
Towards Digital Twin Modeling and Applications for Permanent Magnet Synchronous Motors



Abstract
:1. Introduction
2. Fundamentals of Digital Twin Technology
3. Modeling Techniques for Digital Twins in PMSMs
3.1. Physics-Based Models
3.2. Data-Driven Models
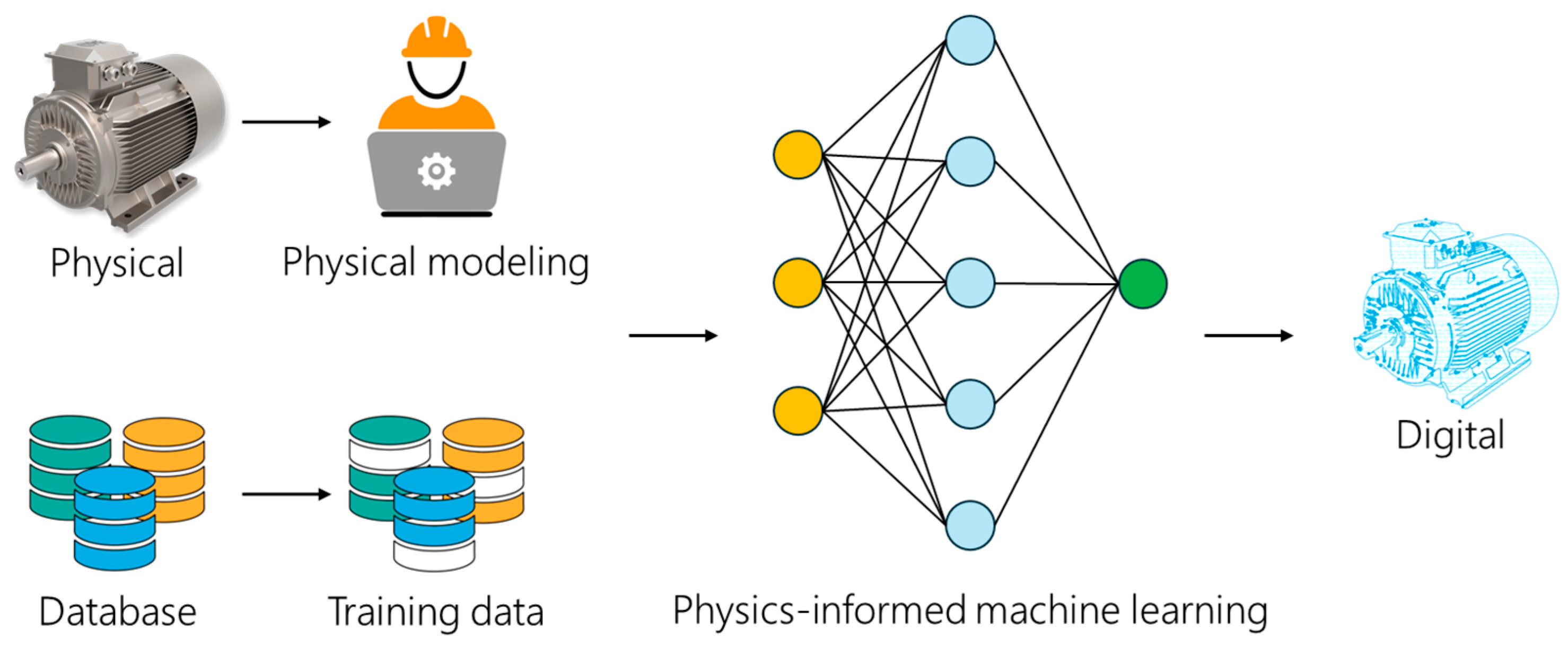
3.3. Integrating Physics-Based and Data-Driven Models
3.4. Reduced Order Modeling (ROM)
4. Possible Applications of Digital Twins in PMSMs
4.1. Real-Time Monitoring, Predictive Maintenance, and Fault Detection
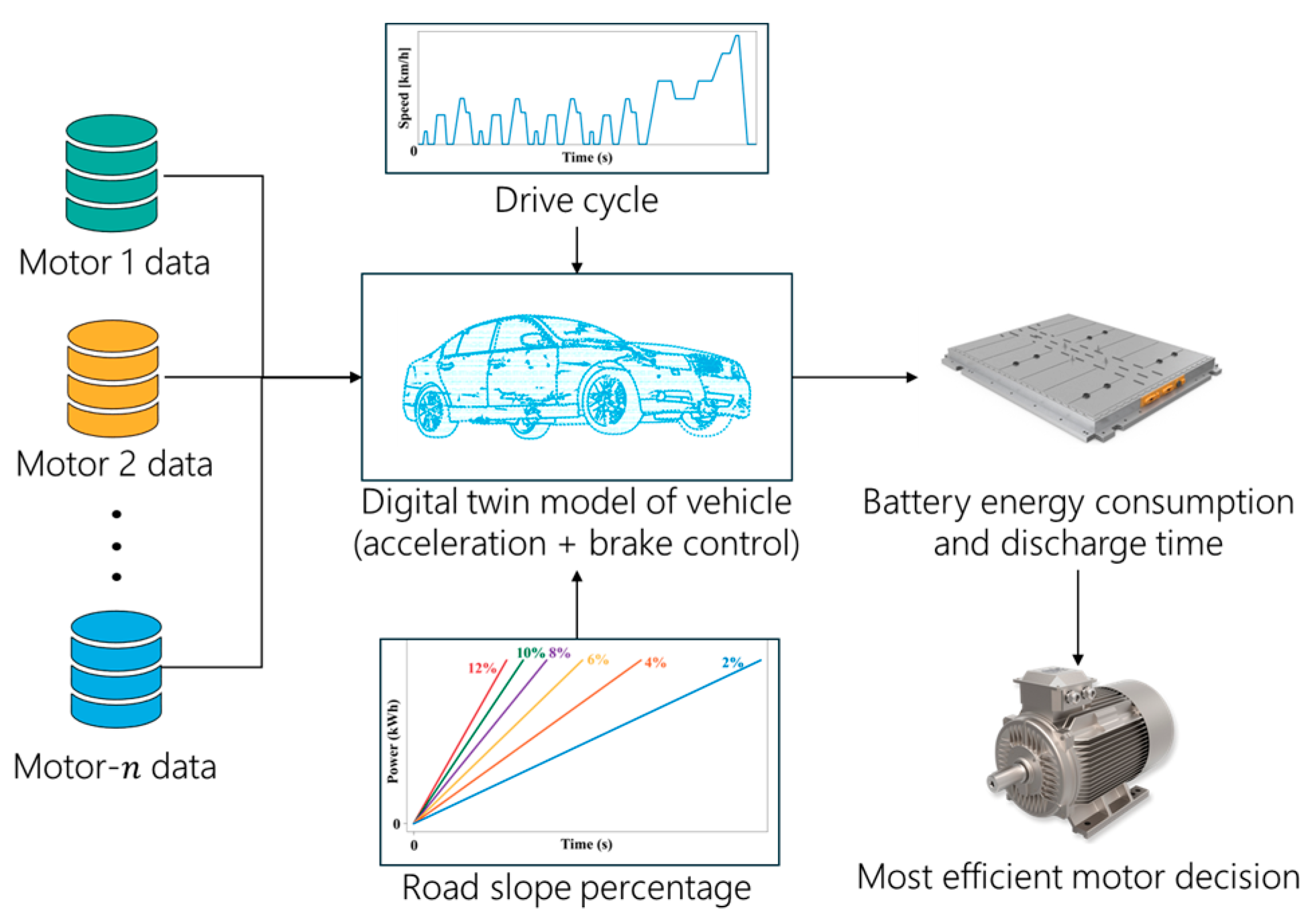
4.2. Power Management
4.3. Integrated Designs
5. Discussions: Challenges and Limitations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Monadi, M.; Nabipour, M.; Akbari-Behbahani, F.; Pouresmaeil, E. Speed Control Techniques for Permanent Magnet Synchronous Motors in Electric Vehicle Applications Toward Sustainable Energy Mobility: A Review. IEEE Access 2024, 12, 119615–119632. [Google Scholar] [CrossRef]
- Song, Y.; Liu, G.; Yu, S.; Wang, H.; Zhang, F. Investigation of a Low-Speed High-Torque-Density Direct-Drive External-Rotor PMSM for Belt Conveyor Application. IEEE Access 2023, 11, 110479–110489. [Google Scholar] [CrossRef]
- Ahsan, M.M.; Liu, Y.; Raman, S.; Siddique, Z. Digital Twins in Additive Manufacturing: A Systematic Review. arXiv 2024, arXiv:2409.00877. [Google Scholar]
- Kuprat, J.; Debbadi, K.; Schaumburg, J.; Liserre, M.; Langwasser, M. Thermal Digital Twin of Power Electronics Modules for Online Thermal Parameter Identification. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 1020–1029. [Google Scholar] [CrossRef]
- Soori, M.; Arezoo, B.; Dastres, R. Virtual Manufacturing in Industry 4.0: A Review. Data Sci. Manag. 2024, 7, 47–63. [Google Scholar] [CrossRef]
- Zhang, S.; Wallscheid, O.; Porrmann, M. Machine Learning for the Control and Monitoring of Electric Machine Drives: Advances and Trends. IEEE Open J. Ind. Appl. 2023, 4, 188–214. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, B.; Xu, S.; Han, T. Fault Diagnosis of Permanent Magnet Synchronous Motor of Coal Mine Belt Conveyor Based on Digital Twin and ISSA-RF. Processes 2022, 10, 1679. [Google Scholar] [CrossRef]
- Bhatti, G.; Mohan, H.; Raja Singh, R. Towards the Future of Smart Electric Vehicles: Digital Twin Technology. Renew. Sustain. Energy Rev. 2021, 141, 110801. [Google Scholar] [CrossRef]
- Hananto, A.L.; Tirta, A.; Herawan, S.G.; Idris, M.; Soudagar, M.E.M.; Djamari, D.W.; Veza, I. Digital Twin and 3D Digital Twin: Concepts, Applications, and Challenges in Industry 4.0 for Digital Twin. Computers 2024, 13, 100. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence Through Virtual Factory Replication; White Paper; Michael Grieves, LLC: Melbourne, FL, USA, 2014; Volume 1, pp. 1–7. [Google Scholar]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y.C. Digital Twin in Industry: State-of-the-Art. IEEE Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Methuselah, J. Digital Twin Technology for Smart Manufacturing. J. Technol. Syst. 2024, 6, 52–65. [Google Scholar] [CrossRef]
- Sepasgozar, S.M.E. Differentiating Digital Twin from Digital Shadow: Elucidating a Paradigm Shift to Expedite a Smart, Sustainable Built Environment. Buildings 2021, 11, 151. [Google Scholar] [CrossRef]
- Tekinerdogan, B.; Verdouw, C. Systems Architecture Design Pattern Catalog for Developing Digital Twins. Sensors 2020, 20, 5103. [Google Scholar] [CrossRef] [PubMed]
- Falekas, G.; Karlis, A. Digital Twin in Electrical Machine Control and Predictive Maintenance: State-of-the-Art and Future Prospects. Energies 2021, 14, 5933. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in Manufacturing: A Categorical Literature Review and Classification. IFAC-PapersOnLine 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Segovia, M.; Garcia-Alfaro, J. Design, Modeling and Implementation of Digital Twins. Sensors 2022, 22, 5396. [Google Scholar] [CrossRef]
- Boyes, H.; Watson, T. Digital Twins: An Analysis Framework and Open Issues. Comput. Ind. 2022, 143, 103763. [Google Scholar] [CrossRef]
- Njoku, J.N.; Nkoro, E.C.; Medina, R.M.; Nwakanma, C.I.; Lee, J.-M.; Kim, D.-S. Leveraging Digital Twin Technology for Battery Management: A Case Study Review. IEEE Access 2025, 13, 21382–21412. [Google Scholar] [CrossRef]
- Chaplin, J.; Martinez-Arellano, G.; Mazzoleni, A. Digital Twins and Intelligent Decision Making. In Digital Manufacturing for SMEs: An Introduction; Chaplin, J., Pagano, C., Fort, S., Eds.; Digit-T: Nottingham, UK, 2020; pp. 159–186. [Google Scholar]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems: New Findings and Approaches; Kahlen, F.-J., Flumerfelt, S., Alves, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar]
- Rai, R.; Sahu, C.K. Driven by Data or Derived Through Physics? A Review of Hybrid Physics Guided Machine Learning Techniques With Cyber-Physical System (CPS) Focus. IEEE Access 2020, 8, 71050–71073. [Google Scholar] [CrossRef]
- Cho, Y.; Noh, S.D. Design and Implementation of Digital Twin Factory Synchronized in Real-Time Using MQTT. Machines 2024, 12, 759. [Google Scholar] [CrossRef]
- Bécue, A.; Maia, E.; Feeken, L.; Borchers, P.; Praça, I. A New Concept of Digital Twin Supporting Optimization and Resilience of Factories of the Future. Appl. Sci. 2020, 10, 4482. [Google Scholar] [CrossRef]
- Tom, A.M.; Febin Daya, J.L. Machine Learning Techniques for Vector Control of Permanent Magnet Synchronous Motor Drives. Cogent Eng. 2024, 11, 2323813. [Google Scholar] [CrossRef]
- Guo, S.; Su, X.; Zhao, H. Optimal Design of an Interior Permanent Magnet Synchronous Motor for Electric Vehicle Applications Using a Machine Learning-Based Surrogate Model. Energies 2024, 17, 3864. [Google Scholar] [CrossRef]
- Goubej, M.; Königsmarková, J.; Kampinga, R.; Nieuwenkamp, J.; Paquay, S. Employing Finite Element Analysis and Robust Control Concepts in Mechatronic System Design-Flexible Manipulator Case Study. Appl. Sci. 2021, 11, 3689. [Google Scholar] [CrossRef]
- Lee, H.; Son, S.; Jeong, D.; Sun, K.H.; Jeon, B.C.; Oh, K.-Y. High-Fidelity Multiphysics Model of a Permanent Magnet Synchronous Motor for Fault Data Generation. J. Sound Vib. 2024, 589, 118573. [Google Scholar] [CrossRef]
- Rahimi, A.; Kanzi, K. High-Frequency Modelling of Permanent Magnet Synchronous Motor for Conducted EMI Studies. IET Electr. Power Appl. 2020, 14, 2027–2036. [Google Scholar] [CrossRef]
- Sarikhani, A.; Mohammed, O.A. Inter-Turn Fault Detection in PM Synchronous Machines by Physics-Based Back Electromotive Force Estimation. IEEE Trans. Ind. Electron. 2013, 60, 3472–3484. [Google Scholar] [CrossRef]
- Sarikhani, A.; Mohammed, O.A. Multiobjective Design Optimization of Coupled PM Synchronous Motor-Drive Using Physics-Based Modeling Approach. IEEE Trans. Magn. 2011, 47, 1266–1269. [Google Scholar] [CrossRef]
- de Paula Machado Bazzo, T.; Kölzer, J.F.; Carlson, R.; Wurtz, F.; Gerbaud, L. Multiphysics Design Optimization of a Permanent Magnet Synchronous Generator. IEEE Trans. Ind. Electron. 2017, 64, 9815–9823. [Google Scholar] [CrossRef]
- Oh, K.; Kim, E.-J.; Park, C.-Y. A Physical Model-Based Data-Driven Approach to Overcome Data Scarcity and Predict Building Energy Consumption. Sustainability 2022, 14, 9464. [Google Scholar] [CrossRef]
- Es-haghi, M.S.; Anitescu, C.; Rabczuk, T. Methods for Enabling Real-Time Analysis in Digital Twins: A Literature Review. Comput. Struct. 2024, 297, 107342. [Google Scholar] [CrossRef]
- Chen, Z.; Liang, D.; Jia, S.; Yang, L.; Yang, S. Incipient Interturn Short-Circuit Fault Diagnosis of Permanent Magnet Synchronous Motors Based on the Data-Driven Digital Twin Model. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 3514–3524. [Google Scholar] [CrossRef]
- Kohtz, S.; Zhao, J.; Renteria, A.; Lalwani, A.; Xu, Y.; Zhang, X.; Haran, K.S.; Senesky, D.; Wang, P. Optimal Sensor Placement for Permanent Magnet Synchronous Motor Condition Monitoring Using a Digital Twin-Assisted Fault Diagnosis Approach. Reliab. Eng. Syst. Saf. 2024, 242, 109714. [Google Scholar] [CrossRef]
- Liu, L.; Guo, Y.; Yin, W.; Lei, G.; Zhu, J. Design and Optimization Technologies of Permanent Magnet Machines and Drive Systems Based on Digital Twin Model. Energies 2022, 15, 6186. [Google Scholar] [CrossRef]
- Li, Z.; Wang, F.; Xie, H.; Ke, D.; Ye, T.; Davari, S.A.; Kennel, R. Data-Driven Diagnosis of PMSM Drive With Self-Sensing Signal Visualization and Deep Transfer Learning. IEEE Trans. Energy Convers. 2024, 39, 1011–1023. [Google Scholar] [CrossRef]
- Cartocci, N.; Napolitano, M.R.; Crocetti, F.; Costante, G.; Valigi, P.; Fravolini, M.L. Data-Driven Fault Diagnosis Techniques: Non-Linear Directional Residual vs. Machine-Learning-Based Methods. Sensors 2022, 22, 2635. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Hu, B.; Xie, K.; Tang, J.; Tai, H.-M. Data-Driven Transmission Defense Planning Against Extreme Weather Events. IEEE Trans. Smart Grid 2020, 11, 2257–2270. [Google Scholar] [CrossRef]
- Bishnu, S.K.; Alnouri, S.Y.; Al-Mohannadi, D.M. Computational Applications Using Data Driven Modeling in Process Systems: A Review. Digit. Chem. Eng. 2023, 8, 100111. [Google Scholar] [CrossRef]
- Mei, Z.; Ding, J.; Chen, L.; Pi, T.; Mei, Z. Hybrid Multi-Domain Analytical and Data-Driven Modeling for Feed Systems in Machine Tools. Symmetry 2019, 11, 1156. [Google Scholar] [CrossRef]
- Son, S.; Lee, H.; Jeong, D.; Oh, K.-Y.; Ho Sun, K. A Novel Physics-Informed Neural Network for Modeling Electromagnetism of a Permanent Magnet Synchronous Motor. Adv. Eng. Inform. 2023, 57, 102035. [Google Scholar] [CrossRef]
- Liu, L.; Yin, W.; Guo, Y. Hybrid Mechanism-Data-Driven Iron Loss Modelling for Permanent Magnet Synchronous Motors Considering Multiphysics Coupling Effects. IET Electr. Power Appl. 2024, 18, 1833–1843. [Google Scholar] [CrossRef]
- Li, H.; Yu, J.; Xiang, D.; Han, J.; Wu, Q. A Hybrid Physics-Based and Data-Driven Approach for Monitoring of Inverter-Fed Machine Stator Insulation Degradations Using Switching Oscillations. IEEE Trans. Ind. Inform. 2024, 20, 9527–9538. [Google Scholar] [CrossRef]
- Asef, P.; Vagg, C. A Physics-Informed Bayesian Optimization Method for Rapid Development of Electrical Machines. Sci. Rep. 2024, 14, 4526. [Google Scholar] [CrossRef]
- Hartmann, D.; Herz, M.; Wever, U. Model Order Reduction a Key Technology for Digital Twins. In Reduced-Order Modeling (ROM) for Simulation and Optimization: Powerful Algorithms as Key Enablers for Scientific Computing; Keiper, W., Milde, A., Volkwein, S., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 167–179. [Google Scholar]
- de Parga, S.A.; Bravo, J.R.; Sibuet, N.; Hernandez, J.A.; Rossi, R.; Boschert, S.; Quintana-Ortí, E.S.; Tomás, A.E.; Tatu, C.C.; Vázquez-Novoa, F.; et al. Parallel Reduced Order Modeling for Digital Twins Using High-Performance Computing Workflows. arXiv 2024, arXiv:2409.09080. [Google Scholar]
- Kapteyn, M.G.; Knezevic, D.J.; Willcox, K. Toward Predictive Digital Twins via Component-Based Reduced-Order Models and Interpretable Machine Learning. In AIAA Scitech 2020 Forum; AIAA SciTech Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020. [Google Scholar]
- Sancarlos, A.; Ghnatios, C.; Duval, J.-L.; Zerbib, N.; Cueto, E.; Chinesta, F. Fast Computation of Multi-Parametric Electromagnetic Fields in Synchronous Machines by Using PGD-Based Fully Separated Representations. Energies 2021, 14, 1454. [Google Scholar] [CrossRef]
- Ghnatios, C.; Rodriguez, S.; Tomezyk, J.; Dupuis, Y.; Mouterde, J.; Da Silva, J.; Chinesta, F. A Hybrid Twin Based on Machine Learning Enhanced Reduced Order Model for Real-Time Simulation of Magnetic Bearings. Adv. Model. Simul. Eng. Sci. 2024, 11, 3. [Google Scholar] [CrossRef]
- Santos, J.F.D.; Tshoombe, B.K.; Santos, L.H.B.; Araújo, R.C.F.; Manito, A.R.A.; Fonseca, W.S.; Silva, M.O. Digital Twin-Based Monitoring System of Induction Motors Using IoT Sensors and Thermo-Magnetic Finite Element Analysis. IEEE Access 2023, 11, 1682–1693. [Google Scholar] [CrossRef]
- Singh, R.R.; Bhatti, G.; Kalel, D.; Vairavasundaram, I.; Alsaif, F. Building a Digital Twin Powered Intelligent Predictive Maintenance System for Industrial AC Machines. Machines 2023, 11, 796. [Google Scholar] [CrossRef]
- Zhong, D.; Xia, Z.; Zhu, Y.; Duan, J. Overview of Predictive Maintenance Based on Digital Twin Technology. Heliyon 2023, 9, e14534. [Google Scholar] [CrossRef]
- Liu, Z.; Lang, Z.-Q.; Gui, Y.; Zhu, Y.-P.; Laalej, H. Digital Twin-Based Anomaly Detection for Real-Time Tool Condition Monitoring in Machining. J. Manuf. Syst. 2024, 75, 163–173. [Google Scholar] [CrossRef]
- Daraba, D.; Pop, F.; Daraba, C. Digital Twin Used in Real-Time Monitoring of Operations Performed on CNC Technological Equipment. Appl. Sci. 2024, 14, 10088. [Google Scholar] [CrossRef]
- Polat, A.O.; Erden, B.C.; Kul, S.; Nasiroglu, F. Light Electric Vehicle Performance with Digital Twin Technology: A Comparison of Motor Types. Arab. J. Sci. Eng. 2024, 49, 7209–7222. [Google Scholar] [CrossRef]
- Mansour, D.-E.A.; Numair, M.; Zalhaf, A.S.; Ramadan, R.; Darwish, M.M.F.; Huang, Q.; Hussien, M.G.; Abdel-Rahim, O. Applications of IoT and Digital Twin in Electrical Power Systems: A Comprehensive Survey. IET Gener. Transm. Distrib. 2023, 17, 4457–4479. [Google Scholar] [CrossRef]
- Ibrahim, M.; Rjabtšikov, V.; Gilbert, R. Overview of Digital Twin Platforms for EV Applications. Sensors 2023, 23, 1414. [Google Scholar] [CrossRef] [PubMed]
- Amadou Adamou, A.; Alaoui, C. Energy Efficiency Model-Based Digital Shadow for Induction Motors: Towards the Implementation of a Digital Twin. Eng. Sci. Technol. Int. J. 2023, 44, 101469. [Google Scholar] [CrossRef]
- Fu, Y.; Zhu, G.; Zhu, M.; Xuan, F. Digital Twin for Integration of Design-Manufacturing-Maintenance: An Overview. Chin. J. Mech. Eng. 2022, 35, 80. [Google Scholar] [CrossRef]
- Liu, X. A New Perspective on Digital Twin-Based Mechanical Design in Industrial Engineering. Innov. Appl. Eng. Technol. 2023, 2, 1–8. [Google Scholar] [CrossRef]
- Wang, C.; Li, Y. Digital-Twin-Aided Product Design Framework For IoT Platforms. IEEE Internet Things J. 2022, 9, 9290–9300. [Google Scholar] [CrossRef]
- Zhang, H.; Li, R.; Ding, G.; Qin, S.; Zheng, Q.; He, X. Nominal Digital Twin for New-Generation Product Design. Int. J. Adv. Manuf. Technol. 2023, 128, 1317–1335. [Google Scholar] [CrossRef]
- Lo, C.K.; Chen, C.H.; Zhong, R.Y. A Review of Digital Twin in Product Design and Development. Adv. Eng. Inform. 2021, 48, 101297. [Google Scholar] [CrossRef]
- Mihai, S.; Yaqoob, M.; Hung, D.V.; Davis, W.; Towakel, P.; Raza, M.; Karamanoglu, M.; Barn, B.; Shetve, D.; Prasad, R.V.; et al. Digital Twins: A Survey on Enabling Technologies, Challenges, Trends and Future Prospects. IEEE Commun. Surv. Tutor. 2022, 24, 2255–2291. [Google Scholar] [CrossRef]
- Sharma, A.; Kosasih, E.; Zhang, J.; Brintrup, A.; Calinescu, A. Digital Twins: State of the Art Theory and Practice, Challenges, and Open Research Questions. J. Ind. Inf. Integr. 2022, 30, 100383. [Google Scholar] [CrossRef]
- Attaran, M.; Celik, B.G. Digital Twin: Benefits, Use Cases, Challenges, and Opportunities. Decis. Anal. J. 2023, 6, 100165. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physics-Based | Data-Driven | Hybrid | |
|---|---|---|---|
| Based on | Physical behaviors | Historical and/or real-time data | Both physical laws and data |
| Common examples |
|
| Physics-informed neural networks (PINNs) |
| Accuracy | High | Varies (high potential with optimal data and algorithms) | High (if well integrated) |
| Interpretability | High | Low (without domain knowledge) | High |
| Computational demand | High | Variable, often high during training phases | Potentially reduced through efficient integration methods |
| Best to use in |
|
|
|
| Ref. | Focus Area | Application | Methodology | Result |
|---|---|---|---|---|
| [27] | Physics-based modeling of mechatronic systems | DT modeling for a flexible manipulator |
|
|
| [28] | High-fidelity multiphysics modeling of PMSMs | Fault data generation for PMSM diagnosis |
|
|
| [29] | High-frequency modeling of PMSMs | EMI studies in variable-speed drive systems |
|
|
| [30] | Physics-based back-EMF modeling | Inter-turn fault detection in PMSMs |
|
|
| [31] | Physics-based multiphysics modeling for motor-drive optimization | Multi-objective optimization of PMSMs for reduced torque ripple and improved efficiency |
|
|
| [32] | Physics-based multiphysics modeling | Cost and efficiency optimization of a 55 kW PMSG for wind energy conversion |
|
|
| [33] | Physics-based data-driven modeling | Building energy consumption prediction |
|
|
| [34] | Computational modeling for real-time DT (Review) | Reducing computational demands in Digital Twin applications |
|
|
| [35] | Data-driven DT modeling | Early detection of inter-turn short-circuit faults in PMSMs |
|
|
| [36] | Data-driven DT modeling | Optimal sensor placement for PMSM condition monitoring |
|
|
| [37] | Multiphysics-based DT modeling | Design and optimization of PMSMs and drive systems |
|
|
| [38] | Data-driven fault diagnosis modeling | Fault diagnosis in PMSM drive systems using self-sensing signals |
|
|
| [39] | Nonlinear residual-based fault diagnosis modeling | Fault isolation and estimation in nonlinear systems |
|
|
| [40] | Data-driven resilience modeling | Transmission defense planning against extreme weather events |
|
|
| [41] | Data-driven computational modeling (Review) | Machine learning applications in chemical and industrial processes |
|
|
| [42] | Hybrid multi-domain analytical and data-driven modeling | Tracking error prediction for ball screw feed systems in CNC machine tools driven by PMSM |
|
|
| [43] | Physics-informed neural network (PINN) | Estimating the electromagnetic response of a PMSM |
|
|
| [44] | Hybrid mechanism-data-driven iron loss modeling | Iron loss estimation in PMSMs considering multiphysics coupling effects |
|
|
| [45] | Hybrid physics-based and data-driven modeling | Monitoring stator insulation degradation in inverter-fed PMSMs |
|
|
| [46] | Physics-informed Bayesian optimization | Rapid optimization of slot fill factor in traction motors |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lukman, G.F.; Lee, C. Towards Digital Twin Modeling and Applications for Permanent Magnet Synchronous Motors. Energies 2025, 18, 956. https://doi.org/10.3390/en18040956
Lukman GF, Lee C. Towards Digital Twin Modeling and Applications for Permanent Magnet Synchronous Motors. Energies. 2025; 18(4):956. https://doi.org/10.3390/en18040956
Chicago/Turabian StyleLukman, Grace Firsta, and Cheewoo Lee. 2025. "Towards Digital Twin Modeling and Applications for Permanent Magnet Synchronous Motors" Energies 18, no. 4: 956. https://doi.org/10.3390/en18040956
APA StyleLukman, G. F., & Lee, C. (2025). Towards Digital Twin Modeling and Applications for Permanent Magnet Synchronous Motors. Energies, 18(4), 956. https://doi.org/10.3390/en18040956