
Current Compensation Method in a Distribution System Based on a Four-Leg Inverter under Unbalanced Load Conditions Using an Artificial Neural Network


Abstract
1. Introduction
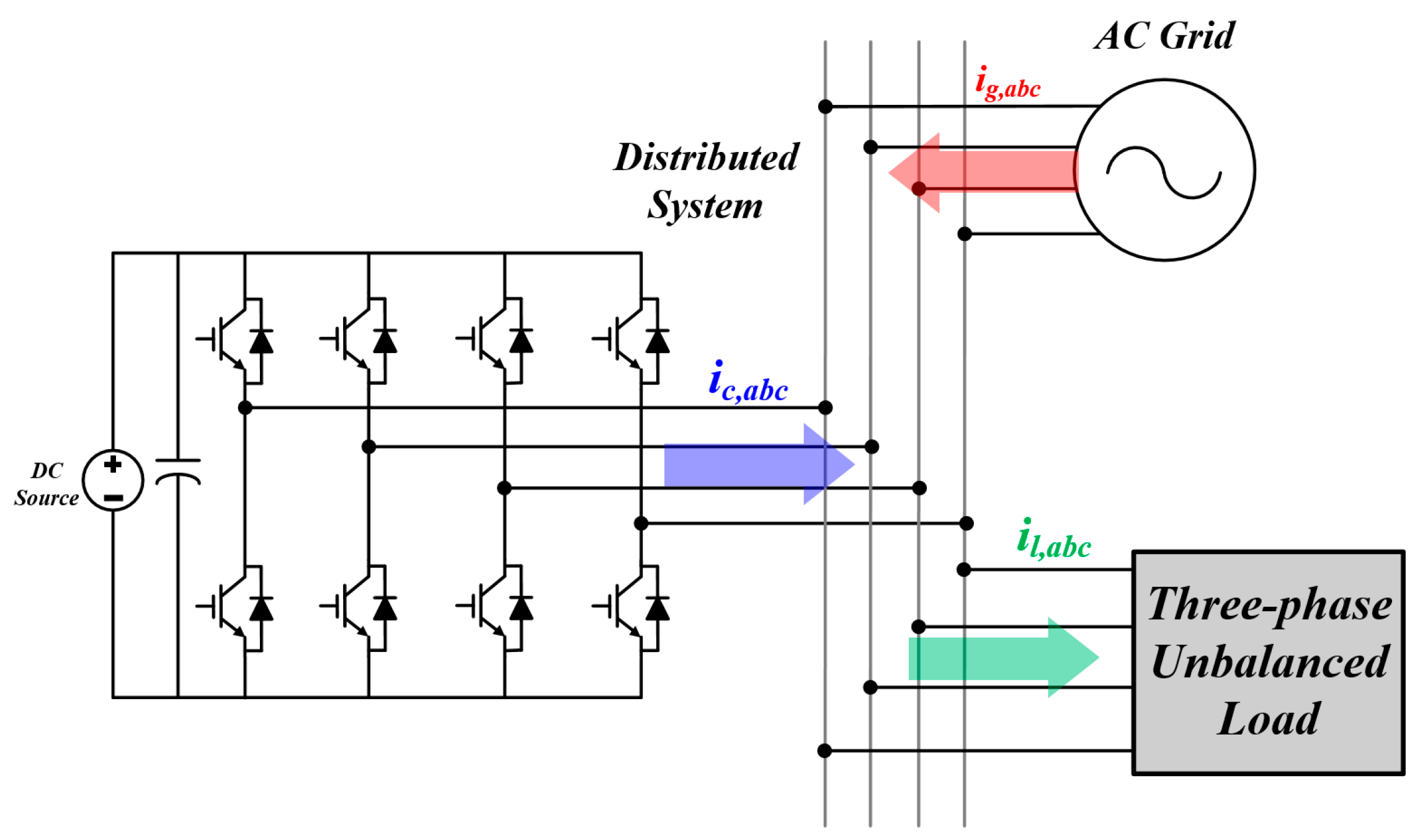
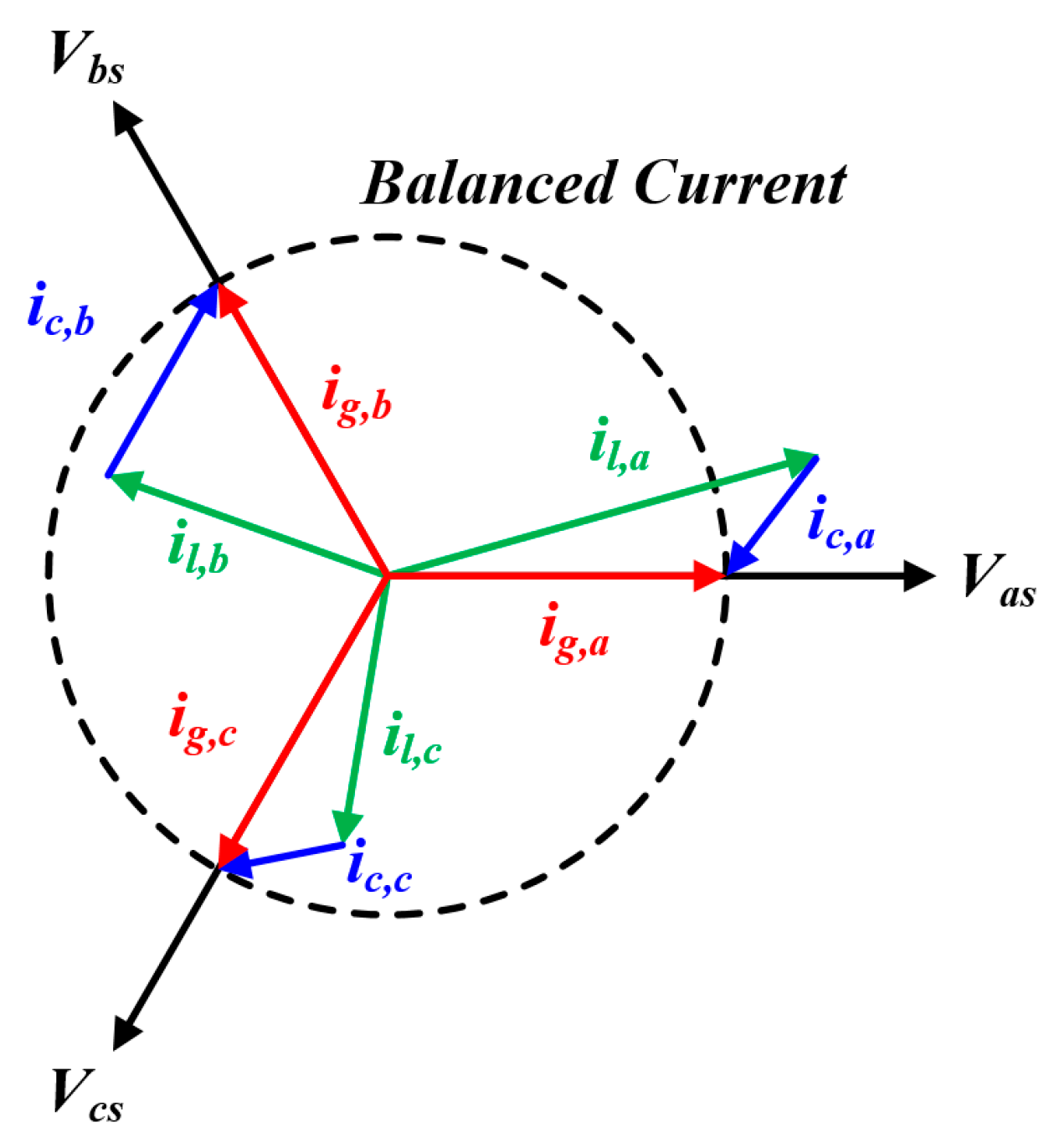
2. Conventional Grid Current Compensation under Unbalanced Load Conditions
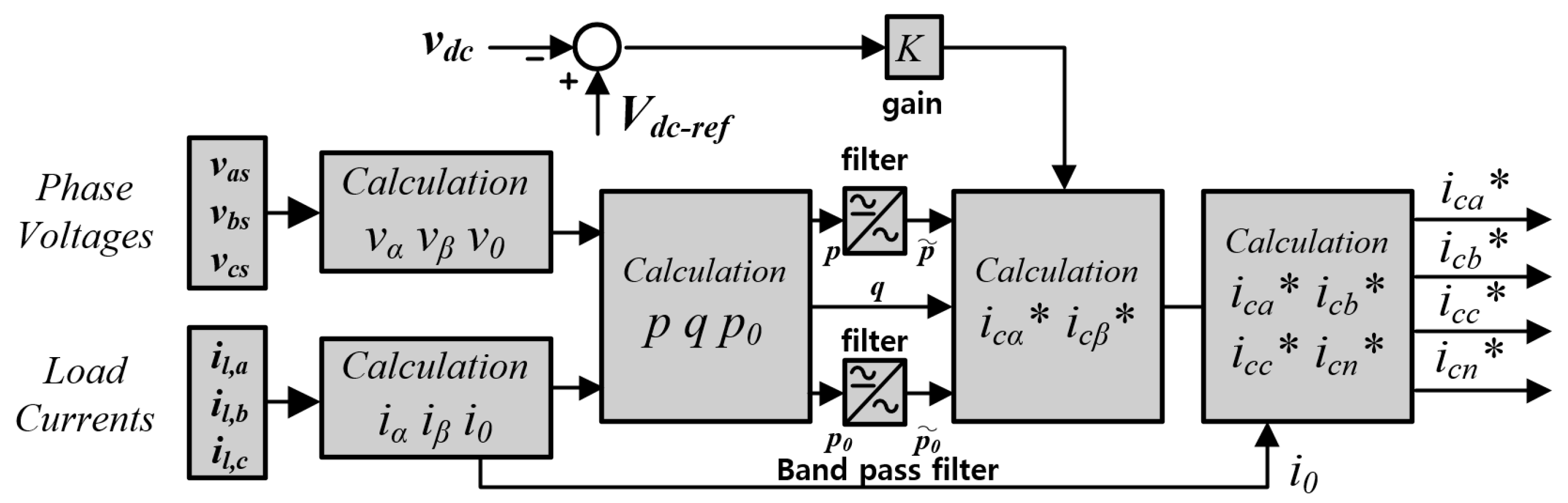
2.1. LUC Based on the P-Q Theory
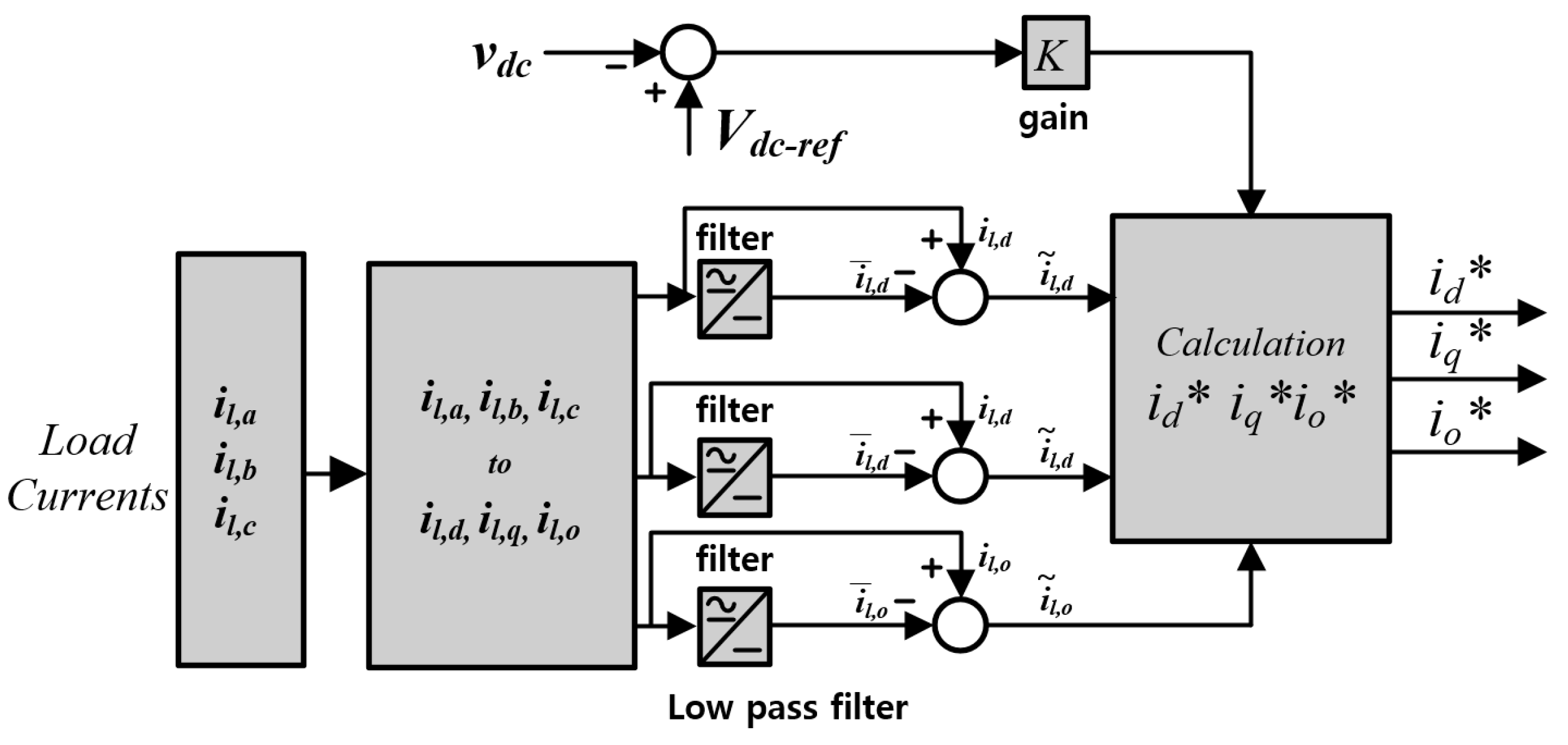
2.2. LUC Based on the Synchronous Frame Theory
3. Proposed Current Compensation Method Using ANN
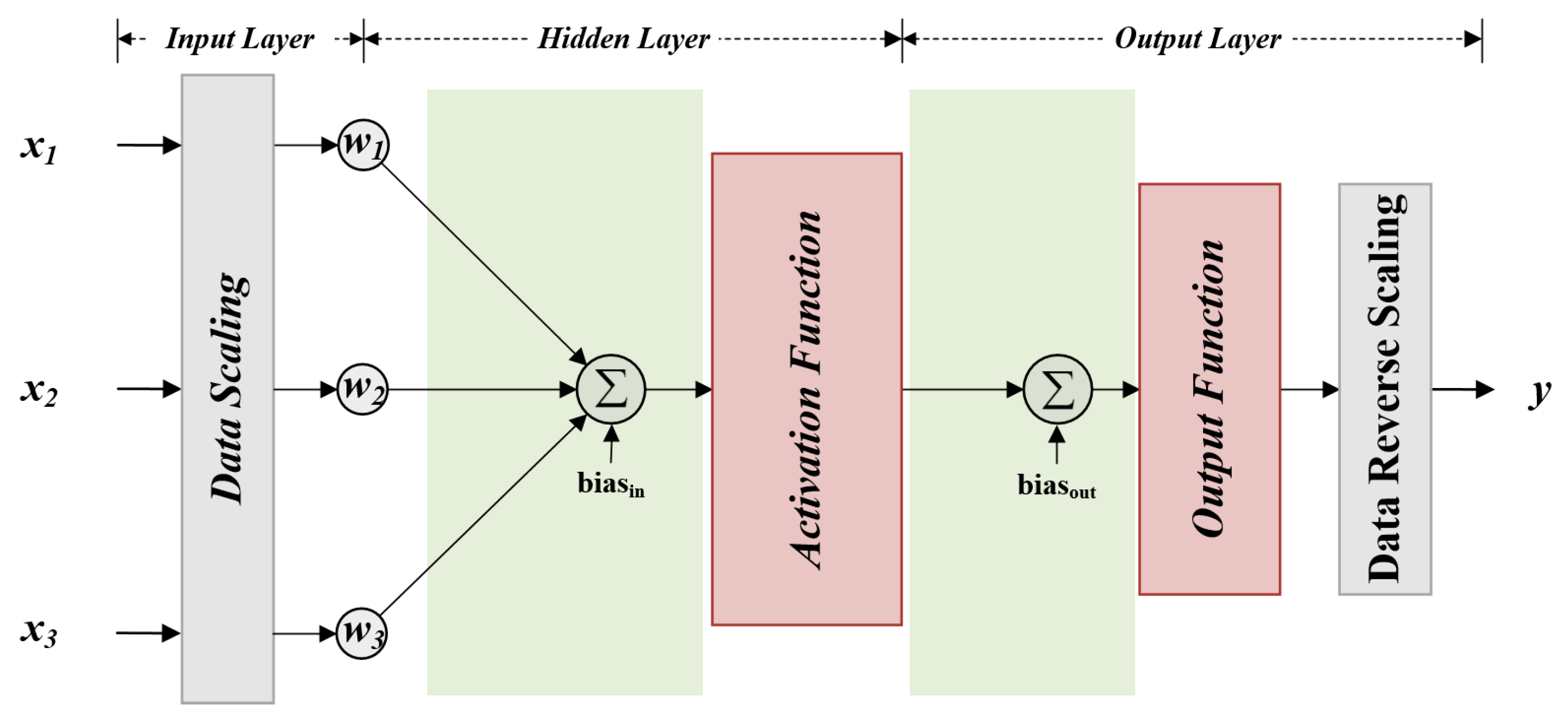
3.1. Designing the ANN Structure using MATLAB
- (1)
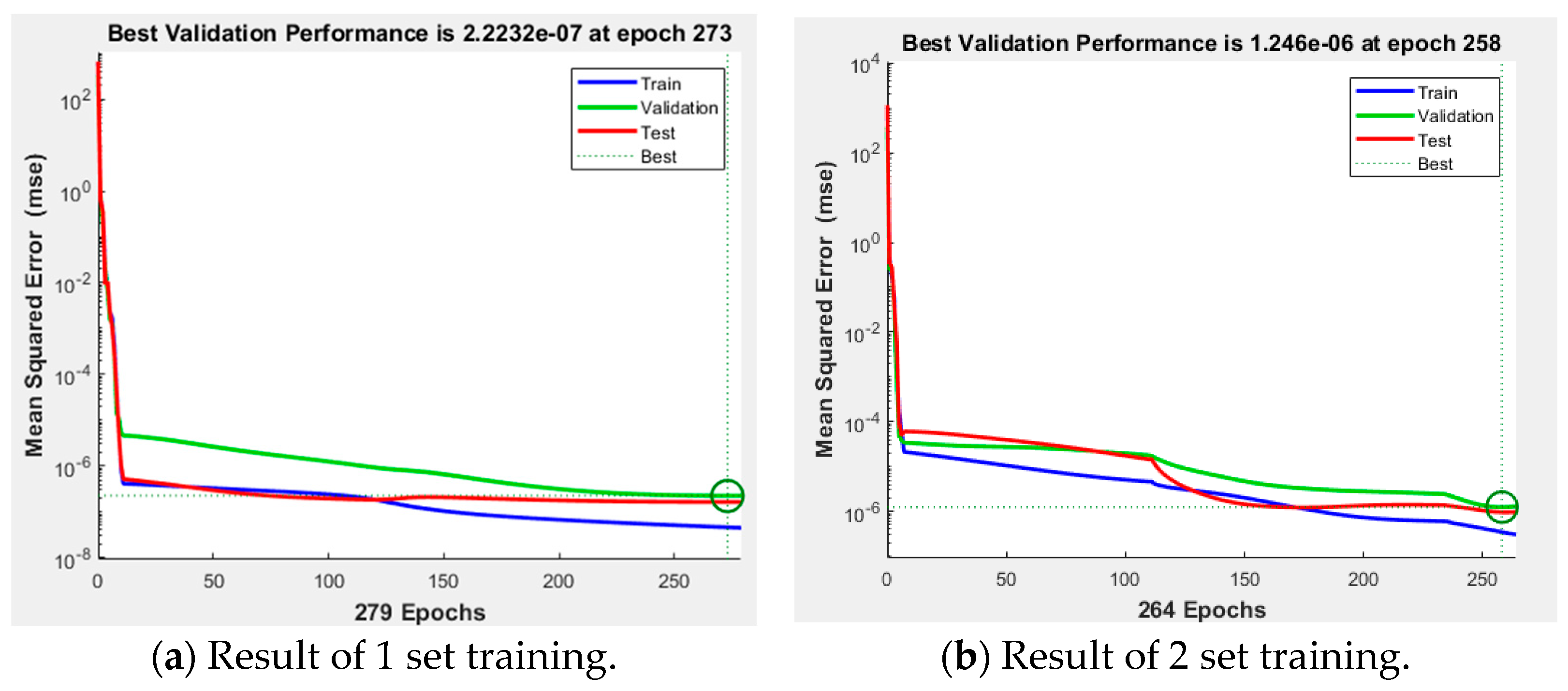
- Step 1: training data ratio validation
- (2)
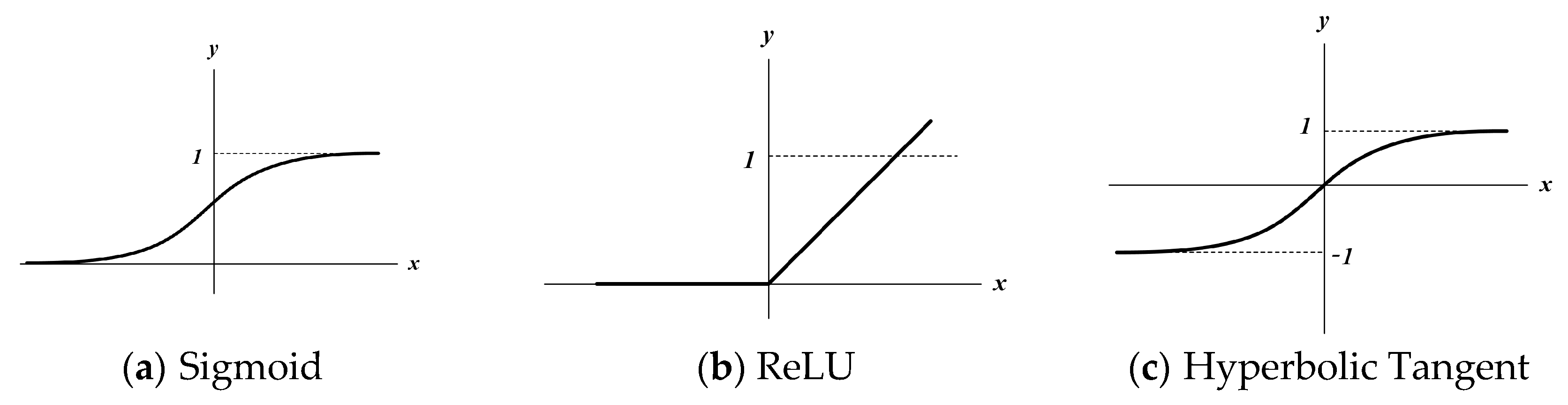
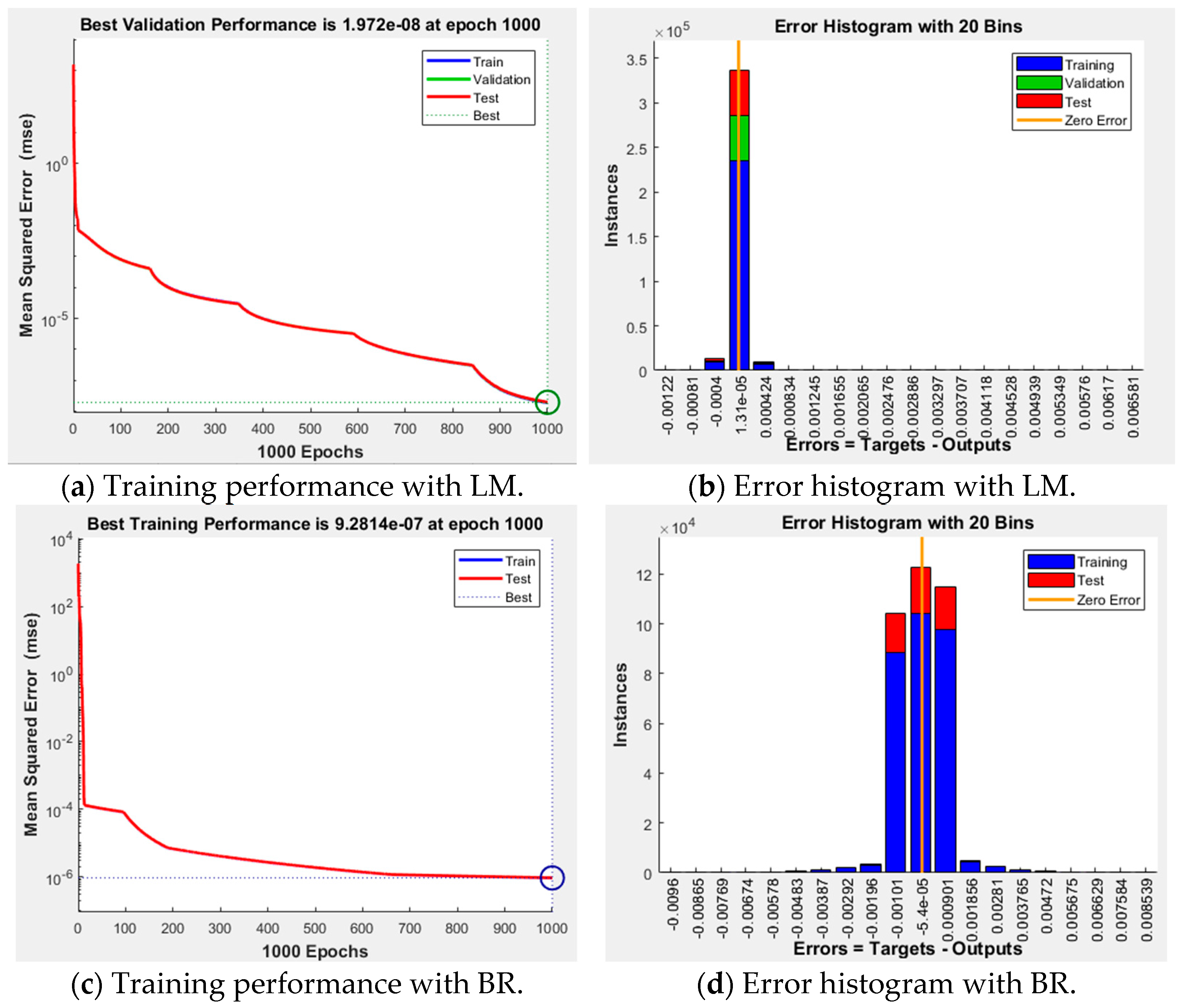
- Step 2: training algorithm validation
- -
- Levenberg–Marquardt algorithm: The LM method combines the Gauss–Newton and gradient descent methods to efficiently determine both global and local minima. Although this offers both stability and faster convergence, it requires significant computational effort to determine initial values when they are not provided.
- -
- Bayesian regularization: This method trains a neural network to minimize errors only for the provided training data, which may lead to over-confidence. Although BR considers uncertainty and enhances robustness against noise or inputs beyond the training data, it tends to have a slower convergence. Additionally, it may produce different outputs for the same parameters owing to its consideration of uncertainty.
- -
- Scaled conjugate gradient method: Introduced by Moller, the SCG method differs from other conjugate gradient algorithms in that it does not recalculate at each iteration and performs backpropagation with a second-order approximation of the error. This approach ensures the robustness and independence of the neural network from user-defined training data. However, the approach is complex and requires substantial computational resources and training times.
- (3)
- Step 3: number of neural validations
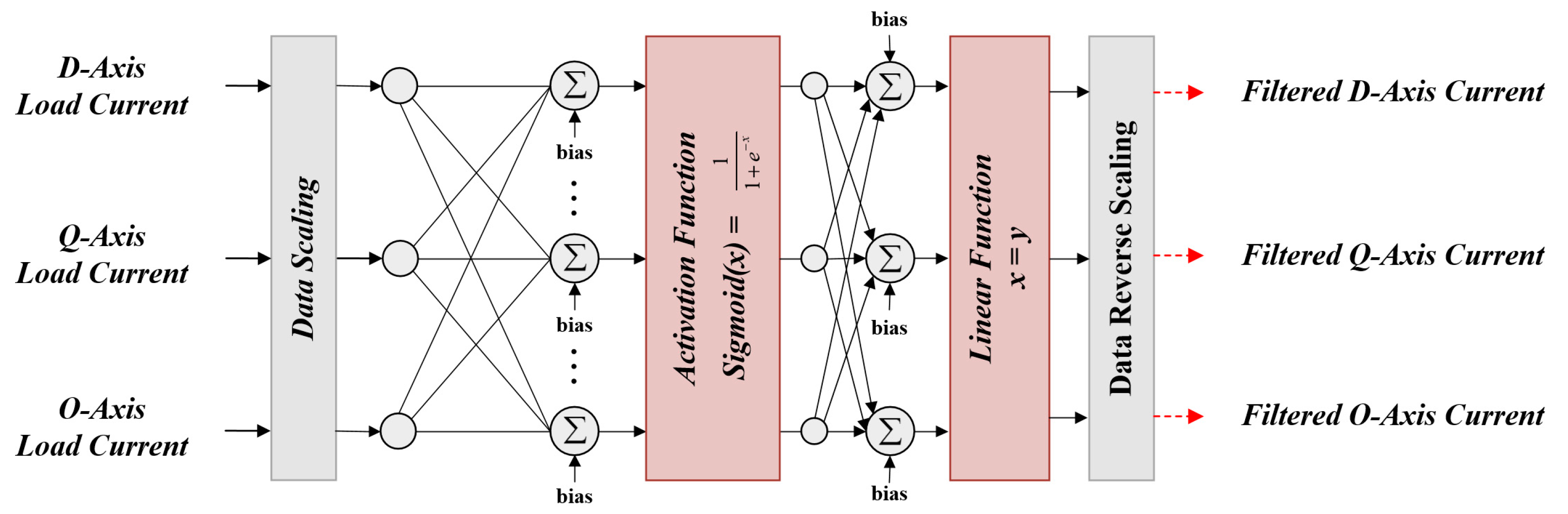
3.2. Designing an ANN for the Calculation of Current Reference under Unbalanced Load Conditions
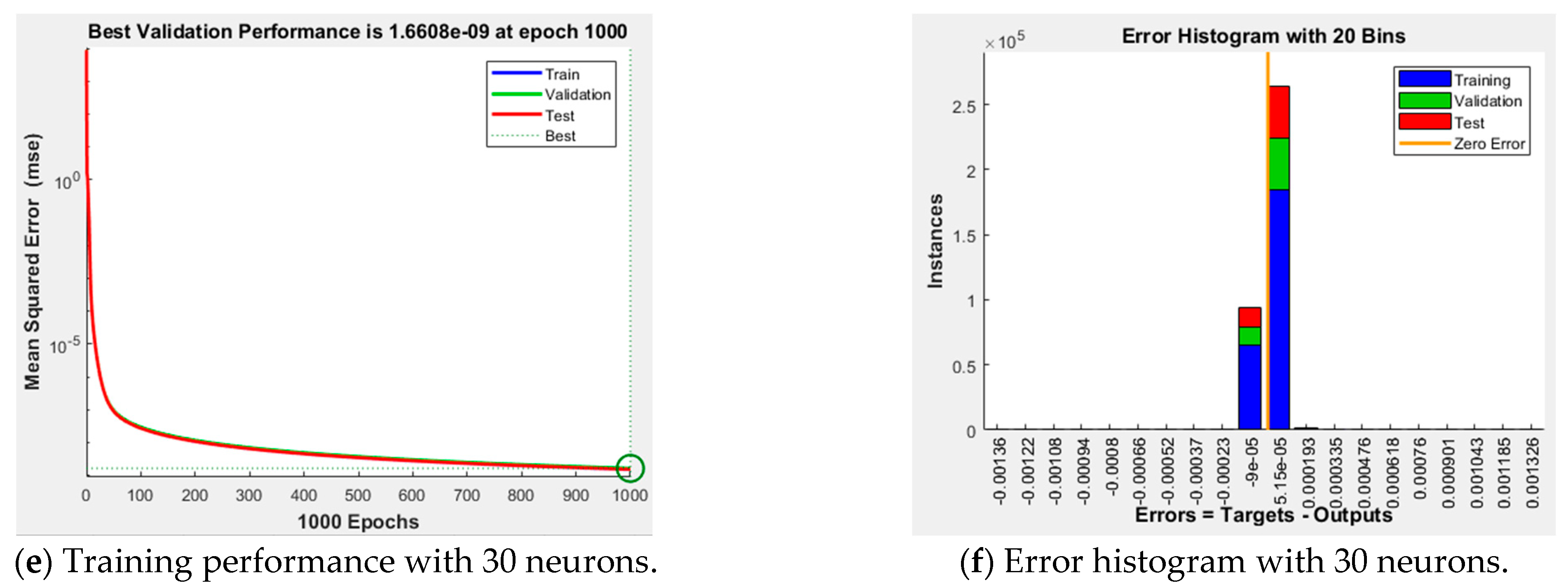
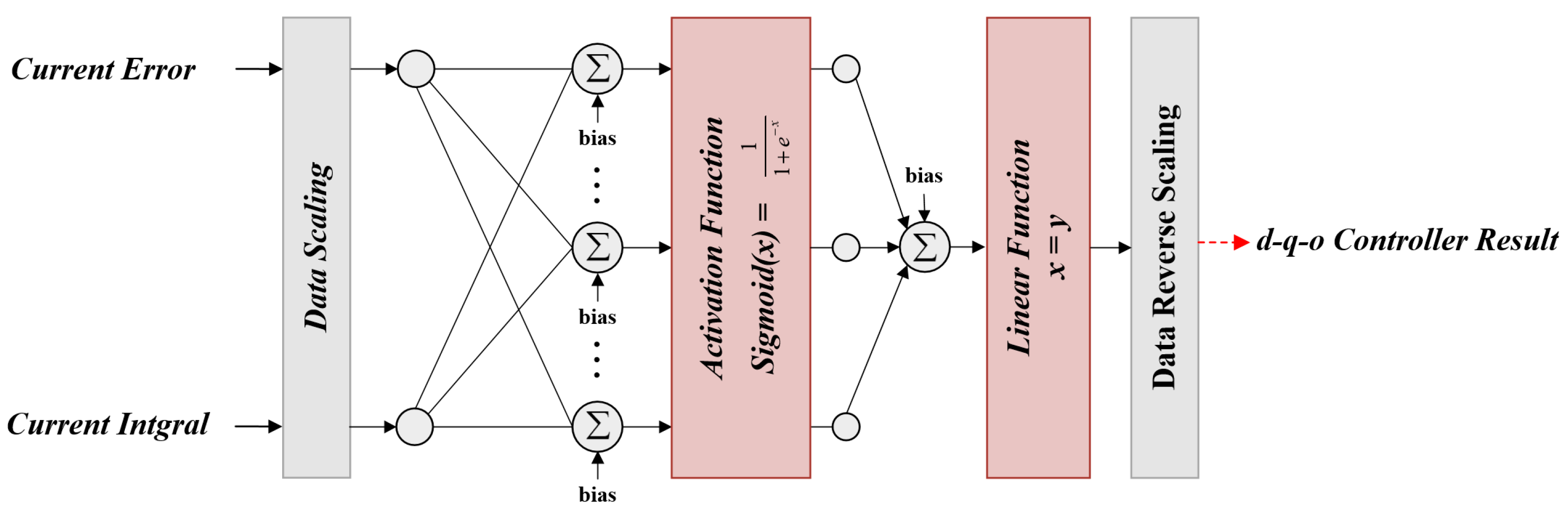
3.3. Designing an ANN for the Current Controller in the dq0 Axis
4. Simulation Results
4.1. Case 1 (LPF-Based dq0 Reference Generation and PI Current Controller)
4.2. Case 2 (ANN dq0 Reference Generation and PI Current Controller)
4.3. Case 3 (ANN dq0 Reference Generation and ANN Current Controller)
5. Experimental Results
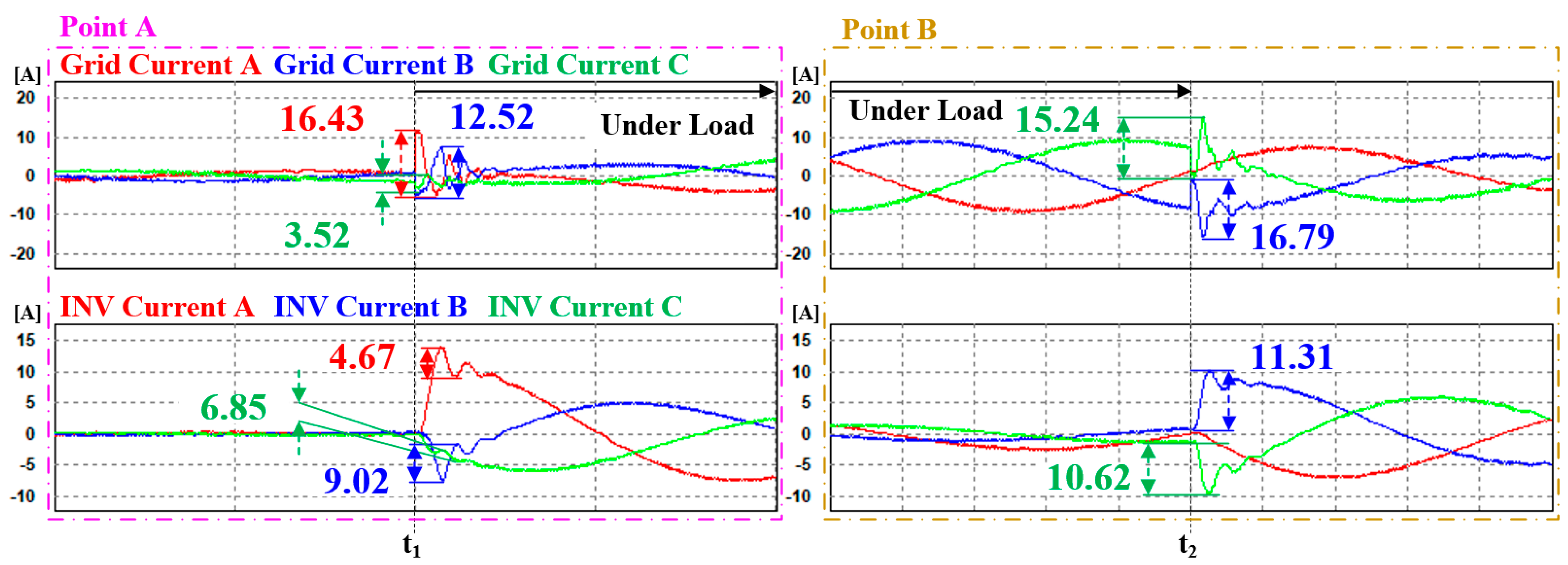
5.1. Case 1 (LPF-Based dq0 Reference Generation and a PI Current Controller)
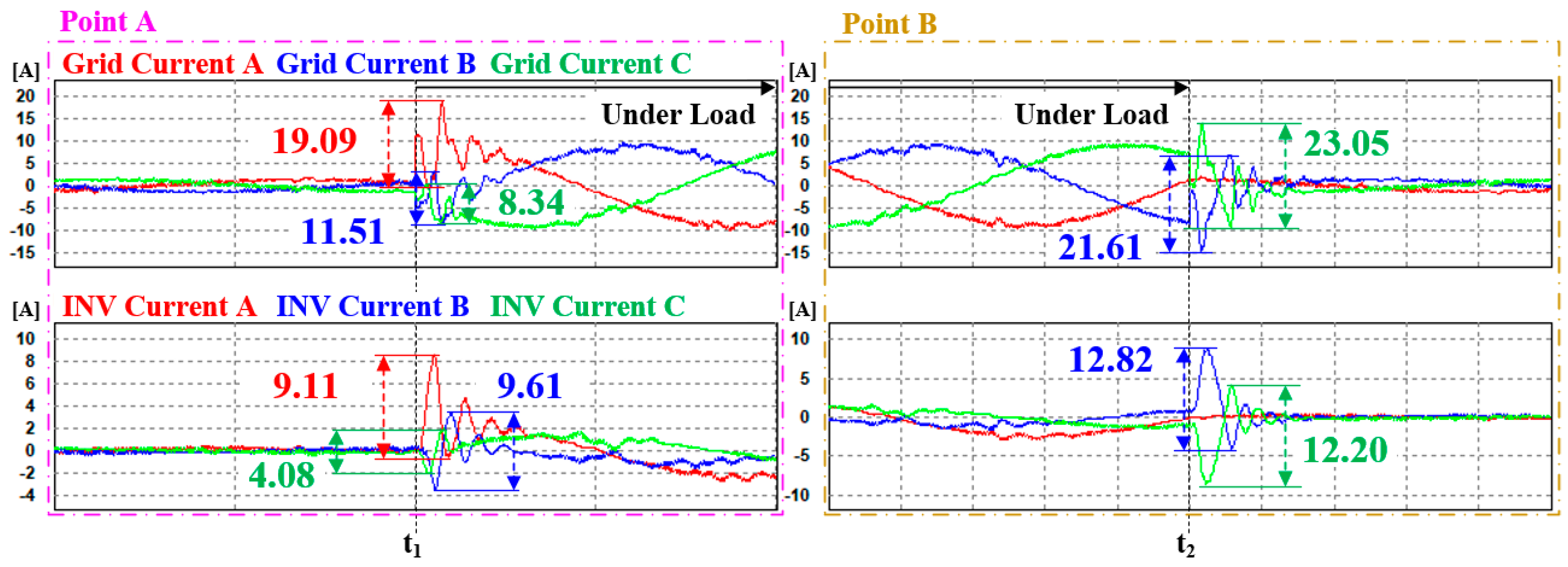
5.2. Case 2 (ANN dq0 Reference Generation and PI Current Controller)
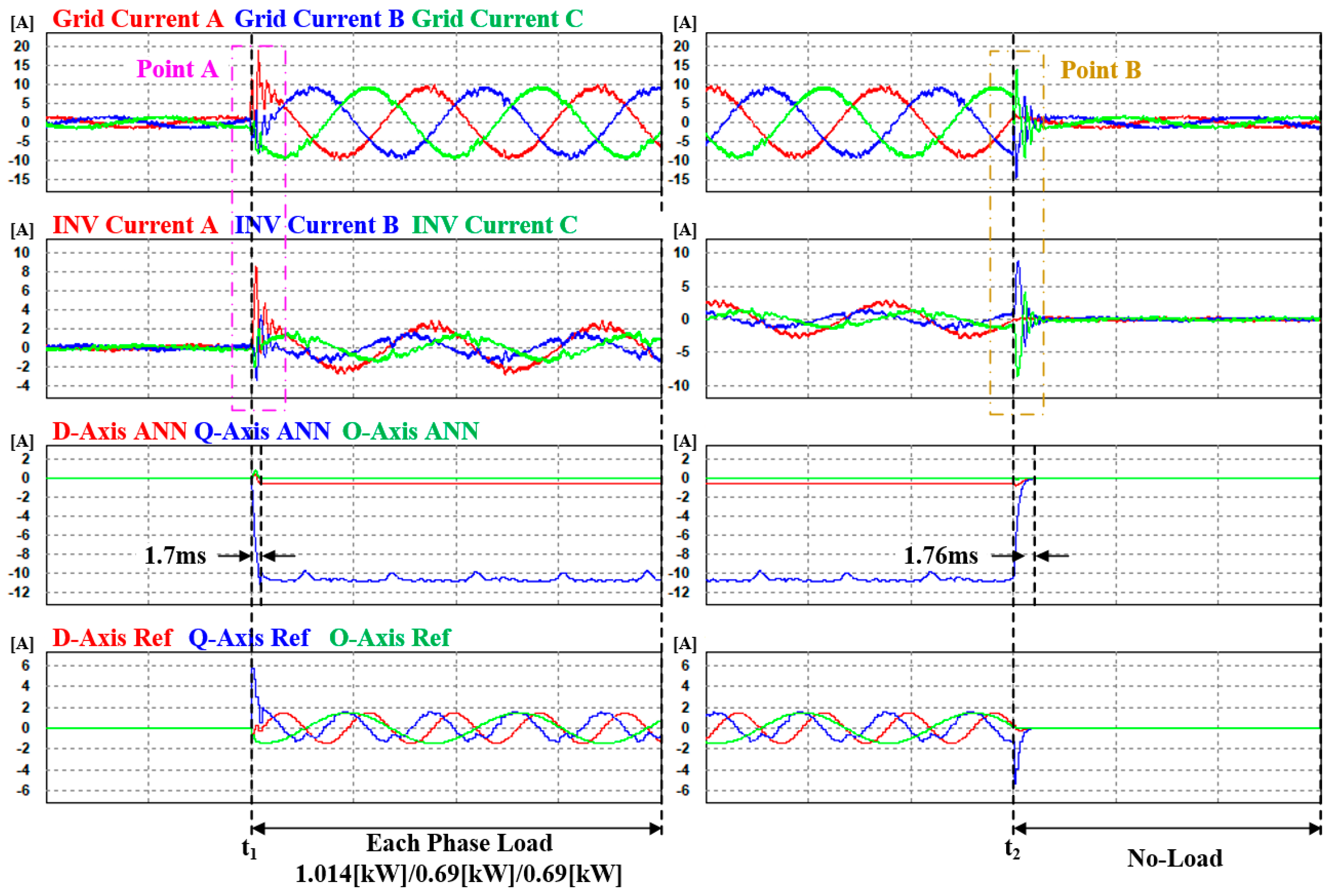
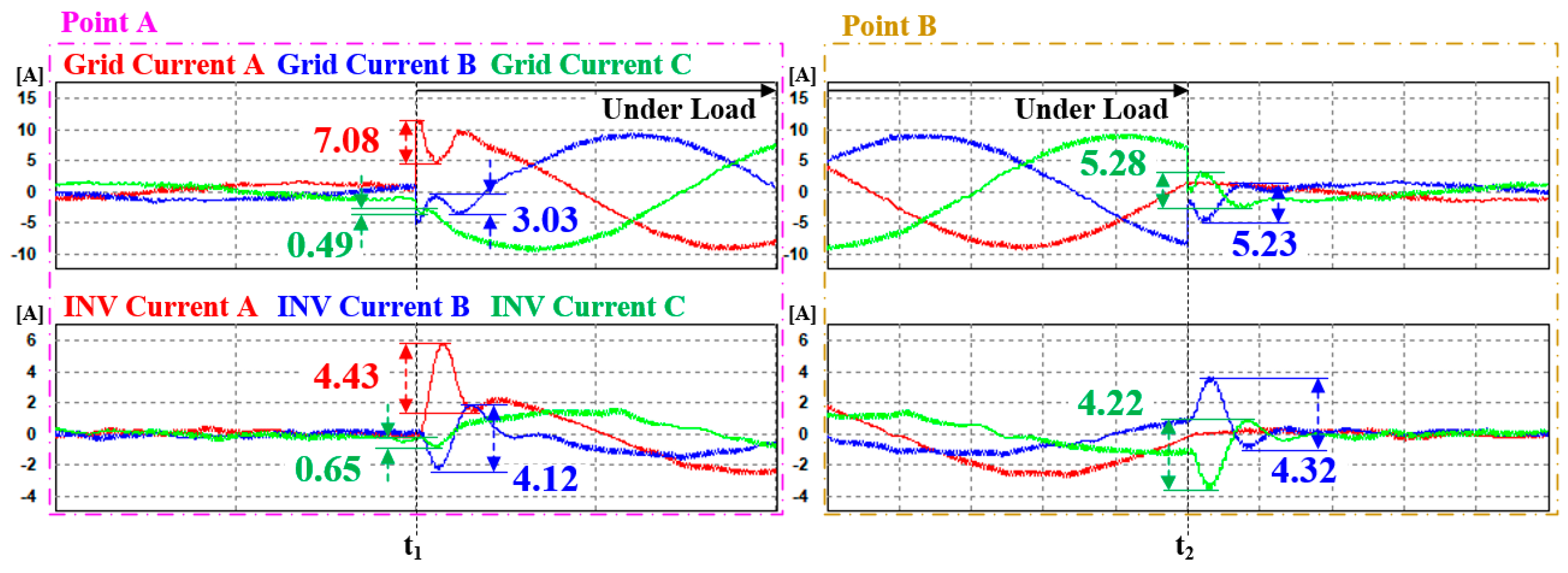
5.3. Case 3 (ANN dq0 Reference Generation and ANN Current Controller)
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, B.; Al-Haddad, K.; Chandra, A. A review of active filters for power quality improvement. IEEE Trans. Ind. Electron. 1999, 46, 960–971. [Google Scholar] [CrossRef]
- Rafi, F.H.M.; Hossain, M.J.; Rahman, M.S.; Taghizadeh, S. An overview of unbalance compensation techniques using power electronic converters for active distribution systems with renewable generation. Renew. Sustain. Energy Rev. 2020, 125, 109812. [Google Scholar] [CrossRef]
- Inzunza, R.; Akagi, H. A 6.6-kV transformerless shunt hybrid active filter for installation on a power distribution system. IEEE Trans. Power Electron. 2005, 20, 893–900. [Google Scholar] [CrossRef]
- Torabi Jafrodi, S.; Ghanbari, M.; Mahmoudian, M.; Najafi, A.; Rodrigues, E.M.G.; Pouresmaeil, E. A Novel Control Strategy to Active Power Filter with Load Voltage Support Considering Current Harmonic Compensation. Appl. Sci. 2020, 10, 1664. [Google Scholar] [CrossRef]
- Herrera, R.S.; Salmeron, P.; Vazquez, J.R.; Litran, S.P.; Perez, A. Generalized instantaneous reactive power theory in poly-phase power systems. In Proceedings of the 2009 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Chen, M.; Jie, Y.; Wang, C.; Li, G.; Qiu, L.; Zhong, W. Optimized Reactive Power Control of Module Power Imbalance of Cascaded Converter. IEEE Open J. Power Electron. 2022, 3, 2–12. [Google Scholar] [CrossRef]
- Jones, V.; Balda, J.C.; Adapa, R. Current Compensators for Unbalanced Electric Distribution Systems. In Proceedings of the 2018 IEEE Electronic Power Grid (eGrid), Charleston, SC, USA, 12–14 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Vijay, A.S.; Doolla, S.; Chandorkar, M.C. Unbalance mitigation strategies in microgrids. IET Power Electron. 2020, 13, 1687–1710. [Google Scholar] [CrossRef]
- Hintz, A.; Prasanna, U.R.; Rajashekara, K. Comparative Study of the Three-Phase Grid-Connected Inverter Sharing Unbalanced Three-Phase and/or Single-Phase systems. IEEE Trans. Ind. Appl. 2016, 52, 5156–5164. [Google Scholar] [CrossRef]
- Siddartha, A.N.R.S.; Basu, T.S.; Chakraborty, C. A simple time domain approach for harmonic, load unbalance and reactive power compensation. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 8504–8509. [Google Scholar] [CrossRef]
- Lyu, W.; Wang, R.; Xu, W.; Mu, S.; Guo, R.; Liang, J.; Liu, Z.A. Novel Three Phase Unbalance Detection and Compensation method of Active Power Filter. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 418–422. [Google Scholar] [CrossRef]
- Verdelho, P.; Marques, G.D. An active power filter and unbalanced current compensator. IEEE Trans. Ind. Electron. 1997, 44, 321–328. [Google Scholar] [CrossRef]
- Afonso, J.; Couto, C.; Martins, J. Active Filters with Control based on the p-q Theory. IEEE Ind. Electron. Soc. Newsl. 2000, 47, 5–10. [Google Scholar]
- Baeckeland, N.; Venkatramanan, D.; Kleemann, M.; Dhople, S. Stationary-Frame Grid-Forming Inverter Control Architectures for Unbalanced Fault-Current Limiting. IEEE Trans. Energy Convers. 2022, 37, 2813–2825. [Google Scholar] [CrossRef]
- Roiu, D.; Bojoi, R.I.; Limongi, L.R.; Tenconi, A. New Stationary Frame Control Scheme for Three-Phase PWM Rectifiers Under Unbalanced Voltage Dips Conditions. IEEE Trans. Ind. Appl. 2010, 46, 268–277. [Google Scholar] [CrossRef]
- Somkun, S.; Chunkag, V. Unified Unbalanced Synchronous Reference Frame Current Control for Single-Phase Grid-Connected Voltage-Source Converters. IEEE Trans. Ind. Electron. 2016, 63, 5425–5436. [Google Scholar] [CrossRef]
- Kesler, M.; Ozdemir, E. Synchronous-Reference-Frame-Based Control Method for UPQC Under Unbalanced and Distorted Load Conditions. IEEE Trans. Ind. Electron. 2011, 58, 3967–3975. [Google Scholar] [CrossRef]
- Wang, L.; Lam, C.-S.; Wong, M.-C. Unbalanced Control Strategy for A Thyristor-Controlled LC-Coupling Hybrid Active Power Filter in Three-Phase Three-Wire Systems. IEEE Trans. Power Electron. 2017, 32, 1056–1069. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, B.; Xu, D.; Cheng, M.; Xu, L. DC-Link Current Ripple Mitigation for Current-Source Grid-Connected Converters Under Unbalanced Grid Conditions. IEEE Trans. Ind. Electron. 2016, 63, 4967–4977. [Google Scholar] [CrossRef]
- Herrera, R.S.; Salmerón, P.; Kim, H. Instantaneous Reactive Power Theory Applied to Active Power Filter Compensation: Different Approaches, Assessment, and Experimental Results. IEEE Trans. Ind. Electron. 2008, 55, 184–196. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chakraborty, C.; Bhattacharya, S. Shunt compensation. IEEE Ind. Electron. Mag. 2009, 3, 38–49. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S.; Fu, X.; Dong, W.; Ramezani, M.; Balasubramanian, B. Approximate dynamic programming vector controllers for operation of IPM motors in linear and overmodulation regions. IEEE Trans. Transp. Electrif. 2020, 7, 659–670. [Google Scholar] [CrossRef]
- Dong, W.; Li, S.; Fu, X.; Li, Z.; Fairbank, M.; Gao, Y. Control of a buck DC/DC converter using approximate dynamic programming and artificial neural networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1760–1768. [Google Scholar] [CrossRef]
- Gupta, N.; Singh, S.P.; Dubey, S.P. Neural network based shunt active filter for harmonic and reactive power compensation under non-ideal mains voltage. In Proceedings of the 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010. [Google Scholar]
- Fang, Z.P.; Lai, J.-S. Generalized instantaneous reactive power theory for three-phase power systems. IEEE Trans. Instrum. Meas. 1996, 45, 293–297. [Google Scholar] [CrossRef]
- George, J.; Jose, T.L.; Jacob, J. A decoupled reference generation algorithm for harmonic, reactive power and current unbalance compensation in three-phase systems. In Proceedings of the 2011 Annual IEEE India Conference, Hyderabad, India, 16–18 December 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Kim, G.-H.; Hwang, C.; Jeon, J.-H.; Ahn, J.-B.; Kim, E.S. A novel three-phase four-leg inverter based load unbalance compensator for stand-alone microgrid. Int. J. Electr. Power Energy Syst. 2015, 65, 70–75. [Google Scholar] [CrossRef]
- Kim, S.-H. An Energy Management Method Using ANN and Hierarchical Control for Bipolar DC Microgrid Based on Droop Control. Ph.D. Thesis, Sungkyunkwan University Graduate School, Seoul, Republic of Korea, 2023. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples (%) | MSE (Mean Square Error) | R | ||
|---|---|---|---|---|
| 1 Set | Training | 70 | 4.55392 × 10−8 | 9.99999 × 10−1 |
| Validation | 15 | 2.22321 × 10−7 | 9.99999 × 10−1 | |
| Testing | 15 | 1.63285 × 10−7 | 9.99999 × 10−1 | |
| 2 Set | Training | 90 | 3.44847 × 10−7 | 9.99999 × 10−1 |
| Validation | 5 | 1.24599 × 10−6 | 9.99999 × 10−1 | |
| Testing | 5 | 9.57606 × 10−7 | 9.99999 × 10−1 |
| Training Performance | Error Histogram | |
|---|---|---|
| Levenberg–Marquardt | 1.972 × 10−8 | 1.31 × 10−5 |
| Bayesian Regularization | 9.2814 × 10−7 | −5.4 × 10−5 |
| SCG Method | 0.0048582 | −0.1241 |
| Input Data | Output Data | ||||
|---|---|---|---|---|---|
| Ide | Iqe | Ioe | Ide_ref | Iqe_ref | Ioe_ref |
| −0.881433331 | −9.342378775 | −0.181107398 | −6.01 × 10−1 | −10.781192 | 0.000155916 |
| −0.661866636 | −9.316670329 | −0.070921802 | −6.01 × 10−1 | −10.781192 | 0.000155916 |
| −0.440898051 | −9.324221858 | 0.039687159 | −6.01 × 10−1 | −10.781192 | 0.000155916 |
| …… | |||||
| −2.942782404 | −9.855400085 | −1.241158981 | −0.77460625 | −13.886127 | 0.000126828 |
| −2.312665572 | −9.575398404 | −0.905744661 | −0.77460625 | −13.886127 | 0.000126828 |
| −1.647599185 | −9.393269653 | −0.565187099 | −0.77460625 | −13.886127 | 0.000126828 |
| Input Data | Output Data | |||||||
|---|---|---|---|---|---|---|---|---|
| Error D-Axis | Integral D-Axis | Error Q-Axis | Integral Q-Axis | Error O-Axis | Integral O-Axis | D-Axis | Q-Axis | O-Axis |
| 0.065365 | 12.41371 | −0.0188 | −358.686 | 0.074611 | 0.390667 | 13.72101 | −359.062 | 1.882889 |
| 0.07662 | 12.5265 | −0.0413 | −358.738 | 0.034672 | 0.45742 | 14.05891 | −359.564 | 1.150865 |
| 0.041886 | 12.50608 | −0.04018 | −358.977 | 0.038226 | 0.616964 | 13.34381 | −359.781 | 1.38149 |
| ∙ ∙ ∙ ∙ | ||||||||
| 0.059906 | 12.49728 | −0.07878 | −358.877 | 0.076294 | 0.651035 | 13.69541 | −360.452 | 2.176914 |
| 0.06789 | 12.1754 | 0.006137 | −358.662 | −0.04231 | −0.22027 | 13.53321 | −358.54 | −1.06654 |
| −0.00376 | 11.72399 | 0.075598 | −359.193 | −0.06424 | 0.526357 | 11.64879 | −357.681 | −0.75839 |
| Training Performance | Dominant Error Histogram | |
|---|---|---|
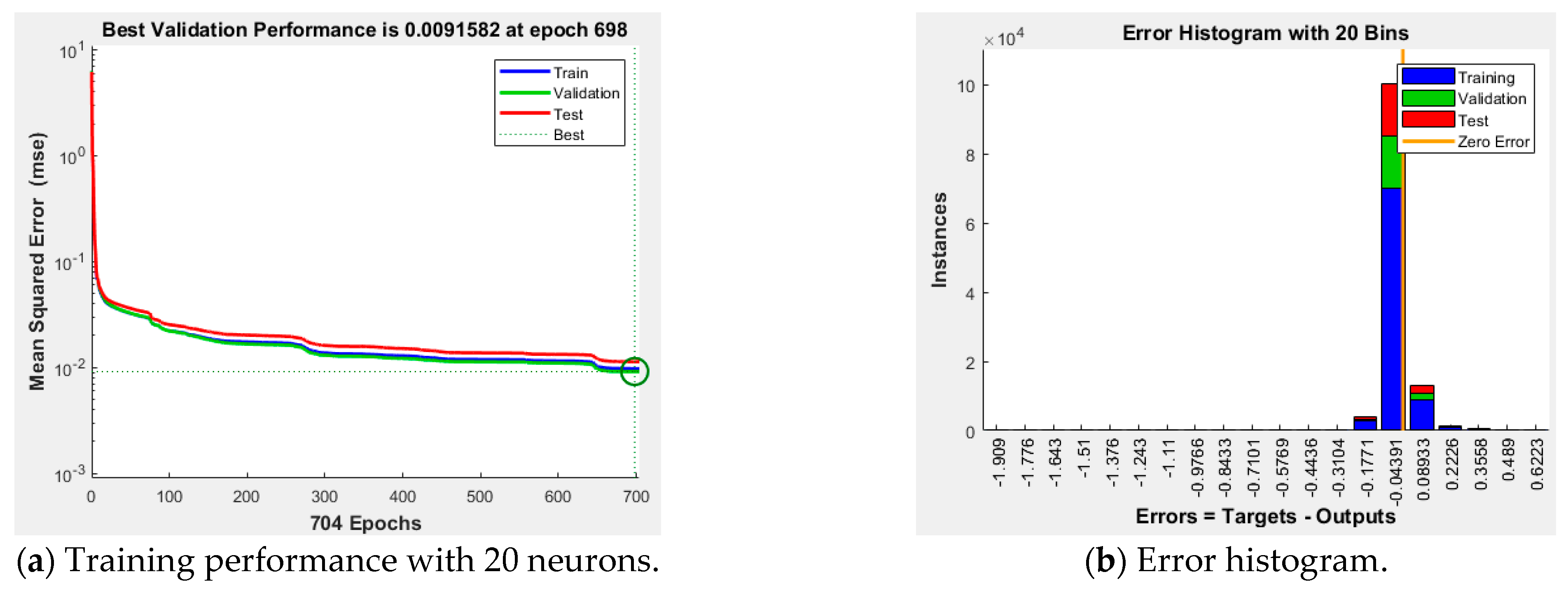
| Unbalance calculation | 0.0091582 | −0.04391 |
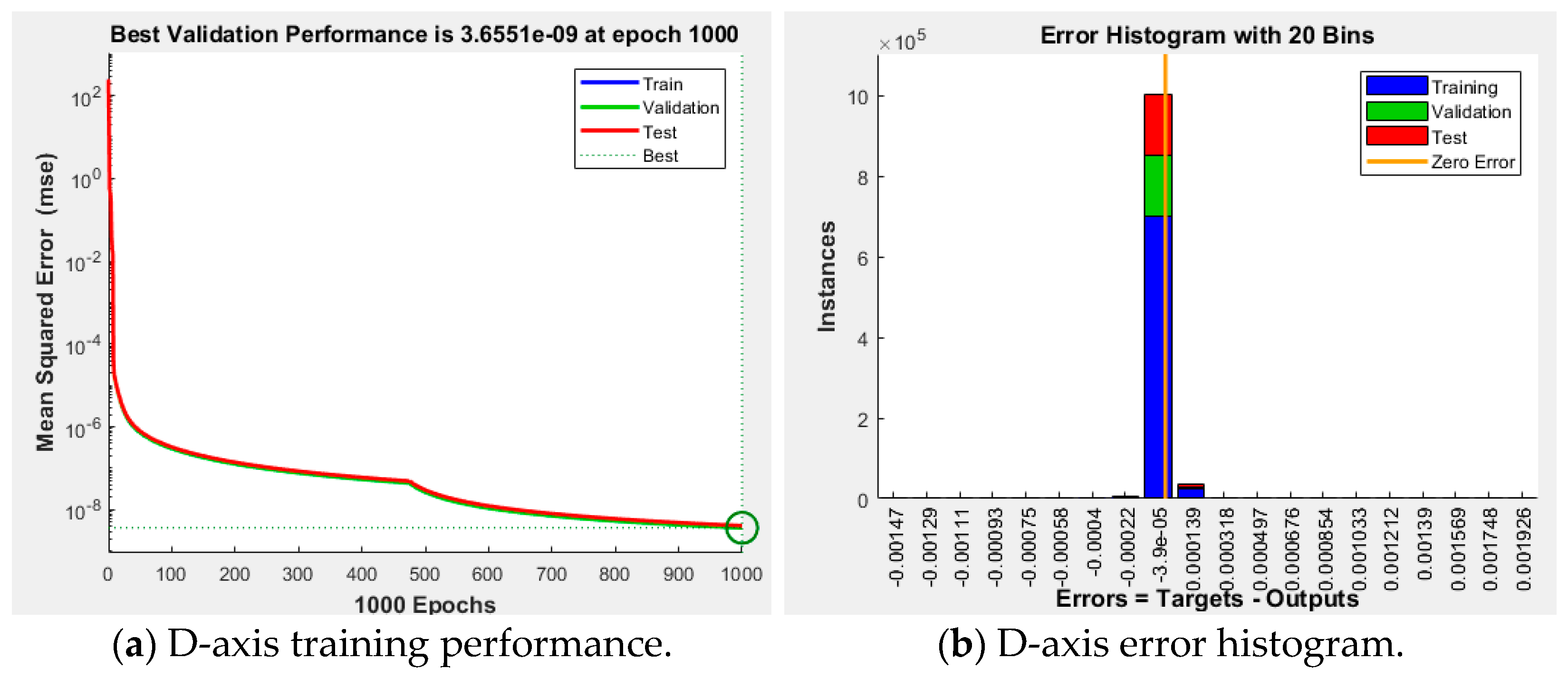
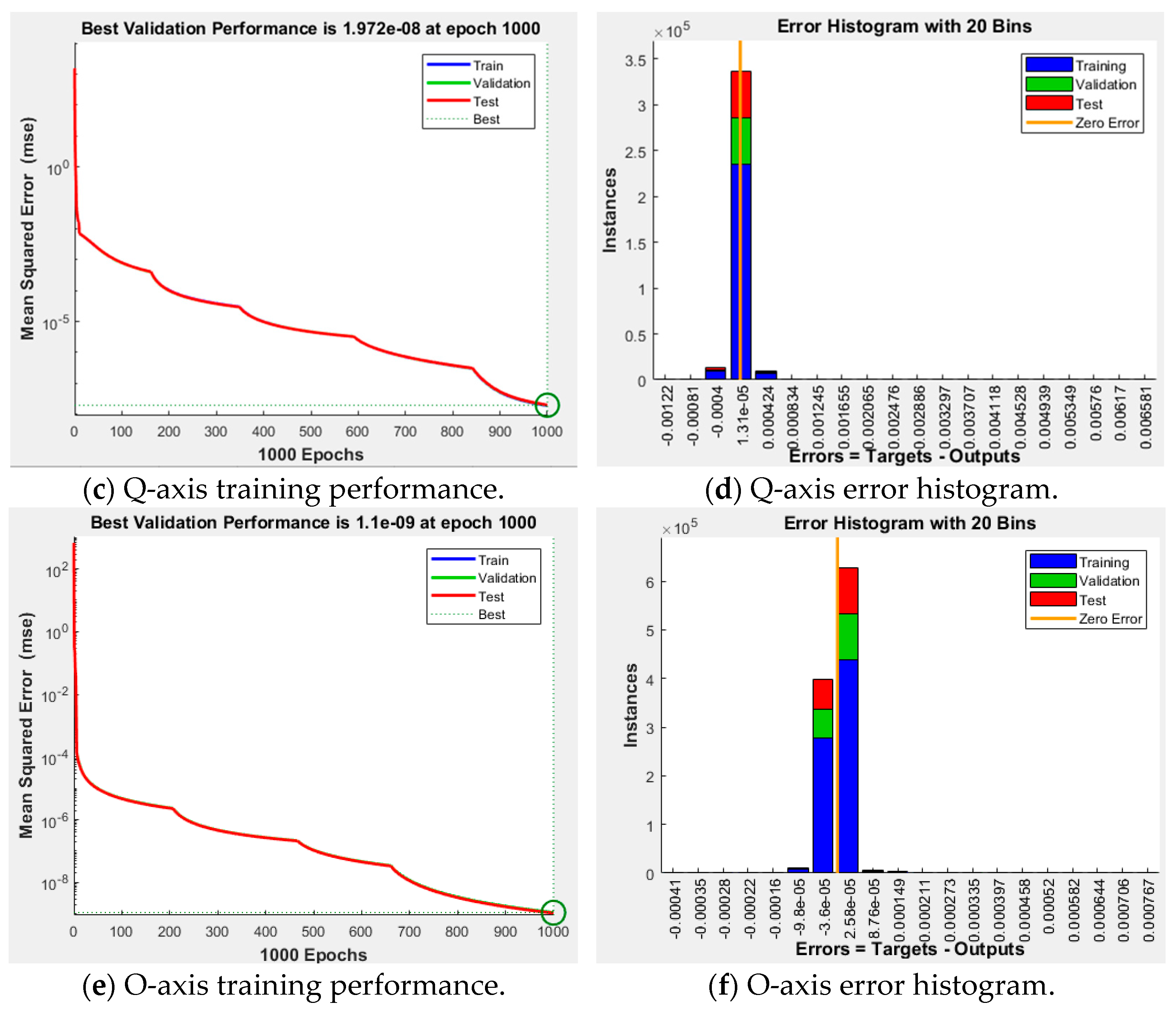
| d-axis controller | 3.6551 × 10−9 | −3.9 × 10−5 |
| q-axis controller | 1.972 × 10−8 | 1.31 × 10−5 |
| o-axis controller | 1.19 × 10−9 | 2.58 × 10−5 |
| Parameters | Values | Unit | |
|---|---|---|---|
| Grid Line to Line Voltage | 220 | ||
| DC-Link Voltage | 380 | ||
| AC Load | A Phase | 1.014 | kW |
| B Phase | 0.69 | kW | |
| C Phase | 0.69 | kW | |
| Inverter Rated Power | 20 | kW | |
| LCL Filter | Grid Inductance | 100 | μH |
| Filter Capacitance | 22 | μF | |
| Converter Inductance | 1500 | μH | |
| DC-Link Capacitance | 1200 | μF | |
| A Phase | B Phase | C Phase | Average | ||
|---|---|---|---|---|---|
| Point A [A] | Grid | 16.43 | 12.52 | 3.52 | 10.82 |
| Inverter | 4.67 | 9.02 | 6.85 | 6.85 | |
| Point B [A] | Grid | - | 16.79 | 15.24 | 16.02 |
| Inverter | - | 11.31 | 10.62 | 10.97 | |
| THD [%] | Grid | 3.365 | 3.409 | 3.451 | 3.41 |
| Inverter | 5.637 | 12.21 | 10.852 | 9.57 |
| A Phase | B Phase | C Phase | Average | ||
|---|---|---|---|---|---|
| Point A [A] | Grid | 19.09 | 11.51 | 8.34 | 12.98 |
| Inverter | 9.11 | 9.61 | 4.08 | 7.6 | |
| Point B [A] | Grid | - | 21.61 | 23.05 | 22.33 |
| Inverter | - | 12.82 | 12.2 | 12.51 | |
| THD [%] | Grid | 5.385 | 6.809 | 5.595 | 5.93 |
| Inverter | 9.41 | 30.24 | 28.11 | 22.59 |
| A Phase | B Phase | C Phase | Average | ||
|---|---|---|---|---|---|
| Point A [A] | Grid | 7.08 | 3.03 | 0.49 | 3.53 |
| Inverter | 4.43 | 4.12 | 0.65 | 3.07 | |
| Point B [A] | Grid | - | 5.23 | 5.28 | 5.26 |
| Inverter | - | 4.32 | 4.22 | 4.27 | |
| THD [%] | Grid | 3.46 | 3.44 | 3.5 | 3.47 |
| Inverter | 6.16 | 12.8 | 14.1 | 11.02 |
| Case 1 | Case 2 | Case 3 | ||
|---|---|---|---|---|
| Point A maximum ripple [A] | Grid | 10.82 | 12.98 | 3.53 |
| Inverter | 6.85 | 7.6 | 3.07 | |
| Point B maximum ripple [A] | Grid | 16.02 | 12.33 | 5.26 |
| Inverter | 10.97 | 12.51 | 4.27 | |
| Average THD [%] | Grid | 3.41 | 5.93 | 3.47 |
| Inverter | 9.57 | 22.59 | 11.02 | |
| Average steady state reaching time [s] | 0.1125 | 0.00173 | 0.00173 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, T.-G.; An, C.-G.; Yi, J.; Won, C.-Y. Current Compensation Method in a Distribution System Based on a Four-Leg Inverter under Unbalanced Load Conditions Using an Artificial Neural Network. Energies 2024, 17, 1325. https://doi.org/10.3390/en17061325
Kim T-G, An C-G, Yi J, Won C-Y. Current Compensation Method in a Distribution System Based on a Four-Leg Inverter under Unbalanced Load Conditions Using an Artificial Neural Network. Energies. 2024; 17(6):1325. https://doi.org/10.3390/en17061325
Chicago/Turabian StyleKim, Tae-Gyu, Chang-Gyun An, Junsin Yi, and Chung-Yuen Won. 2024. "Current Compensation Method in a Distribution System Based on a Four-Leg Inverter under Unbalanced Load Conditions Using an Artificial Neural Network" Energies 17, no. 6: 1325. https://doi.org/10.3390/en17061325
APA StyleKim, T.-G., An, C.-G., Yi, J., & Won, C.-Y. (2024). Current Compensation Method in a Distribution System Based on a Four-Leg Inverter under Unbalanced Load Conditions Using an Artificial Neural Network. Energies, 17(6), 1325. https://doi.org/10.3390/en17061325