
Generating Electricity with Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers



Abstract
:1. Introduction
1.1. Dielectric Elastomer Actuators and Generators
1.2. Hydraulically Amplified Self-Healing Electrostatic Actuators and Generators
1.3. Paper Outline
2. Materials and Methods
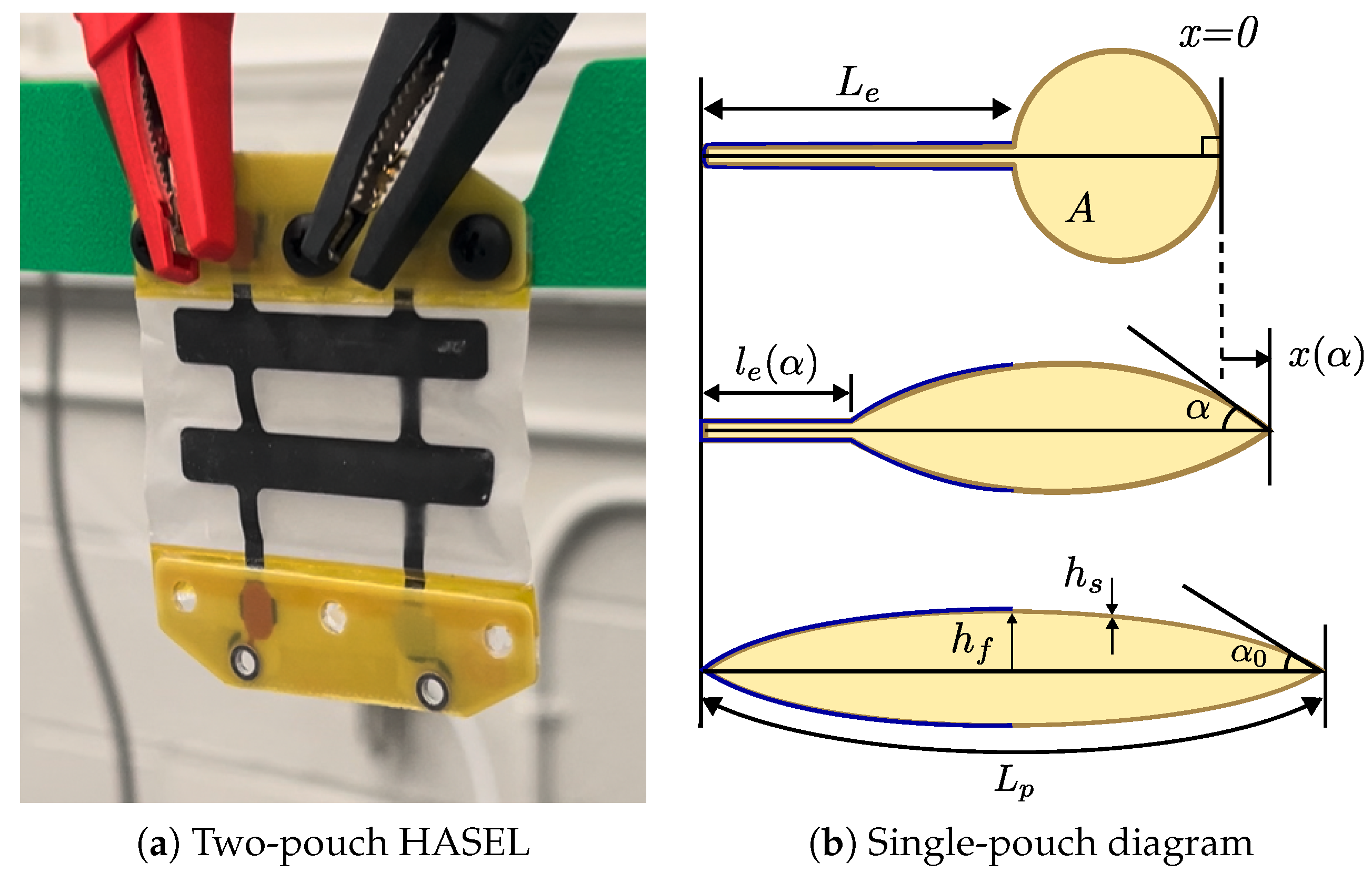
2.1. Analytic Model of HASEL Electrostatics
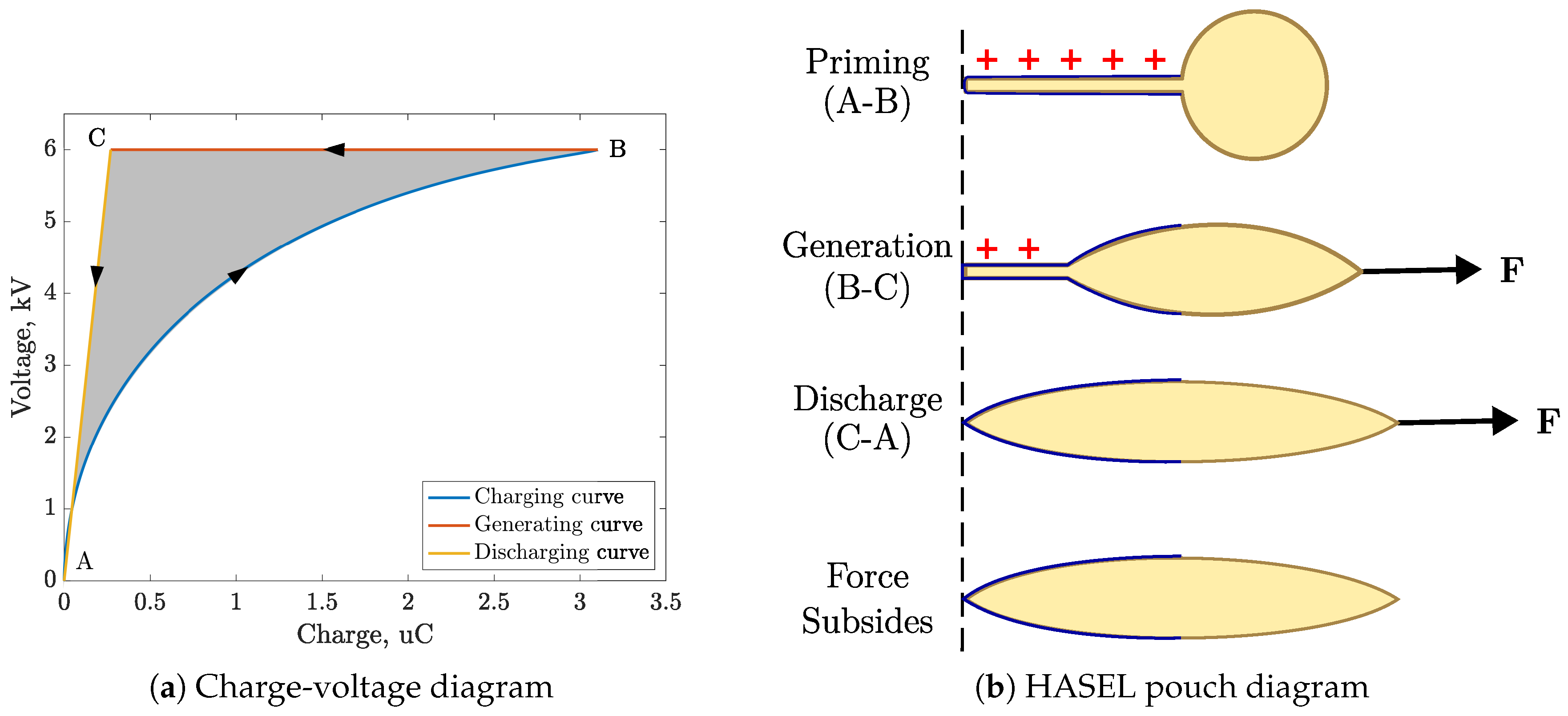
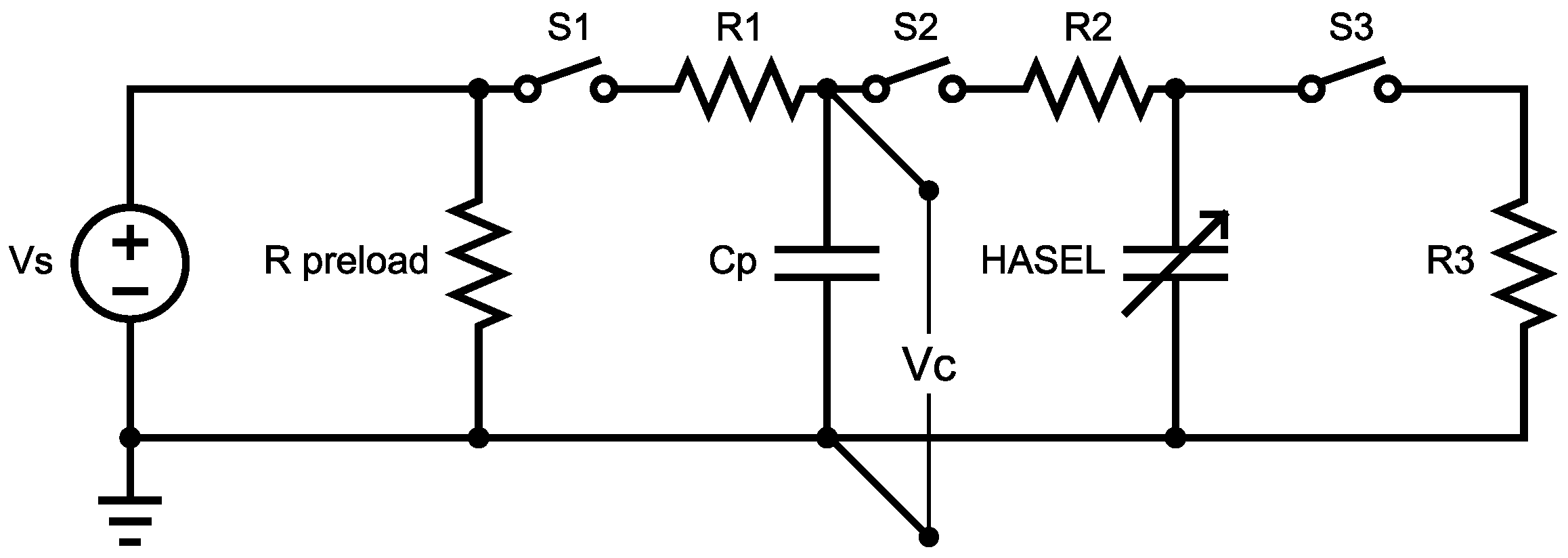
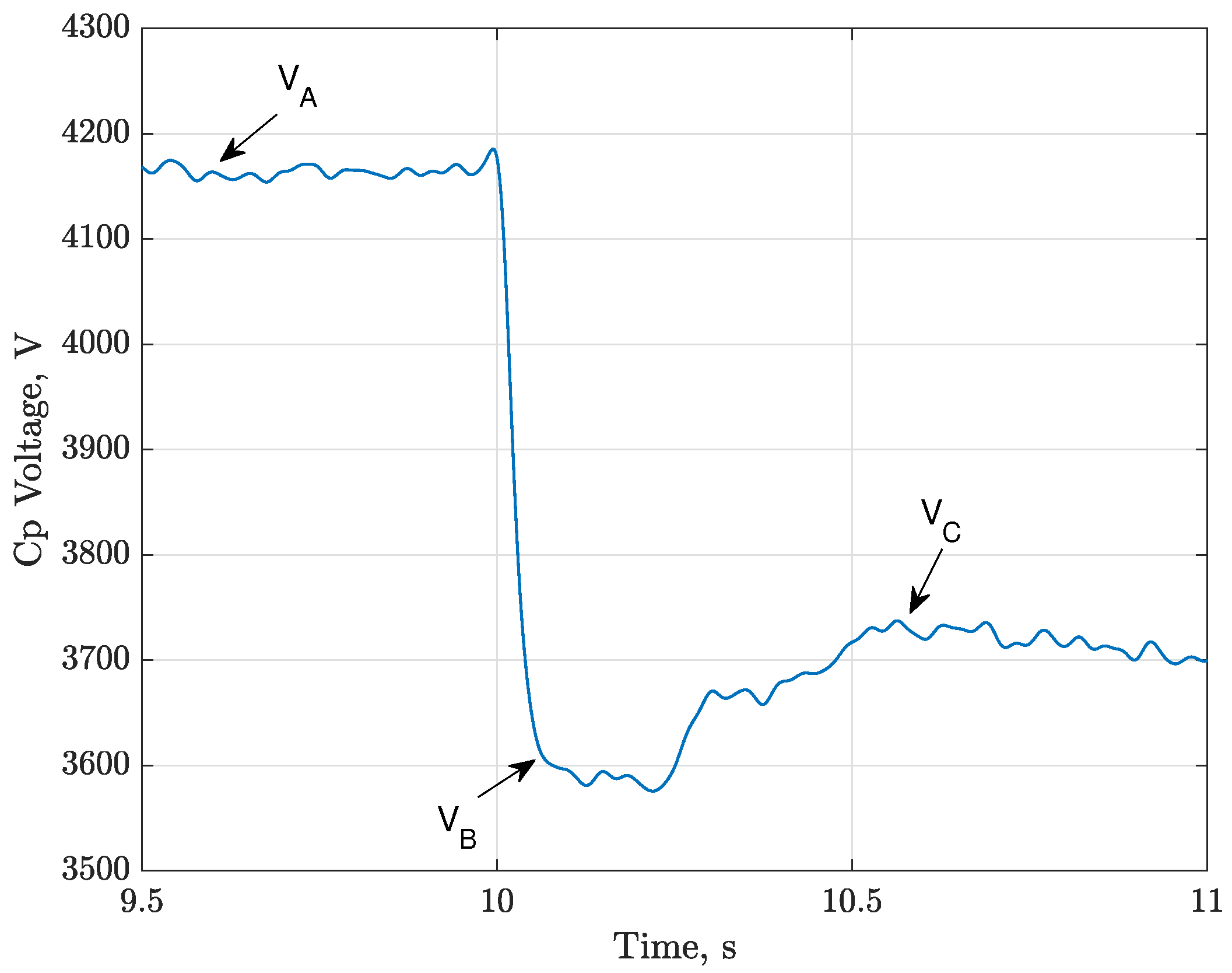
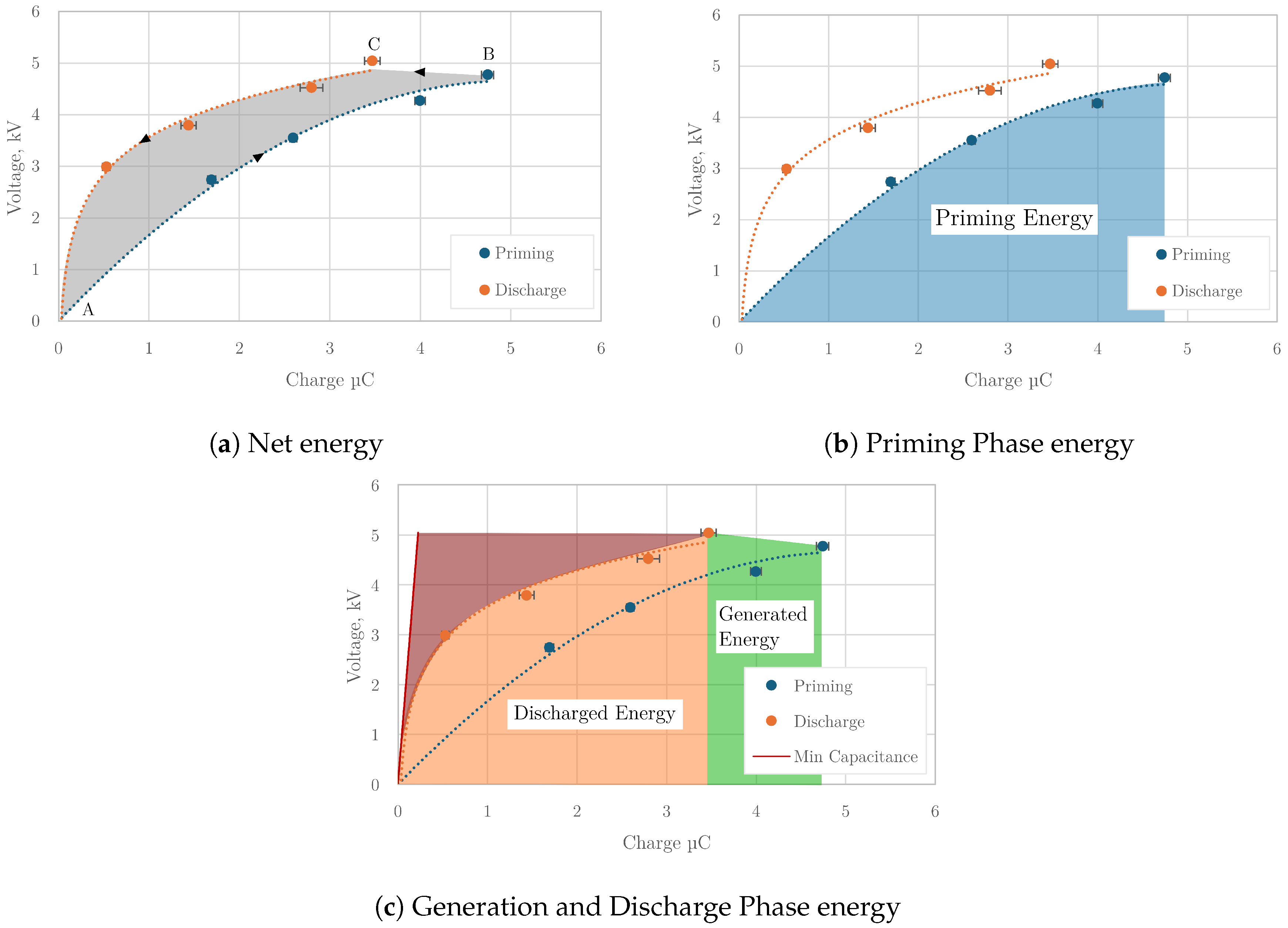
2.2. Energy Generation Method
- (1)
- Priming Phase (A-B): Apply priming voltage to the HASEL using a precharged in-parallel capacitor. Applying the priming voltage causes the HASEL electrodes to zip together and increase the capacitance.
- (2)
- Generation Phase (B-C): While held at constant voltage, stretch the HASEL to decrease the capacitance and generate charge that flows onto the in-parallel capacitor.
- (3)
- Discharge Phase (C-A): Disconnect the HASEL from the in-parallel capacitor and discharge the HASEL to ground at the lowest capacitance state.
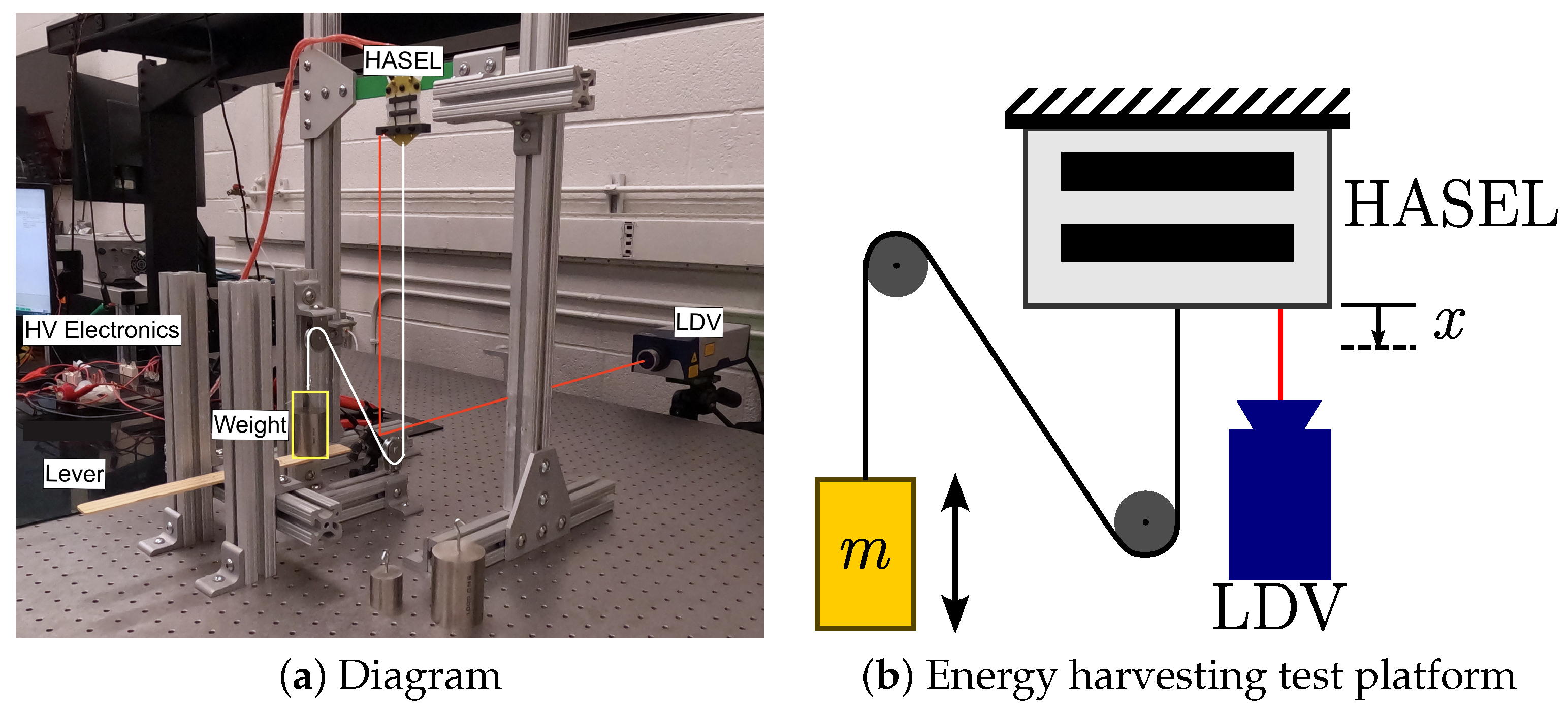
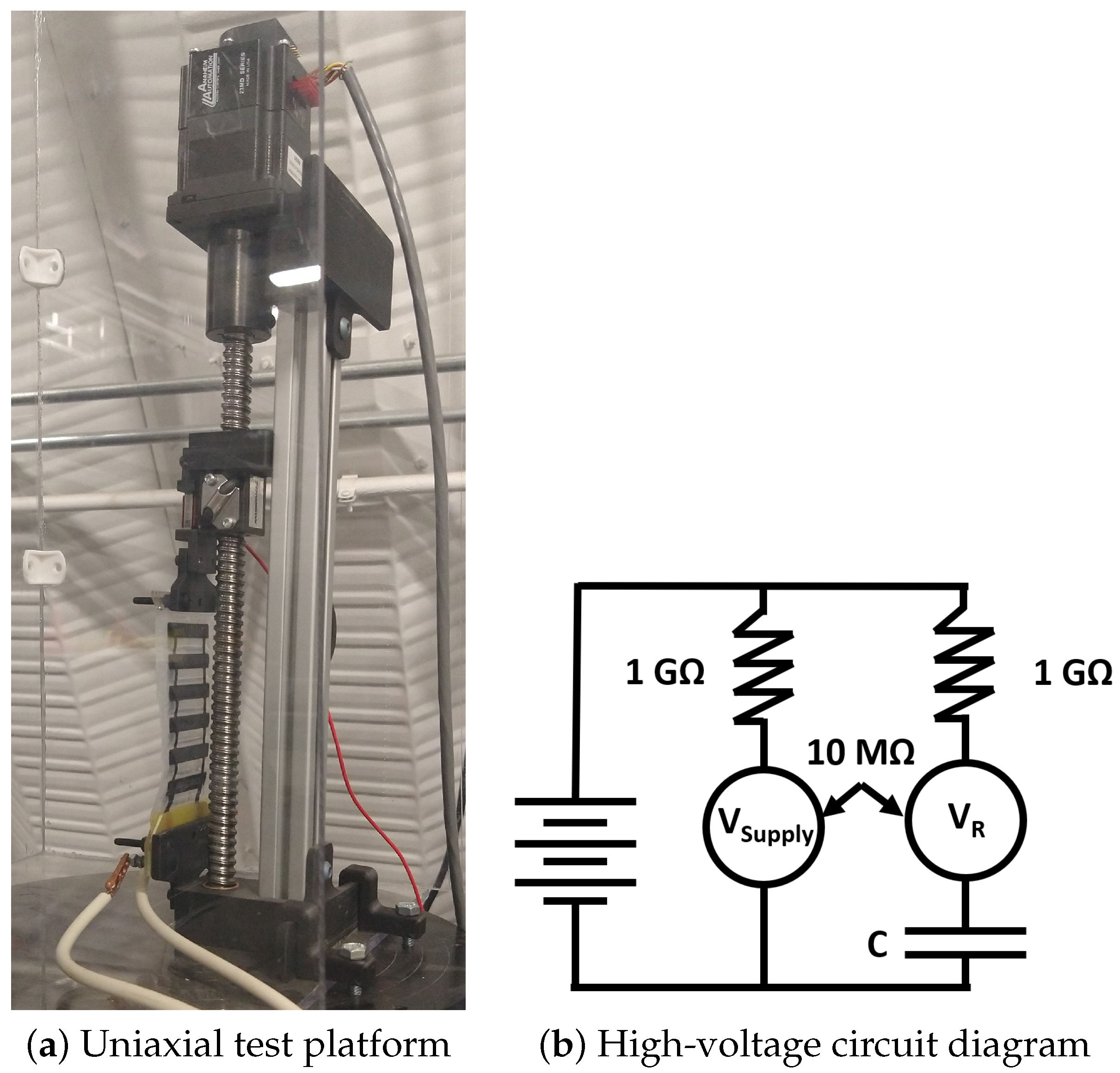
2.3. Energy Generation Experimental Platform
2.4. HASEL Constitutive Relation Experimental Platform
3. Results
3.1. Charge–Voltage Relationship During Energy Harvesting Cycle
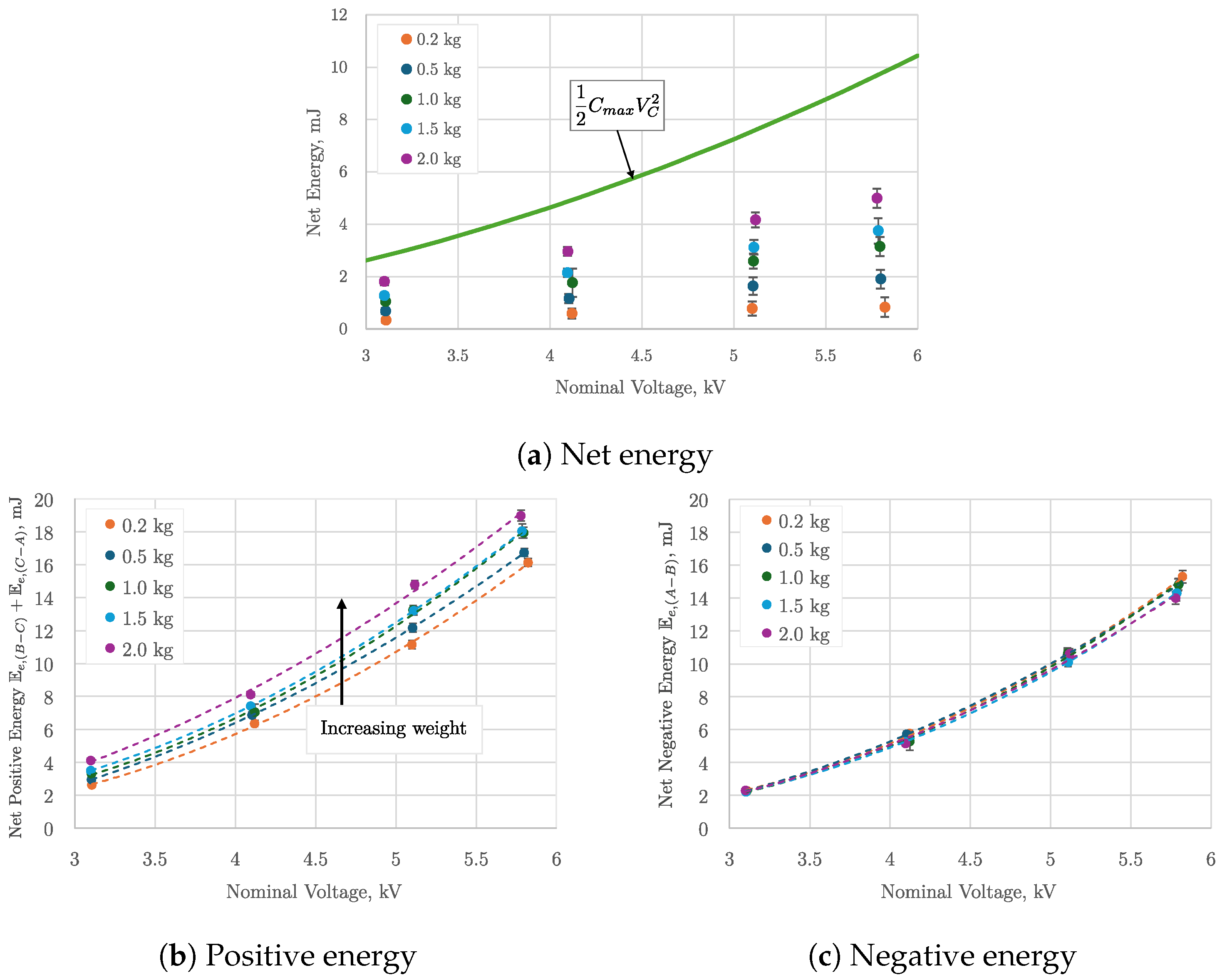
3.2. Net Energy Generation Performance
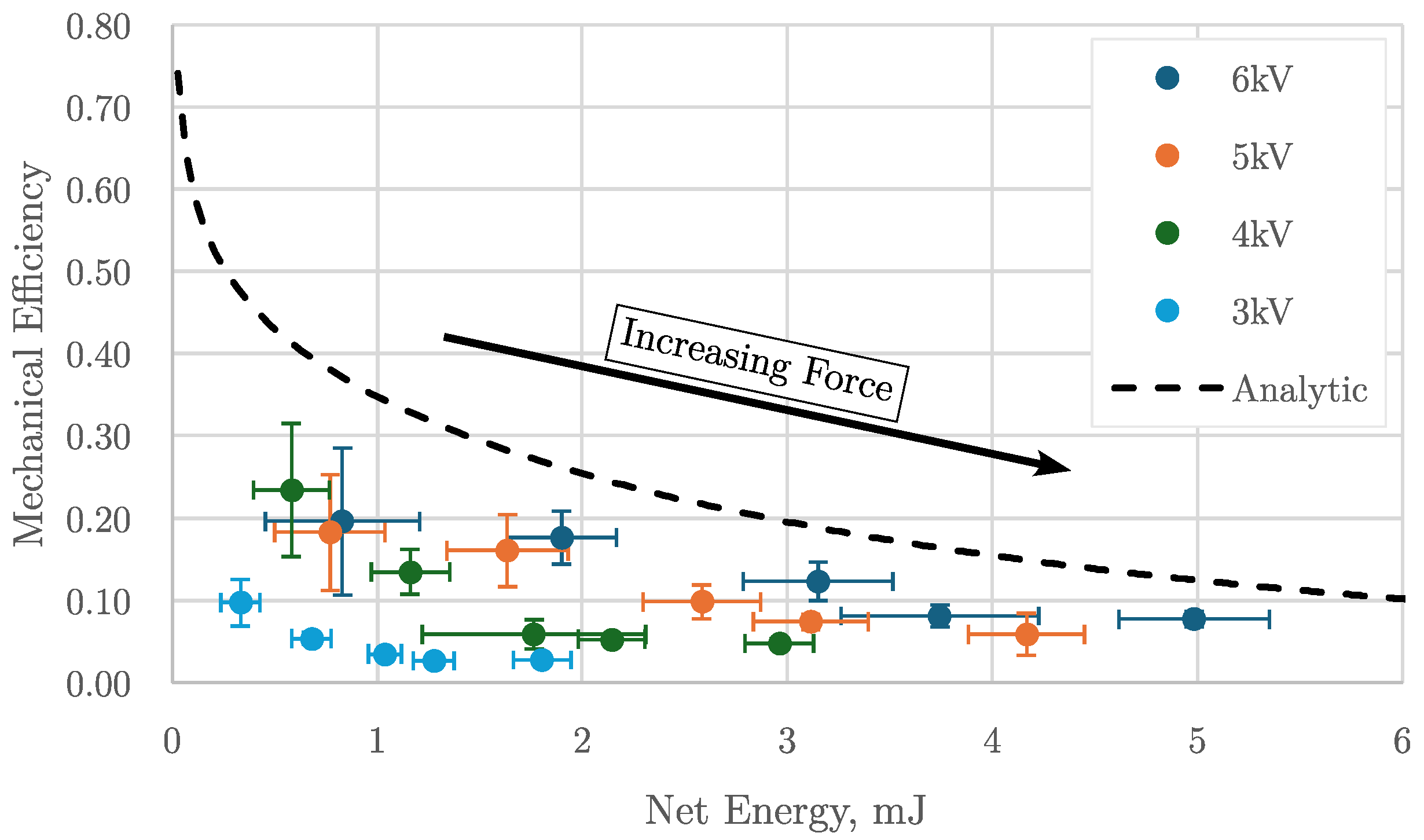
3.3. Efficiency Is Nonlinear with Mechanical Input
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| HASEL | Hydraulically amplified self-healing electrostatic |
| DEG | Dielectric elastomer generator |
| DEA | Dielectric elastomer actuator |
| HexDEEC | Hexagonal distributed embedded energy converter |
| LDV | Laser Doppler vibrometer |
| CV | Constant voltage |
| QV | Charge voltage |
References
- Thomson, G.; Yurchenko, D.; Val, D.V. Dielectric Elastomers for Energy Harvesting. In Energy Harvesting; Manyala, R., Ed.; InTech: London, UK, 2018. [Google Scholar] [CrossRef]
- Moretti, G.; Rosset, S.; Vertechy, R.; Anderson, I.; Fontana, M. A Review of Dielectric Elastomer Generator Systems. Adv. Intell. Syst. 2020, 2, 2000125. [Google Scholar] [CrossRef]
- Niffenegger, J.S.; Boren, B. Numerical Methods to Evaluate Hyperelastic Transducers: Hexagonal Distributed Embedded Energy Converters. Energies 2023, 16, 8100. [Google Scholar] [CrossRef]
- Boren, B. Distributed Embedded Energy Converters for Ocean Wave Energy Harvesting: Enabling a Domain of Transformative Technologies. In Proceedings of the European Wave and Tidal Energy Conference, Plymouth, UK, 5–9 September 2021. [Google Scholar]
- Collins, I.; Hossain, M.; Dettmer, W.; Masters, I. Flexible Membrane Structures for Wave Energy Harvesting: A Review of the Developments, Materials and Computational Modelling Approaches. Renew. Sustain. Energy Rev. 2021, 151, 111478. [Google Scholar] [CrossRef]
- Boren, B. Prototype and Codesign of Nascent Flexible Wave Energy Converter Concepts. 2021. Available online: https://www.nrel.gov/docs/fy21osti/80625.pdf (accessed on 8 October 2024).
- Boren, B.; Mendoza, N.; Niffenegger, J. Distributed Embedded Energy Converter Technologies for Marine Renewable Energy (A Technical Report); Technical Report NREL/TP–5700-85158, 1997371, MainId:85931; NREL: Golden, CO, USA, 2023. [Google Scholar] [CrossRef]
- SBM Offshore. The S3® Wave Energy Converter Represents a Paradigm Shift in Wave Energy Conversion. 2019. Available online: https://www.sbmoffshore.com/sites/sbm-offshore/files/sbm-offshore/newsroom/news-and-events/pdf/sbm-offshore-technology-wave-energy-converter.pdf (accessed on 3 November 2024).
- Rosset, S.; Shea, H.R. Flexible and Stretchable Electrodes for Dielectric Elastomer Actuators. Appl. Phys. A 2013, 110, 281–307. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.s.P.; Clarke, D.R.; Wood, R.J. Controlled Flight of a Microrobot Powered by Soft Artificial Muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef]
- Duduta, M.; Berlinger, F.; Nagpal, R.; Clarke, D.R.; Wood, R.J.; Temel, F.Z. Tunable Multi-Modal Locomotion in Soft Dielectric Elastomer Robots. IEEE Robot. Autom. Lett. 2020, 5, 3868–3875. [Google Scholar] [CrossRef]
- Andritsch, T.; Morshuis, P.H.F.; Smit, J.J.; Jean, P.; van Kessel, R.; Wattez, A.; Fourmon, A. Challenges of Using Electroactive Polymers in Large Scale Wave Energy Converters. In Proceedings of the 2012 Annual Report Conference on Electrical Insulation and Dielectric Phenomena, Montreal, QC, Canada, 14–17 October 2012; pp. 786–789. [Google Scholar]
- Jean, P.; Wattez, A.; Ardoise, G.; Melis, C.; Van Kessel, R.; Fourmon, A.; Barrabino, E.; Heemskerk, J.; Queau, J.P. Standing Wave Tube Electro Active Polymer Wave Energy Converter. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 12–15 March 2012; p. 83400C. [Google Scholar] [CrossRef]
- Moretti, G.; Papini, G.P.R.; Righi, M.; Forehand, D.; Ingram, D.; Vertechy, R.; Fontana, M. Resonant Wave Energy Harvester Based on Dielectric Elastomer Generator. Smart Mater. Struct. 2018, 27, 035015. [Google Scholar] [CrossRef]
- Maas, J.; Graf, C. Dielectric Elastomers for Hydro Power Harvesting. Smart Mater. Struct. 2012, 21, 064006. [Google Scholar] [CrossRef]
- Mathew, A.T.; Khanh, V.T.V.; Bin Mohamed Aliffi, M.D.; Liu, C.; Koh, S.J.A. A Self-Amplifying Dielectric-Elastomer-Amplified Piezoelectric for Motion-Based Energy Harvesting. J. Intell. Mater. Syst. Struct. 2020, 31, 152–166. [Google Scholar] [CrossRef]
- Duranti, M.; Righi, M.; Vertechy, R.; Fontana, M. A New Class of Variable Capacitance Generators Based on the Dielectric Fluid Transducer. Smart Mater. Struct. 2017, 26, 115014. [Google Scholar] [CrossRef]
- Kornbluh, R.D.; Pelrine, R.; Prahlad, H.; Wong-Foy, A.; McCoy, B.; Kim, S.; Eckerle, J.; Low, T. From Boots to Buoys: Promises and Challenges of Dielectric Elastomer Energy Harvesting. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 6–10 March 2011; p. 797605. [Google Scholar] [CrossRef]
- Acome, E.; Mitchell, S.K.; Morrissey, T.G.; Emmett, M.B.; Benjamin, C.; King, M.; Radakovitz, M.; Keplinger, C. Hydraulically Amplified Self-Healing Electrostatic Actuators with Muscle-like Performance. Science 2018, 359, 61–65. [Google Scholar] [CrossRef] [PubMed]
- Rothemund, P.; Kirkman, S.; Keplinger, C. Dynamics of Electrohydraulic Soft Actuators. Proc. Natl. Acad. Sci. USA 2020, 117, 16207–16213. [Google Scholar] [CrossRef] [PubMed]
- Hess, I.; Musgrave, P.F. A Continuum Soft Robotic Trout with Embedded HASEL Actuators: Design, Fabrication, and Swimming Kinematics. Smart Mater. Struct. 2024, 33, 105043. [Google Scholar] [CrossRef]
- Gravert, S.D.; Varini, E.; Kazemipour, A.; Michelis, M.Y.; Buchner, T.; Hinchet, R.; Katzschmann, R.K. Low-Voltage Electrohydraulic Actuators for Untethered Robotics. Sci. Adv. 2024, 10, eadi9319. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Joo, H.J.; Song, S.; Hu, W.; Keplinger, C.; Sitti, M. A Versatile Jellyfish-like Robotic Platform for Effective Underwater Propulsion and Manipulation. Sci. Adv. 2023, 9, eadg0292. [Google Scholar] [CrossRef]
- Park, T.; Kim, K.; Oh, S.R.; Cha, Y. Electrohydraulic Actuator for a Soft Gripper. Soft Robot. 2020, 7, 68–75. [Google Scholar] [CrossRef]
- Yoder, Z.; Macari, D.; Kleinwaks, G.; Schmidt, I.; Acome, E.; Keplinger, C. A Soft, Fast and Versatile Electrohydraulic Gripper with Capacitive Object Size Detection. Adv. Funct. Mater. 2023, 33, 2209080. [Google Scholar] [CrossRef]
- Yoder, Z.; Kellaris, N.; Chase-Markopoulou, C.; Ricken, D.; Mitchell, S.K.; Emmett, M.B.; Weir, R.F.F.; Segil, J.; Keplinger, C. Design of a High-Speed Prosthetic Finger Driven by Peano-HASEL Actuators. Front. Robot. AI 2020, 7, 586216. [Google Scholar] [CrossRef]
- Johnson, B.K.; Naris, M.; Sundaram, V.; Volchko, A.; Ly, K.; Mitchell, S.K.; Acome, E.; Kellaris, N.; Keplinger, C.; Correll, N.; et al. A Multifunctional Soft Robotic Shape Display with High-Speed Actuation, Sensing, and Control. Nat. Commun. 2023, 14, 4516. [Google Scholar] [CrossRef]
- Ly, K.; Kellaris, N.; McMorris, D.; Johnson, B.K.; Acome, E.; Sundaram, V.; Naris, M.; Humbert, J.S.; Rentschler, M.E.; Keplinger, C.; et al. Miniaturized Circuitry for Capacitive Self-Sensing and Closed-Loop Control of Soft Electrostatic Transducers. Soft Robot. 2021, 8, 673–686. [Google Scholar] [CrossRef]
- Moretti, G.; Duranti, M.; Righi, M.; Vertechy, R.; Fontana, M. Analysis of Dielectric Fluid Transducers. In Electroactive Polymer Actuators and Devices (EAPAD) XX; Bar-Cohen, Y., Ed.; SPIE: Denver, CO, USA, 2018; p. 29. [Google Scholar] [CrossRef]
- Kellaris, N.; Venkata, V.G.; Rothemund, P.; Keplinger, C. An Analytical Model for the Design of Peano-HASEL Actuators with Drastically Improved Performance. Extrem. Mech. Lett. 2019, 29, 100449. [Google Scholar] [CrossRef]
- Artimus Robotics. C-Series Contracting HASEL Actuator C-5015-04-01-B-ACAC-50-096; Datasheet; Artimus Robotics: Boulder, CO, USA, 2023. [Google Scholar]
- Koh, S.J.A.; Keplinger, C.; Li, T.; Bauer, S.; Suo, Z. Dielectric Elastomer Generators: How Much Energy Can Be Converted? IEEE/ASME Trans. Mechatronics 2011, 16, 33–41. [Google Scholar] [CrossRef]
- Whittaker, T.; Folley, M. Nearshore Oscillating Wave Surge Converters and the Development of Oyster. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 345–364. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.2 kg Energy | 0.5 kg Energy | 1.0 kg Energy | 1.50 kg Energy | 2.0 kg Energy | |
|---|---|---|---|---|---|
| 3 kV | mJ | mJ | mJ | mJ | mJ |
| 4 kV | mJ | mJ | mJ | mJ | mJ |
| 5 kV | mJ | mJ | mJ | mJ | mJ |
| 6 kV | mJ | mJ | mJ | mJ | mJ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hess, I.; Chamot, S.; Boren, B.; Musgrave, P. Generating Electricity with Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers. Energies 2024, 17, 6130. https://doi.org/10.3390/en17236130
Hess I, Chamot S, Boren B, Musgrave P. Generating Electricity with Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers. Energies. 2024; 17(23):6130. https://doi.org/10.3390/en17236130
Chicago/Turabian StyleHess, Isabel, Stephen Chamot, Blake Boren, and Patrick Musgrave. 2024. "Generating Electricity with Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers" Energies 17, no. 23: 6130. https://doi.org/10.3390/en17236130
APA StyleHess, I., Chamot, S., Boren, B., & Musgrave, P. (2024). Generating Electricity with Hydraulically Amplified Self-Healing Electrostatic (HASEL) Transducers. Energies, 17(23), 6130. https://doi.org/10.3390/en17236130