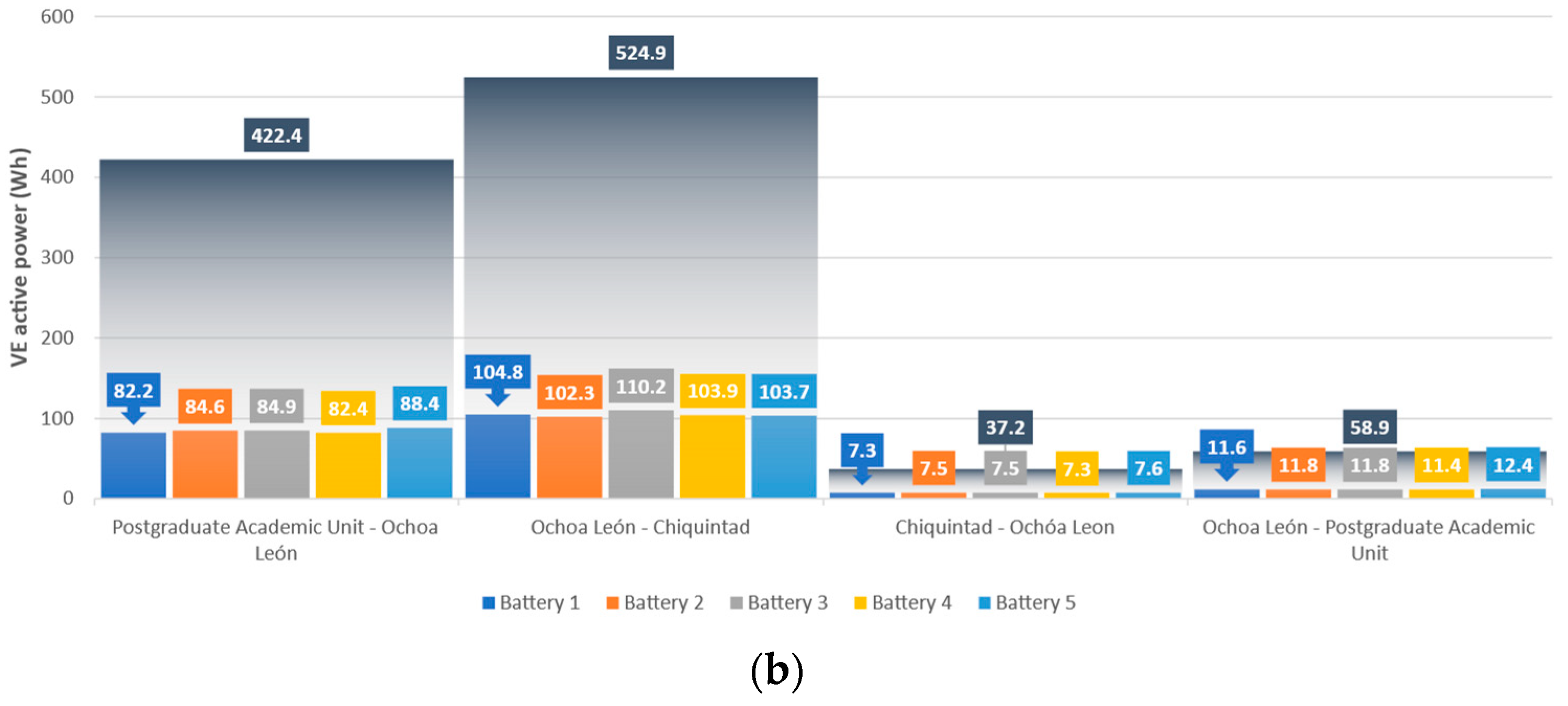
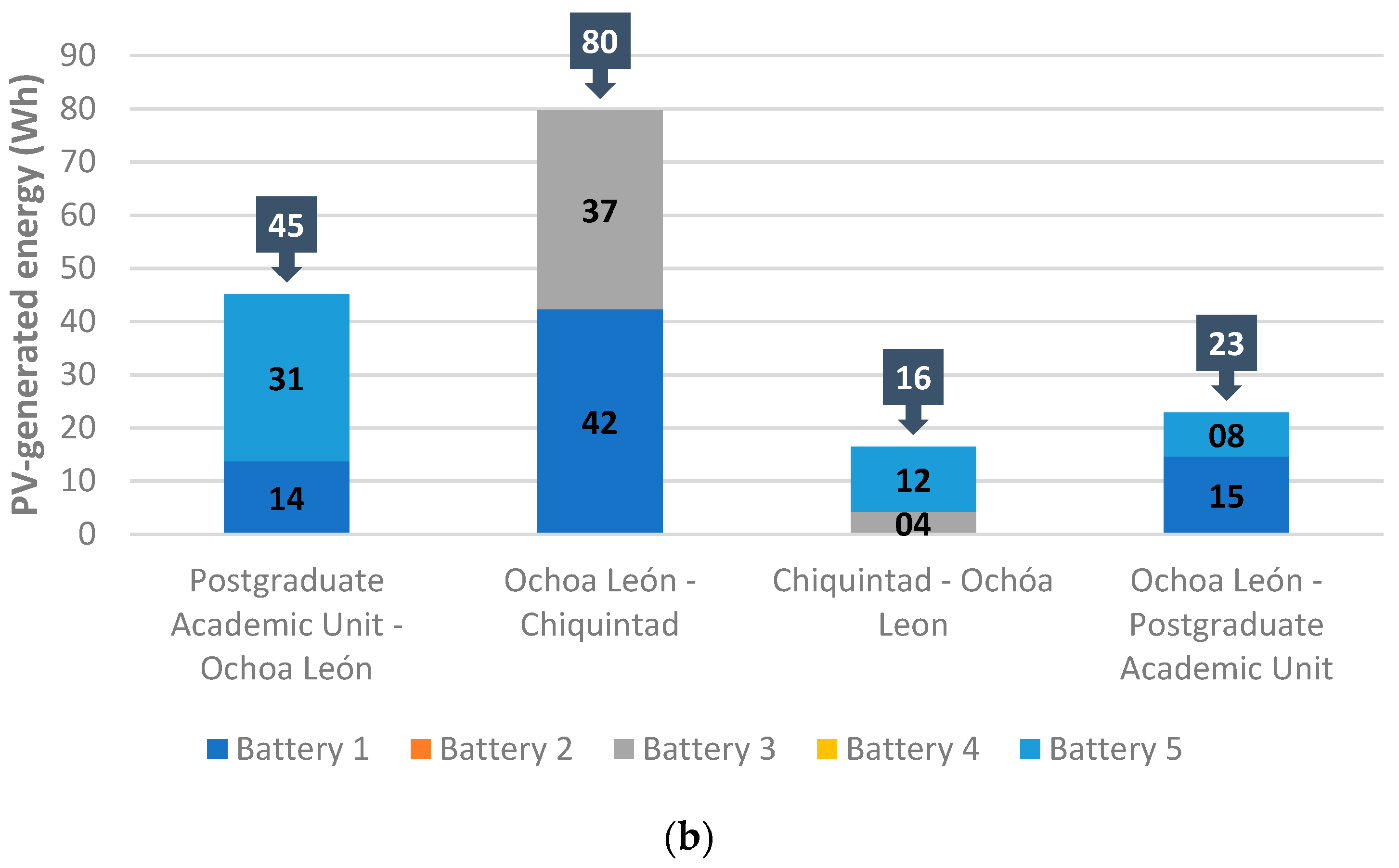
3.2.2. Analysis of the Energy Consumption of the EV in Motion with Additional Energy Input
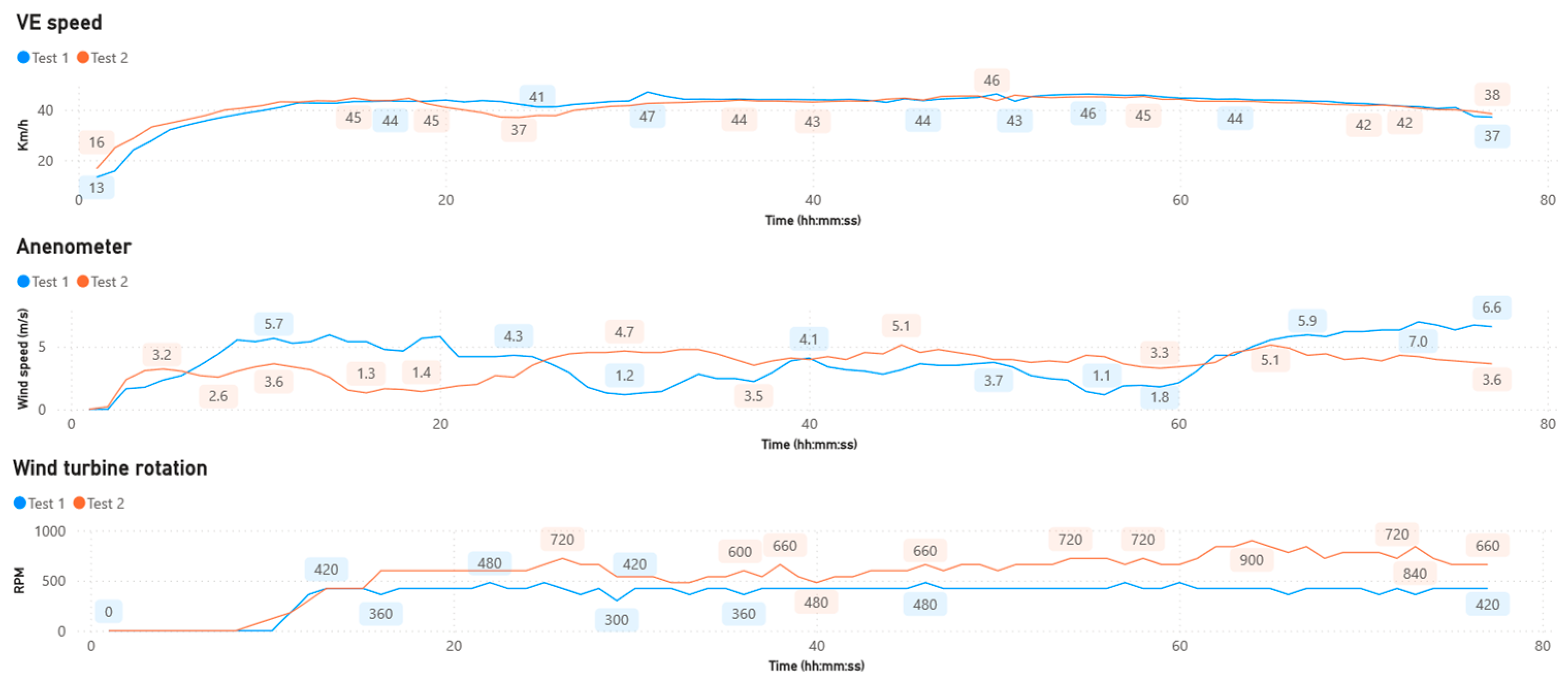
3.3. Wind Turbine Performance Data Analysis
3.4. Data Visualization on an IoT Platform
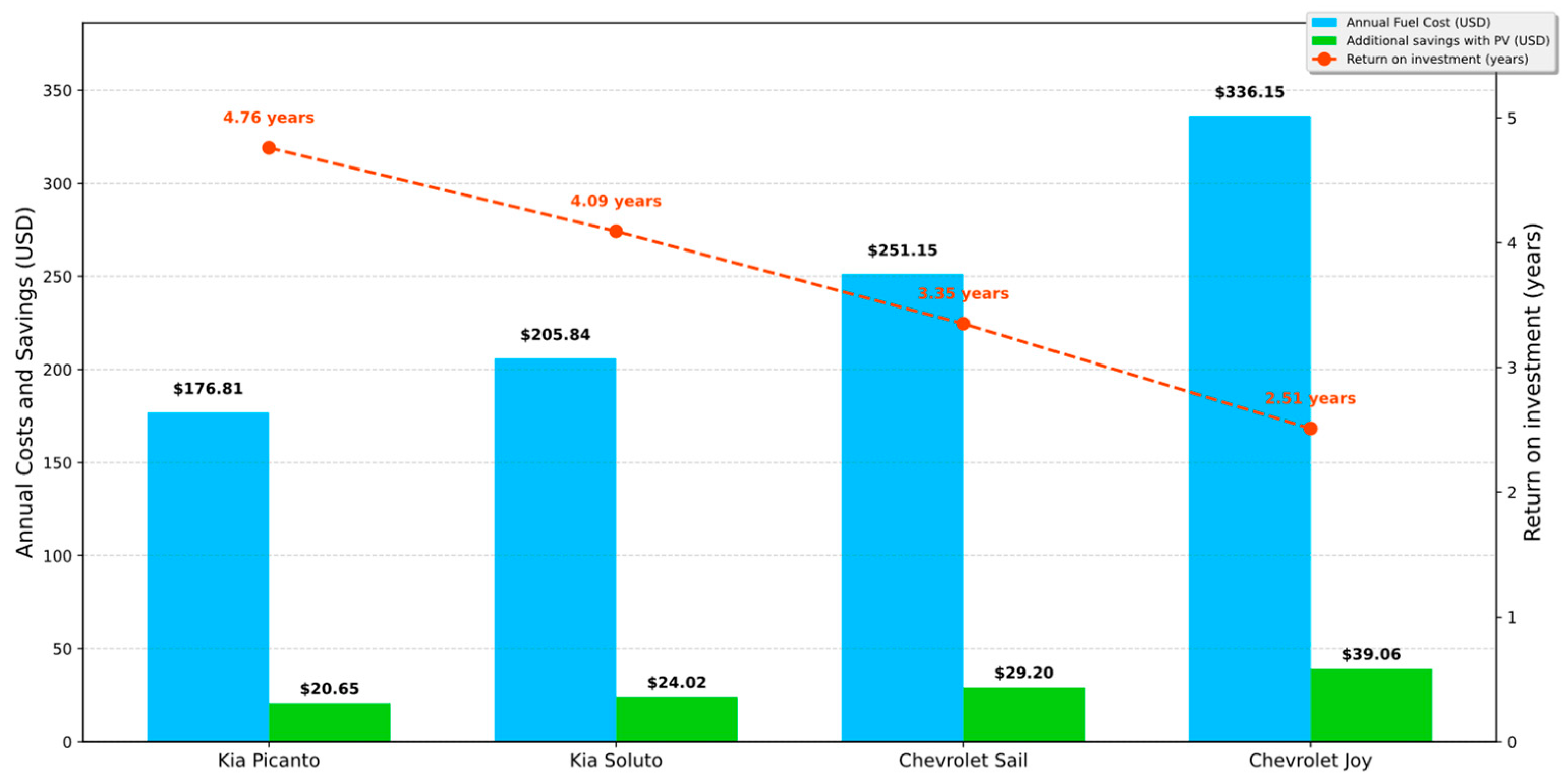
3.5. Cost Evaluation and Return on Investment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- UNFCCC. Paris Agreement; United Nations Bonn: Bonn, Germany, 2015. [Google Scholar]
- IEA. World Energy Balances. Available online: https://www.iea.org/data-and-statistics/data-product/world-energy-balances (accessed on 5 November 2023).
- Sheng, M.S.; Sreenivasan, A.V.; Sharp, B.; Du, B. Well-to-Wheel Analysis of Greenhouse Gas Emissions and Energy Consumption for Electric Vehicles: A Comparative Study in Oceania. Energy Policy 2021, 158, 112552. [Google Scholar] [CrossRef]
- ARCERNN. Estadística Anual y Multianual Del Sector Electrico Ecuatoriano 2023; 2023. Available online: https://www.controlrecursosyenergia.gob.ec/wp-content/uploads/downloads/2024/04/EstadisticaAnual2023-WEB-2.pdf (accessed on 10 May 2023).
- Maks Davis, M. Beyond Petroleum: A Look at the Impact of Electric Cars in the Three Main Cities of Ecuador. Estoa 2017, 6, 151–158. [Google Scholar] [CrossRef]
- IEA. Global EV Outlook 2022; IEA: Paris, France, 2022. [Google Scholar]
- Yang, W.; Liu, W.; Chung, C.Y.; Wen, F. Joint Planning of EV Fast Charging Stations and Power Distribution Systems with Balanced Traffic Flow Assignment. IEEE Trans. Industr. Inform. 2020, 17, 1795–1809. [Google Scholar] [CrossRef]
- McKinney, T.R.; Ballantyne, E.E.F.; Stone, D.A. Rural EV Charging: The Effects of Charging Behaviour and Electricity Tariffs. Energy Rep. 2023, 9, 2321–2334. [Google Scholar] [CrossRef]
- Reddy, V.J.; Hariram, N.P.; Maity, R.; Ghazali, M.F.; Kumarasamy, S. Sustainable Vehicles for Decarbonizing the Transport Sector: A Comparison of Biofuel, Electric, Fuel Cell and Solar-Powered Vehicles. World Electr. Veh. J. 2024, 15, 93. [Google Scholar] [CrossRef]
- Pasetti, M.; Longo, M.; Rinaldi, S.; Ferrari, P.; Sisinni, E.; Flammini, A. On the Sustainable Charging of Electric Vehicles in the Presence of Distributed Photovoltaic Generation. In Proceedings of the 2022 IEEE Sustainable Power and Energy Conference (iSPEC), Perth, Australia, 4–7 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar]
- Singh, A.; Nikhil, P.G.; Prakash Singh, J. Techno-Commercial Analysis of a Solar Powered Electric Vehicle Charging Station for Chennai, India. In Proceedings of the 2021 Fourth International Conference on Electrical, Computer and Communication Technologies (ICECCT), Erode, India, 15–17 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Sankar Rao, B.U.; Sumanth Prapulla, S.; Srinivasa Varma, P.; Ahammad, S.H. Development Of Fast Charging Technology For Electric Vehicles. In Proceedings of the 2022 IEEE 2nd Mysore Sub Section International Conference (MysuruCon), Mysuru, India, 16–17 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Diaz-Londono, C.; Motta, M.; Pareschi, D.; Gruosso, G. Utilization Analysis of Rapid and Ultra-Rapid Electric Vehicle Chargers in Europe. In Proceedings of the 2023 IEEE Vehicle Power and Propulsion Conference (VPPC), Milan, Italy, 23–27 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Cai, X.; Chen, L.; Wang, M. Current Status and Development Trend of Battery Changing Technology for Electric Passenger Vehicles. In Proceedings of the 2022 2nd International Conference on Electrical Engineering and Control Science (IC2ECS), Nanjing, China, 16–18 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 215–221. [Google Scholar]
- Xiao, J.; Quan, X.; Chen, S.; Gong, W.; Wu, X.; Mo, Y. Overview of Wireless Charging Positioning Guidance Technology for Electric Vehicles. In Proceedings of the 2023 International Conference on Electronics and Devices, Computational Science (ICEDCS), Marseille, France, 22–24 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 82–87. [Google Scholar]
- Ganne, A.; Sahu, L.K. Performance of Single-Stage and Dual-Stage EV Battery Chargers for G2V and V2G Operation. In Proceedings of the 2024 Third International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 18–29 January 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 486–491. [Google Scholar]
- Lee, K.Y.; Park, S. Reducing Charging Burden of Light Electric Vehicles by Integrated Photovoltaic Modules. In Proceedings of the 2022 IEEE Vehicle Power and Propulsion Conference (VPPC), Merced, CA, USA, 1–4 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Shpak, O.; Samotyy, V.; Dzelendzyak, U. Development of a Portable Charger for Electric Vehicles. In Proceedings of the 2023 IEEE 12th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Dortmund, Germany, 7–9 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 568–572. [Google Scholar]
- Schuss, C.; Fabritius, T.; Eichberger, B.; Rahkonen, T. Energy-Efficient Routing of Electric Vehicles with Integrated Photovoltaic Installations. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Lee, K.Y.; Kremer, P.; Prinz, A.; Park, S.; Göhlich, D.; Park, S. Assessing Effectiveness of Integrated Photovoltaic Panels on Light Electric Vehicles. IEEE Trans. Veh. Technol. 2024, 73, 4589–4598. [Google Scholar] [CrossRef]
- Kutter, C.; Alanis, L.E.; Neuhaus, D.H.; Heinrich, M. Yield Potential of Vehicle Integrated Photovoltaics on Commercial Trucks and Vans. In Proceedings of the 38th European PV Solar Energy Conference and Exhibition, Online, 6–10 September 2021. [Google Scholar]
- Diahovchenko, I.; Petrichenko, L.; Borzenkov, I.; Kolcun, M. Application of Photovoltaic Panels in Electric Vehicles to Enhance the Range. Heliyon 2022, 8, e12425. [Google Scholar] [CrossRef] [PubMed]
- Centeno Brito, M.; Santos, T.; Moura, F.; Pera, D.; Rocha, J. Urban Solar Potential for Vehicle Integrated Photovoltaics. Transp. Res. D Transp. Environ. 2021, 94, 102810. [Google Scholar] [CrossRef]
- Srinivas, T.A.; Mohamed, M.J.S.; Saravanan, A.; Sukania, P.; Pathani, A.; Sekar, K. Smart Highway Technique Using Wind Turbine with Vertical Axis (VAWT). In Proceedings of the 2022 International Conference on Power, Energy, Control and Transmission Systems (ICPECTS), Chennai, India, 8–9 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar]
- Al-Aqel, A.A.; Lim, B.K.; Mohd Noor, E.E.; Yap, T.C.; Alkaff, S.A. Potentiality of Small Wind Turbines along Highway in Malaysia. In Proceedings of the 2016 International Conference on Robotics, Automation and Sciences (ICORAS), Melaka, Malaysia, 5–6 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Yang, Q.; Yan, F.; Zhang, S.; Li, S.; Yin, C.; Wang, Y. Vertical Axis Wind Power Generation System Based on Wind Energy Characteristics of Highway Vehicle Bypass Flow. In Proceedings of the 2022 International Conference on Knowledge Engineering and Communication Systems (ICKES), Chickballapur, India, 8–9 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar]
- Kunkel, L.C.; Hall, D.M. Improving Site Assessment Tools in Emerging Technologies: The Case of Highway Vertical-Axis Wind Turbines in the United States. Energy Res. Soc. Sci. 2020, 64, 101456. [Google Scholar] [CrossRef]
- Morgin, F.N.; Fotso, B.M.; Talawo, R.C.; Fogue, M. AERODYNAMIC ANALYSIS OF AN ELECTRIC VEHICLE EQUIPPED WITH HORIZONTAL AXIS SAVONIUS WIND TURBINES. Int. J. Recent. Trends Eng. Res. 2019, 5, 17–26. [Google Scholar] [CrossRef]
- Andias, R.; Mohd, S.; Zulkafli, F.; Didane, D.H. Simulation Study of Wind Turbine System for Electric Powered Vehicle. Int. J. Integr. Eng. 2020, 12, 76–81. [Google Scholar] [CrossRef]
- Sahani, R.; Daga, M.; Jamatia, I.; Kumar, P.; Tripathi, S.L. Design of a Self-Charging Electric Vehicle with Embedded Multiple Natural Energy Sources. In Proceedings of the 2023 IEEE Devices for Integrated Circuit (DevIC), Kalyani, India, 7–8 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 296–301. [Google Scholar]
- Gopinath, C.; Karthikeyan, P.; Srihari, R.; Yuvaraj, M. Integrated Renewable Energy Charging System for Electric Vehicles. In Proceedings of the 2023 9th International Conference on Electrical Energy Systems (ICEES), Chennai, India, 23–25 March 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 58–63. [Google Scholar]
- Khan, D.; Khan, S.; Amir Ayaz, M.; Khan, A. Analysis of Hybrid Electric Vehicle Operated by Wind and Solar Energy. Int. J. Adv. Nat. Sci. Eng. Res. 2023, 11, 20–26. [Google Scholar]
- Sotamba-Chimbo, E.A.; Cobos-Torres, J.C.; Andrade-Mena, G.I. Proyecto académico de electromovilidad neta cero para docentes de la Universidad Católica de Cuenca, a través de ABP. Conrado 2023, 19, 109–124. [Google Scholar]
- Angamarca-Avendaño, D.-A.; Saquicela-Moncayo, J.-F.; Capa-Carrillo, B.-H.; Cobos-Torres, J.-C. Charge Equalization System for an Electric Vehicle with a Solar Panel. Energies 2023, 16, 3360. [Google Scholar] [CrossRef]
- Reinoso, L.; Ortega, J. Incremento de La Autonomía de Un Vehículo Eléctrico Dayang CHOK-S a Través de La Utilización de Paneles Solares. Novasinergia Rev. Digit. Cienc. Ing. Tecnol. 2020, 3, 40–46. [Google Scholar] [CrossRef]
- Sugimoto, H. Feasibility Study of Rechargeable Flexible Tandem Solar Cells for VIPV Applications Under Realistic Environments. In Proceedings of the 2023 Middle East and North Africa Solar Conference (MENA-SC), Dubai, United Arab Emirates, 15–18 November 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–4. [Google Scholar]
- Sinuraya, A.; Sinaga, D.H.; Simamora, Y.; Wahyudi, R. Solar Photovoltaic Application for Electric Vehicle Battery Charging. J. Phys. Conf. Ser. 2022, 2193, 012075. [Google Scholar] [CrossRef]
- Mil’shtein, S.; Zinaddinov, M.; Asthana, D.N.; Scheminger, J. Design and Testing of Solar/Electric Cart. J. Phys. Conf. Ser. 2021, 1921, 012021. [Google Scholar] [CrossRef]
- Rahman, A.; Myo Aung, K.; Ihsan, S.; Raja Ahsan Shah, R.M.; Al Qubeissi, M.; Aljarrah, M.T. Solar Energy Dependent Supercapacitor System with ANFIS Controller for Auxiliary Load of Electric Vehicles. Energies 2023, 16, 2690. [Google Scholar] [CrossRef]
- Suyal, S.; Saxena, A.R. Active Charge Equalization of an ‘M × n’ Battery Stack in Electric Vehicles during Charging, Discharging, or Isolated Condition. In Proceedings of the 2022 IEEE 10th Power India International Conference (PIICON), Delhi, India, 25–27 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Description |
|---|---|
| Electric vehicle | Dayang Chok S2. Dimensions: 2.54 × 1.39 × 1.59 mts. Battery: Five 6-EVF-150 12 V/150 Ah. |
| Photovoltaic panel | Yingli Solar. YLM 144 CELL-535 W/41.7 V/12.95 A |
| Solar charge controller | Epever MPPT 60 A/48 V–36 V–24 V–12 V Auto/4500 W. |
| Three-phase alternator | Hyuduo/AVAN 400 W. |
| Wind charge controller | Pikasola 12 V–24 V/400 W. |
| Solar Energy System | Wind Energy System |
|---|---|
| Battery 1 | Battery 3 |
| Battery 4 | |
| Battery 5 | |
| Battery 2 | Battery 4 |
| Battery 5 | |
| Battery 3 | Battery 1 |
| Battery 5 | |
| Battery 4 | Battery 1 |
| Battery 2 | |
| Battery 5 | Battery 1 |
| Battery 2 | |
| Battery 3 |
| Battery No. | Minimum Value (V) | Percentile 25 (V) | Median (V) | Percentile 75 (V) | Maximum Value (V) |
|---|---|---|---|---|---|
| Battery 1 | 12.18 | 12.75 | 12.86 | 12.94 | 14.2 |
| Battery 2 | 12.54 | 12.94 | 13.07 | 13.17 | 14.65 |
| Battery 3 | 12.62 | 12.92 | 12.97 | 13.05 | 14.48 |
| Battery 4 | 12.58 | 12.98 | 13.09 | 13.2 | 14.45 |
| Battery 5 | 12.42 | 12.89 | 12.96 | 13.03 | 14.3 |
| Item | Cost (USD) |
|---|---|
| VE aluminum structure | 40.00 |
| Wind system (Savonius turbine, three-phase alternator, wind load controller) | 200.00 |
| Photovoltaic system (photovoltaic panel, solar charge controller) | 400.00 |
| Microcontrollers and sensors | 100.00 |
| Control and power PCB | 50.00 |
| Other (relays, connectors, wiring, etc.) | 150.00 |
| Total (USD) | 940.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angamarca-Avendaño, D.-A.; Flores-Vázquez, C.; Cobos-Torres, J.-C. A Photovoltaic and Wind-Powered Electric Vehicle with a Charge Equalizer. Energies 2024, 17, 4665. https://doi.org/10.3390/en17184665
Angamarca-Avendaño D-A, Flores-Vázquez C, Cobos-Torres J-C. A Photovoltaic and Wind-Powered Electric Vehicle with a Charge Equalizer. Energies. 2024; 17(18):4665. https://doi.org/10.3390/en17184665
Chicago/Turabian StyleAngamarca-Avendaño, Darwin-Alexander, Carlos Flores-Vázquez, and Juan-Carlos Cobos-Torres. 2024. "A Photovoltaic and Wind-Powered Electric Vehicle with a Charge Equalizer" Energies 17, no. 18: 4665. https://doi.org/10.3390/en17184665