
Microcontroller-Based Embedded System for the Diagnosis of Stator Winding Faults and Unbalanced Supply Voltage of the Induction Motors


Abstract
:1. Introduction
- (1)
- An analysis of the possibility of using and the proposal of the concept of an embedded fault diagnosis system based on a low-cost ARM Cortex-M4 core microcontroller to extract the symptoms of IM stator winding faults and unbalanced supply voltage, including the comparison of the results with a high-end solution;
- (2)
- A detailed description of the process of setting up diagnostic signal measurement and acquisition using low-cost microcontrollers, which may serve as a guide for various embedded system applications;
- (3)
- A detailed analysis of the effect of an ITSC in the stator winding and an unbalanced supply voltage of the IM drive on the waveform of the voltage induced in the measuring coil by the axial flux;
- (4)
- A detailed analysis of the effect of an ITSC in the stator winding and an unbalanced supply voltage of the IM drive on the FFT spectrum of the voltage induced in the measuring coil by the axial flux;
- (5)
- An analysis of the possibility of distinguishing between ITSC in the stator winding and an unbalanced supply voltage of the IM drive based on symptoms characteristic of these abnormal conditions;
- (6)
- A proposal for future research and plans to improve and develop the embedded diagnostic system, including reference to current trends related to the Industry 4.0 paradigm.
2. Experimental Setup
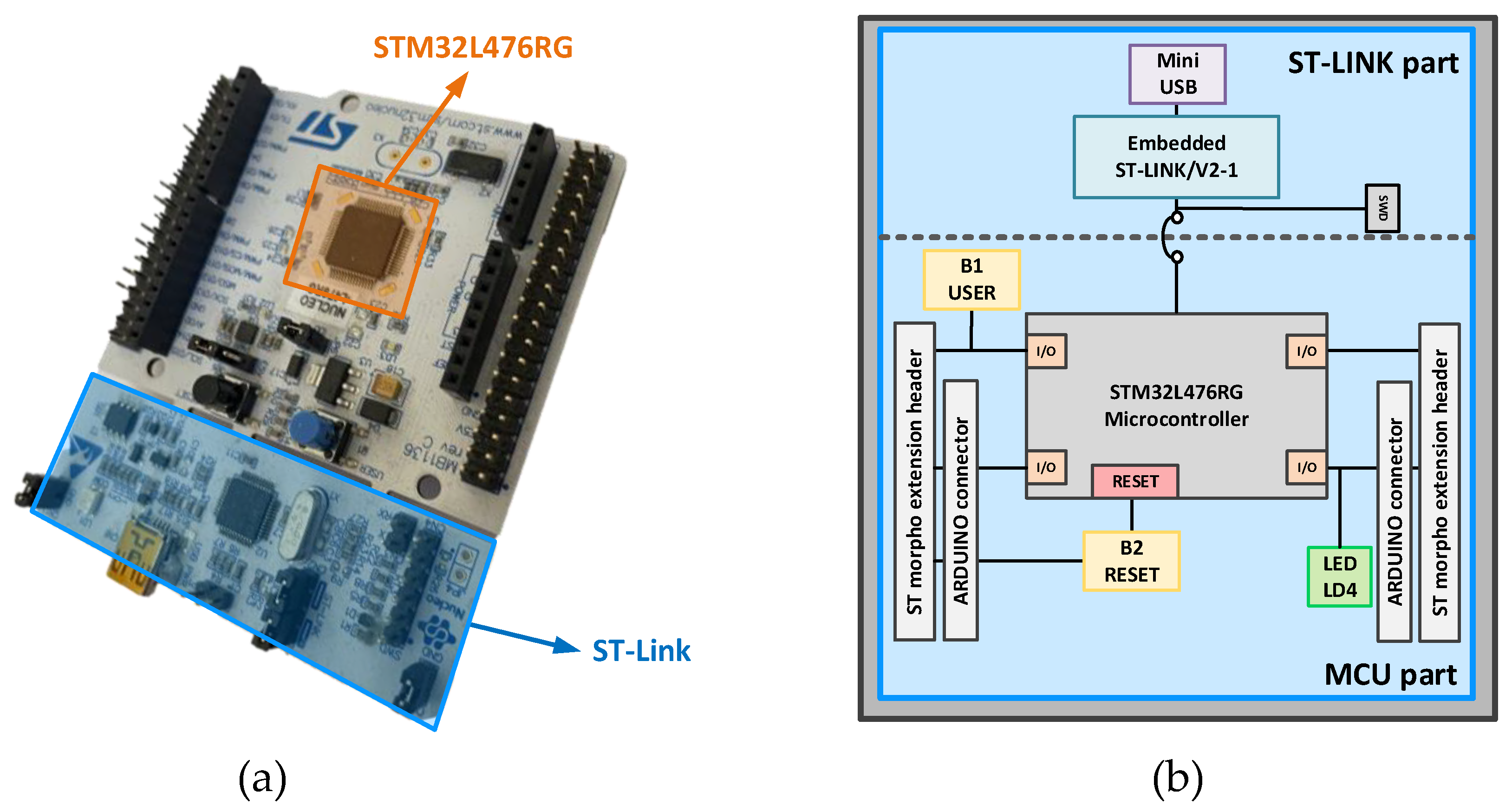
2.1. Characteristics of the Development Board and Microcontroller Used
2.2. Motor Test Bench
2.3. Details of the Developed Microcontroller-Based Fault Diagnosis System
3. Configuration and Verification of the Data Acquisition Process
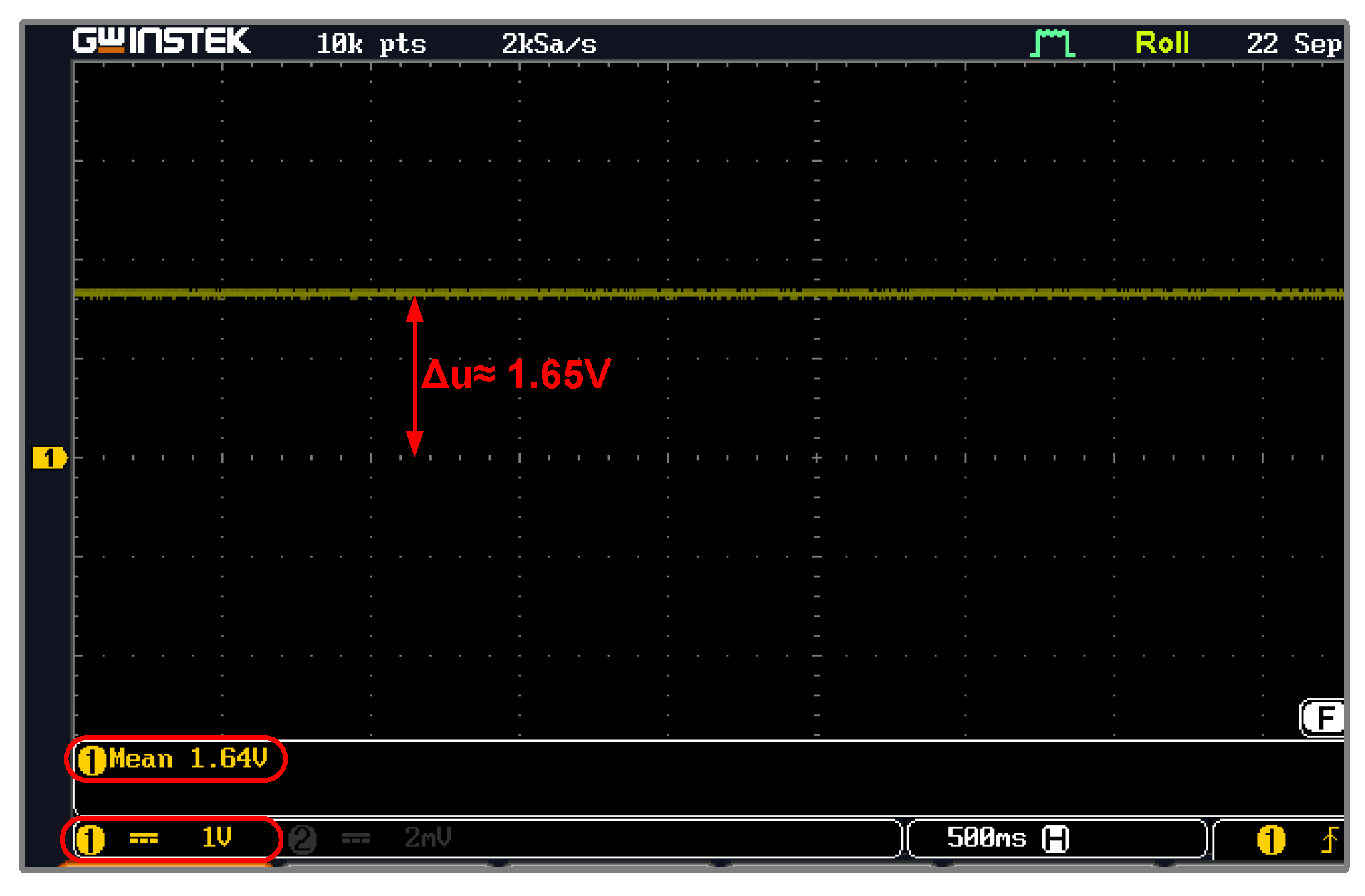
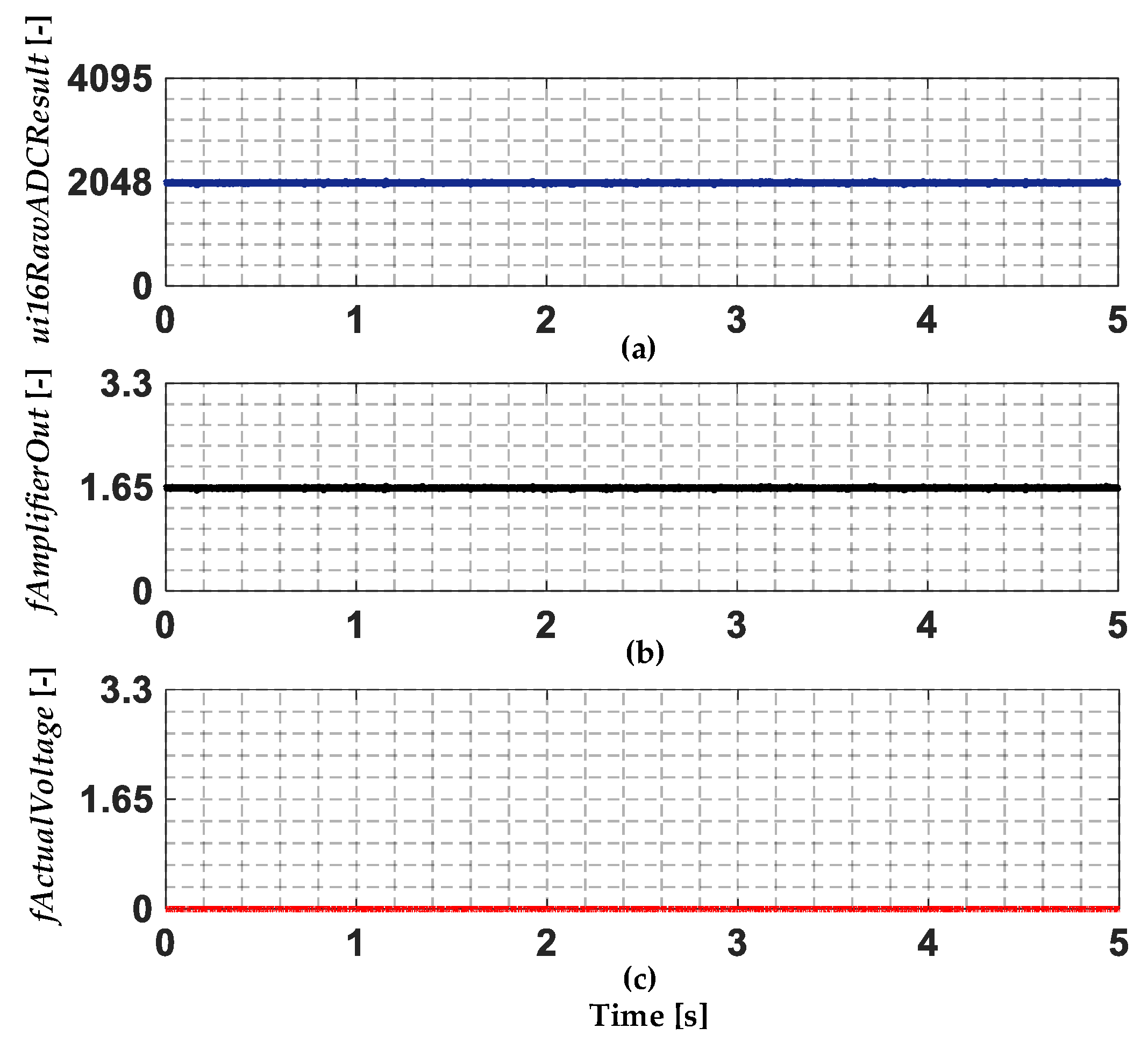
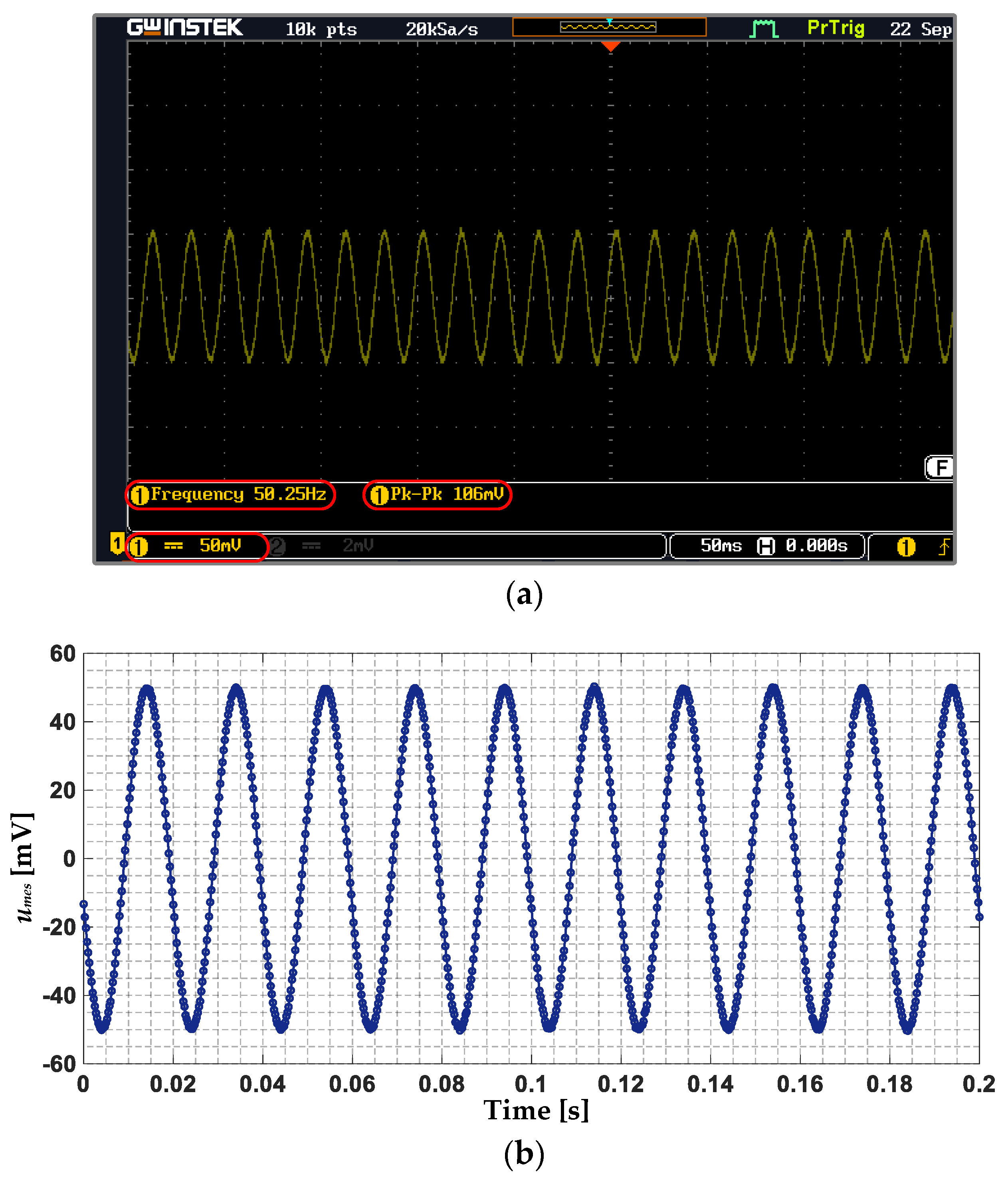
3.1. Configuration of the Measurement and Data Acquisition Process
3.2. Verification of the Measurement and Data Acquisition Process
4. ITSC and Unbalanced Supply Voltage Symptom Extraction Based on the Voltage Inducted by Axial Flux
4.1. Stator Winding Faults (ITSCs)
- fs—fundamental frequency of the supply voltage;
- fr—rotational frequency;
- pp—number of pole pairs;
- s—slip;
- n—1, 3, 5, …, 2pp − 1;
- k—consecutive positive integers (1, 2, 3 …).
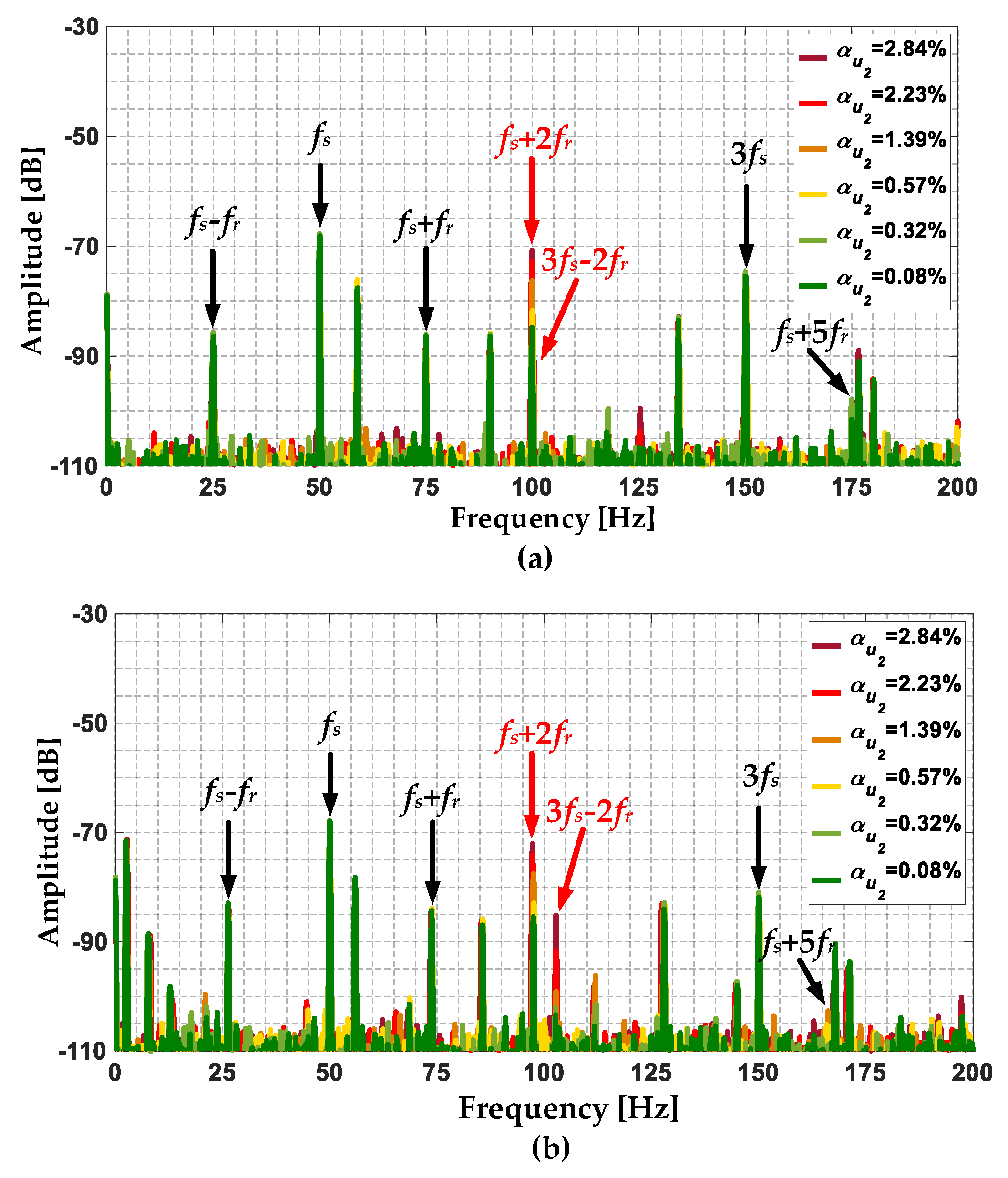
4.2. Unbalanced Supply Voltage
4.3. Influence of the Power Supply Method on the Amplitude Increase of the Selected Harmonics
4.4. Discussion of the Key Results and Plans for Future Research and Development
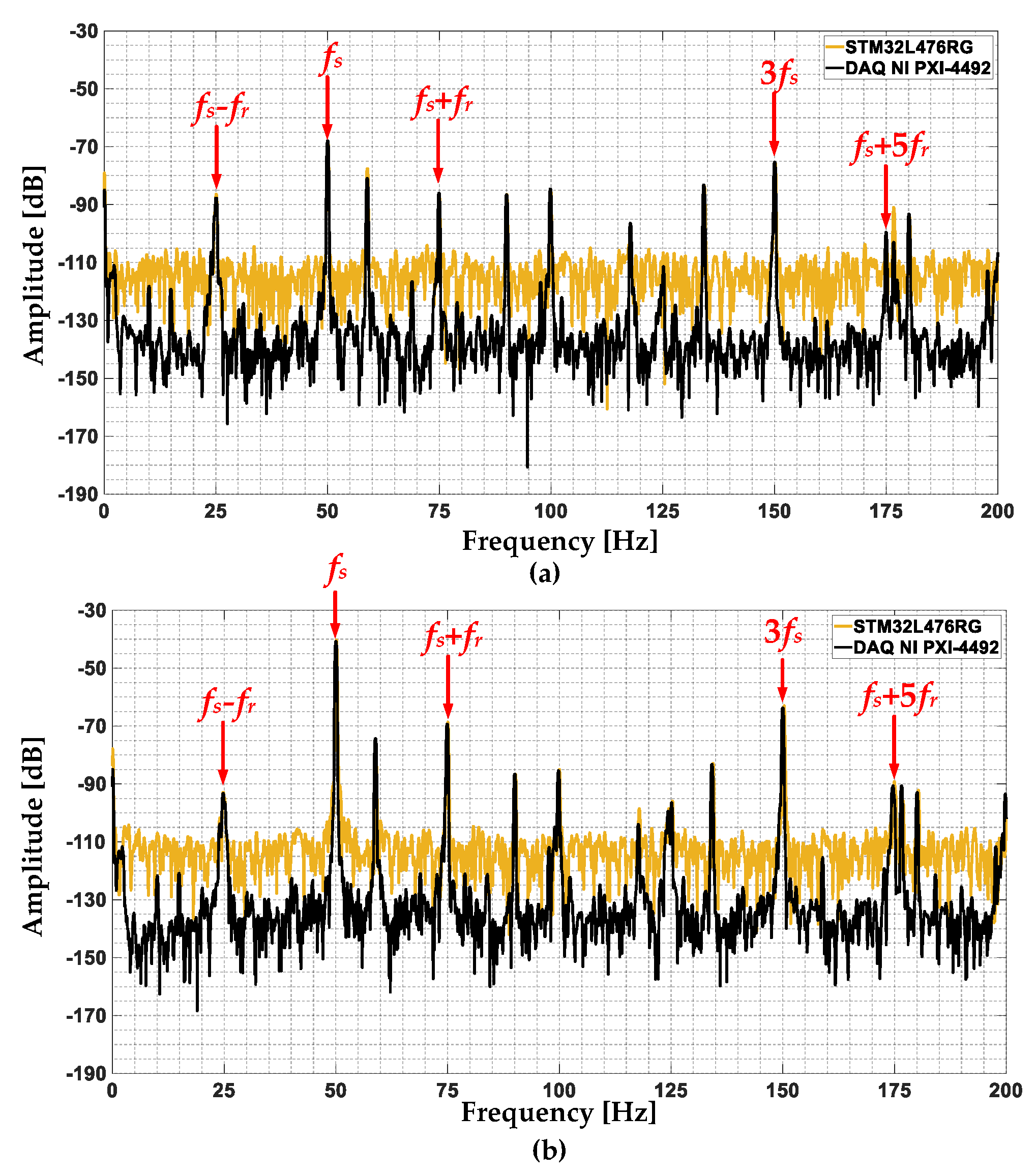
- The results of the measurement and signal acquisition process performed using the developed embedded system based on the STM32L476RG microcontroller did not differ from the results obtained using the high-end PXIe-4492 DAQ measurement card by NI;
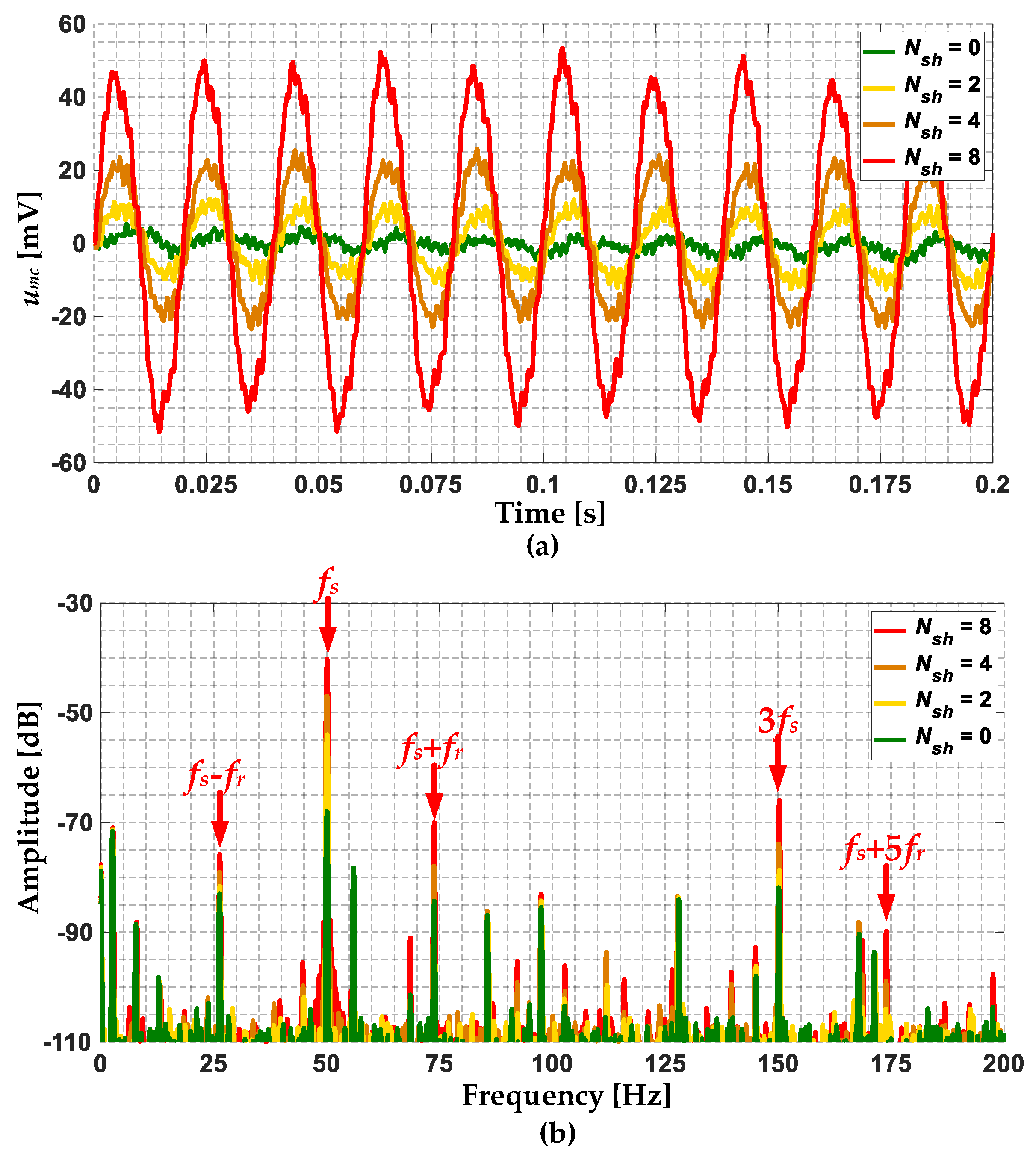
- The ITSC in the IM stator winding resulted in a significant increase in the amplitude of the umc regardless of the level of the load torque. The greater the severity of the fault, the greater the increase in amplitude;
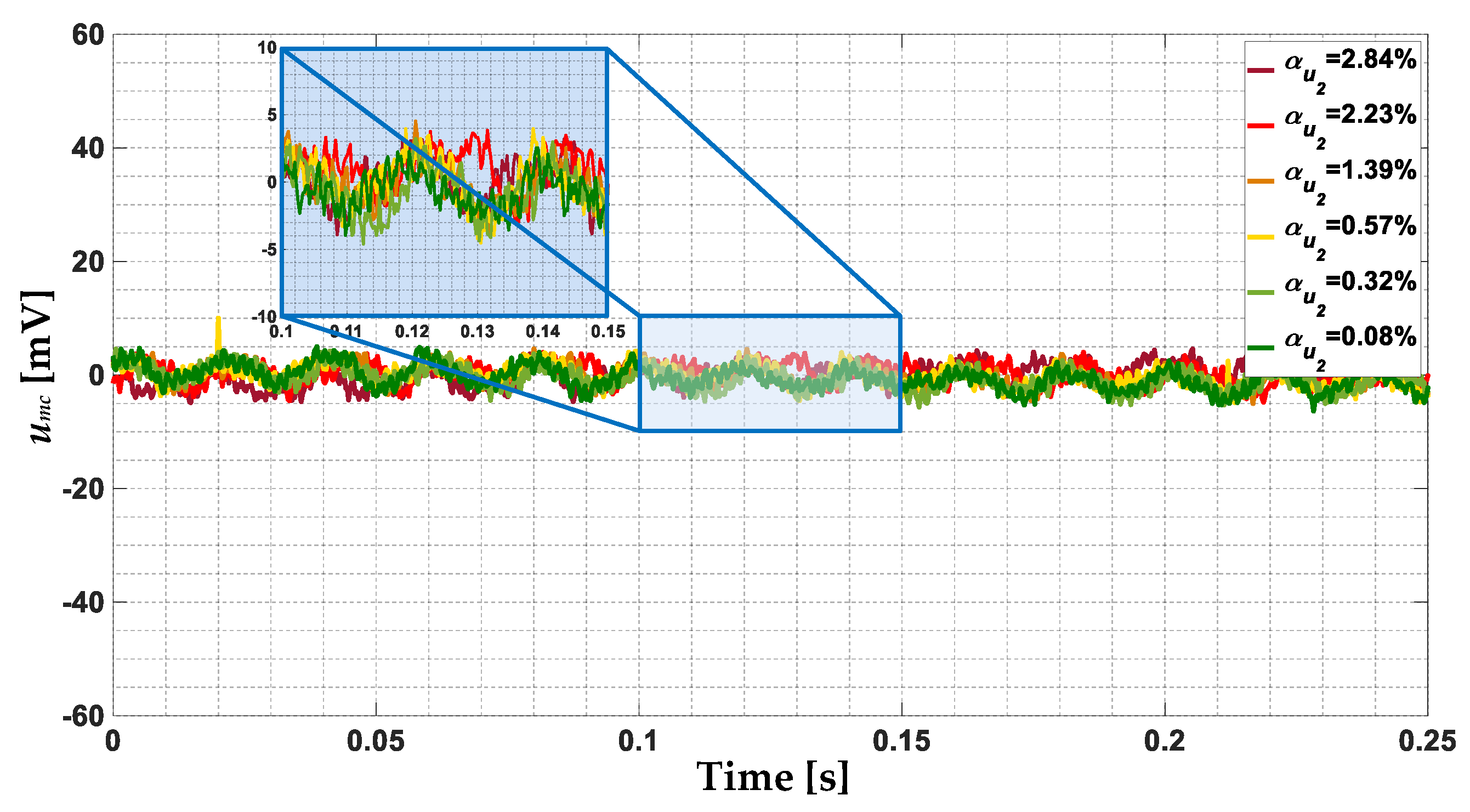
- The unbalanced supply voltage of the IM drive did not lead to an increase in the amplitude of the umc;
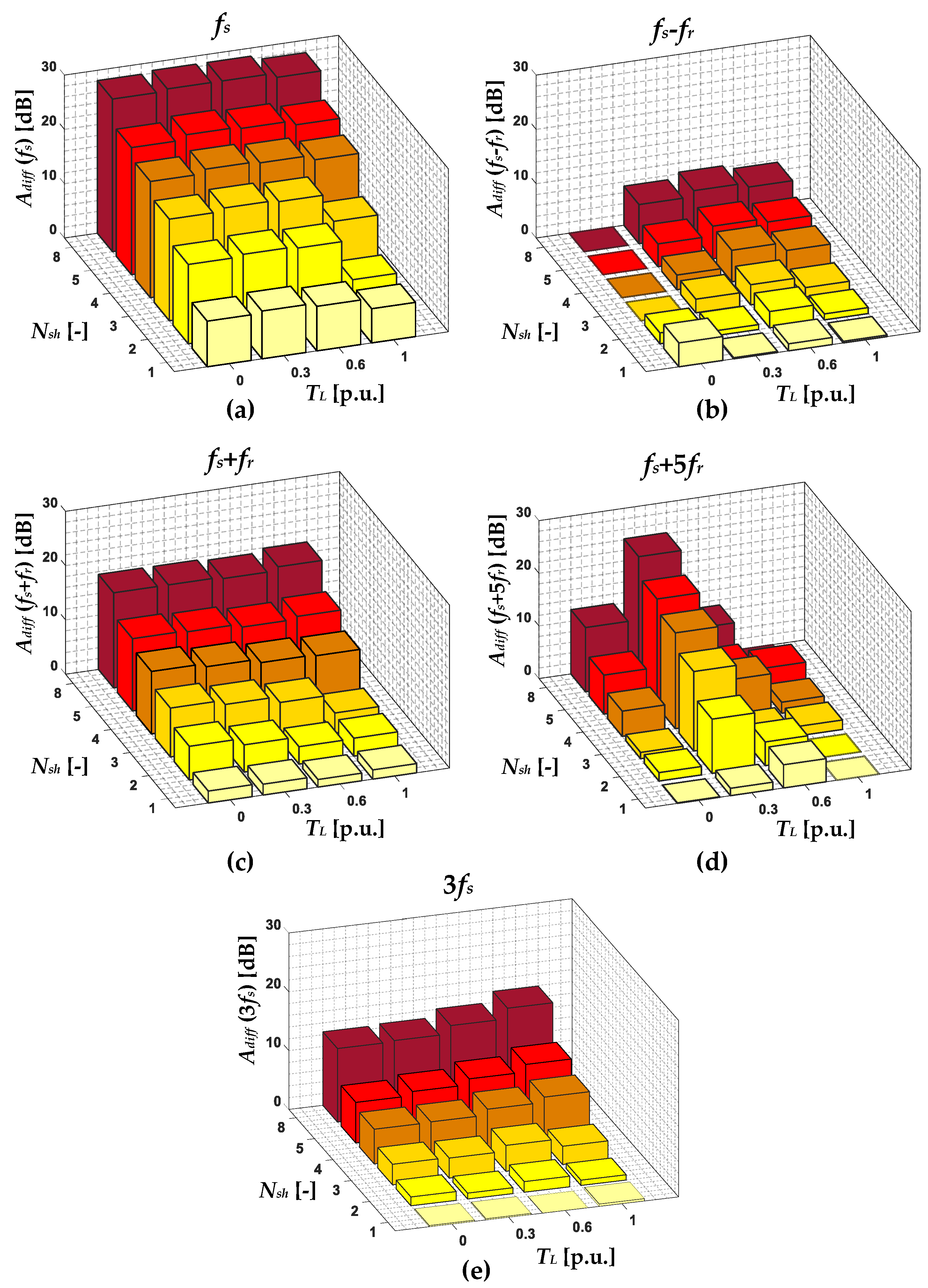
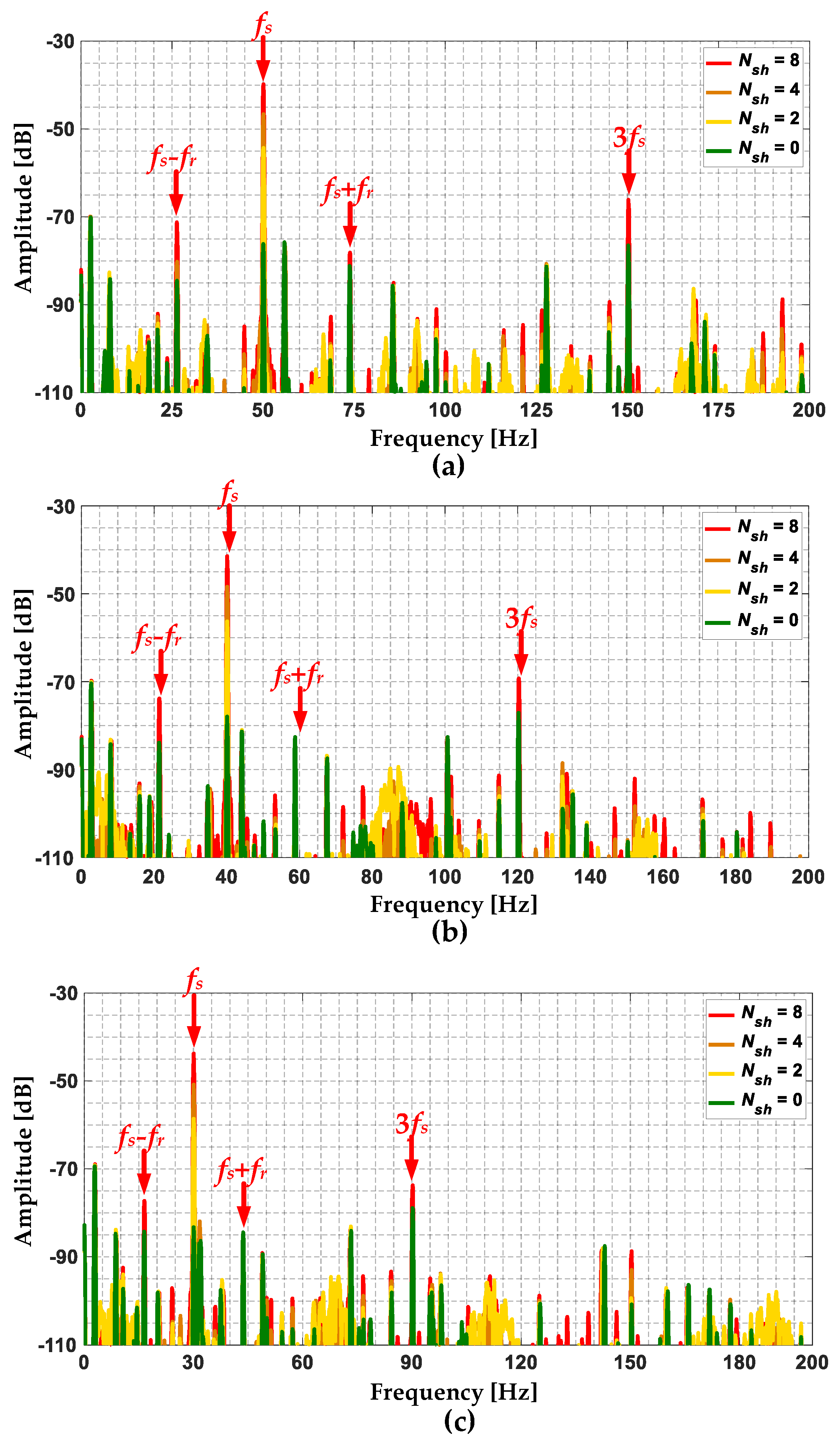
- The value of the amplitude of the fs component in the umc FFT spectrum increased the most as a result of the ITSC already with one shorted turn in the stator winding. The amplitudes of the fs + fr and 3fs components also increased, but the increase was smaller compared to fs;
- The value of the amplitudes of the fs + 2fr and 3fs − 2fr (particularly) components in the umc FFT spectrum increased the most due to the unbalanced supply voltage;
- The distinguishing between the two abnormal conditions analyzed (stator winding fault and unbalanced supply voltage) were recognized based on the monitoring of the amplitudes of the fs (characteristic for stator winding fault) and the 3fs − 2fr (characteristic for unbalanced supply voltage) components;
- The developed method of monitoring the condition of the IM stator winding proved to be effective not only in the case of an IM supplied from the grid but also by the inverter.
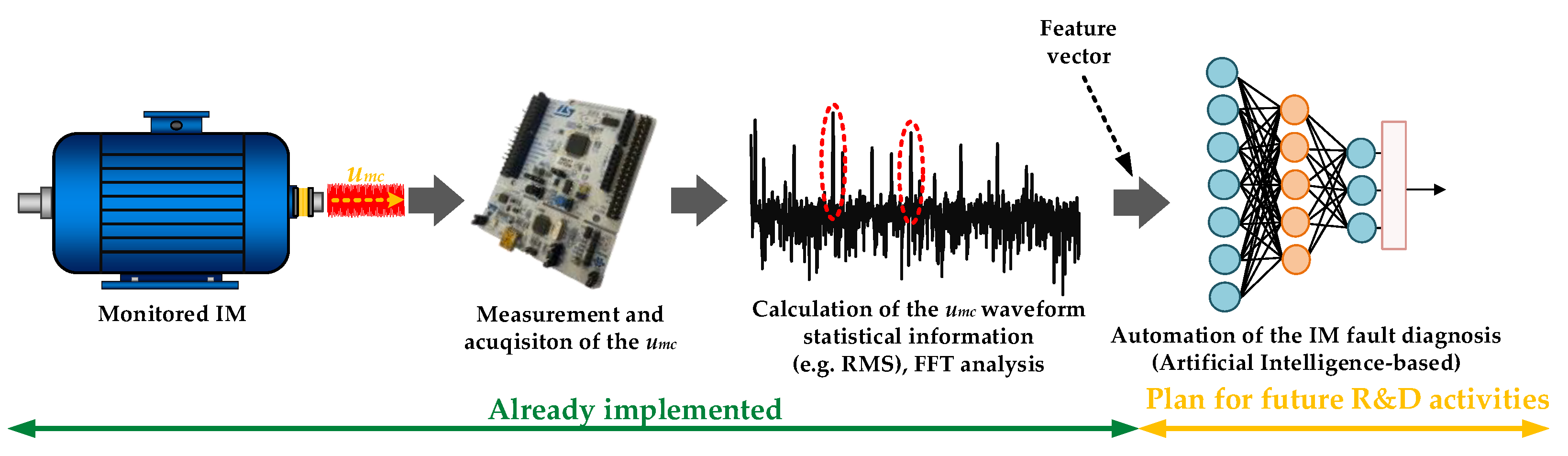
- The improvement of the proposed system with the addition of a module that, based on the input vector consisting of statistical information about the voltage signal induced in the measuring coil by the axial flux and the values of harmonic amplitudes, will automatically indicate the state of the stator winding and the symmetry of the supply voltage;
- The integration of the amplifier and microcontroller on a single, specially designed compact PCB that can be mounted at the installer’s convenience;
- An extension of the functionality of the developed system to measure other diagnostic signals, such as stator phase currents, and the ability to detect other types of faults, such as broken rotor cage bars, bearing faults, and others;
- An extension of the functionality of the developed system with other mathematical apparatuses that can be used for diagnostic signal processing to extract the symptoms of ITSC and unbalanced supply voltage, such as STFT;
- Adding the function of predicting the possibility of a given failure of the analyzed machine; an extension with the functionality called predictive maintenance;
- The analysis of application possibilities and industry areas where the developed system could be also applied.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Laadjal, K.; Amaral, A.M.R.; Sahraoui, M.; Cardoso, A.J.M. Machine Learning Based Method for Impedance Estimation and Unbalance Supply Voltage Detection in Induction Motors. Sensors 2023, 23, 7989. [Google Scholar] [CrossRef] [PubMed]
- Aguayo-Tapia, S.; Avalos-Almazan, G.; Rangel-Magdaleno, J.D.J.; Ramirez-Cortes, J.M. Physical Variable Measurement Techniques for Fault Detection in Electric Motors. Energies 2023, 16, 4780. [Google Scholar] [CrossRef]
- He, J.; Somogyi, C.; Strandt, A.; Demerdash, N.A.O. Diagnosis of Stator Winding Short-Circuit Faults in an Interior Permanent Magnet Synchronous Machine. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburg, PA, USA, 15–18 September 2014; pp. 3125–3130. [Google Scholar]
- Baruti, K.H.; Li, C.; Erturk, F.; Akin, B. Online Stator Inter-Turn Short Circuit Estimation and Fault Management in Permanent Magnet Motors. IEEE Trans. Energy Convers. 2023, 38, 1016–1027. [Google Scholar] [CrossRef]
- Gonzalez-Cordoba, J.L.; Osornio-Rios, R.A.; Granados-Lieberman, D.; Romero-Troncoso, R.D.J.; Valtierra-Rodriguez, M. Thermal-Impact-Based Protection of Induction Motors Under Voltage Unbalance Conditions. IEEE Trans. Energy Convers. 2018, 33, 1748–1756. [Google Scholar] [CrossRef]
- Lashkari, N.; Poshtan, J.; Azgomi, H.F. Simulative and Experimental Investigation on Stator Winding Turn and Unbalanced Supply Voltage Fault Diagnosis in Induction Motors Using Artificial Neural Networks. ISA Trans. 2015, 59, 334–342. [Google Scholar] [CrossRef] [PubMed]
- Siddique, A.; Yadava, G.S.; Singh, B. A Review of Stator Fault Monitoring Techniques of Induction Motors. IEEE Trans. Energy Convers. 2005, 20, 106–114. [Google Scholar] [CrossRef]
- Niu, G.; Dong, X.; Chen, Y. Motor Fault Diagnostics Based on Current Signatures: A Review. IEEE Trans. Instrum. Meas. 2023, 72, 1–19. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.-A. Advances in Electrical Machine, Power Electronic, and Drive Condition Monitoring and Fault Detection: State of the Art. IEEE Trans. Ind. Electron. 2015, 62, 1746–1759. [Google Scholar] [CrossRef]
- Garcia-Calva, T.; Morinigo-Sotelo, D.; Fernandez-Cavero, V.; Romero-Troncoso, R. Early Detection of Faults in Induction Motors—A Review. Energies 2022, 15, 7855. [Google Scholar] [CrossRef]
- Gultekin, M.A.; Bazzi, A. Review of Fault Detection and Diagnosis Techniques for AC Motor Drives. Energies 2023, 16, 5602. [Google Scholar] [CrossRef]
- Alloui, A.; Laadjal, K.; Sahraoui, M.; Marques Cardoso, A.J. Online Interturn Short-Circuit Fault Diagnosis in Induction Motors Operating under Unbalanced Supply Voltage and Load Variations, Using the STLSP Technique. IEEE Trans. Ind. Electron. 2023, 70, 3080–3089. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Cardoso, A.J.M. Stator Winding Fault Diagnosis in Three-Phase Synchronous and Asynchronous Motors, by the Extended Park’s Vector Approach. IEEE Trans. Ind. Appl. 2001, 37, 1227–1233. [Google Scholar] [CrossRef]
- Piechocki, M.; Pajchrowski, T.; Kraft, M.; Wolkiewicz, M.; Ewert, P. Unraveling Induction Motor State through Thermal Imaging and Edge Processing: A Step towards Explainable Fault Diagnosis. Eksploat. Niezawodn. Maint. Reliab. 2023, 25. [Google Scholar] [CrossRef]
- Drif, M.; Cardoso, A.J.M. Stator Fault Diagnostics in Squirrel Cage Three-Phase Induction Motor Drives Using the Instantaneous Active and Reactive Power Signature Analyses. IEEE Trans. Ind. Inf. 2014, 10, 1348–1360. [Google Scholar] [CrossRef]
- Kumar, T.C.A.; Singh, G.; Naikan, V.N.A. Sensitivity of Rotor Slot Harmonics Due to Inter-Turn Fault in Induction Motors through Vibration Analysis. In Proceedings of the 2018 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 18–20 January 2018; pp. 1–3. [Google Scholar]
- Skowron, M.; Wolkiewicz, M.; Orlowska-Kowalska, T.; Kowalski, C.T. Effectiveness of Selected Neural Network Structures Based on Axial Flux Analysis in Stator and Rotor Winding Incipient Fault Detection of Inverter-Fed Induction Motors. Energies 2019, 12, 2392. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. Fault Diagnosis of PMSM Stator Winding Based on Continuous Wavelet Transform Analysis of Stator Phase Current Signal and Selected Artificial Intelligence Techniques. Electronics 2023, 12, 1543. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Wolkiewicz, M.; Pietrzak, P.; Skowron, M.; Ewert, P.; Tarchala, G.; Krzysztofiak, M.; Kowalski, C.T. Fault Diagnosis and Fault-Tolerant Control of PMSM Drives–State of the Art and Future Challenges. IEEE Access 2022, 10, 59979–60024. [Google Scholar] [CrossRef]
- Al-Andoli, M.N.; Tan, S.C.; Sim, K.S.; Seera, M.; Lim, C.P. A Parallel Ensemble Learning Model for Fault Detection and Diagnosis of Industrial Machinery. IEEE Access 2023, 11, 39866–39878. [Google Scholar] [CrossRef]
- Ma, J.; Liu, X.; Hu, J.; Fei, J.; Zhao, G.; Zhu, Z. Stator ITSC Fault Diagnosis of EMU Asynchronous Traction Motor Based on ApFFT Time-Shift Phase Difference Spectrum Correction and SVM. Energies 2023, 16, 5612. [Google Scholar] [CrossRef]
- Das, A.K.; Das, S.; Pradhan, A.K.; Chatterjee, B.; Dalai, S. RPCNNet: A Deep Learning Approach to Sense Minor Stator Winding Interturn Fault Severity in Induction Motor under Variable Load Condition. IEEE Sens. J. 2023, 23, 3965–3972. [Google Scholar] [CrossRef]
- Zhou, Y.; Shang, Q.; Guan, C. Three-Phase Asynchronous Motor Fault Diagnosis Using Attention Mechanism and Hybrid CNN-MLP By Multi-Sensor Information. IEEE Access 2023, 11, 98402–98414. [Google Scholar] [CrossRef]
- Guo, J.; Wan, J.-L.; Yang, Y.; Dai, L.; Tang, A.; Huang, B.; Zhang, F.; Li, H. A Deep Feature Learning Method for Remaining Useful Life Prediction of Drilling Pumps. Energy 2023, 282, 128442. [Google Scholar] [CrossRef]
- Sawitri, D.R.; Asfani, D.A.; Purnomo, M.H.; Purnama, I.K.E.; Ashari, M. Early Detection of Unbalance Voltage in Three Phase Induction Motor Based on SVM. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 573–578. [Google Scholar]
- Refaat, S.S.; Abu-Rub, H.; Saad, M.S.; Aboul-Zahab, E.M.; Iqbal, A. Detection, Diagnoses and Discrimination of Stator Turn to Turn Fault and Unbalanced Supply Voltage Fault for Three Phase Induction Motors. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 910–915. [Google Scholar]
- Çakır, A.; Çalış, H.; Küçüksille, E.U. Data Mining Approach for Supply Unbalance Detection in Induction Motor. Expert Syst. Appl. 2009, 36, 11808–11813. [Google Scholar] [CrossRef]
- Laadjal, K.; Sahraoui, M.; Alloui, A.; Cardoso, A.J.M. Three-Phase Induction Motors Online Protection against Unbalanced Supply Voltages. Machines 2021, 9, 203. [Google Scholar] [CrossRef]
- Vassiliev, A.E.; Ivanova, T.Y.; Cabezas Tapia, D.F.; Luong, Q.T. Microcontroller-Based Embedded System Equipment Development for Research and Educational Support. In Proceedings of the 2016 International Conference on Information Management and Technology (ICIMTech), Bandung, Malaysia, 16–18 November 2016; pp. 219–223. [Google Scholar]
- Zachary Lasiuk, P.V.J.A. The Insider’s Guide to Arm Cortex-M Development. Leverage Embedded Software Development Tools and Examples to Become an Efficient Cortex-M Developer; Packt Publishing: Burmingham, UK, 2022. [Google Scholar]
- Saha, S.; Tyagi, T.; Gadre, D.V. ARM(R) Microcontroller Based Automatic Power Factor Monitoring and Control System. In Proceedings of the 2013 Texas Instruments India Educators’ Conference, Bangalore, India, 4–6 April 2013; pp. 165–170. [Google Scholar]
- Waswani, R.; Pawar, A.; Deore, M.; Patel, R. Induction Motor Fault Detection, Protection and Speed Control Using Arduino. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; pp. 1–5. [Google Scholar]
- Sutar, P.P.; Panchade, V.M. Induction Motor Faults Mitigation Using Microcontroller. In Proceedings of the 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Chennai, India, 1–2 August 2017; pp. 489–493. [Google Scholar]
- Gargiulo, F.; Liccardo, A.; Schiano Lo Moriello, R. A Non-Invasive Method Based on AI and Current Measurements for the Detection of Faults in Three-Phase Motors. Energies 2022, 15, 4407. [Google Scholar] [CrossRef]
- STM32 Nucleo-64 Development Board with STM32L476RG MCU Product Overview. Available online: https://www.st.com/en/evaluation-tools/nucleo-l476rg.html (accessed on 10 December 2023).
- Reference Manual RM0351: STM32L47xxx, STM32L48xxx, STM32L49xxx and STM32L4Axxx Advanced Arm®-Based 32-Bit MCUs. Available online: https://www.st.com/resource/en/reference_manual/rm0351-stm32l47xxx-stm32l48xxx-stm32l49xxx-and-stm32l4axxx-advanced-armbased-32bit-mcus-stmicroelectronics.pdf (accessed on 10 December 2023).
- Skowron, M. Application of Deep Learning Neural Networks for the Diagnosis of Electrical Damage to the Induction Motor Using the Axial Flux. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 1031–1038. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Core | ARM Cortex-M4 (32-bit) |
| Operating clock frequency | Up to 80 MHz |
| Flash memory | 1 MB |
| SRAM memory | 128 kB |
| DMA | 14-channel |
| Key communication interfaces | USB OTG, 3× I2C, 5× USART, 3× SPI, CAN |
| ADC | 3 × 12-bit |
| DAC | 2 × 12-bit |
| Comparators | 2× ultra-low power |
| Name of the Parameter | Symbol | Units | |
|---|---|---|---|
| Power | PN | 1500 | [W] |
| Torque | TN | 10.16 | [Nm] |
| Speed | nN | 1410 | [rpm] |
| Stator phase voltage | UsN | 230 | V |
| Stator current | IsN | 3.5 | [A] |
| Frequency | fsN | 50 | [Hz] |
| Pole pairs number | pp | 2 | [-] |
| Number of stator turns | Nst | 312 | [-] |
| The RMS Value of the Supply Voltage of the Phase C | Supply Voltage Unbalance Coefficient αu2 |
|---|---|
| 230 V | 0.08% |
| 228 V | 0.32% |
| 225 V | 0.57% |
| 220 V | 1.39% |
| 215 V | 2.23% |
| 210 V | 2.84% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pietrzak, P.; Pietrzak, P.; Wolkiewicz, M. Microcontroller-Based Embedded System for the Diagnosis of Stator Winding Faults and Unbalanced Supply Voltage of the Induction Motors. Energies 2024, 17, 387. https://doi.org/10.3390/en17020387
Pietrzak P, Pietrzak P, Wolkiewicz M. Microcontroller-Based Embedded System for the Diagnosis of Stator Winding Faults and Unbalanced Supply Voltage of the Induction Motors. Energies. 2024; 17(2):387. https://doi.org/10.3390/en17020387
Chicago/Turabian StylePietrzak, Przemyslaw, Piotr Pietrzak, and Marcin Wolkiewicz. 2024. "Microcontroller-Based Embedded System for the Diagnosis of Stator Winding Faults and Unbalanced Supply Voltage of the Induction Motors" Energies 17, no. 2: 387. https://doi.org/10.3390/en17020387
APA StylePietrzak, P., Pietrzak, P., & Wolkiewicz, M. (2024). Microcontroller-Based Embedded System for the Diagnosis of Stator Winding Faults and Unbalanced Supply Voltage of the Induction Motors. Energies, 17(2), 387. https://doi.org/10.3390/en17020387