
Combined State-of-Charge Estimation Method for Lithium-Ion Batteries Using Long Short-Term Memory Network and Unscented Kalman Filter



Abstract
:1. Introduction
- (1)
- A Thevenin model was established. Then, the particle swarm optimization (PSO) algorithm was utilized to determine the unknown parameters of the battery model. The model accuracy was verified under specified working conditions.
- (2)
- To obtain key parameters involved in the UKF estimation errors, combined with identified battery model parameters, the UKF was utilized to preliminarily calculate the battery SOC under the training condition. These key characteristic parameters were subsequently used to train the LSTM network. The trained LSTM network was employed to mitigate the UKF estimation errors, thereby enhancing the estimation performance of the UKF.
- (3)
- The UKF-LSTM was evaluated under different working conditions. The verified results demonstrate that the joint estimation approach proposed in this research yields precise SOC estimation, surpassing the accuracy of the EKF and UKF.
2. Experiment of Battery
3. Battery Model and Parameter Identification
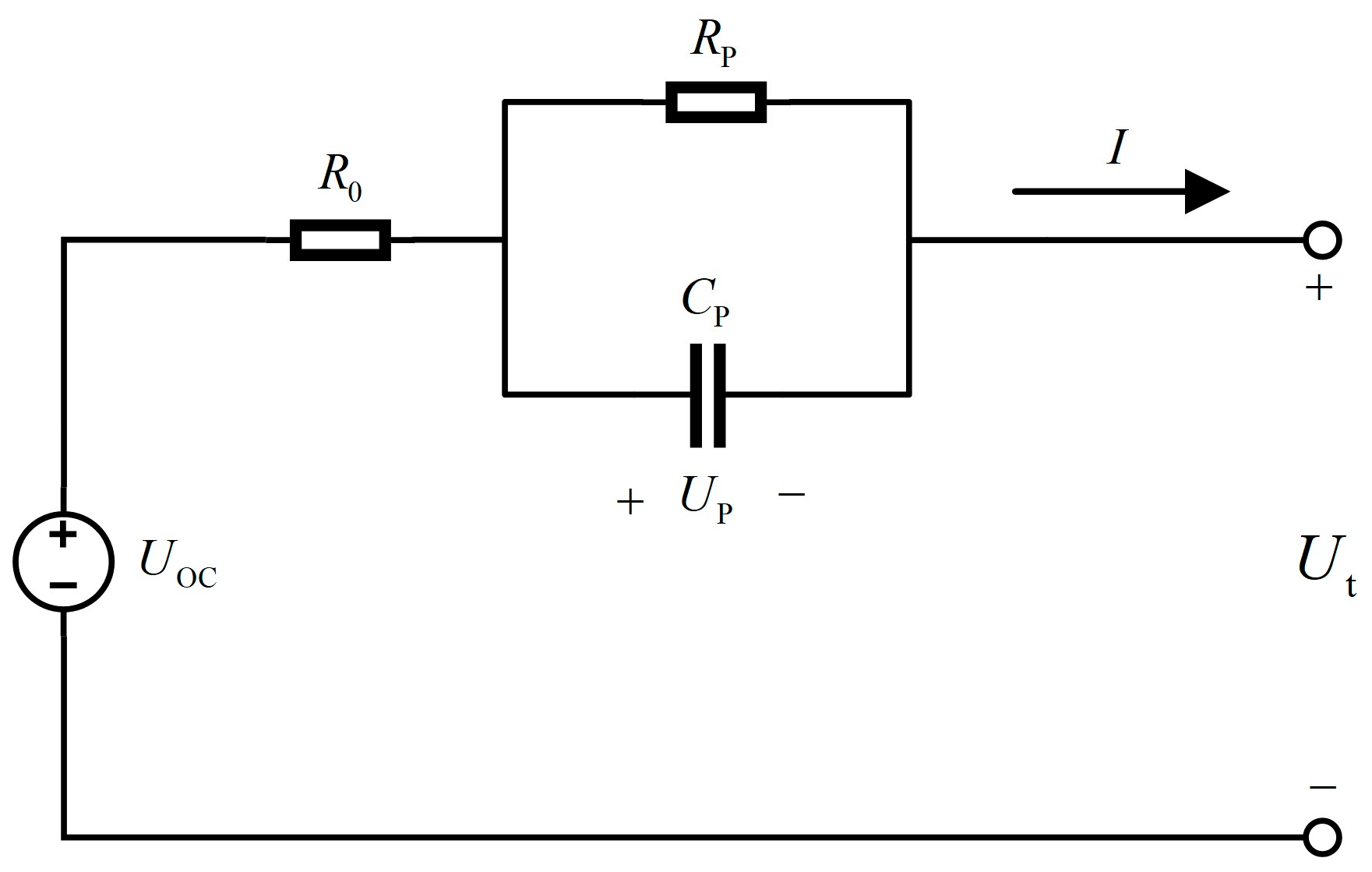
3.1. Battery Model
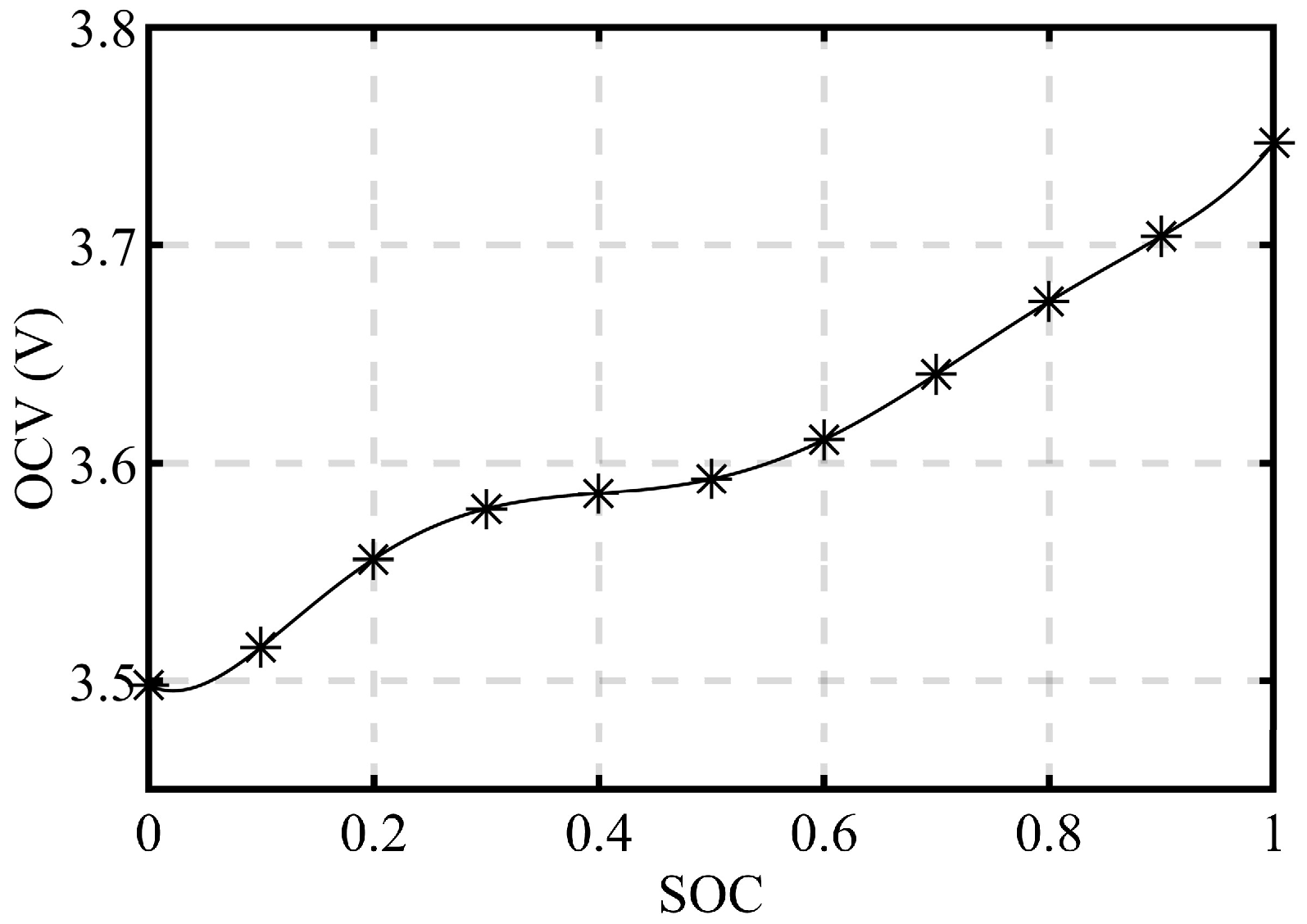
3.2. Parameter Identification
4. Method for SOC Estimation
4.1. The UKF Method
4.2. The LSTM Network Method
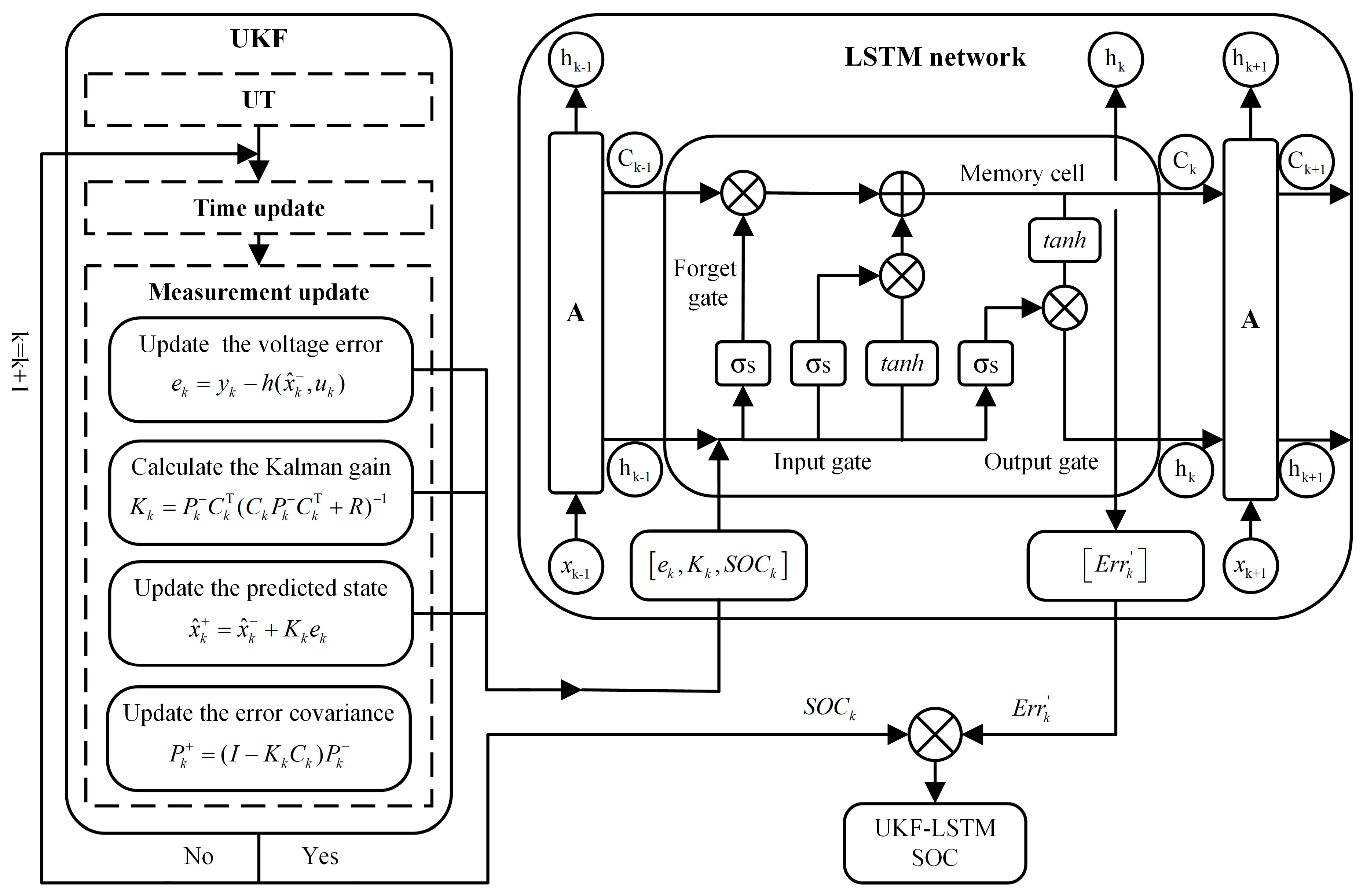
4.3. Improving the UKF Method Using LSTM Network
5. Results and Discussions
5.1. Verification of Parameter Identification
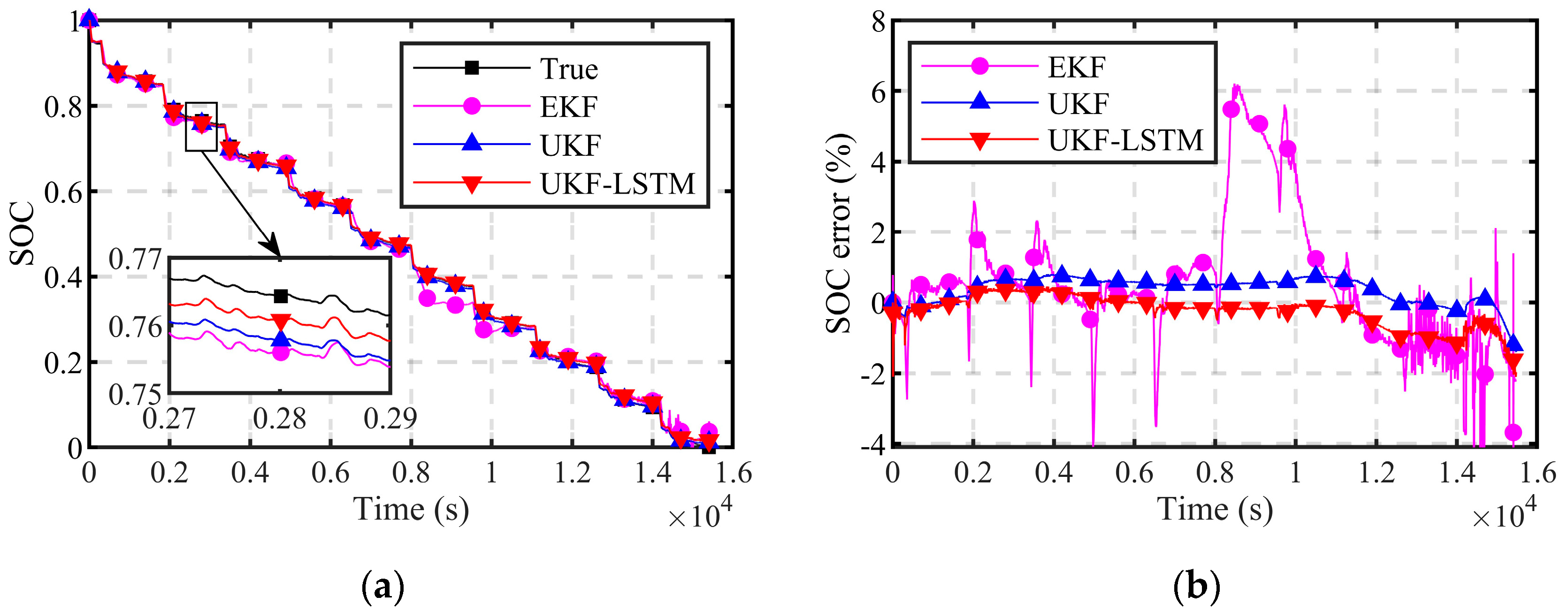
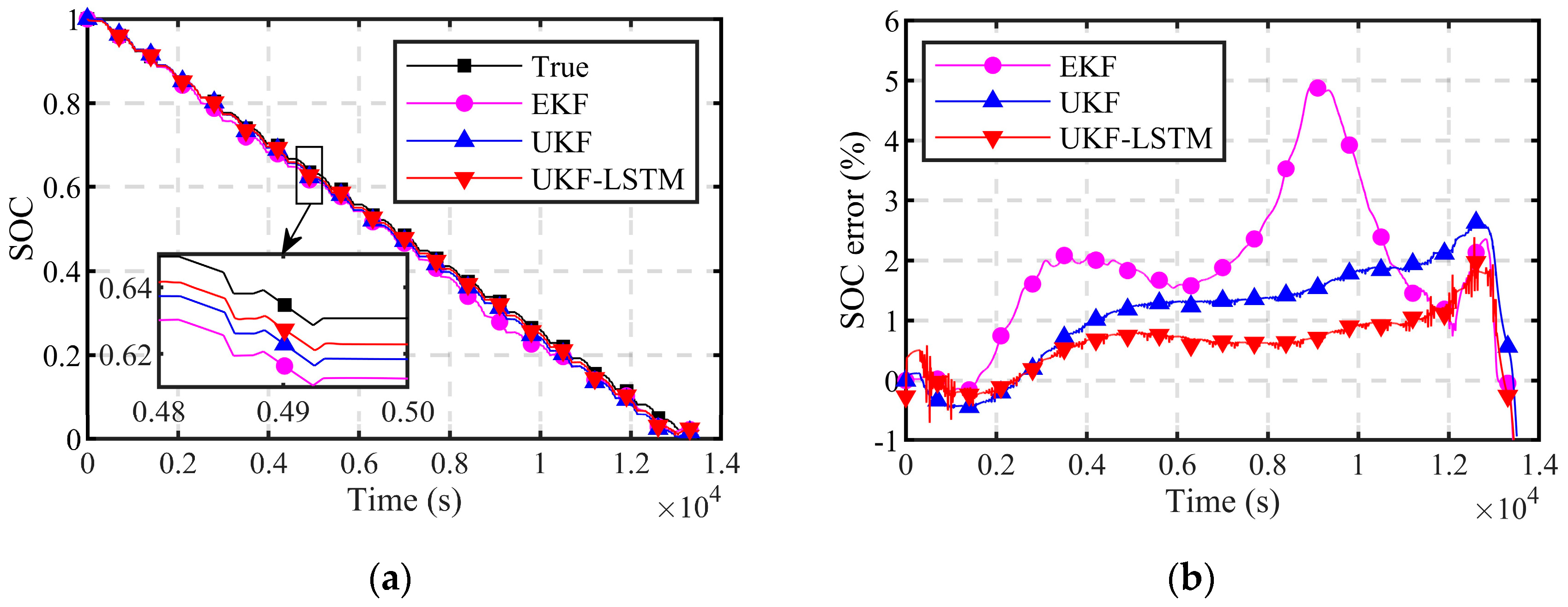
5.2. Analysis of SOC Estimation Results
6. Conclusions
- (1)
- In this study, the Thevenin model was used to characterize the battery. The unknown parameters of the battery model were obtained by the PSO algorithm, and the model accuracy was verified using the UDDS test. The validation results demonstrate that PSO could accurately identify the model parameters, and the Thevenin model could effectively characterize the battery.
- (2)
- A joint UKF-LSTM algorithm is proposed, which utilizes an LSTM network to correct the estimation error of the UKF. The LSTM network is trained using feature parameters that affect the UKF estimation error. Then, the LSTM network is employed to reduce the error of the UKF, thereby improving its SOC estimation performance.
- (3)
- The HPPC test data were used for training, while experimental data from the UDDS tests and DSTs were employed for validation. The results indicate that the RMSE of the UKF-LSTM could be controlled under 0.6132% under both validation conditions. Compared to that of the UKF, the RMSE of the proposed algorithm decreased by 0.1184% and 0.4936% in the UDDS tests and DSTs, respectively. In summary, the UKF-LSTM exhibited high accuracy and robustness in the SOC estimation, thus ensuring the reliability of SOC estimates.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, W.; Zheng, Y.; Pan, Z.; Lu, Q. Review on the Battery Model and SOC Estimation Method. Processes 2021, 9, 1685. [Google Scholar] [CrossRef]
- Du, X.; Meng, J.; Peng, J. Hybrid Pseudorandom Sequence for Broadband Impedance Measurements of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2023, 70, 6856–6864. [Google Scholar] [CrossRef]
- Lyu, W.; Fu, H.; Rao, A.M.; Lu, Z.; Yu, X.; Lin, Y.; Zhou, J.; Lu, B. Permeable Void-Free Interface for All-Solid-State Alkali-Ion Polymer Batteries. Sci. Adv. 2024, 10, eadr9602. [Google Scholar] [CrossRef] [PubMed]
- Lyu, W.; Yu, X.; Lv, Y.; Rao, A.M.; Zhou, J.; Lu, B. Building Stable Solid-State Potassium Metal Batteries. Adv. Mater. 2024, 36, 2305795. [Google Scholar] [CrossRef] [PubMed]
- Xia, M.; Zhou, J.; Lu, B. Comprehensive Insights into Aqueous Potassium-Ion Batteries. Adv. Energy Mater. 2024, 2404032. [Google Scholar] [CrossRef]
- Semeraro, C.; Caggiano, M.; Olabi, A.-G.; Dassisti, M. Battery Monitoring and Prognostics Optimization Techniques: Challenges and Opportunities. Energy 2022, 255, 124538. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Yang, R.; Li, H. A Novel Data-Driven Method for Mining Battery Open-Circuit Voltage Characterization. Green Energy Intell. Transp. 2022, 1, 100001. [Google Scholar] [CrossRef]
- Xiong, X.; Wang, S.-L.; Fernandez, C.; Yu, C.-M.; Zou, C.-Y.; Jiang, C. A Novel Practical State of Charge Estimation Method: An Adaptive Improved Ampere-Hour Method Based on Composite Correction Factor. Int. J. Energy Res. 2020, 44, 11385–11404. [Google Scholar] [CrossRef]
- Shrivastava, P.; Naidu, P.A.; Sharma, S.; Panigrahi, B.K.; Garg, A. Review on Technological Advancement of Lithium-Ion Battery States Estimation Methods for Electric Vehicle Applications. J. Energy Storage 2023, 64, 107159. [Google Scholar] [CrossRef]
- Wang, W.; Fu, R. Stability Analysis of EKF-Based SOC Observer for Lithium-Ion Battery. Energies 2023, 16, 5946. [Google Scholar] [CrossRef]
- Yao, B.; Cai, Y.; Liu, W.; Wang, Y.; Chen, X.; Liao, Q.; Fu, Z.; Cheng, Z. State-of-Charge Estimation for Lithium-Ion Batteries Based on Modified Unscented Kalman Filter Using Improved Parameter Identification. Int. J. Electrochem. Sci. 2024, 19, 100574. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Cao, P.; Zhu, T.; Shu, H.; Chen, J.; Zhang, J.; Zhu, J. Classification, Summarization and Perspectives on State-of-Charge Estimation of Lithium-Ion Batteries Used in Electric Vehicles: A Critical Comprehensive Survey. J. Energy Storage 2021, 39, 102572. [Google Scholar] [CrossRef]
- Sangeetha, E.P.; Subashini, N.; Santhosh, T.K.; Lindiya, S.A.; Uma, D. Validation of EKF Based SoC Estimation Using Vehicle Dynamic Modelling for Range Prediction. Electr. Power Syst. Res. 2024, 226, 109905. [Google Scholar] [CrossRef]
- Vedhanayaki, S.; Indragandhi, V. Certain Investigation and Implementation of Coulomb Counting Based Unscented Kalman Filter for State of Charge Estimation of Lithium-Ion Batteries Used in Electric Vehicle Application. Int. J. Thermofluids 2023, 18, 100335. [Google Scholar] [CrossRef]
- Wang, S.; Dang, Q.; Gao, Z.; Li, B.; Fernandez, C.; Blaabjerg, F. An Innovative Square Root-Untraced Kalman Filtering Strategy with Full-Parameter Online Identification for State of Power Evaluation of Lithium-Ion Batteries. J. Energy Storage 2024, 104, 114555. [Google Scholar] [CrossRef]
- Yu, Q.; Liu, Y.; Long, S.; Jin, X.; Li, J.; Shen, W. A Branch Current Estimation and Correction Method for a Parallel Connected Battery System Based on Dual BP Neural Networks. Green Energy Intell. Transp. 2022, 1, 100029. [Google Scholar] [CrossRef]
- Dhaked, D.K.; Dadhich, S.; Birla, D. Power Output Forecasting of Solar Photovoltaic Plant Using LSTM. Green Energy Intell. Transp. 2023, 2, 100113. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, T. Deep Learning-Based Battery State of Charge Estimation: Enhancing Estimation Performance with Unlabelled Training Samples. J. Energy Chem. 2023, 80, 48–57. [Google Scholar] [CrossRef]
- Mao, X.; Song, S.; Ding, F. Optimal BP Neural Network Algorithm for State of Charge Estimation of Lithium-Ion Battery Using PSO with Levy Flight. J. Energy Storage 2022, 49, 104139. [Google Scholar] [CrossRef]
- Almaita, E.; Alshkoor, S.; Abdelsalam, E.; Almomani, F. State of Charge Estimation for a Group of Lithium-Ion Batteries Using Long Short-Term Memory Neural Network. J. Energy Storage 2022, 52, 104761. [Google Scholar] [CrossRef]
- Chai, X.; Li, S.; Liang, F. A Novel Battery SOC Estimation Method Based on Random Search Optimized LSTM Neural Network. Energy 2024, 306, 132583. [Google Scholar] [CrossRef]
- El Fallah, S.; Kharbach, J.; Hammouch, Z.; Rezzouk, A.; Jamil, M.O. State of Charge Estimation of an Electric Vehicle’s Battery Using Deep Neural Networks: Simulation and Experimental Results. J. Energy Storage 2023, 62, 106904. [Google Scholar] [CrossRef]
- Zhao, X.; Sun, B.; Zhang, W.; He, X.; Ma, S.; Zhang, J.; Liu, X. Error Theory Study on EKF-Based SOC and Effective Error Estimation Strategy for Li-Ion Batteries. Appl. Energy 2024, 353, 121992. [Google Scholar] [CrossRef]
- Zeng, Y.; Li, Y.; Yang, T. State of Charge Estimation for Lithium-Ion Battery Based on Unscented Kalman Filter and Long Short-Term Memory Neural Network. Batteries 2023, 9, 358. [Google Scholar] [CrossRef]
- Pei, Z.; Liu, K.; Zhang, S.; Chen, X. Optimized EKF Algorithm Using TSO-BP Neural Network for Lithium Battery State of Charge Estimation. J. Energy Storage 2023, 73, 108882. [Google Scholar] [CrossRef]
- Lin, Q.; Li, X.; Tu, B.; Cao, J.; Zhang, M.; Xiang, J. Stable and Accurate Estimation of SOC Using eXogenous Kalman Filter for Lithium-Ion Batteries. Sensors 2023, 23, 467. [Google Scholar] [CrossRef]
- Kim, W.; Lee, P.-Y.; Kim, J.; Kim, K.-S. A Robust State of Charge Estimation Approach Based on Nonlinear Battery Cell Model for Lithium-Ion Batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 5638–5647. [Google Scholar] [CrossRef]
- Khan, Z.A.; Shrivastava, P.; Amrr, S.M.; Mekhilef, S.; Algethami, A.A.; Seyedmahmoudian, M.; Stojcevski, A. A Comparative Study on Different Online State of Charge Estimation Algorithms for Lithium-Ion Batteries. Sustainability 2022, 14, 7412. [Google Scholar] [CrossRef]
- Tang, A.; Yao, L.; Gong, P.; Jiang, Y. Lithium-Ion Battery State-of-Charge Estimation of an Order-Reduced Physics-Based Model in Electric Vehicles Considering Erroneous Initialization. Int. J. Energy Res. 2022, 46, 3529–3538. [Google Scholar] [CrossRef]
- Baccouche, I.; Jemmali, S.; Manai, B.; Omar, N.; Amara, N.E.B. Improved OCV Model of a Li-Ion NMC Battery for Online SOC Estimation Using the Extended Kalman Filter. Energies 2017, 10, 764. [Google Scholar] [CrossRef]
- Chen, L.; Wu, X.; Lopes, A.M.; Yin, L.; Li, P. Adaptive State-of-Charge Estimation of Lithium-Ion Batteries Based on Square-Root Unscented Kalman Filter. Energy 2022, 252, 123972. [Google Scholar] [CrossRef]
- Wang, C.; Xu, M.; Zhang, Q.; Feng, J.; Jiang, R.; Wei, Y.; Liu, Y. Parameters Identification of Thevenin Model for Lithium-Ion Batteries Using Self-Adaptive Particle Swarm Optimization Differential Evolution Algorithm to Estimate State of Charge. J. Energy Storage 2021, 44, 103244. [Google Scholar] [CrossRef]
- Takyi-Aninakwa, P.; Wang, S.; Liu, G.; Bage, A.N.; Bobobee, E.D.; Appiah, E.; Huang, Q. Enhanced Extended-Input LSTM with an Adaptive Singular Value Decomposition UKF for LIB SOC Estimation Using Full-Cycle Current Rate and Temperature Data. Appl. Energy 2024, 363, 123056. [Google Scholar] [CrossRef]
- Hossain, M.; Haque, M.E.; Arif, M.T. Kalman Filtering Techniques for the Online Model Parameters and State of Charge Estimation of the Li-Ion Batteries: A Comparative Analysis. J. Energy Storage 2022, 51, 104174. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Wu, J.; Cheng, W.; Zhu, Q. SOC Estimation for Lithium-Ion Battery Using the LSTM-RNN with Extended Input and Constrained Output. Energy 2023, 262, 125375. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, S.; Li, W.; Miao, Q. State-of-Charge Estimation of Lithium-Ion Batteries Using LSTM and UKF. Energy 2020, 201, 117664. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Normal Capacity | Normal Voltage | Voltage Range | Temperature Range |
|---|---|---|---|
| 2 Ah | 3.6 V | [3.0, 4.1] V | [−10, 45] °C |
| SOC (100%) | R0 (Ω) | Rp (Ω) | |
|---|---|---|---|
| 100 | 0.0429 | 0.0127 | 18.8830 |
| 90 | 0.0432 | 0.0198 | 25.1113 |
| 80 | 0.0435 | 0.0200 | 26.4768 |
| 70 | 0.0427 | 0.0200 | 24.7980 |
| 60 | 0.0433 | 0.0199 | 35.9415 |
| 50 | 0.0433 | 0.0160 | 28.5256 |
| 40 | 0.0436 | 0.0170 | 30.2397 |
| 30 | 0.0437 | 0.0160 | 25.9252 |
| 20 | 0.0455 | 0.0200 | 30.5394 |
| 10 | 0.0653 | 0.0200 | 47.8707 |
| Methods | MAE (%) | RMSE (%) |
|---|---|---|
| EKF | 1.3469 | 0.5568 |
| UKF | 0.4480 | 0.3588 |
| UKF-LSTM | 0.3628 | 0.2404 |
| Methods | MAE (%) | RMSE (%) |
|---|---|---|
| EKF | 1.8460 | 1.8027 |
| UKF | 1.2085 | 1.1068 |
| UKF-LSTM | 0.6841 | 0.6132 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pu, L.; Wang, C. Combined State-of-Charge Estimation Method for Lithium-Ion Batteries Using Long Short-Term Memory Network and Unscented Kalman Filter. Energies 2025, 18, 1106. https://doi.org/10.3390/en18051106
Pu L, Wang C. Combined State-of-Charge Estimation Method for Lithium-Ion Batteries Using Long Short-Term Memory Network and Unscented Kalman Filter. Energies. 2025; 18(5):1106. https://doi.org/10.3390/en18051106
Chicago/Turabian StylePu, Long, and Chun Wang. 2025. "Combined State-of-Charge Estimation Method for Lithium-Ion Batteries Using Long Short-Term Memory Network and Unscented Kalman Filter" Energies 18, no. 5: 1106. https://doi.org/10.3390/en18051106
APA StylePu, L., & Wang, C. (2025). Combined State-of-Charge Estimation Method for Lithium-Ion Batteries Using Long Short-Term Memory Network and Unscented Kalman Filter. Energies, 18(5), 1106. https://doi.org/10.3390/en18051106