
Strategies for Workplace EV Charging Management



Abstract
1. Introduction
1.1. Literature Overview
1.1.1. Charge Management
1.1.2. Integration with Renewable Energy Sources
1.1.3. Bidirectional Energy Exchange
1.2. Contribution of This Work
- What is the minimum number of charging points required to accommodate the charging needs of the vehicle fleet?
- How can charging infrastructure be designed to ensure equitable access for all vehicles?
- What are the operational and logistical implications of different charging strategies?
- Scenario 1 (CPs >= EVs):
- Focus on managing power availability limits from the grid.
- Strategies:
- ○
- Monitor key parameters (vehicle idle times, energy required).
- ○
- Modulate charging power.
- ○
- Manage start/end times of charging sessions.
- Scenario 2 (CPs < EVs):
- Focus on organizing access to CPs.
- Strategies:
- ○
- Monitor key parameters (vehicle idle times, energy required).
- ○
- Manage start/end times of charging sessions (CPs rotation).
- NOTE: logistics of the CPs’ accesses are not within the scope of the study.
- -
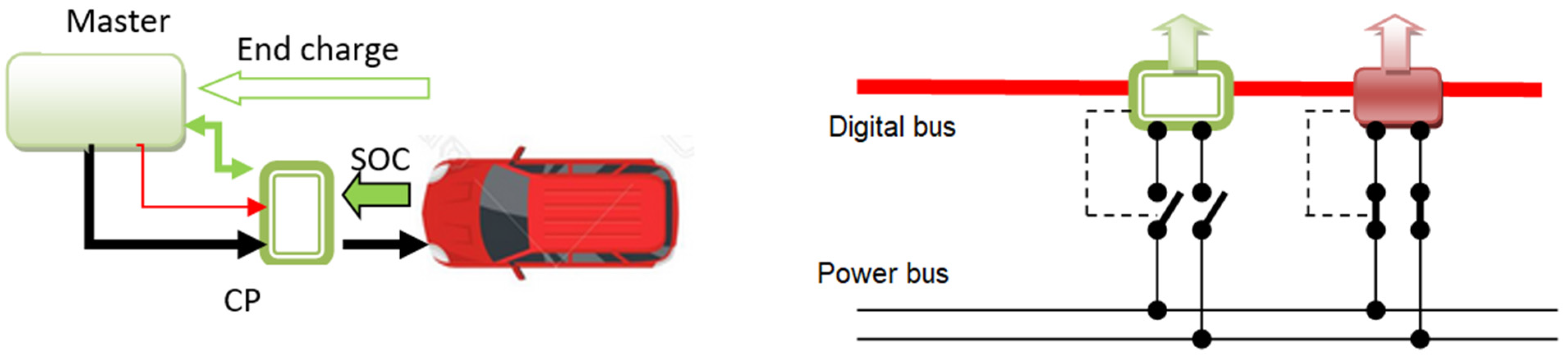
- Charging management relies on basic information from the vehicles. Specifically, the system gathers only the state of charge (SOC) and the battery size to assess charging needs.
- -
- While knowledge of the stop duration can enhance optimization, the methodology still performs well even without this information. No a priori knowledge of the arrival time is necessary.
- -
- Various configurations of CPs are analyzed regarding their quantity, layout, and the power they can deliver.
- -
- The proposed methodology is applicable in scenarios where the available power in the parking lot is limited. This is particularly important since installed capacity is constrained by the limitations of the power distribution system, especially in urban areas.
2. Materials and Methods
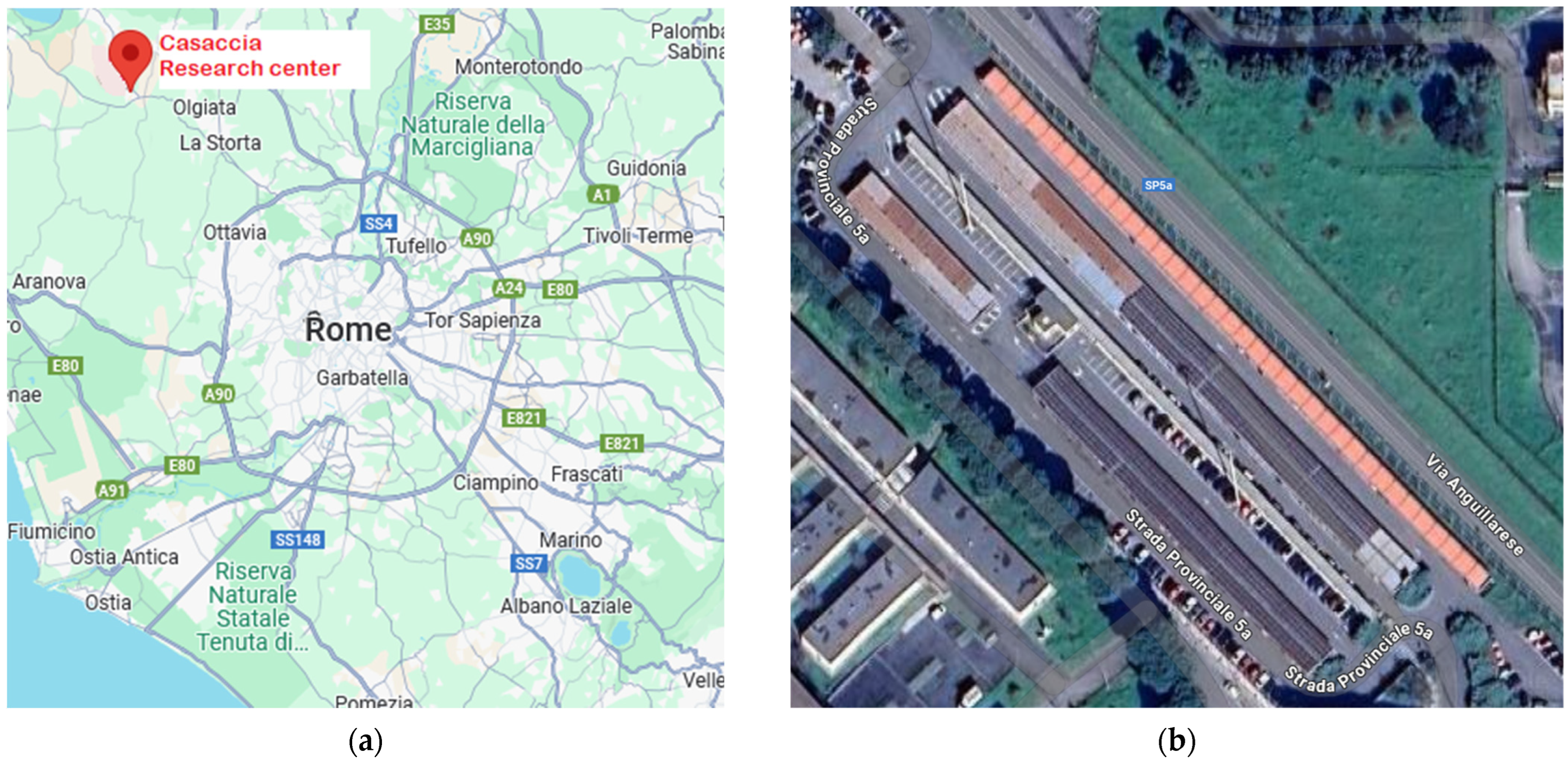
2.1. Data
- Terminal ID;
- Date Time: UTC timestamp of the recording (dd-mm-yyyy hh:mm:ss);
- Latitude: geographic coordinate in the WGS84 system in millionths of a degree;
- Longitude: geographic coordinate in the WGS84 system in millionths of a degree;
- Speed: instantaneous speed in km/h;
- Direction: direction of travel (in degrees 0 = North, 90 = East, 180 = South, 270 = West);
- Quality: GPS signal quality (1 = does not navigate, 2 = 2d, 3 = 3d);
- Status: status (0 = departure, 1 = motion, 2 = arrival);
- DeltaPos: distance in meters from the position of the previous point;
- Road: road type attributed by OctoTelematics (U = urban, E = extra-urban, A = highway).
- Trip ID.
- Terminal ID.
- Departure date and time.
- Starting position.
- Date and time of arrival.
- Arrival position.
- Distance travelled.
- Trip duration.
- Stop duration until next trip.
2.2. Methods
- Define the charging infrastructure scenario.
- Explore solutions that prioritize reducing the number of CPs in charging infrastructure.
- Identify feasible options that balance competing objectives.
- Note: it cannot guarantee absolute optimality but offers a practical and adaptable solution.
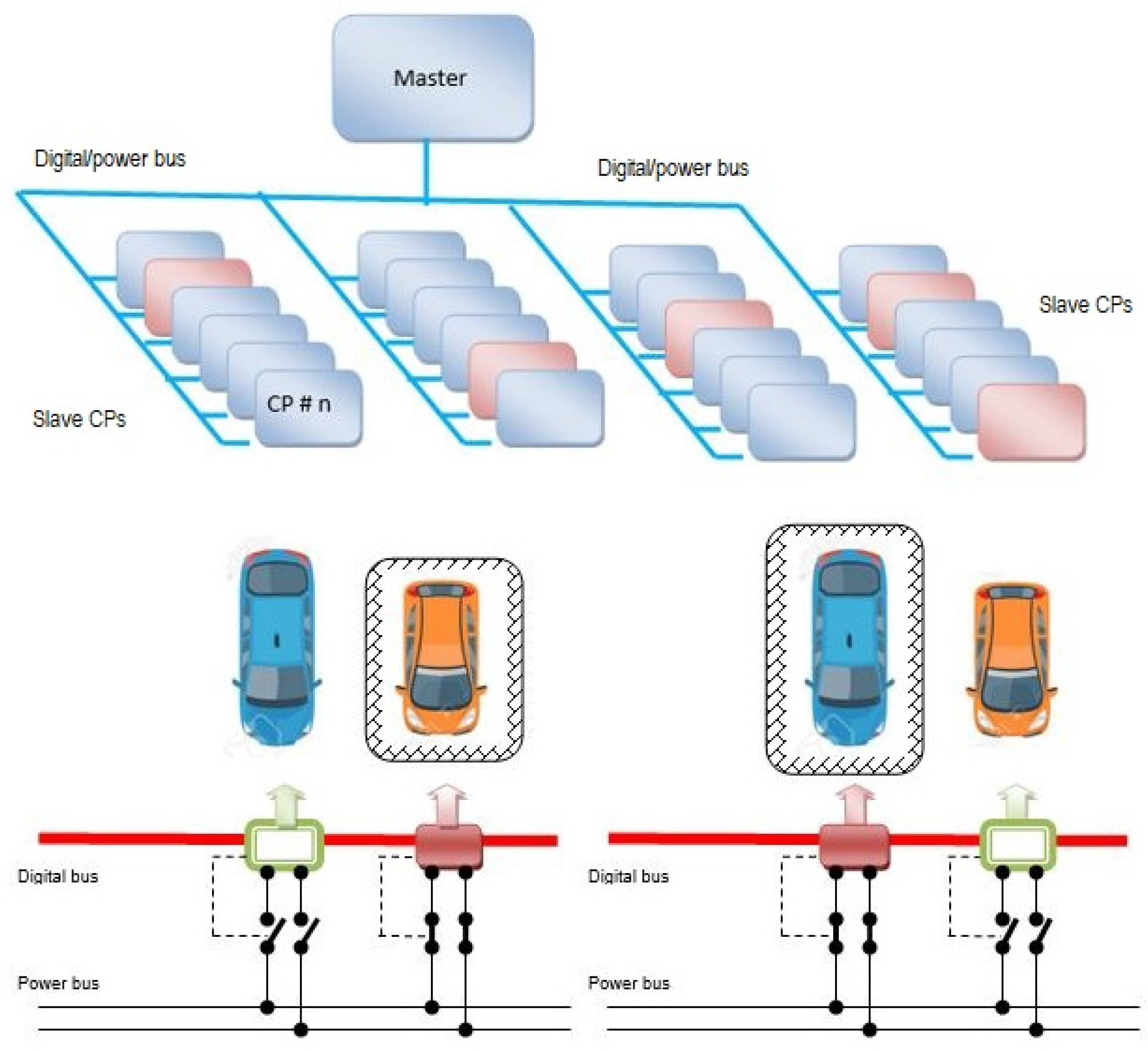
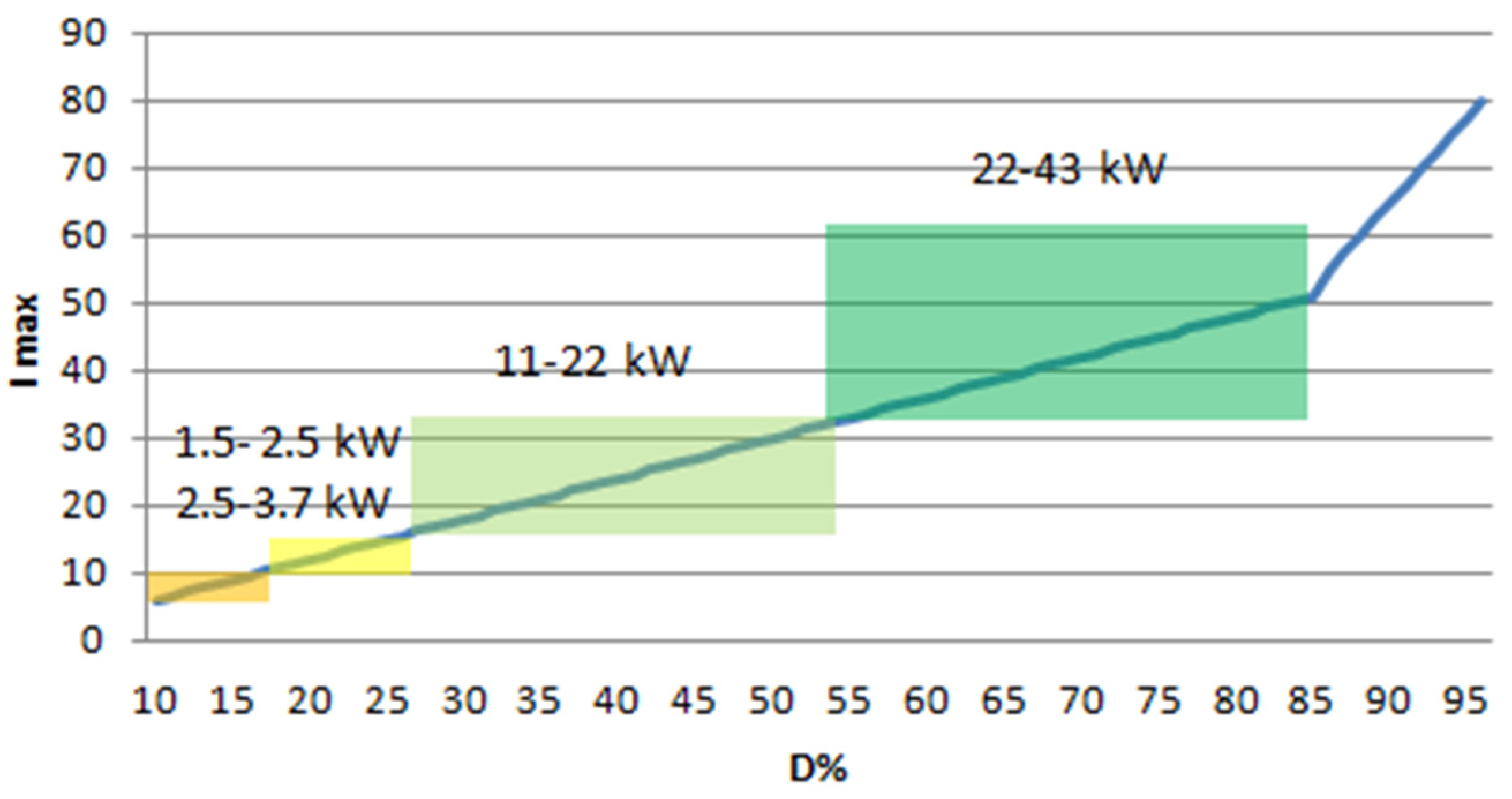
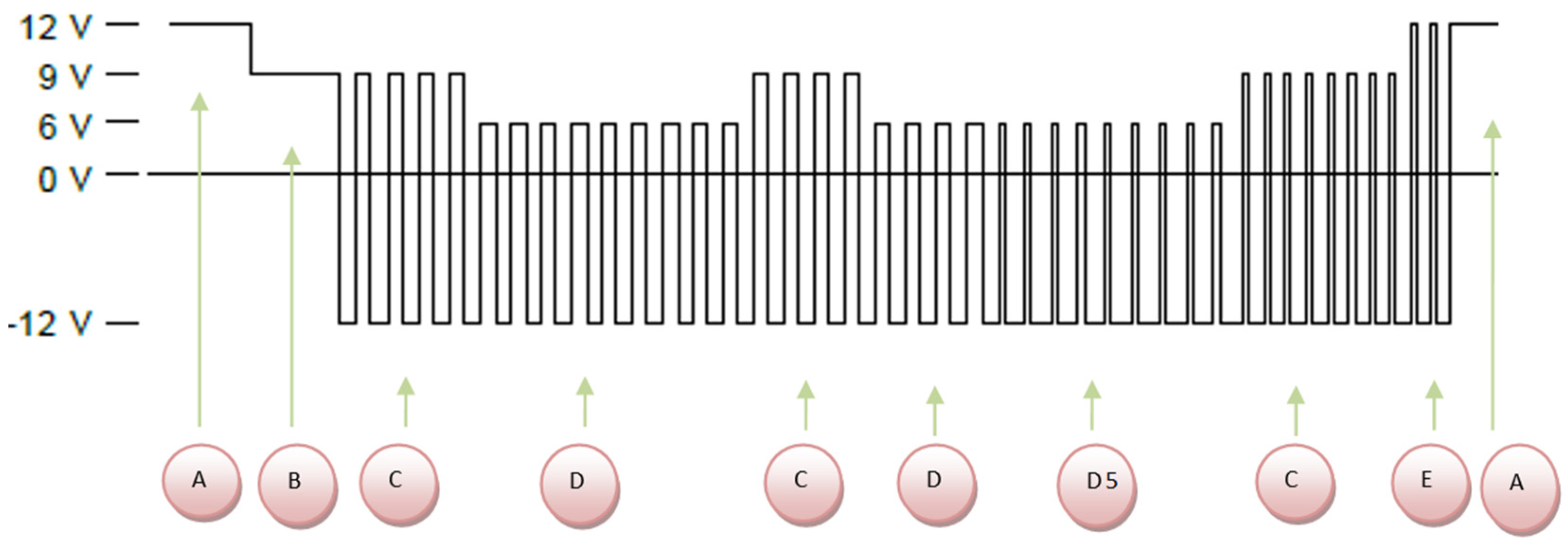
Charging Power Modulation
- Verification of the continuity of the ground conductor.
- Verification of the connected vehicle.
- Enabling and disabling energy transfer.
- Verification of the maximum supply current that can be drawn.
3. Results
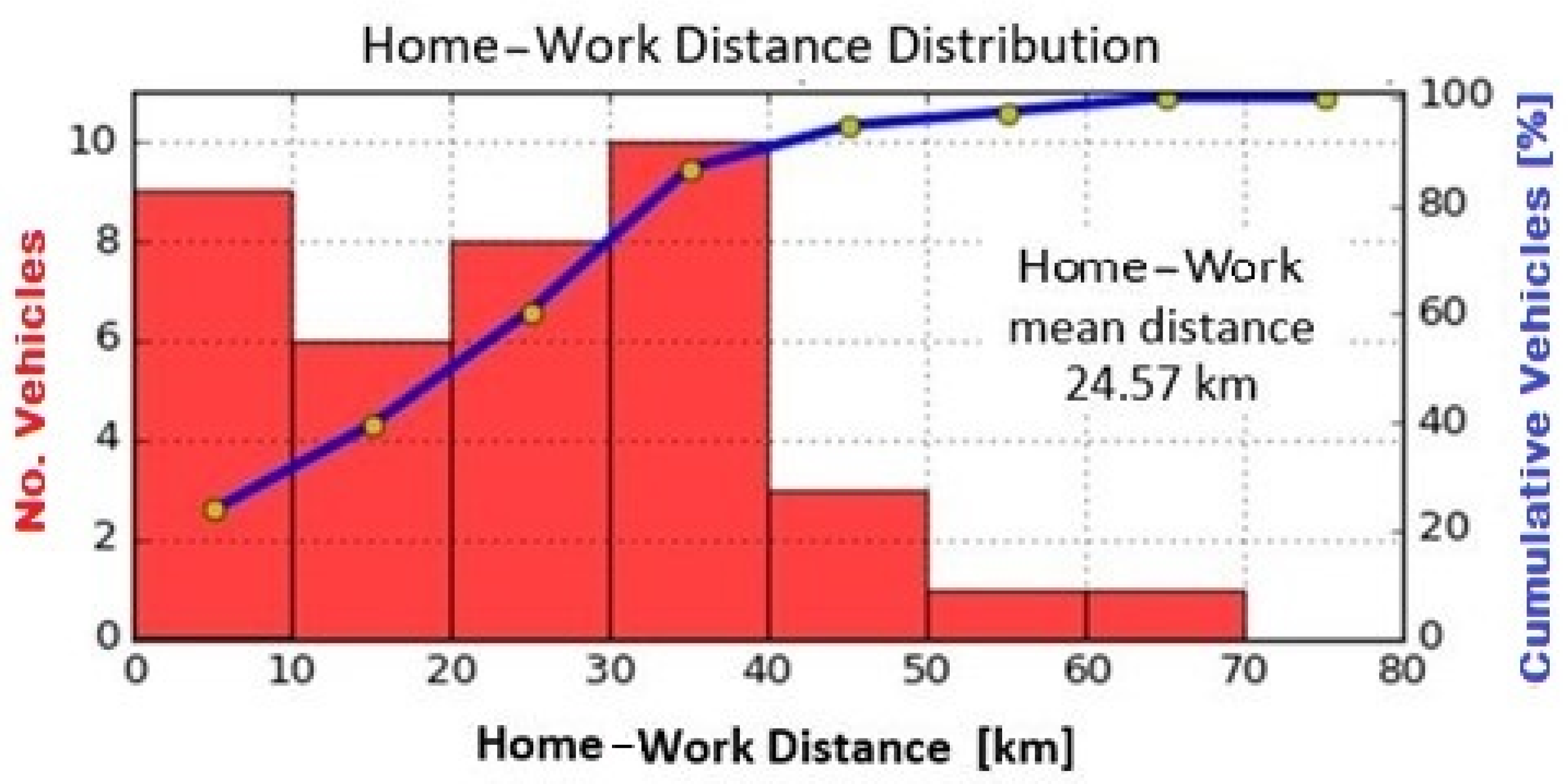
3.1. Data Analysis
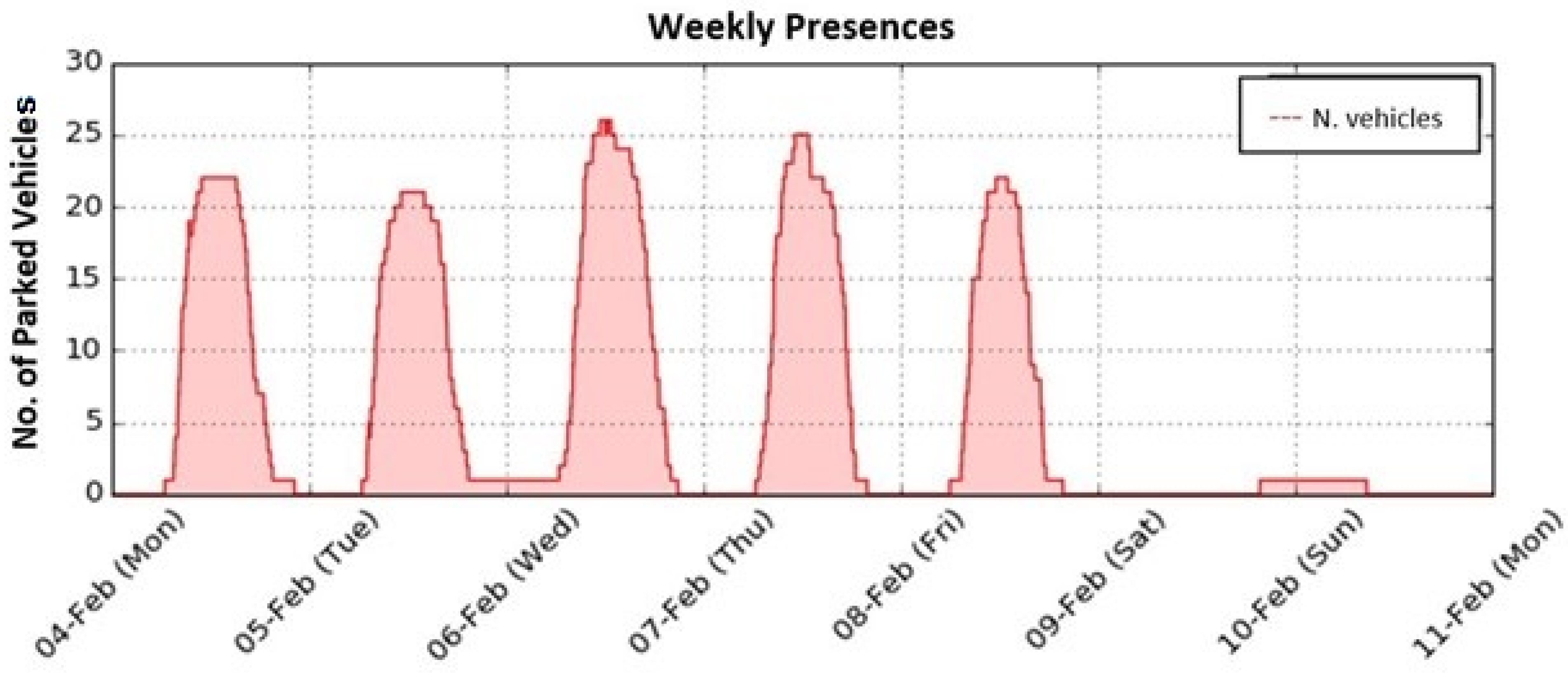
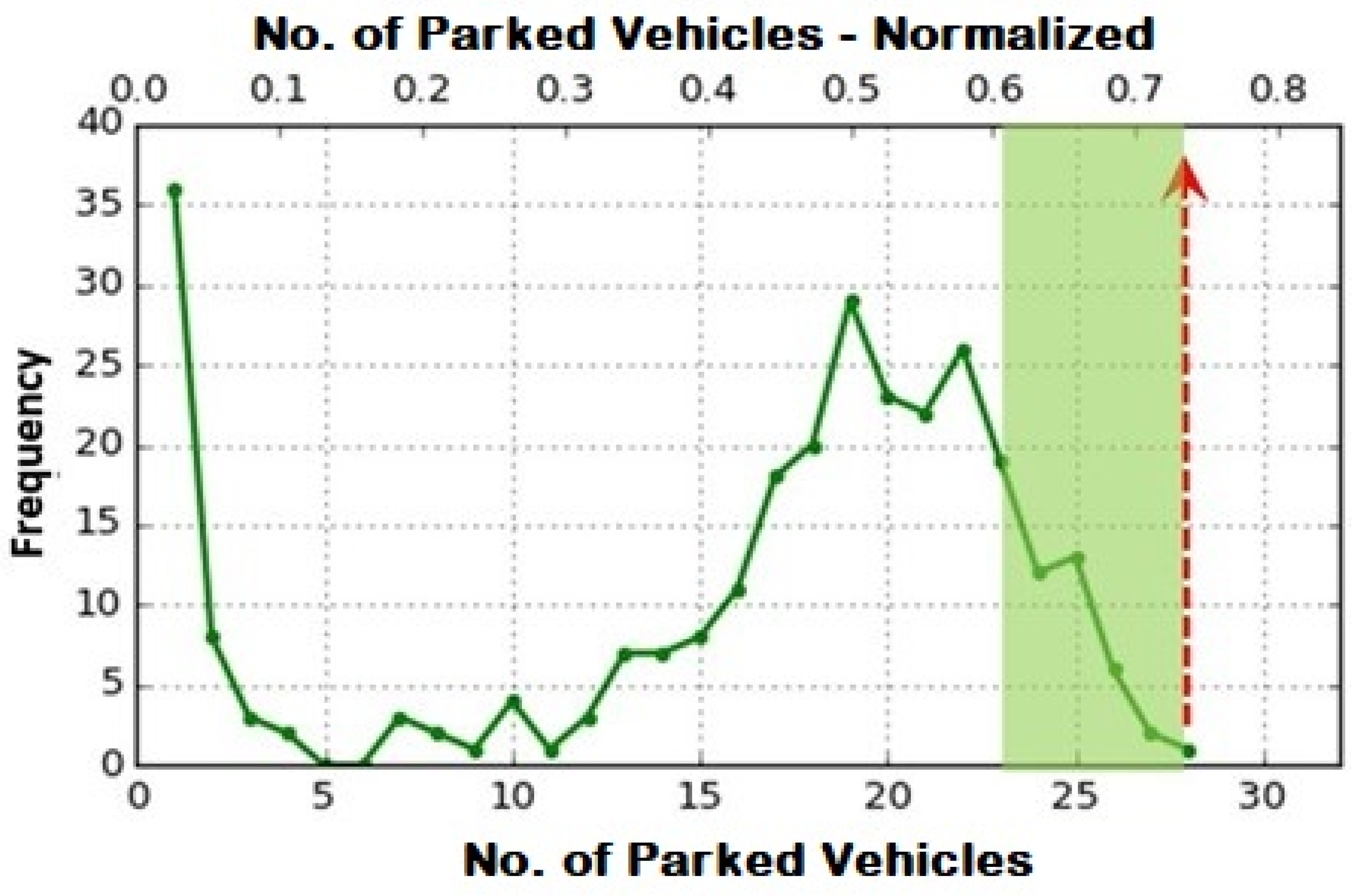
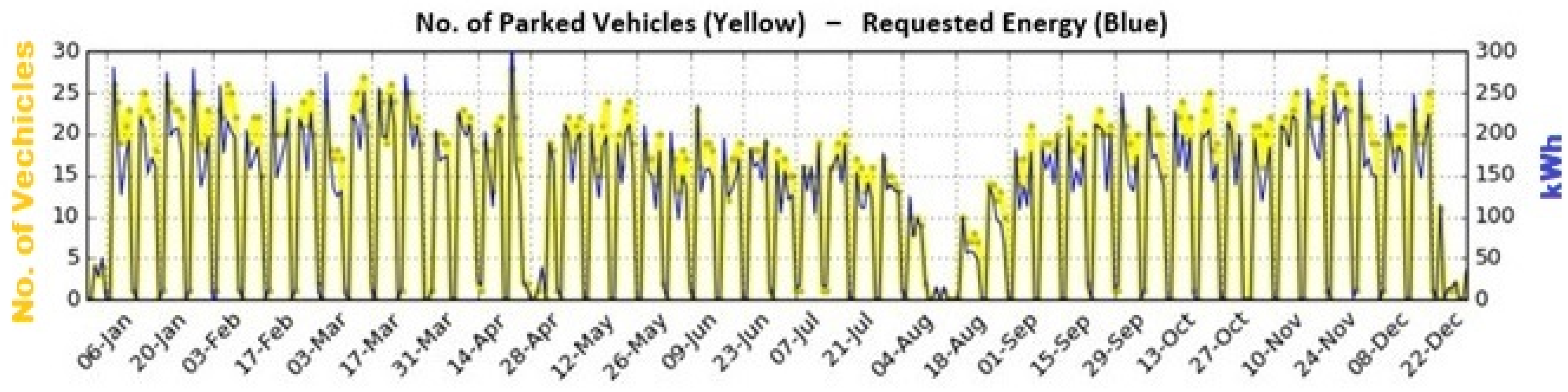
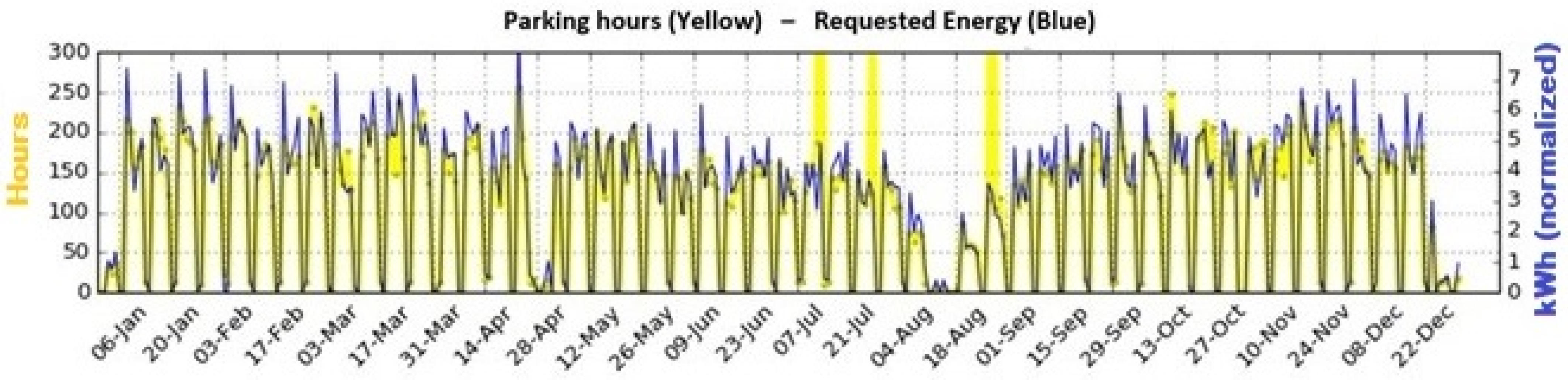
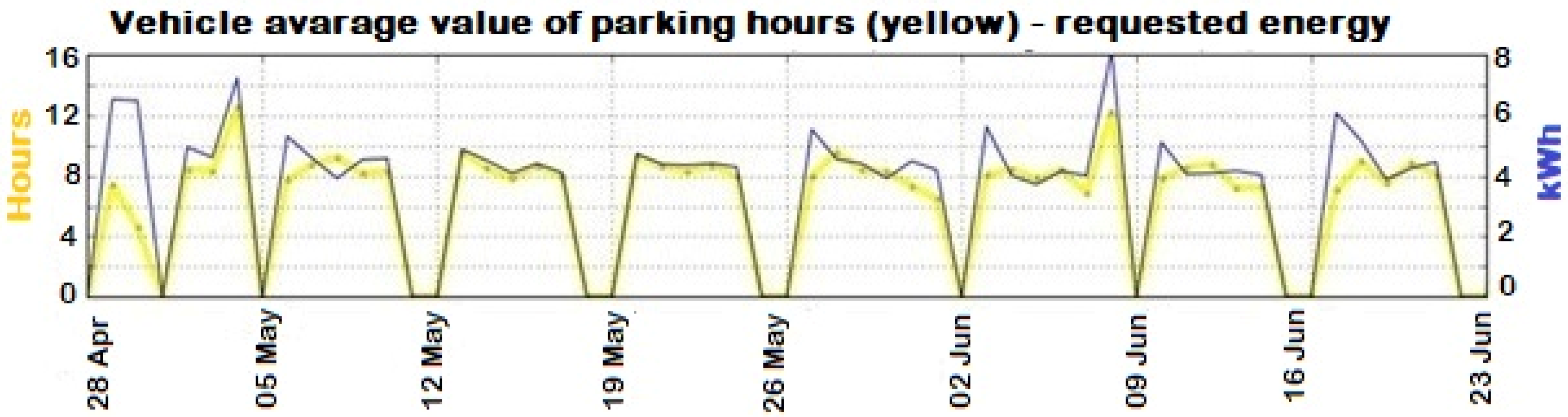
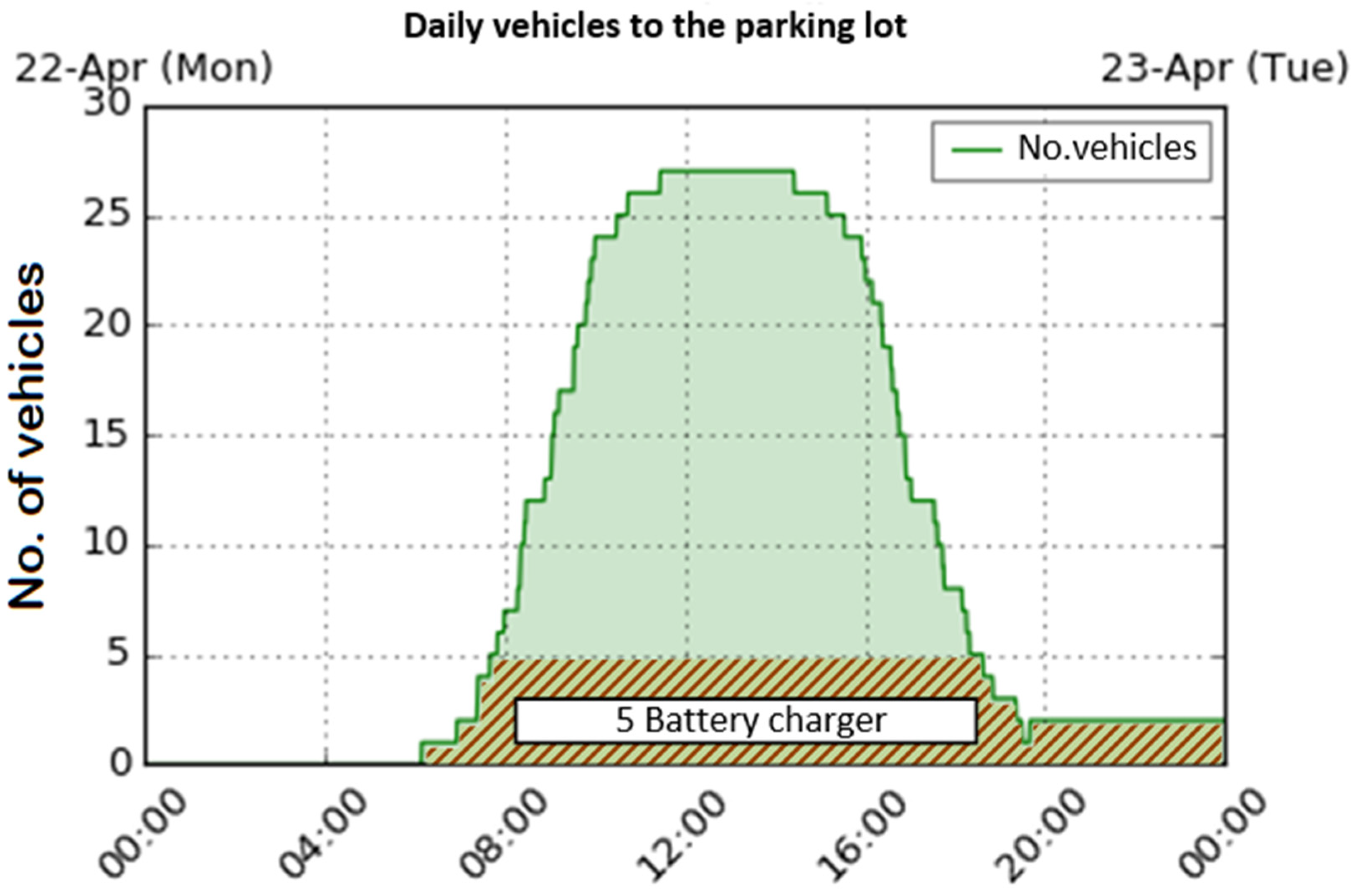
3.1.1. Temporal Distribution of the Stop Events
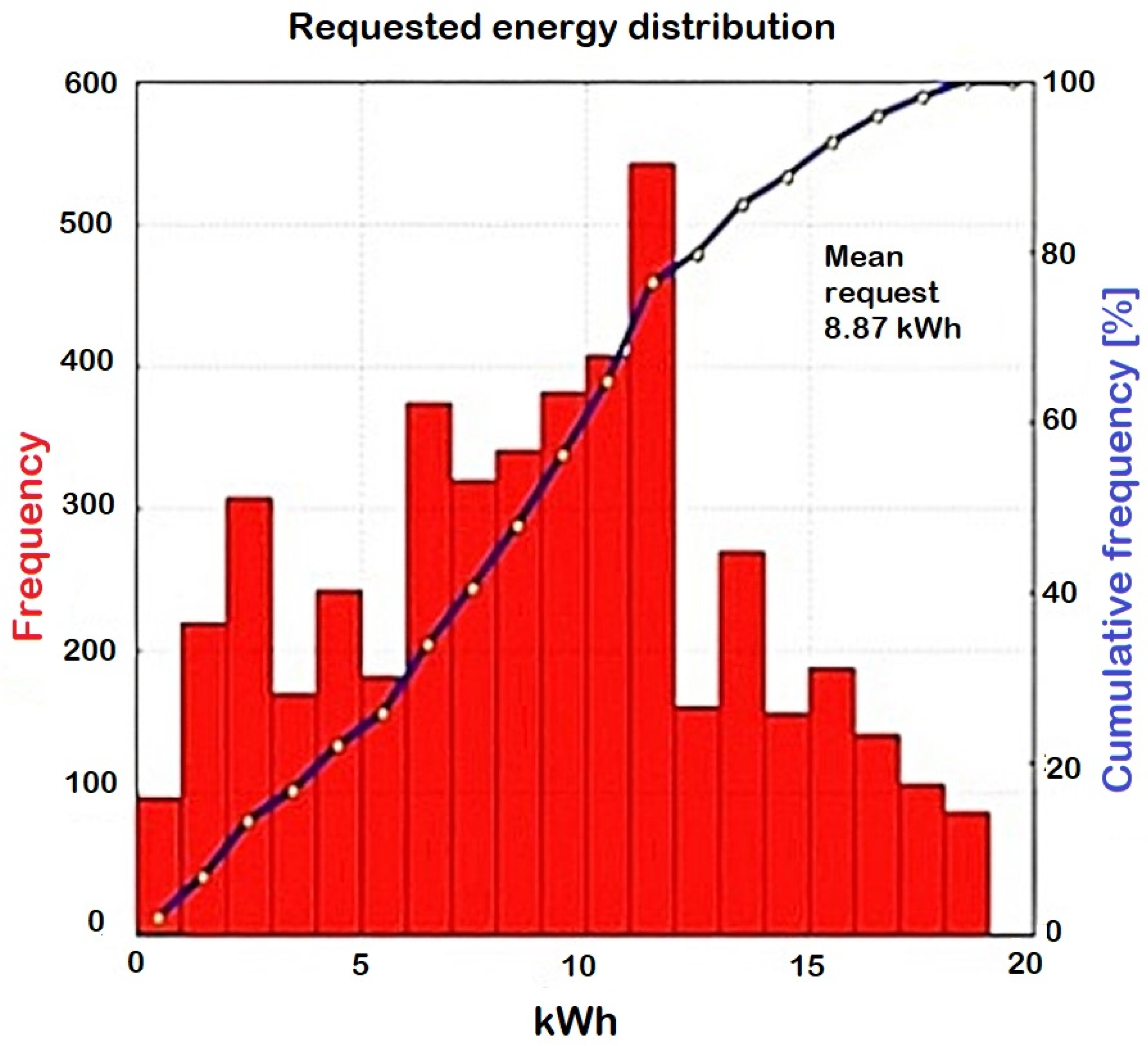
3.1.2. Charge Demand
- Charging is preferably done at the workplace.
- Charging at home or any other location occurs only when strictly necessary.
3.2. Charge Management Strategies
- N° CP ≥ N° EV
- N° CP < N° EV
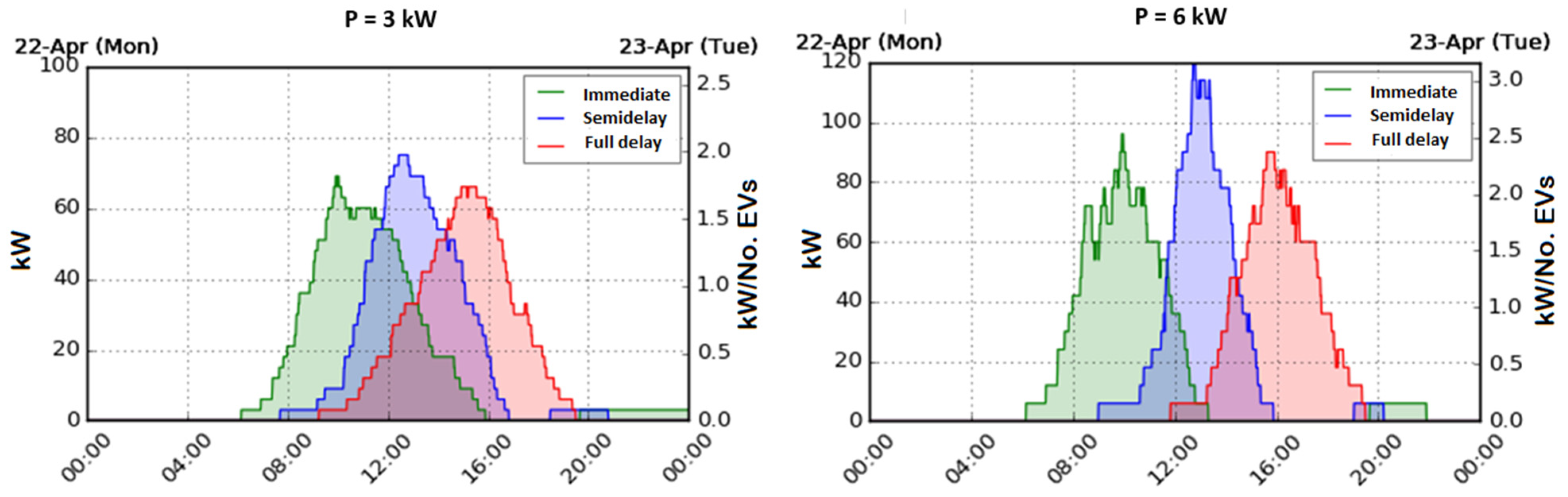
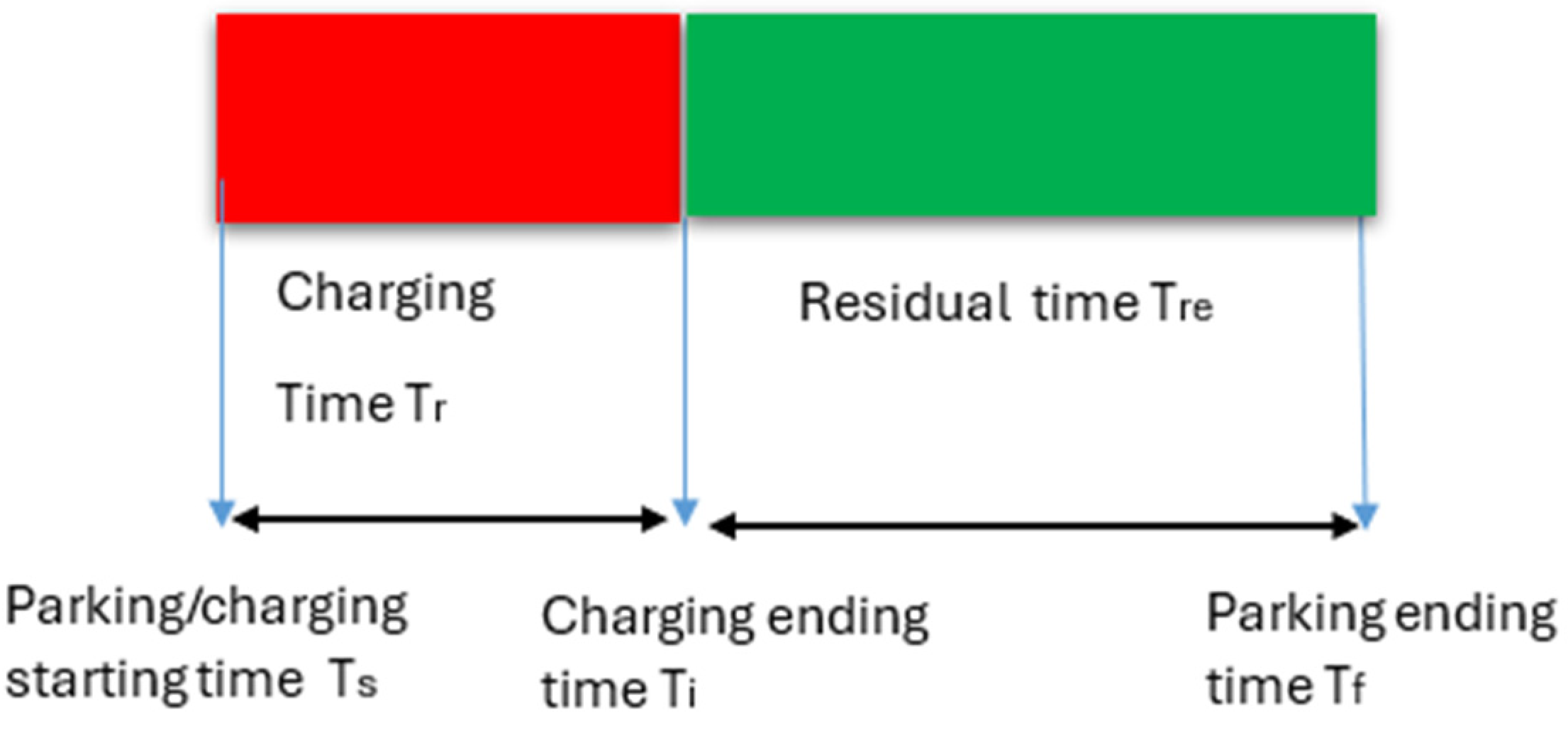
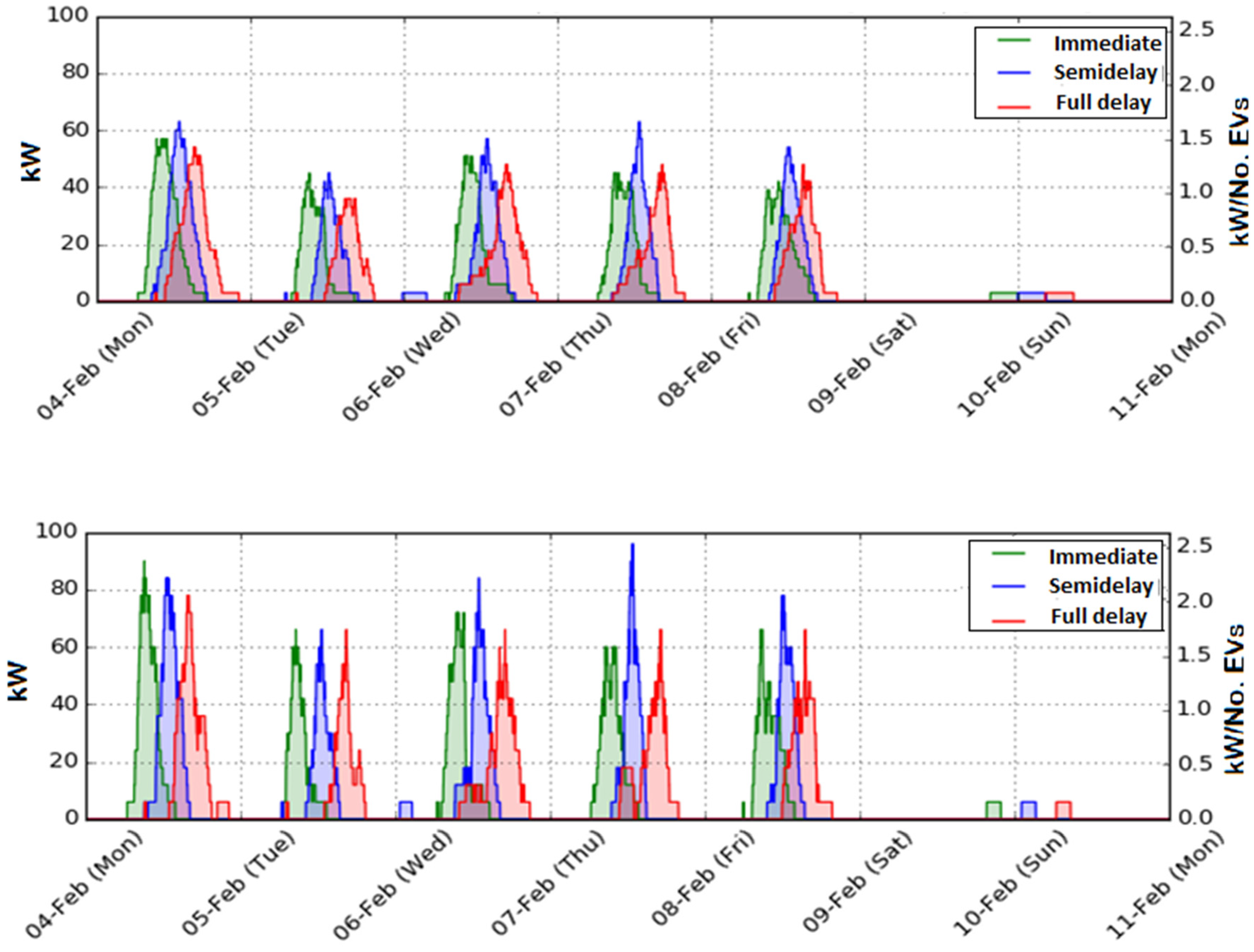
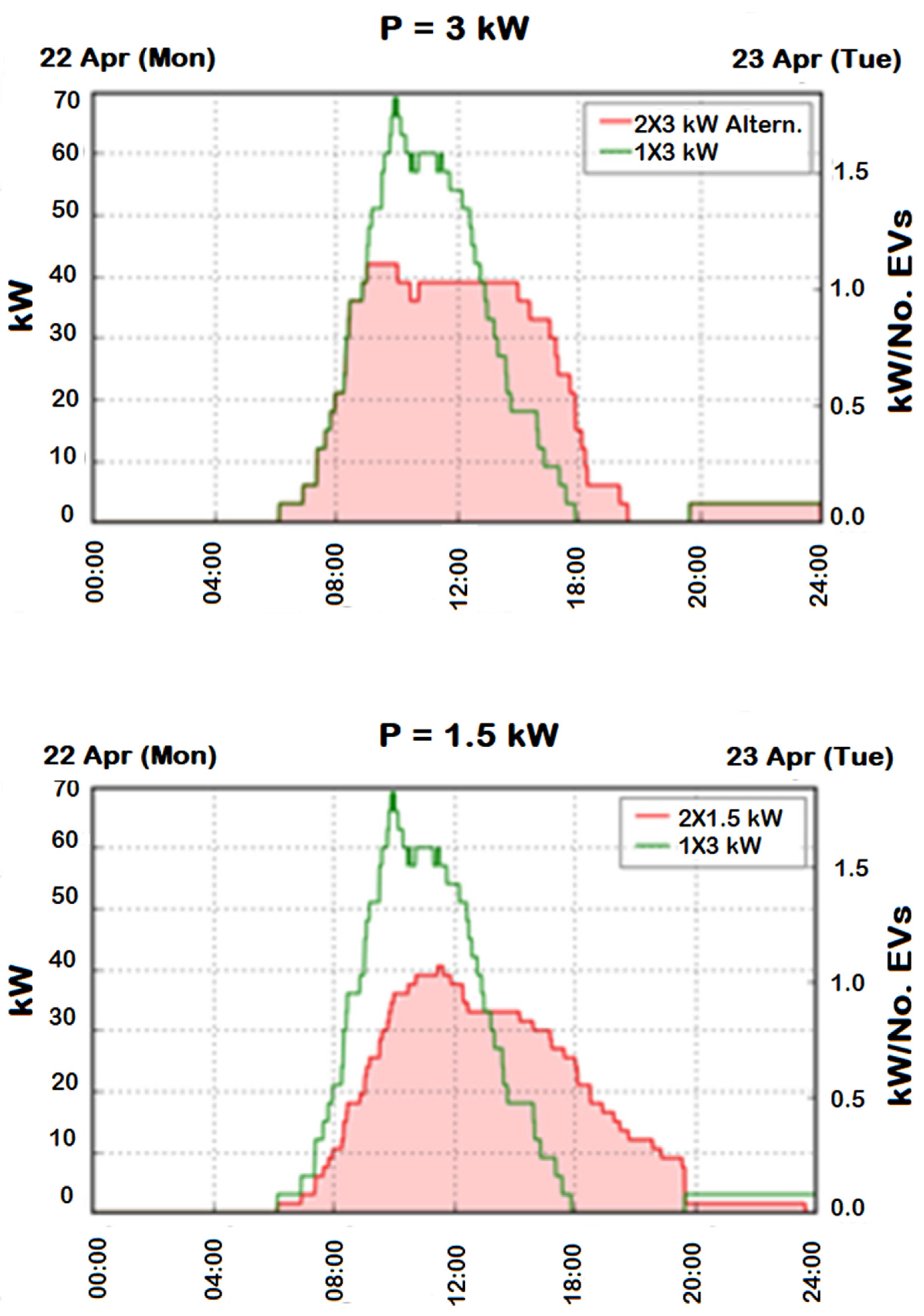
3.2.1. Surplus of CPs
- (a)
- The vehicle waits for a time equal to half of its residual time.
- (b)
- The vehicle waits for a time equal to its full residual time.
- (a)
- All the engaged CPs are powered, but with a power equal to half the nominal power of the CP.
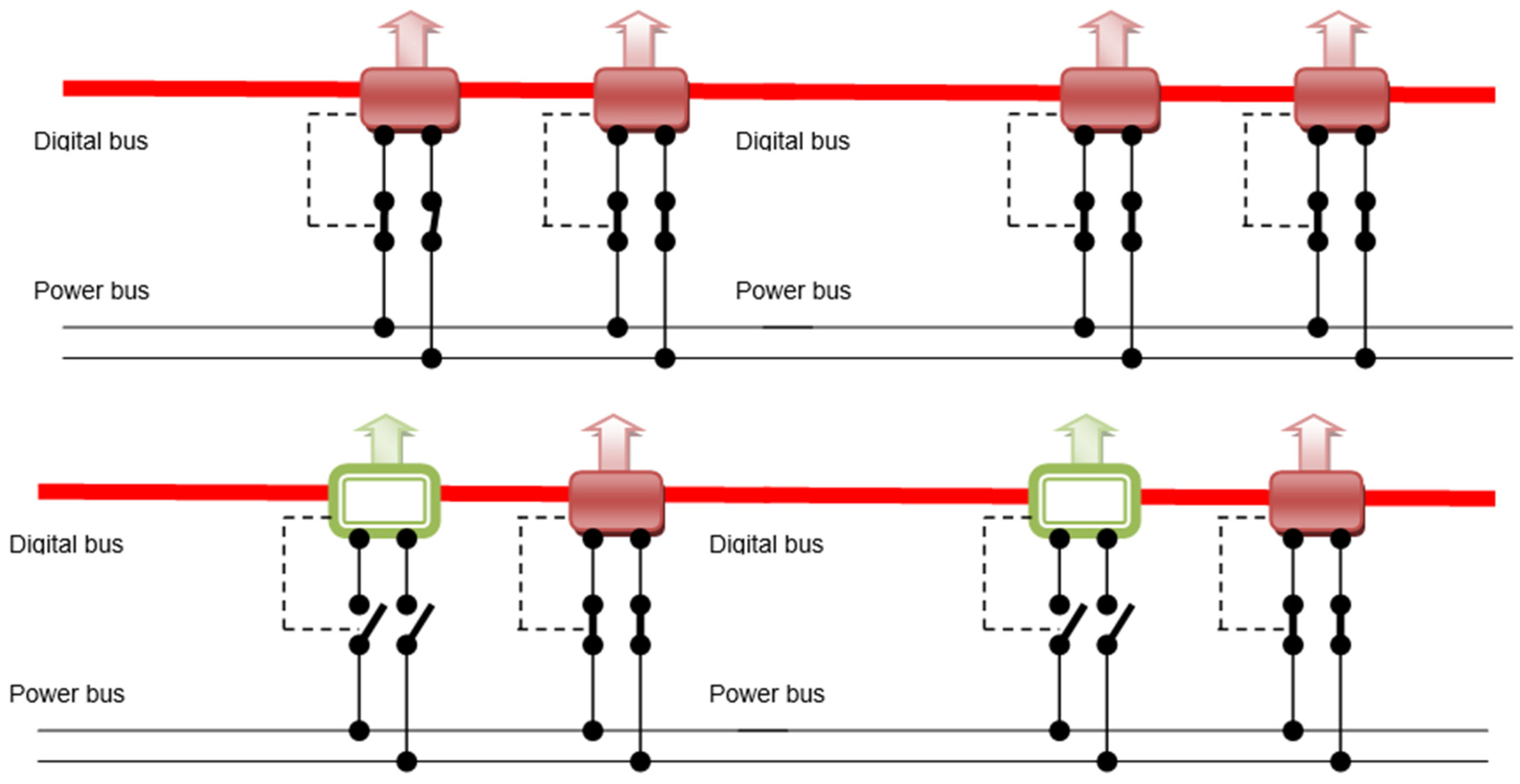
- (b)
- The CPs are grouped in groups of two and are powered alternately at the nominal power of the CP.
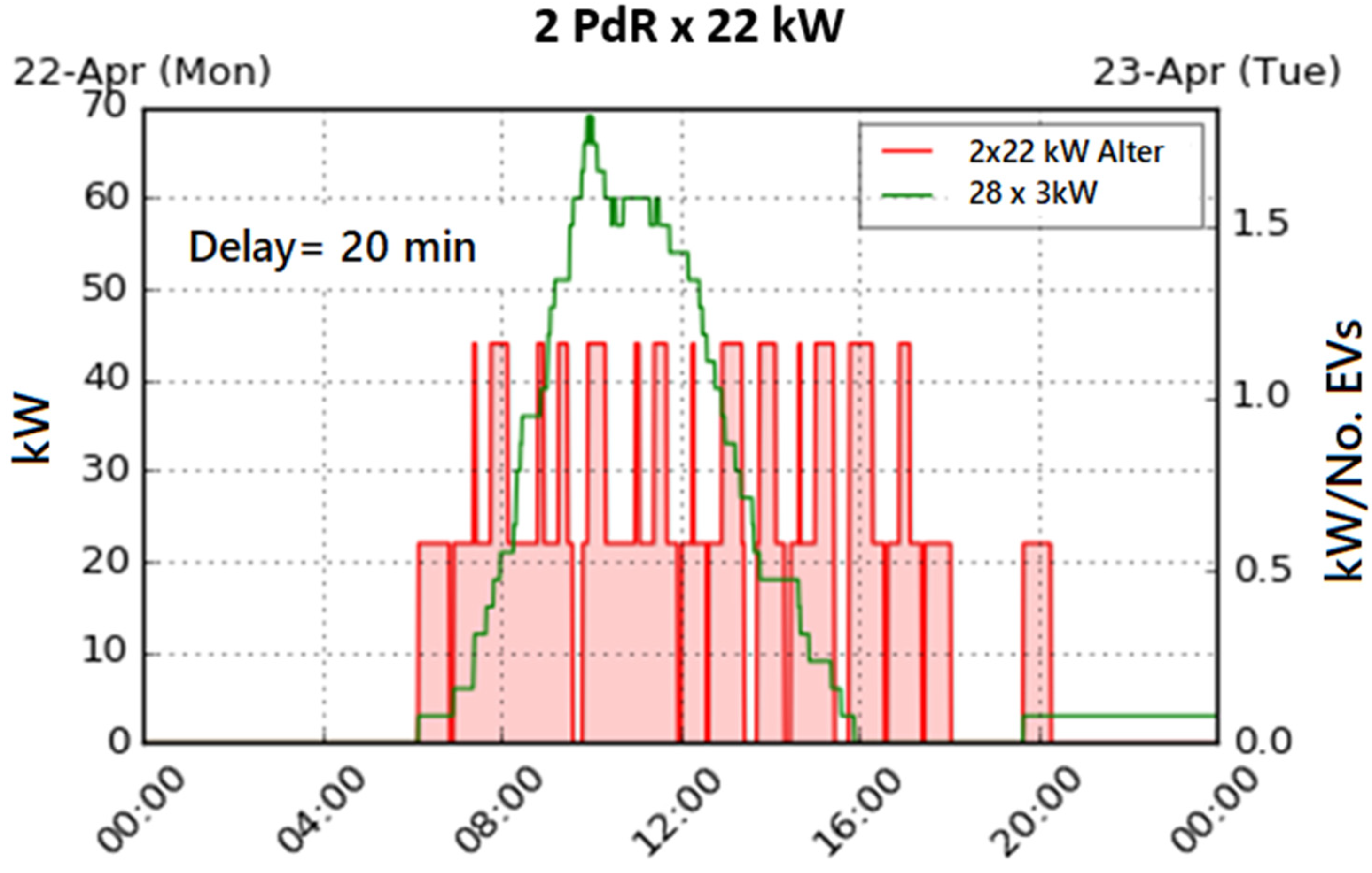
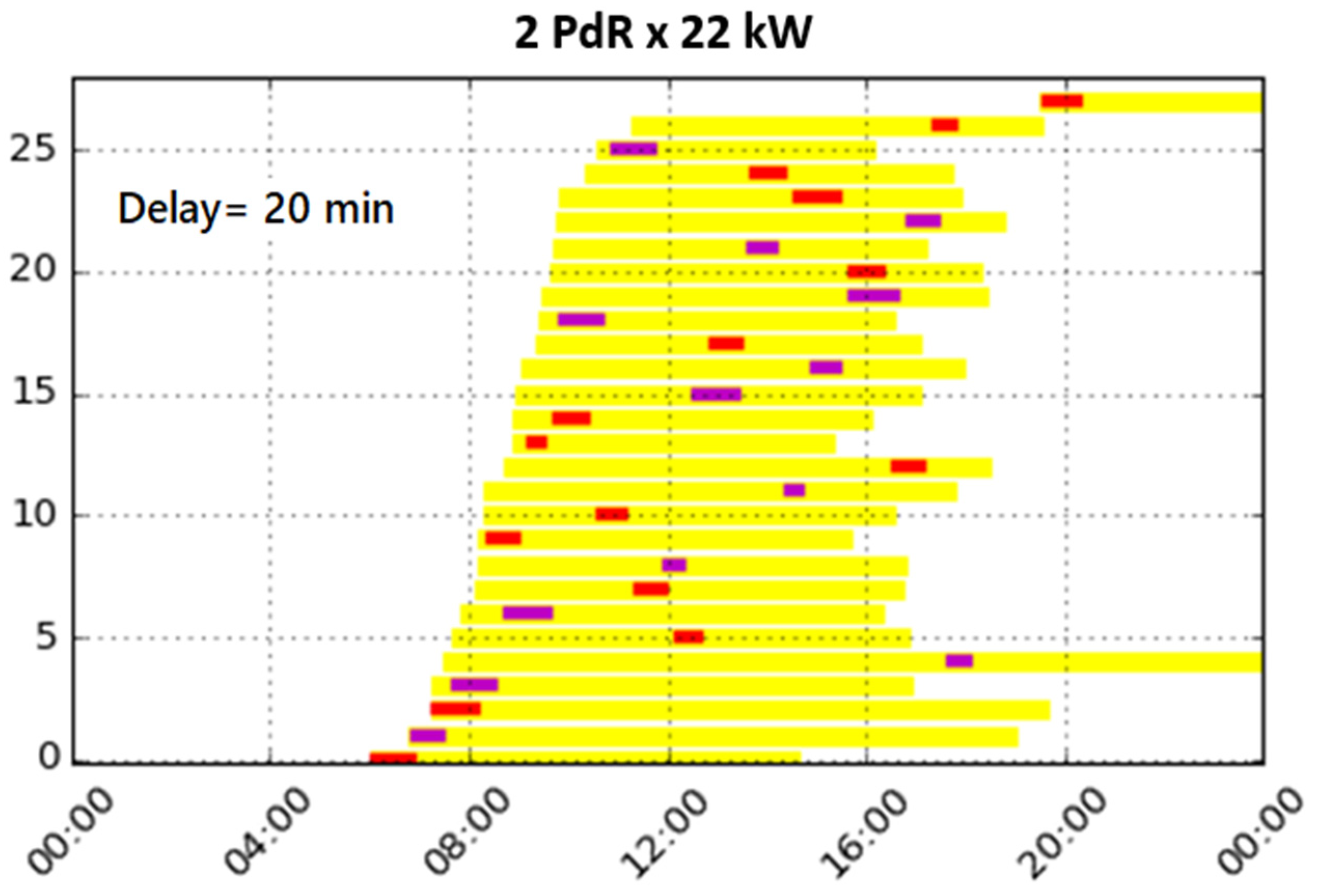
3.2.2. Limited Number of CPs
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Electric Vehicle Battery Prices Are Expected to Fall Almost 50% by 2026, Goldman Sachs, October 7, 2024. Available online: https://www.goldmansachs.com/insights/articles/electric-vehicle-battery-prices-are-expected-to-fall-almost-50-percent-by-2025 (accessed on 11 November 2024).
- Shah, R.; Mittal, V.; Precilla, A.M. Challenges and Advancements in All-Solid-State Battery Technology for Electric Vehicles. J 2024, 7, 204–217. [Google Scholar] [CrossRef]
- IEA; Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Rainieri, G.; Buizza, C.; Ghilardi, A. The psychological, human factors and socio-technical contribution: A systematic review towards range anxiety of battery electric vehicles’ drivers. Transp. Res. Part F: Traffic Psychol. Behav. 2023, 99, 52–70. [Google Scholar] [CrossRef]
- Brey, B.d.; Gardien, L.; Hiep, E. Smart Charging Needs, Wants and Demands, Charging Experiences and Opinions of EV Drivers. World Electr. Veh. J. 2021, 12, 168. [Google Scholar] [CrossRef]
- Amann, G.; Escobedo Bermúdez, V.R.; Boskov-Kovacs, E.; Gallego Amores, S.; Giannelos, S.; Iliceto, A.; Ilo, A.; Chavarro, J.R.; Samovich, N.; Schmitt, L.; et al. E-Mobility Deployment and Impact on Grids: Impact of EV and Charging Infrastructure on European T&D Grids: Innovation Needs; Gallego Amores, S., Ed.; Publications Office of the European Union: Luxembourg, 2022; MJ-09-22-246-EN-N. [Google Scholar] [CrossRef]
- Hildermeier, J.; Kolokathis, C.; Rosenow, J.; Hogan, M.; Wiese, C.; Jahn, A. Smart EV Charging: A Global Review of Promising Practices. World Electr. Veh. J. 2019, 10, 80. [Google Scholar] [CrossRef]
- Rahman, I.; Vasant, P.M.; Singh, B.S.M.; Abdullah-Al-Wadud, M.; Adnan, N. Review of recent trends in optimization techniques for plug-in hybrid, and electric vehicle charging infrastructures. Renew. Sustain. Energy Rev. 2016, 58, 039–1047. [Google Scholar] [CrossRef]
- Ayoade, I.A.; Longe, O.M. A Comprehensive Review on Smart Electromobility Charging Infrastructure. World Electr. Veh. J. 2024, 15, 286. [Google Scholar] [CrossRef]
- Zahler, J.; Vollmuth, P.; Ostermann, A. Unlocking the Potential: An In-Depth Analysis of Factors Shaping the Success of Smart and Bidirectional Charging in a Cross-Country Comparison. Energies 2024, 17, 3637. [Google Scholar] [CrossRef]
- Amin, A.; Tareen, W.U.K.; Usman, M.; Ali, H.; Bari, I.; Horan, B.; Mekhilef, S.; Asif, M.; Ahmed, S.; Mahmood, A. A Review of Optimal Charging Strategy for Electric Vehicles under Dynamic Pricing Schemes in the Distribution Charging Network. Sustainability 2020, 12, 10160. [Google Scholar] [CrossRef]
- Aghajan-Eshkevari, S.; Azad, S.; Nazari-Heris, M.; Ameli, M.T.; Asadi, S. Charging and Discharging of Electric Vehicles in Power Systems: An Updated and Detailed Review of Methods, Control Structures, Objectives, and Optimization Methodologies. Sustainability 2022, 14, 2137. [Google Scholar] [CrossRef]
- Rauf, M.; Kumar, L.; Zulkifli, S.A.; Jamil, A. Aspects of artificial intelligence in future electric vehicle technology for sustainable environmental impact. Environ. Chall. 2024, 14, 100854. [Google Scholar] [CrossRef]
- Irfan, M.; Deilami, S.; Huang, S.; Veettil, B.P. Rooftop Solar and Electric Vehicle Integration for Smart, Sustainable Homes: A Comprehensive Review. Energies 2023, 16, 7248. [Google Scholar] [CrossRef]
- Muqeet, H.A.; Liaqat, R.; Jamil, M.; Khan, A.A. A State-of-the-Art Review of Smart Energy Systems and Their Management in a Smart Grid Environment. Energies 2023, 16, 472. [Google Scholar] [CrossRef]
- Ramsebner, J.; Hiesl, A.; Haas, R.; Auer, H.; Ajanovic, A.; Mayrhofer, G.; Reinhardt, A.; Wimmer, A.; Ferchhumer, E.; Mitterndorfer, B.; et al. Smart charging infrastructure for battery electric vehicles in multi apartment buildings. Smart Energy 2023, 9, 100093. [Google Scholar] [CrossRef]
- Bjørndal, E.; Bjørndal, M.; Bøe, E.K.; Dalton, J.; Guajardo, M. Smart home charging of electric vehicles using a digital platform. Smart Energy 2023, 12, 100118. [Google Scholar] [CrossRef]
- Li, A.; Chen, Y.; Xiang, X.; Xu, C.; Wan, M.; Huo, Y.; Geng, G. Orderly Charging Control of Electric Vehicles: A Smart Meter-Based Approach. World Electr. Veh. J. 2024, 15, 449. [Google Scholar] [CrossRef]
- Makeen, P.; Memon, S.; Elkasrawy, M.A.; Abdullatif, S.O.; Ghali, H.A. Smart green charging scheme of centralized electric vehicle stations. Int. J. Green Energy 2021, 19, 490–498. [Google Scholar] [CrossRef]
- Vaidya, B.; Mouftah, H.T. Smart electric vehicle charging management for smart cities. IET Smart Cities 2020, 2, 4–13. [Google Scholar] [CrossRef]
- Gowri, V.; Sivraj, P. A Centralized Management System Software Framework to aid in EV Charging. In Proceedings of the 2021 International Conference on Recent Trends on Electronics, Information, Communication & Technology (RTEICT), Bangalore, India, 27–28 August 2021; pp. 703–707. [Google Scholar] [CrossRef]
- Aygun, I.; Kamalasadan, S. Centralized Charging Approach to Manage Electric Vehicle Fleets For Balanced Grid. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), Trivandrum, India, 2–5 January 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Dahiwale, P.V.; Rather, Z.H. Centralized Multi-objective Framework for Smart EV Charging in Distribution System. In Proceedings of the 2023 IEEE PES Conference on Innovative Smart Grid Technologies—Middle East (ISGT Middle East), Abu Dhabi, United Arab Emirates, 12–15 March 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Yi, Z.; Scoffield, D.; Smart, J.; Meintz, A.; Jun, M.; Mohanpurkar, M.; Medam, A. A highly efficient control framework for centralized residential charging coordination of large electric vehicle populations. Int. J. Electr. Power Energy Syst. 2020, 117, 105661. [Google Scholar] [CrossRef]
- Fernandez, V.; Pérez, V. Optimization of Electric Vehicle Charging Control in a Demand-Side Management Context: A Model Predictive Control Approach. Appl. Sci. 2024, 14, 8736. [Google Scholar] [CrossRef]
- Korkas, C.D.; Tsaknakis, C.D.; Kapoutsis, A.C.; Kosmatopoulos, E. Distributed and Multi-Agent Reinforcement Learning Framework for Optimal Electric Vehicle Charging Scheduling. Energies 2024, 17, 3694. [Google Scholar] [CrossRef]
- Aoun, A.; Adda, M.; Ilinca, A.; Ghandour, M.; Ibrahim, H. Dynamic Charging Optimization Algorithm for Electric Vehicles to Mitigate Grid Power Peaks. World Electr. Veh. J. 2024, 15, 324. [Google Scholar] [CrossRef]
- Alyami, S. Ensuring Sustainable Grid Stability through Effective EV Charging Management: A Time and Energy-Based Approach. Sustainability 2024, 16, 6149. [Google Scholar] [CrossRef]
- Shern, S.J.; Sarker, M.T.; Ramasamy, G.; Thiagarajah, S.P.; Al Farid, F.; Suganthi, S.T. Artificial Intelligence-Based Electric Vehicle Smart Charging System in Malaysia. World Electr. Veh. J. 2024, 15, 440. [Google Scholar] [CrossRef]
- Singh, P.; Kumar, Y.; Sawle, Y.; Alotaibi, M.A.; Malik, H.; Márquez, F.P.G. Development of artificial Intelligence-Based adaptive vehicle to grid and grid to vehicle controller for electric vehicle charging station. Ain Shams Eng. J. 2024, 15, 102937. [Google Scholar] [CrossRef]
- Bose, P.; Sivraj, P. Smart Charging Infrastructure for Electric Vehicles in a Charging Station. In Proceedings of the 2020 4th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 13–15 May 2020; pp. 186–192. [Google Scholar] [CrossRef]
- Stojkovic, J. Multi-Objective Optimal Charging Control of Electric Vehicles in PV charging station. In Proceedings of the 2019 16th International Conference on the European Energy Market (EEM), Ljubljana, Slovenia, 18–20 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Santos, J.B.; Francisco, A.M.B.; Cabrita, C.; Monteiro, J.; Pacheco, A.; Cardoso, P.J.S. Development and Implementation of a Smart Charging System for Electric Vehicles Based on the ISO 15118 Standard. Energies 2024, 17, 3045. [Google Scholar] [CrossRef]
- Maia, G.L., Jr.; Santos, C.C.L.; Nunes, P.R.M.; Castro, J.F.C.; Marques, D.C.; Medeiros, L.H.A.D.; Limongi, L.R.; Brito, M.E.C.; Dantas, N.K.L.; Filho, A.V.M.L.; et al. EV Smart-Charging Strategy for Power Management in Distribution Grid with High Penetration of Distributed Generation. Energies 2024, 17, 5394. [Google Scholar] [CrossRef]
- Meteab, W.K.; Alsultani, S.A.H.; Jurado, F. Energy Management of Microgrids with a Smart Charging Strategy for Electric Vehicles Using an Improved RUN Optimizer. Energies 2023, 16, 6038. [Google Scholar] [CrossRef]
- Fathy, A. Bald eagle search optimizer-based energy management strategy for microgrid with renewable sources and electric vehicles. Appl. Energy 2023, 334, 120688. [Google Scholar] [CrossRef]
- Chakraborty, A.; Ray, S. Multi-objective energy management using a smart charging technique of a microgrid with the charging impact of plug-in hybrid electric vehicles. Sustain. Cities Soc. 2024, 117, 105923. [Google Scholar] [CrossRef]
- Muniandi, B.; Wan, S.; El-Yabroudi, M. Bi-Directional Charging with V2L Integration for Optimal Energy Management in Electric Vehicles. Electronics 2024, 13, 4221. [Google Scholar] [CrossRef]
- Al-Obaidi, H. Khani, H.E.Z. Farag, M. Mohamed, Bidirectional smart charging of electric vehicles considering user preferences, peer to peer energy trade, and provision of grid ancillary services. Int. J. Electr. Power Energy Syst. 2021, 124, 106353. [Google Scholar] [CrossRef]
- Chen, H.; Hu, Z.; Luo, H.; Qin, J.; Rajagopal, R.; Zhang, H. Design and Planning of a Multiple-Charger Multiple-Port Charging System for PEV Charging Station. IEEE Trans. Smart Grid 2019, 10, 173–183. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, Z.; Xu, Z.; Song, Y. Optimal Planning of PEV Charging Station With Single Output Multiple Cables Charging Spots. IEEE Trans. Smart Grid 2017, 8, 2119–2128. [Google Scholar] [CrossRef]
- Morais, H. New approach for electric vehicles charging management in parking lots considering fairness rules. Electr. Power Syst. Res. 2023, 217, 109107. [Google Scholar] [CrossRef]
- Andrenacci, N.; Ragona, R.; Valenti, G. A demand-side approach to the optimal deployment of electric vehicle charging stations in metropolitan areas. Appl. Energy 2016, 182, 39–46. [Google Scholar] [CrossRef]
- “L’Unrae Presenta il Quadro del Settore Automotive nel 2023”, (Online), 2023. (In Italian). Available online: https://www.sistan.it/index.php?id=88&no_cache=1&tx_ttnews%5Btt_news%5D=11356 (accessed on 30 November 2024).
- Will, A. Schuller, Understanding user acceptance factors of electric vehicle smart charging. Transp. Res. Part C: Emerg. Technol. 2016, 71, 198–214. [Google Scholar] [CrossRef]
- Gupta, V.; Kumar, R.; Panigrahi, B.K. User-Willingness-Based Decentralized EV Charging Management in Multiaggregator Scheduling. IEEE Trans. Ind. Appl. 2020, 56, 5704–5715. [Google Scholar] [CrossRef]
- Alsabbagh, A.; Wu, B.; Ma, C. Distributed Electric Vehicles Charging Management Considering Time Anxiety and Customer Behaviors. IEEE Trans. Ind. Inform. 2021, 17, 2422–2431. [Google Scholar] [CrossRef]
- Lee, J.H.; Chakraborty, D.; Hardman, S.J.; Tal, G. Exploring electric vehicle charging patterns: Mixed usage of charging infrastructure. Transp. Res. Part D Transp. Environ. 2020, 79, 102249. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Review Focus |
|---|---|
| [5] | Analysis of a survey on the experiences and opinions of EV drivers about smart charging. |
| [6] | Position paper on technical and connectivity solutions for electric vehicle (EV) charging and regulations. |
| [7] | Qualitative review of policies for smart EV grid integration. |
| [8] | Review on optimization problems and computational strategies for EV charging. |
| [9] | Review on smart charging protocols and their impact on power distribution systems. |
| [10] | Comparison of smart charging use cases in different countries to provide guidance for transnational product development. |
| [11] | Review on optimal charging and scheduling strategies under dynamic pricing strategies. |
| [12] | Review of control structures at charging stations and optimization methods for charge and discharge management. |
| [13] | Review on charging technologies and applications of AI in the development of EVs. |
| [14] | Review on grid-connected rooftop solar PV smart homes integrated with EVs and energy management systems in Australia. |
| [15] | Review on smart grid enabling technologies, prominent features, and challenges. |
| Reference | RES | V2G | Charging Location | Centralized/ Decentralized | Main Outcome |
|---|---|---|---|---|---|
| [16] | Residential | Centralized | Smart charge management lessens the impact of EVs on the distribution grid, especially during long parking times in residential areas. | ||
| [17] | Residential | Centralized | Comparison of economic and energy performance between users of smart charging and conventional charging. | ||
| [18] | Residential | Hybrid | A significant reduction in peak charging demand is validated through a numerical case study. | ||
| [19] | Charging stations | Centralized | Comparison of different optimization approaches for queueing and user demand management | ||
| [20] | Charging stations | Centralized | Smart EV charging management system with centralized CS reservation. | ||
| [21] | Charging stations | Centralized | Software implementation of a centralized management system to achieve flexible charging. | ||
| [22] | Fleet | Centrilized | Centralized and scalable charging management algorithm, considering both the network side and the user comfort. | ||
| [23] | Charging stations | Centralized | Charging control strategy through electricity price pricing to minimize the impact on the electricity distribution network. | ||
| [24] | Residential | Centralized | A receding horizon charging coordination framework to manage a large number of charge requests. | ||
| [25] | Charging stations | Centralized | Demand-side management system to to meet both grid requirements and user needs. | ||
| [26] | Charging stations | Decentralized | Single-charger optimization approach to cost minimization and user satisfaction. | ||
| [27] | Residential | Centralized | Algorithm managing the charging of connected EV by assigning each a priority index. | ||
| [28] | Residential | Centralized | Charge requests are prioritized based on available charging time and energy required. | ||
| [29] | Charging stations | Centralized | Integration of artificial intelligence (AI) into Malaysian smart electric vehicle charging systems. | ||
| [30] | ✓ | ✓ | Microgrid | Centralized | Artificial-Neural-Network-based power management control system. |
| [31] | ✓ | ✓ | Charging station | Decentralized | Fuzzy logic controller at the EV charging station based on power requirements, energy price, and solar energy. |
| [32] | ✓ | Charging station | Decentralized | Multi-objective optimization to minimize charging station operational and power losses. | |
| [33] | ✓ | Charging station | Decentralized | Development of a charge emulation system using the ISO 15118 communication protocol. | |
| [34] | ✓ | Charging station | Centralized | Implementation of the dynamic current-limiting algorithm using the IEC 61850 protocol. | |
| [35] | ✓ | Microgrid | Centralized | Runge Kutta optimizer for the energy management of MGs, with reduction of the operating cost. | |
| [36] | ✓ | Microgrid | Centralized | Bald-eagle optimization method to minimize total operating cost and mitigate environmental pollutant emission. | |
| [37] | ✓ | Microgrid | Centralized | Slime Mould Algorithm to operating cost and emissions; weighted sum, fuzzy decision maker, and Slime Mould for multi-objective optimization of MG and PEV. | |
| [38] | ✓ | ✓ | Microgrid | Decentralized | Coordination system between EVs, charging stations, and grid, using smart meters and communication networks. |
| [39] | ✓ | Charging station | Decentralized | Algorithm for bidirectional smart charging considering user preferences, Peer-to-Peer energy trade, and grid ancillary services. | |
| [40] | Parking lot | Centralized | Two-stage stochastic programming model to coordinate the charging of multi-port chargers with minimization of investment and operating costs. | ||
| [41] | Charging station | Centralized | Two-stage stochastic programming model is developed for planning a public parking lot charging station equipped with single output multiple cables charging spots. | ||
| [42] | Residential parking lot | Centralized | Mixed-integer linear programming optimization to improve fairness in the charging process considering different types of charging contracts. |
| I (A) | 1P (V) | 3P (V) | 1P (kW) | 3P (kW) |
|---|---|---|---|---|
| 6 | 220–240 | 1.3–1.4 | ||
| 10 | 220–240 | 2.2–2.4 | ||
| 16 | 220–240 | 3.5–3.8 | 10.5–11 | |
| 32 | 220–240 | 380–400 | 7–7.6 | 21–22 |
| 64 | 220–240 | 380–400 | 14–15.3 | 42–44 |
| Days/Year | No. of Vehicles | Cumulative Frequency [%] |
|---|---|---|
| 0–20 | 0 | 0.0 |
| 20–40 | 3 | 7.9 |
| 40–60 | 4 | 18.4 |
| 60–80 | 4 | 28.9 |
| 80–100 | 5 | 42.1 |
| 100–120 | 3 | 50.0 |
| 120–140 | 1 | 52.6 |
| 140–160 | 5 | 65.8 |
| 160–180 | 5 | 78.9 |
| 180–200 | 4 | 89.5 |
| 200–220 | 4 | 100.0 |
| Max Charging Power | 3 kW | 2.5 kW | 2 kW | |||||
|---|---|---|---|---|---|---|---|---|
| CP ID | EV ID | Energy Required. [kWh] | Approach (b) | Round-Robin | Approach (b) | Round-Robin | Approach (b) | Round-Robin |
| 0 | 0 | 15.6 | – | – | – | 2.1 | – | 4.8 |
| 14 | 11.2 | – | – | 2.3 | 0.2 | 7.2 | 2.4 | |
| 1 | 1 | 10.9 | – | – | – | – | 2.7 | – |
| 15 | 16.6 | – | – | – | 2.6 | 1.1 | 7.6 | |
| 2 | 2 | 16.8 | – | – | – | – | 2.3 | 1.6 |
| 16 | 9.7 | – | – | – | – | – | 0.7 | |
| 3 | 3 | 15.6 | – | – | – | 1.5 | – | 4.3 |
| 17 | 11.1 | – | – | 2.9 | 1.4 | 7.7 | 3.3 | |
| 4 | 4 | 7.0 | – | – | – | – | – | – |
| 18 | 16.0 | – | – | – | 1.2 | 2.3 | 5.6 | |
| 5 | 5 | 7.0 | – | – | – | – | – | – |
| 19 | 17.3 | – | – | – | – | 3.4 | 3.4 | |
| 6 | 6 | 17.4 | – | 3.0 | – | 5.4 | 1.0 | 7.8 |
| 20 | 11.6 | – | – | 3.6 | – | 7.6 | 0.9 | |
| 7 | 7 | 11.7 | – | – | – | – | – | 2.1 |
| 21 | 9.2 | – | – | – | – | 3.5 | 1.4 | |
| 8 | 8 | 6.0 | – | – | – | – | – | – |
| 22 | 11.1 | – | – | – | – | – | – | |
| 9 | 9 | 10.2 | – | – | – | – | – | 1.9 |
| 23 | 16.8 | – | – | 3.6 | 3.6 | 8.3 | 6.4 | |
| 10 | 10 | 9.3 | – | – | – | – | – | – |
| 24 | 12.6 | – | – | – | – | 3.7 | 3.7 | |
| 11 | 11 | 4.8 | – | – | – | – | – | – |
| 25 | 15.5 | – | – | 2.3 | 2.3 | 4.9 | 5.2 | |
| 12 | 12 | 10.8 | – | – | – | – | – | – |
| 26 | 5.7 | – | – | – | – | – | – | |
| 13 | 13 | 4.3 | – | – | – | – | – | – |
| 27 | 13.4 | – | – | – | – | – | 4.7 | |
| TOTAL | 325.2 | 0 | 3 | 14.7 | 20.3 | 55.7 | 63.1 | |
| 3 kW | 7 kW | 11 kW | 22 kW | |||||
|---|---|---|---|---|---|---|---|---|
| N° CB | kWh Deliv. | % Req. | kWh Deliv. | % Req. | kWh Deliv. | % Req. | kWh Deliv. | % Req. |
| 1 | 54 | 16 | 125 | 38 | 197 | 60 | 393 | 121 |
| 2 | 104 | 32 | 243 | 75 | 383 | 118 | ||
| 3 | 140 | 43 | 327 | 101 | ||||
| 4 | 175 | 54 | ||||||
| 5 | 208 | 64 | ||||||
| 6 | 239 | 73 | ||||||
| 7 | 270 | 83 | ||||||
| 8 | 300 | 92 | ||||||
| 9 | 328 | 101 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrenacci, N.; Genovese, A.; Giuli, G. Strategies for Workplace EV Charging Management. Energies 2025, 18, 421. https://doi.org/10.3390/en18020421
Andrenacci N, Genovese A, Giuli G. Strategies for Workplace EV Charging Management. Energies. 2025; 18(2):421. https://doi.org/10.3390/en18020421
Chicago/Turabian StyleAndrenacci, Natascia, Antonino Genovese, and Giancarlo Giuli. 2025. "Strategies for Workplace EV Charging Management" Energies 18, no. 2: 421. https://doi.org/10.3390/en18020421
APA StyleAndrenacci, N., Genovese, A., & Giuli, G. (2025). Strategies for Workplace EV Charging Management. Energies, 18(2), 421. https://doi.org/10.3390/en18020421