1. Introduction
Increasing attention paid to safe and high-reliability operation of AC machines in traction applications have intensified efforts to investigate multiphase fault-tolerant drives and their control strategies [
1,
2]. Four, five and six phase permanent magnet synchronous machines (PMSMs) have been research hotspots in recent decades [
3,
4,
5,
6,
7]. The six-phase PMSM is often considered as an excellent candidate for high-performance and high fault-tolerant capability [
8,
9].
The PMSM equipped with fractional slot concentrated winding (FSCW) is becoming more and more popular in electric propulsion applications [
10,
11,
12]. Such a machine has a fractional number of slots per pole. The concentrated coils of each stator phase are wound either on adjacent teeth or on alternate teeth, which reduces the copper loss in end windings [
13]. Also, it can be automatically fabricated so as to increase slot fill factor. What’s more, alternate-teeth-wound FSCWs eliminate short-circuit faults between phases and have a relatively low mutual inductance compared with overlapped windings, which provide an insight into electrical, magnetic, thermal and physical isolation of phase windings [
14]. Besides, it has been found that an improvement in the flux weakening capability of a surface-mounted PMSM can be achieved by employing FSCWs [
15,
16].
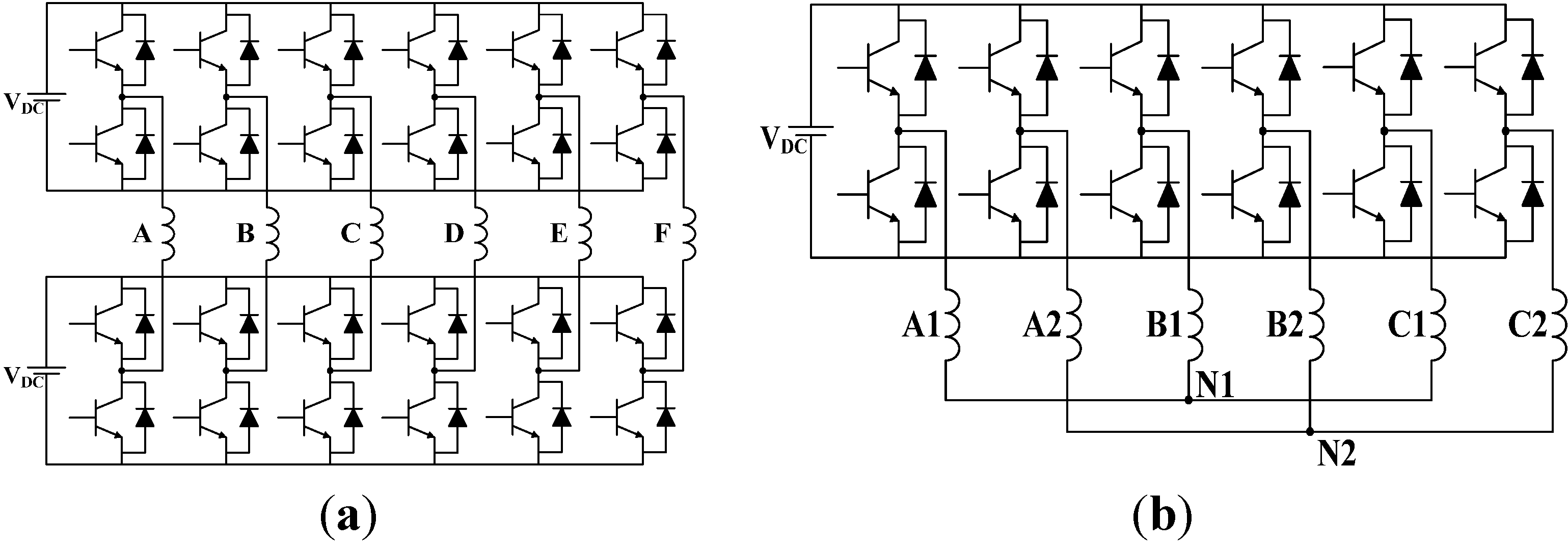
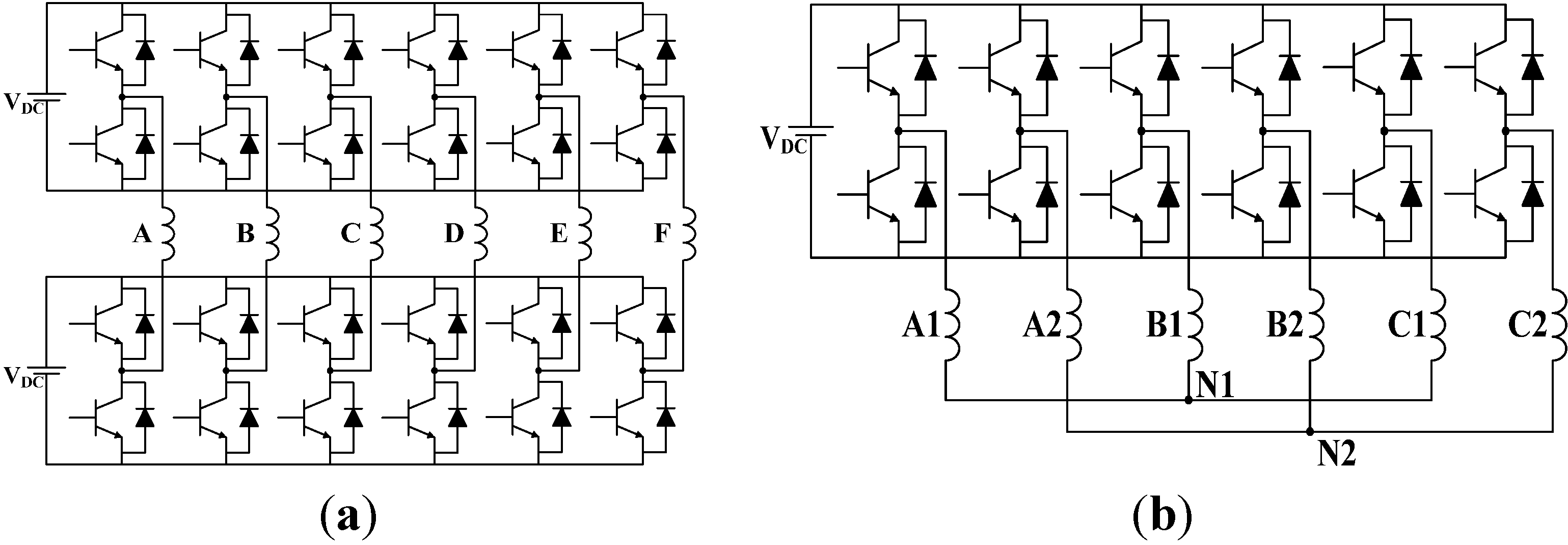
Recently, an increasing interest in open winding AC machines is noticed. The configuration of an inverter for an open winding machine compared with a conventional inverter for wye-connection winding is shown in
Figure 1(a) and (b), respectively. The open winding machine benefits a lot from canceling the connection between phase windings and using full bridge converters [
17,
18]. The open winding machine and its control system make phase-deficiency operation possible. Besides, higher power rating, more active pulse width modulation (PWM) states and new flux weakening techniques are potential advantages. Research on open windings puts more efforts on the safe operation of electrical machines [
19,
20].
Figure 1.
Configurations of inverter for open winding PMSMs and Y-connected winding: (a) Full-bridge-inverters-fed open winding; (b) Half-bridge-inverters-fed Y-connected winding.
Figure 1.
Configurations of inverter for open winding PMSMs and Y-connected winding: (a) Full-bridge-inverters-fed open winding; (b) Half-bridge-inverters-fed Y-connected winding.
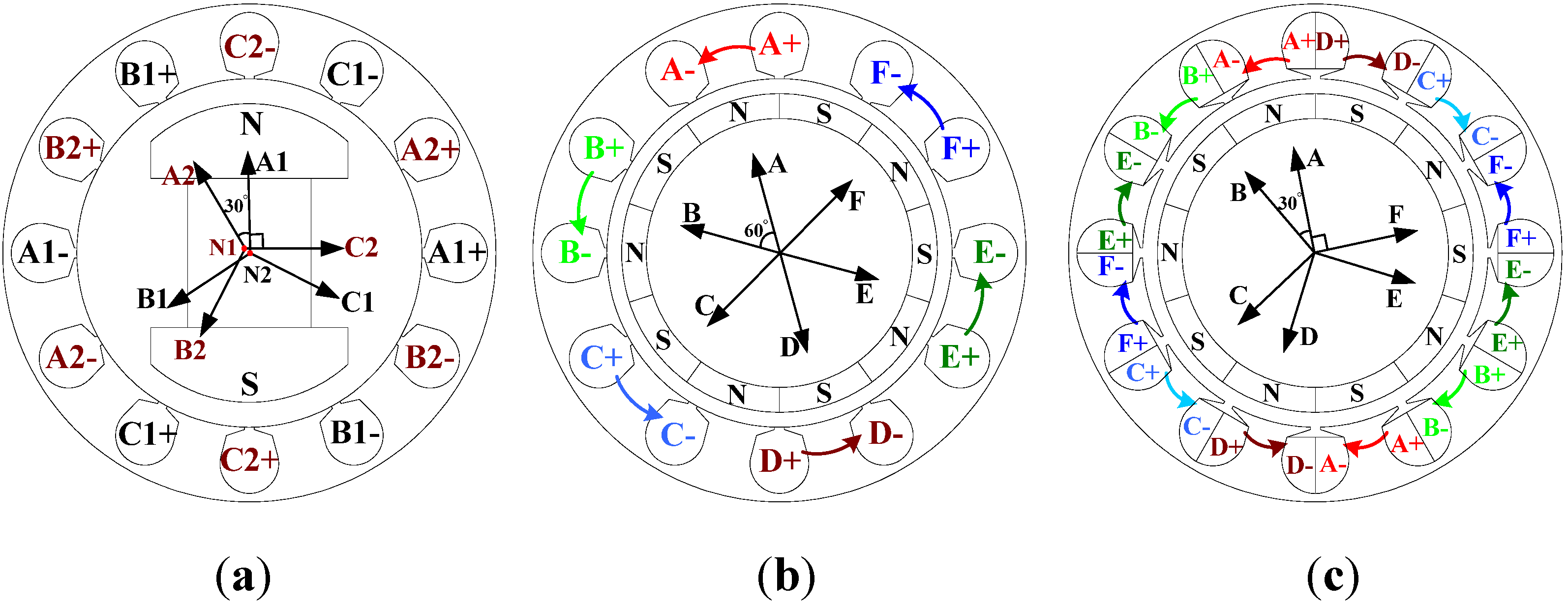
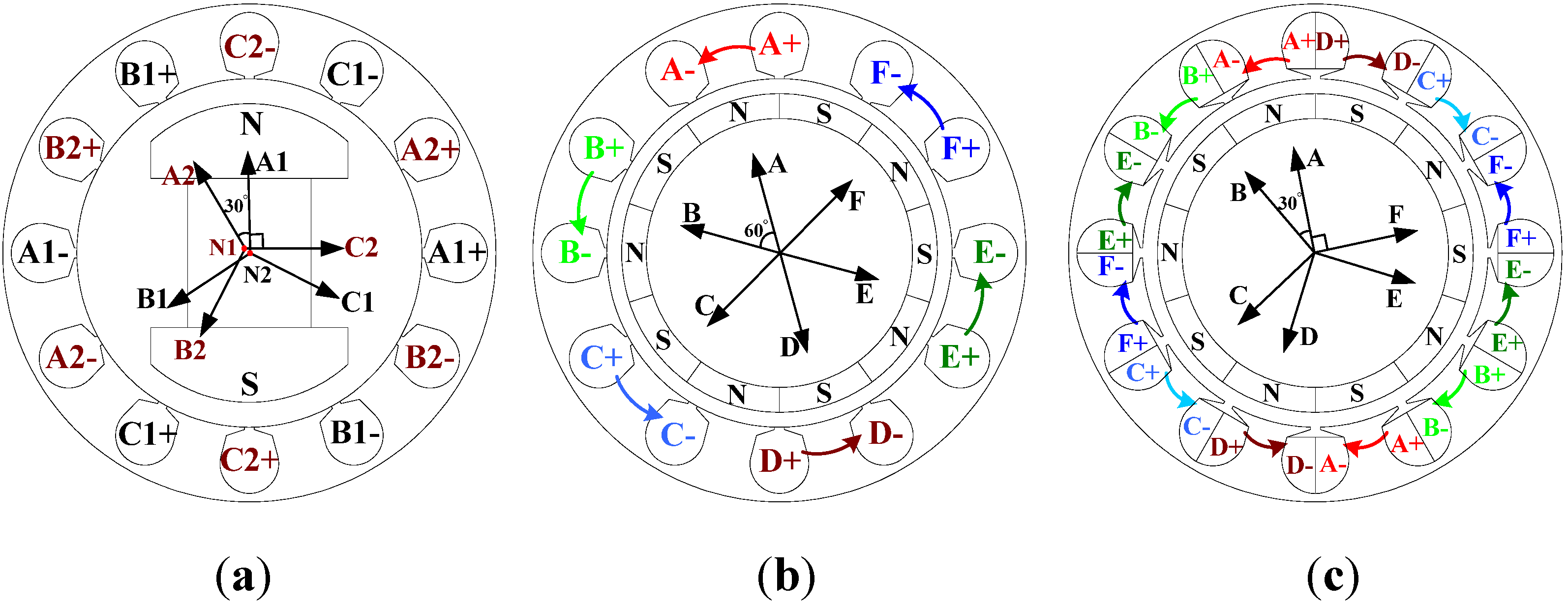
Three configurations of fault-tolerant six-phase PMSMs are given and compared, as shown in
Figure 2 and
Table 1. The windings of a dual three-phase PMSM are made up of two Y-connected windings [
21], as shown in
Figure 1(b) and
Figure 2(a). Despite the advantage of driving by two low-cost general three-phase inverters, the dual three-phase scheme has only two fault-tolerant units and fails to handle continuous and deep winding faults. The configurations in
Figure 2(b) and (c) are both supplied with six full-bridge inverters and adopt the open winding concept, allowing to achieve high fault-tolerant capability. On phase-belt level, the former with a phase belt of 60° was called the symmetric six-phase PMSM and the latter with a phase belt of 30° was named asymmetric six-phase PMSM or semi-12-phase PMSM [
22]. The symmetric-six phase PMSM has a magnetic circuit that is similar to a 60°-phase-belt three-phase PMSM. The MMF harmonic components in the dual three-phase and semi-12-phase PMSM consist of (12
k ± 1)th harmonics, while that of the symmetric six-phase scheme consists of (6
k ± 1)th harmonics. The harmonic components of MMF and rotor-magnet field interact with each other to produce the torque ripple. The symmetric six-phase scheme has more harmonic components compared to the other two structures, which leads to a large torque ripple. Besides, the symmetric-six phase scheme can’t handle certain four-phase-open-circuited faults in which two opposite phases survive, which is unchallenged for the semi-12-phase scheme.
Figure 2.
Configurations of six-phase PMSMs: (a) The dual three-phase PMSM; (b) The symmetric six-phase PMSM; (c) The semi-twelve-phase PMSM.
Figure 2.
Configurations of six-phase PMSMs: (a) The dual three-phase PMSM; (b) The symmetric six-phase PMSM; (c) The semi-twelve-phase PMSM.
Table 1.
Comparison of three six-phase PMSM configurations.
Table 1.
Comparison of three six-phase PMSM configurations.
| Feature | Dual Three-phase | Symmetric Six-phase | Semi-12-phase |
|---|
| Torque ripple | Low | High | Low |
| Winding connection | Close winding | Open winding | Open winding |
| Fault-tolerant unit | Two 3-phase windings | Independent phases | Independent phases |
| Inverters | Half-bridge | Full-bridge | Full-bridge |
| PE Cost | Low | Slightly high | Slightly high |
In this paper, a semi-12-phase outer rotor PMSM which has great advantages of low torque ripple and high fault-tolerant capability is proposed for high-comfort and high-reliability four-wheel-driving electric vehicle applications [
23,
24]. For four-wheel-driving EVs, the torque ripple of the PMSM is directly associated with the vibration and acoustic noise. The PMSM equipped with fractional slot concentrated winding has a lower torque ripple which implies a lower vibration and acoustic noise, especially at low speeds. This feature makes the machine discussed in this paper quite competitive in four-wheel-driving EV applications.
High iron loss and temperature rise of permanent magnets (PMs) due to excessive magnetomotive force (MMF) harmonic components are the main drawbacks for a PMSM equipped with FSCWs, especially in high-speed operation. In this paper, all-teeth-wound FSCW is employed, and the improved winding disposition changes the winding factor of each harmonic component to suppress air-gap MMF harmonic components.
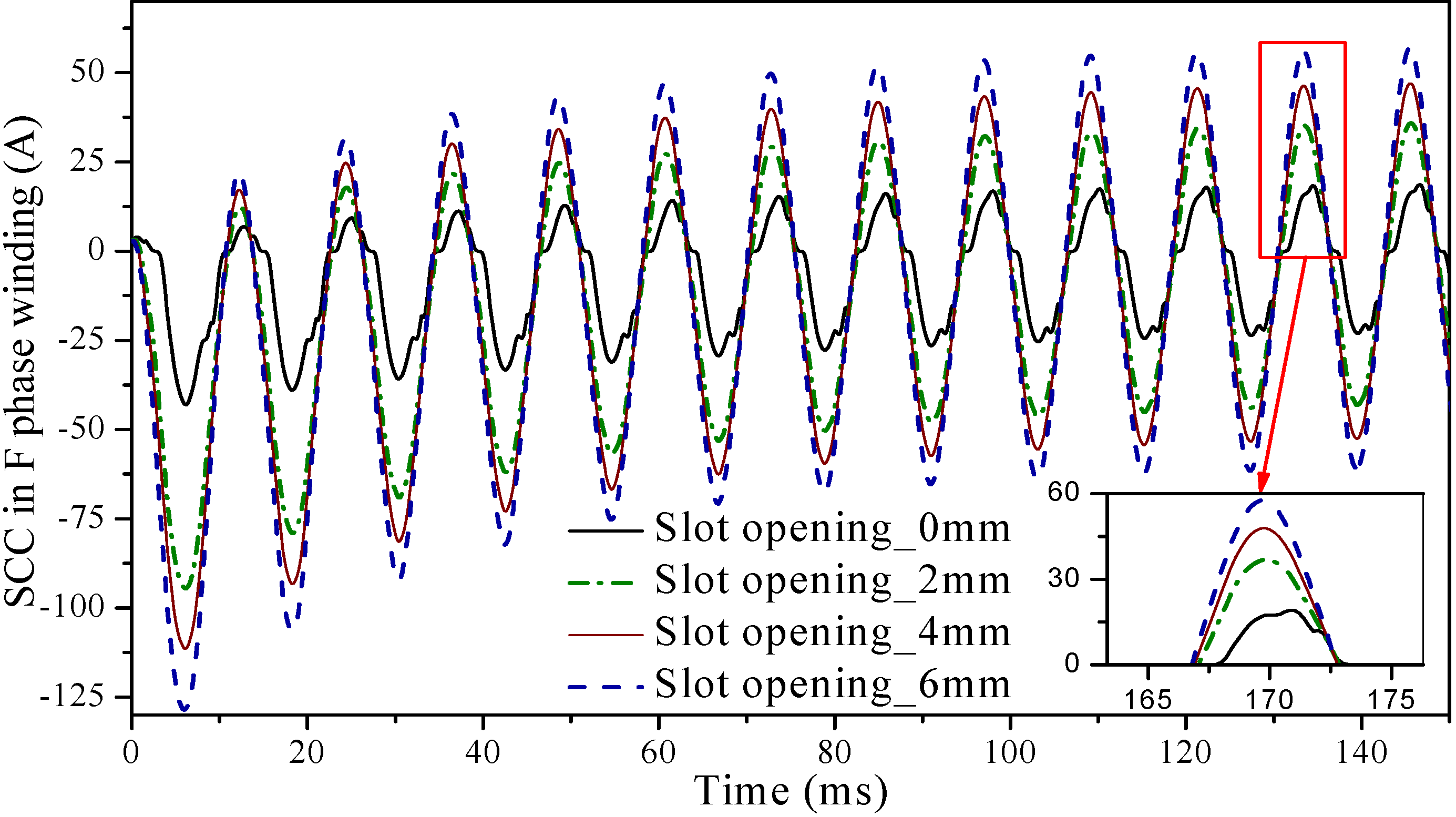
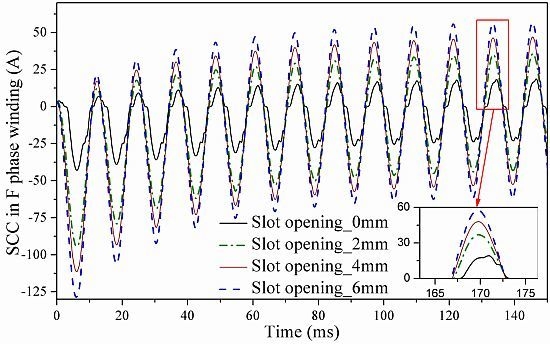
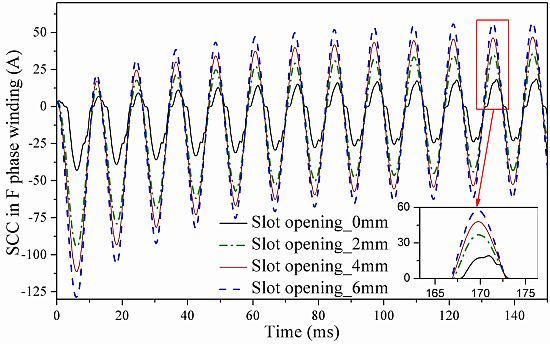
The current induced in the short-circuited coil of a distributed overlapped-winding induction machine can be limited to nearly zero by canceling the flux that passes through the short-circuited coil, which is impossible for a PMSM equipped with FSCWs. Therefore, the only way to limit short-circuit current (SCC) is to have a large leakage inductance. For this purpose, an analytical method that calculates the slot leakage inductance of stators with all-teeth-wound FSCWs is proposed.
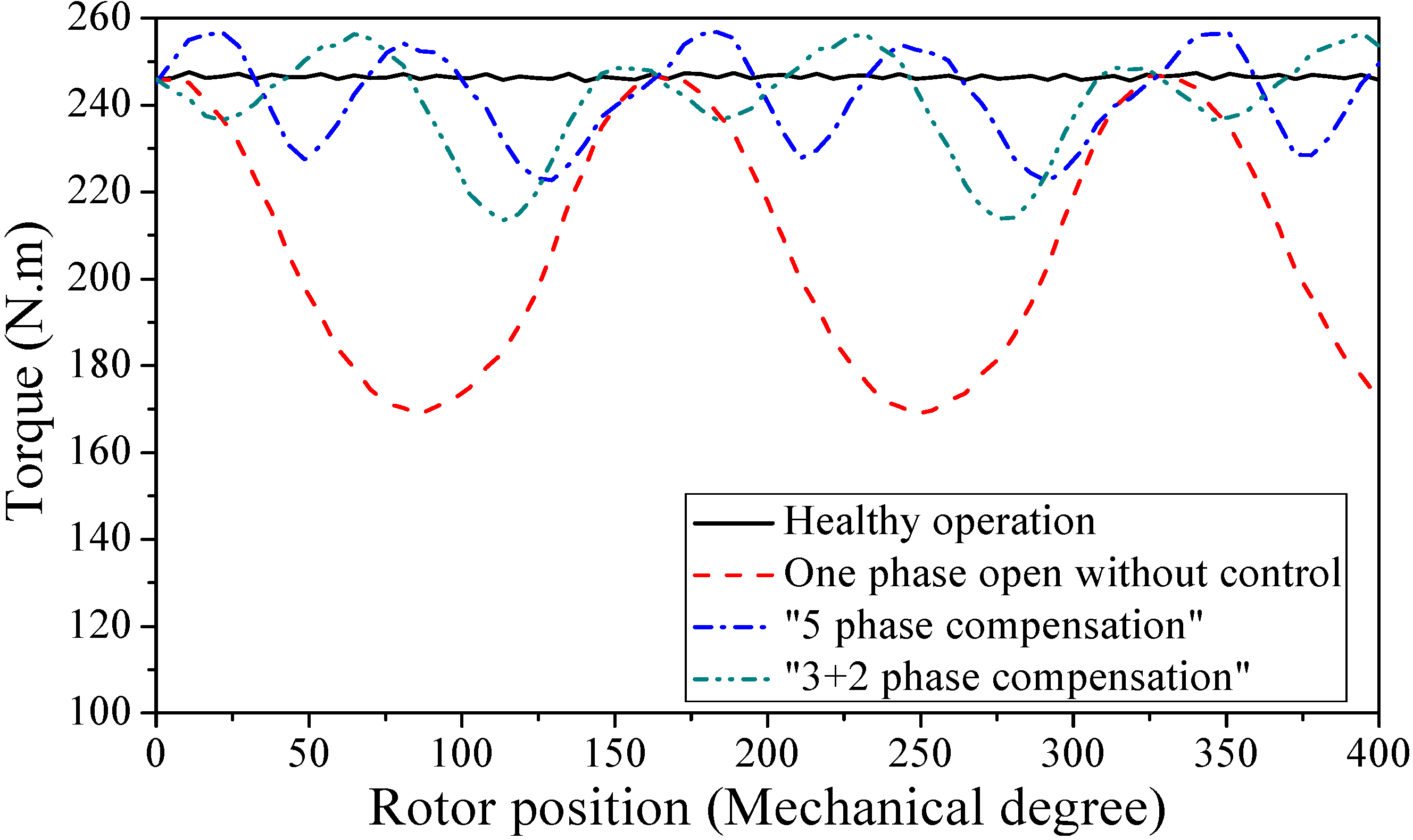
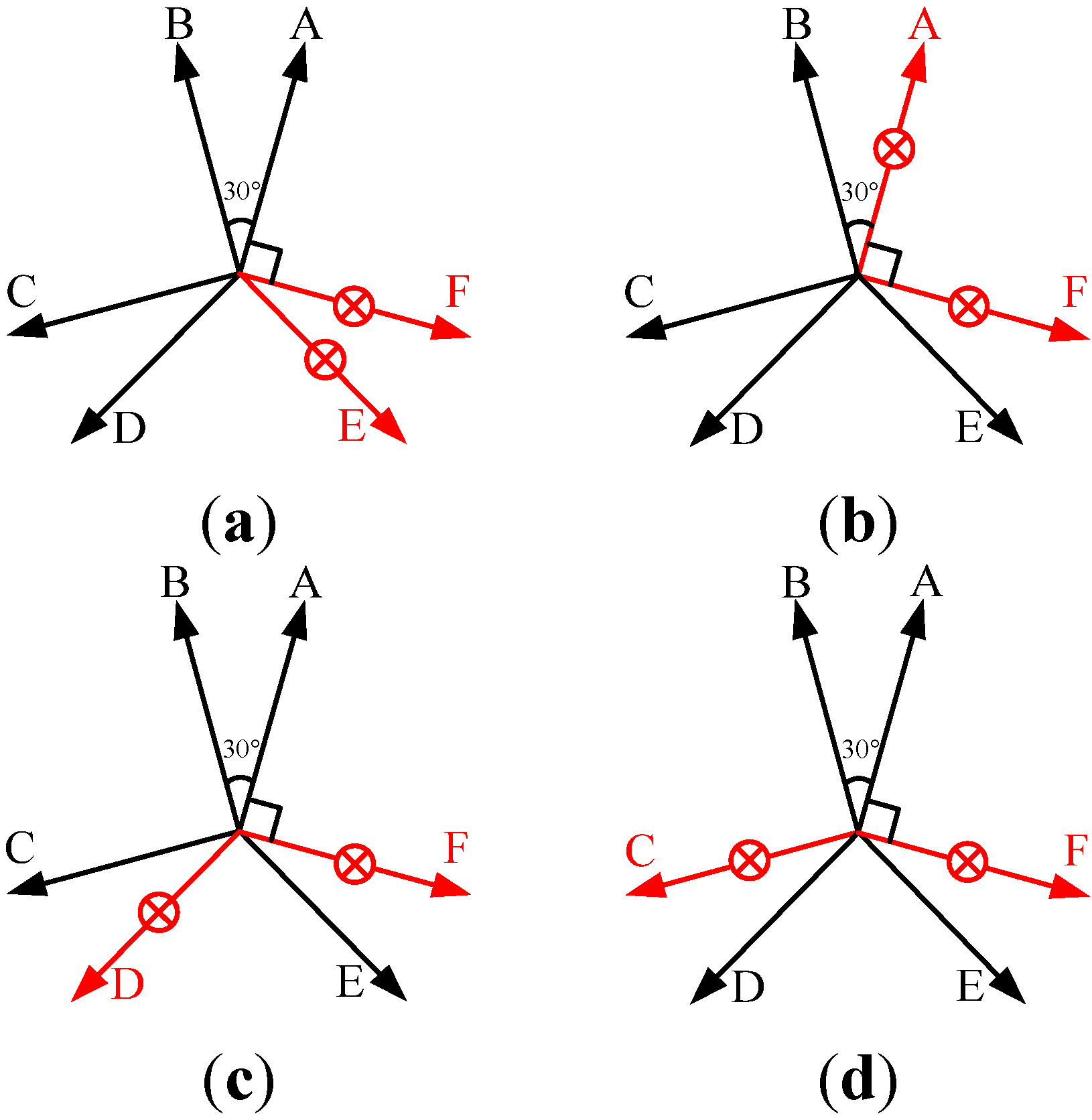
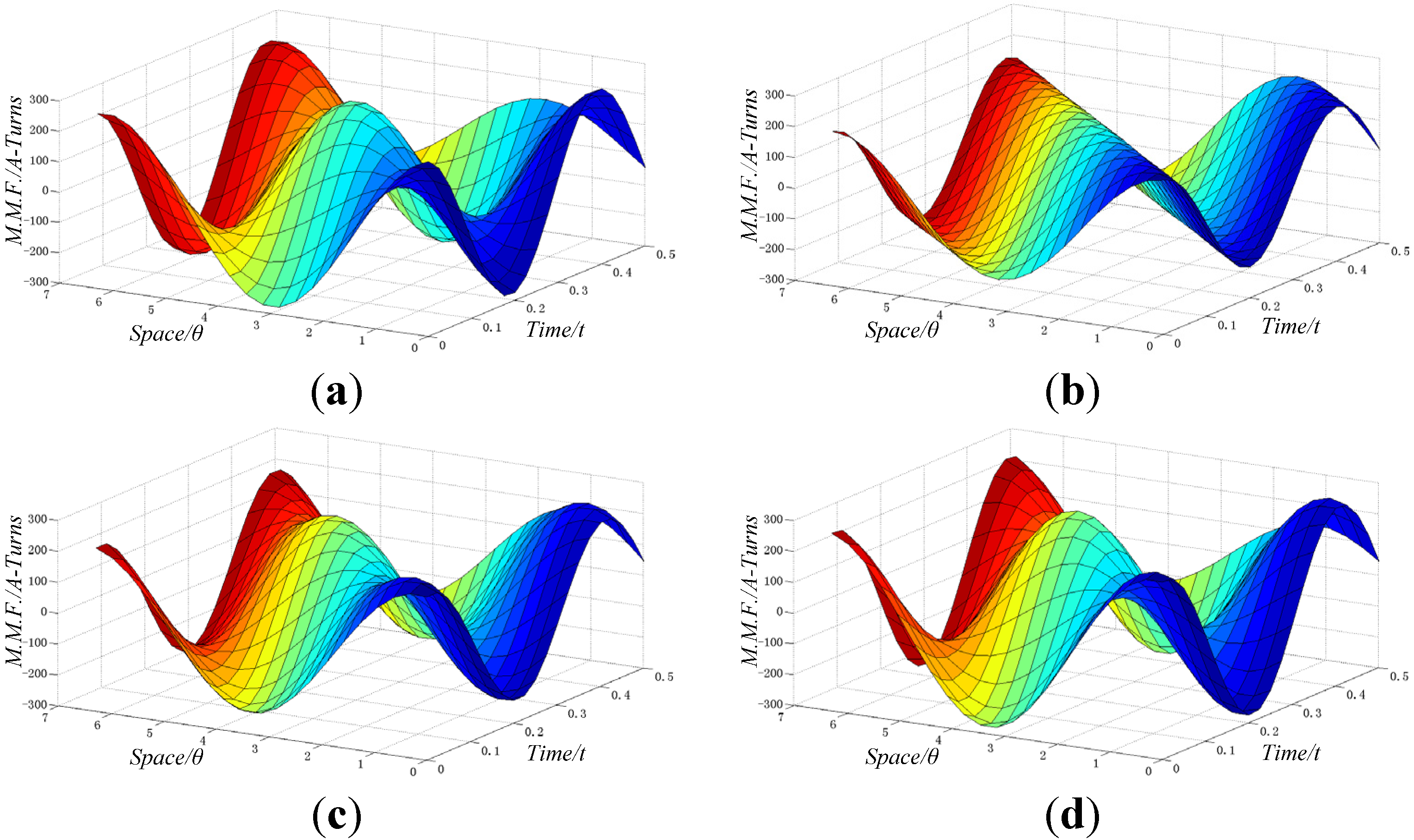
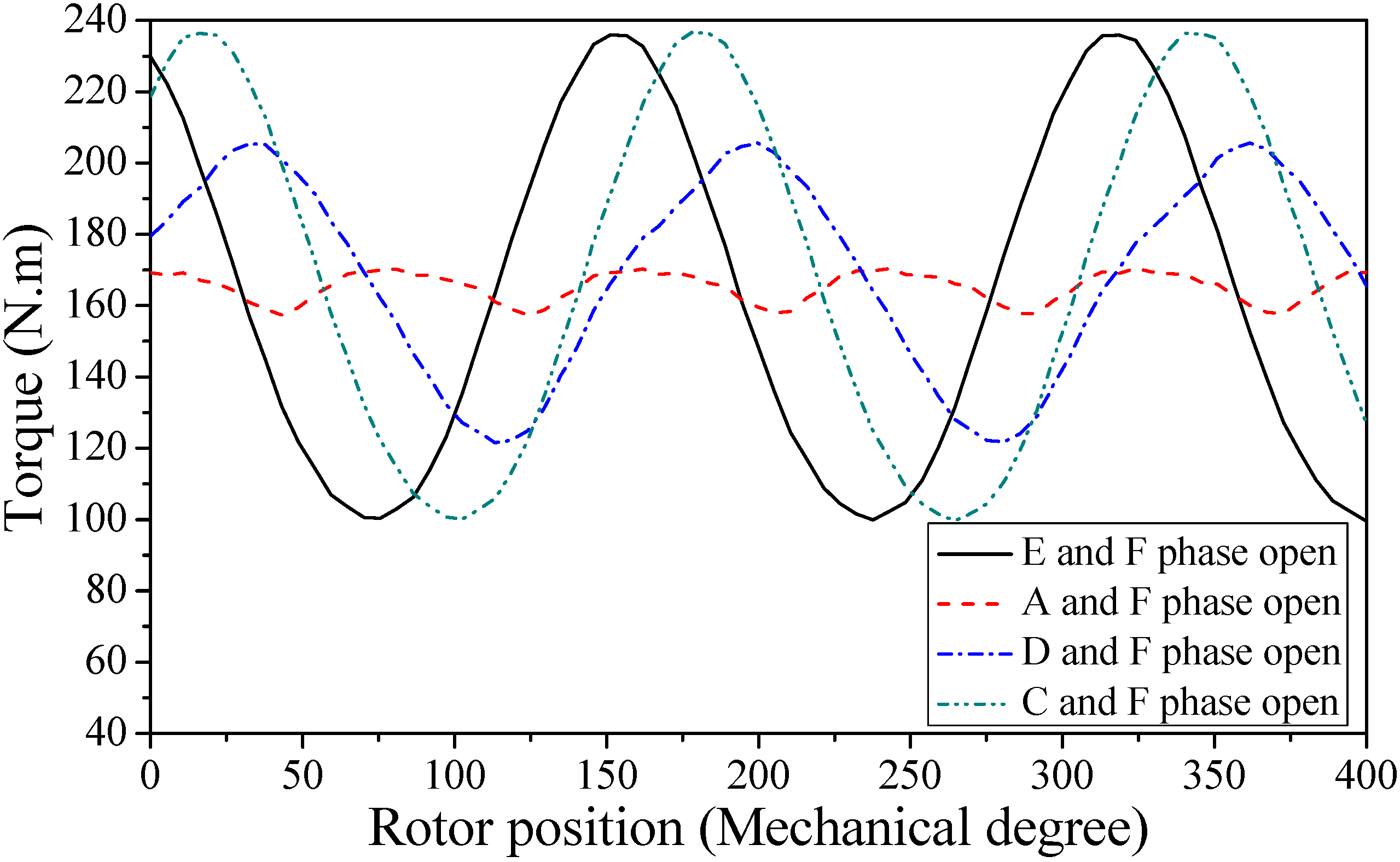
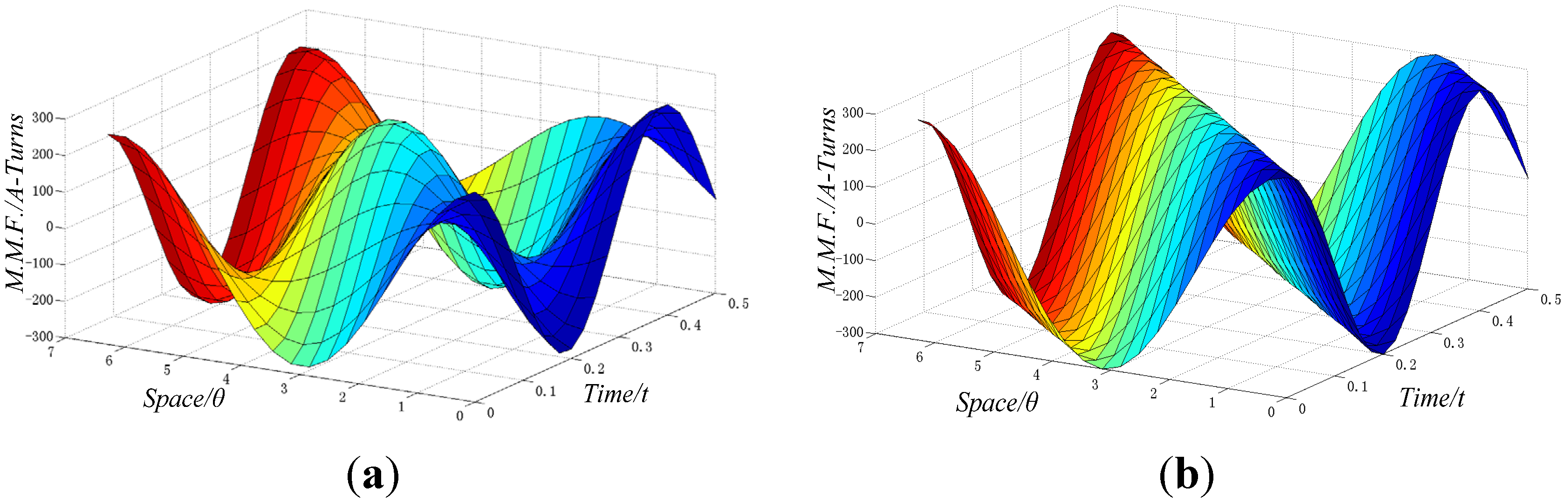
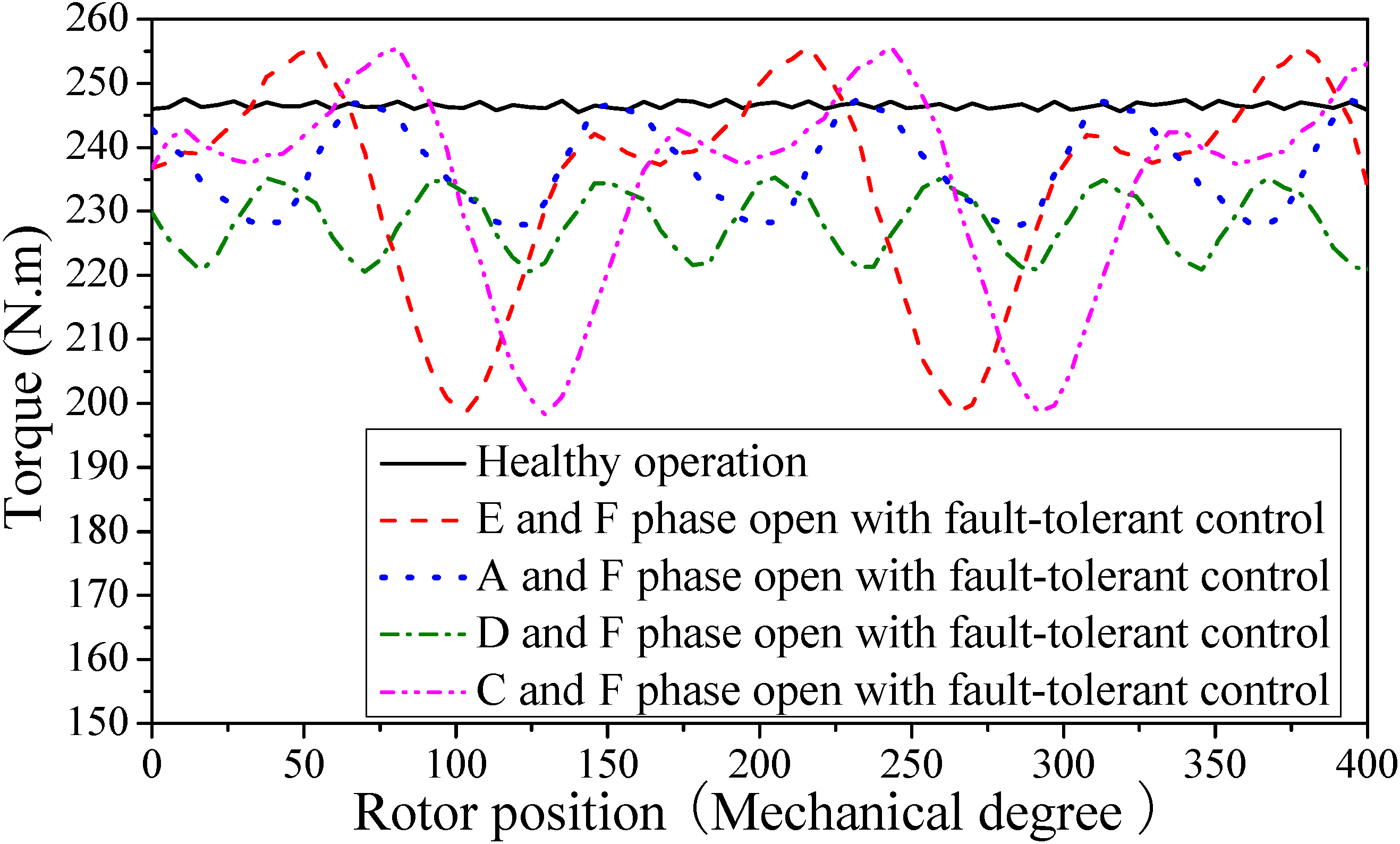
The semi-12-phase PMSM is potentially fault tolerant due to its additional degrees of freedom. The fault-tolerant control strategy that provides the same torque-producing MMF to ensure safe operation is investigated with one-phase and two-phase-open fault based on finite element analysis. The fault-tolerant control strategies in each faulty mode are investigated.
2. Analysis and Suppression of MMF Harmonics
FSCWs, in which slot (Q) and pole number (2p) satisfy 2p = Q ± 2, are employed in motor design in order to maximize the flux linkage and torque density. Besides, the cogging torque is quite low due to the relatively large common multiple of pole and slot number.
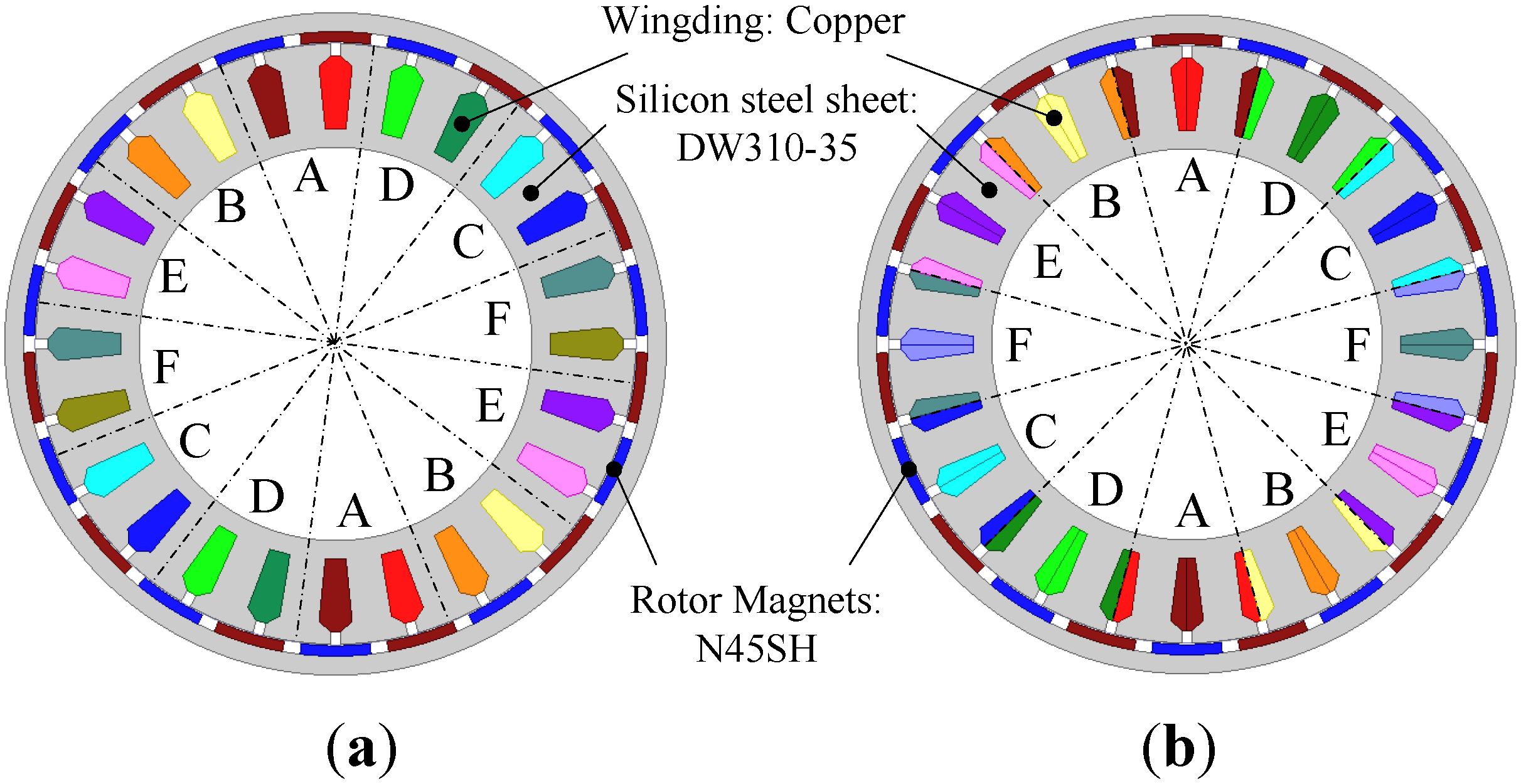
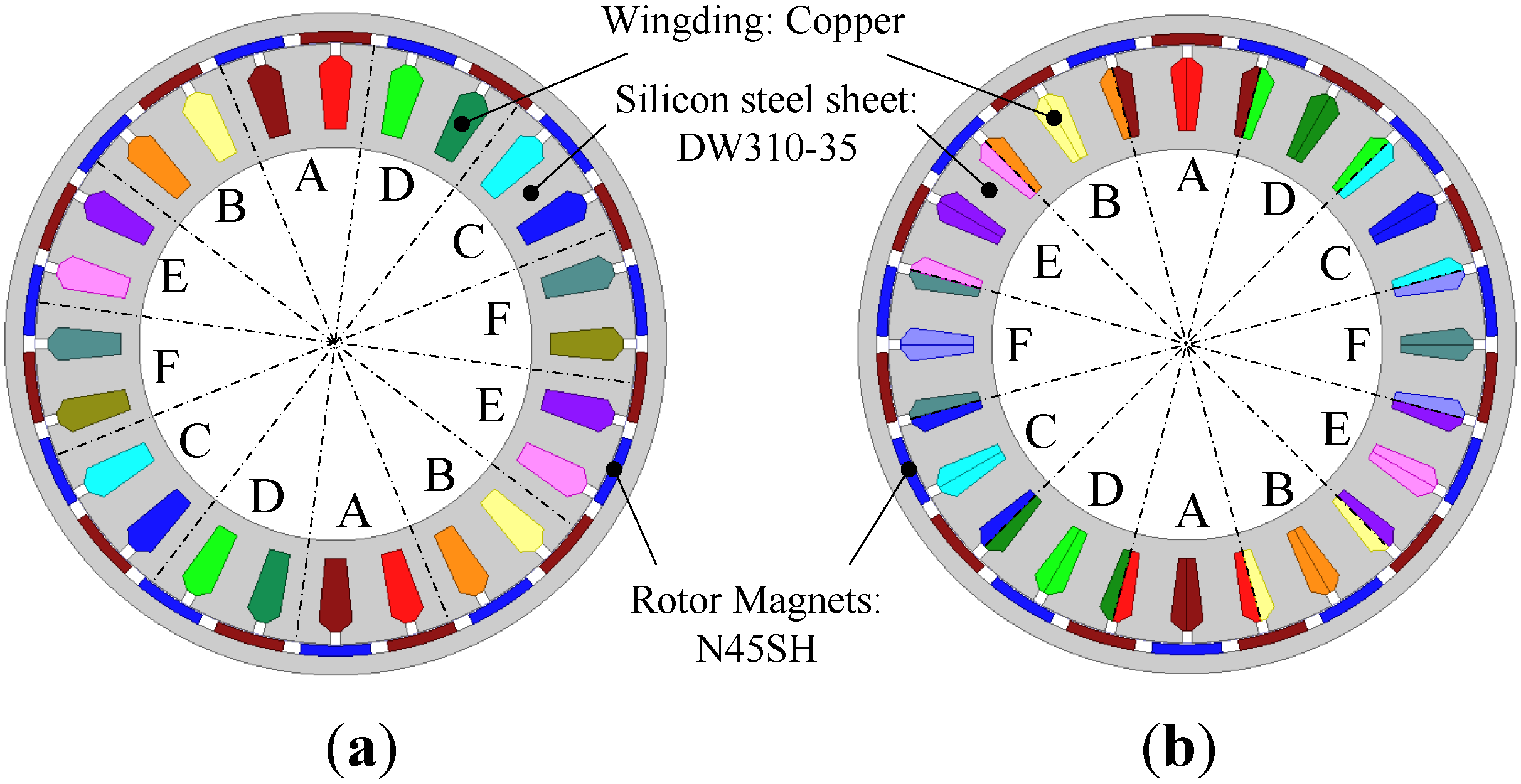
There are two winding patterns for FSCWs. One is all-teeth-wound windings, which means the windings are wound on every tooth, and the other is alternate-teeth-wound windings, which means the windings are wound on every other tooth. The two patterns of winding disposition for a 24-slot/22-pole semi-12-phase PMSM equipped with FSCWs are shown in
Figure 3(a) and (b), respectively.
Figure 3.
Cross-section diagram of two winding dispositions of a 24-slot/22-pole outer rotor semi-12-phase PMSM equipped with FSCWs: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
Figure 3.
Cross-section diagram of two winding dispositions of a 24-slot/22-pole outer rotor semi-12-phase PMSM equipped with FSCWs: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
The harmonic analysis of MMF is performed, considering only symmetric systems. Harmonic distribution depends on the stator winding dispositions and the slot/pole combination. For a semi-12-phase PMSM equipped with FSCWs, the (12
k ± 1)th (
k = 0, 1, 2…) harmonics of MMF are produced in the air-gap when the windings are supplied with a sinusoidal current [
22]. For the 24-slot/22-pole PMSM shown in
Figure 3(a), the fundamental component of MMF is the 22-pole winding-produced MMF harmonic. Meanwhile, the 2-pole sub-harmonic component which travels at a reverse different speed is particularly high. Thus it induces eddy current both in iron and PMs, which is decided by the amplitude and speed difference. Such a large harmonic content can drastically reduce the motor performance. Specifically, it can reduce the power factor and efficiency, and cause temperature rises in the PMs. Harmonic suppression is urgently needed. As shown in
Figure 3(b), all-teeth-wound windings are employed to solve this problem. Such a winding disposition changes the winding factor of each harmonic to achieve the goal of harmonic suppression.
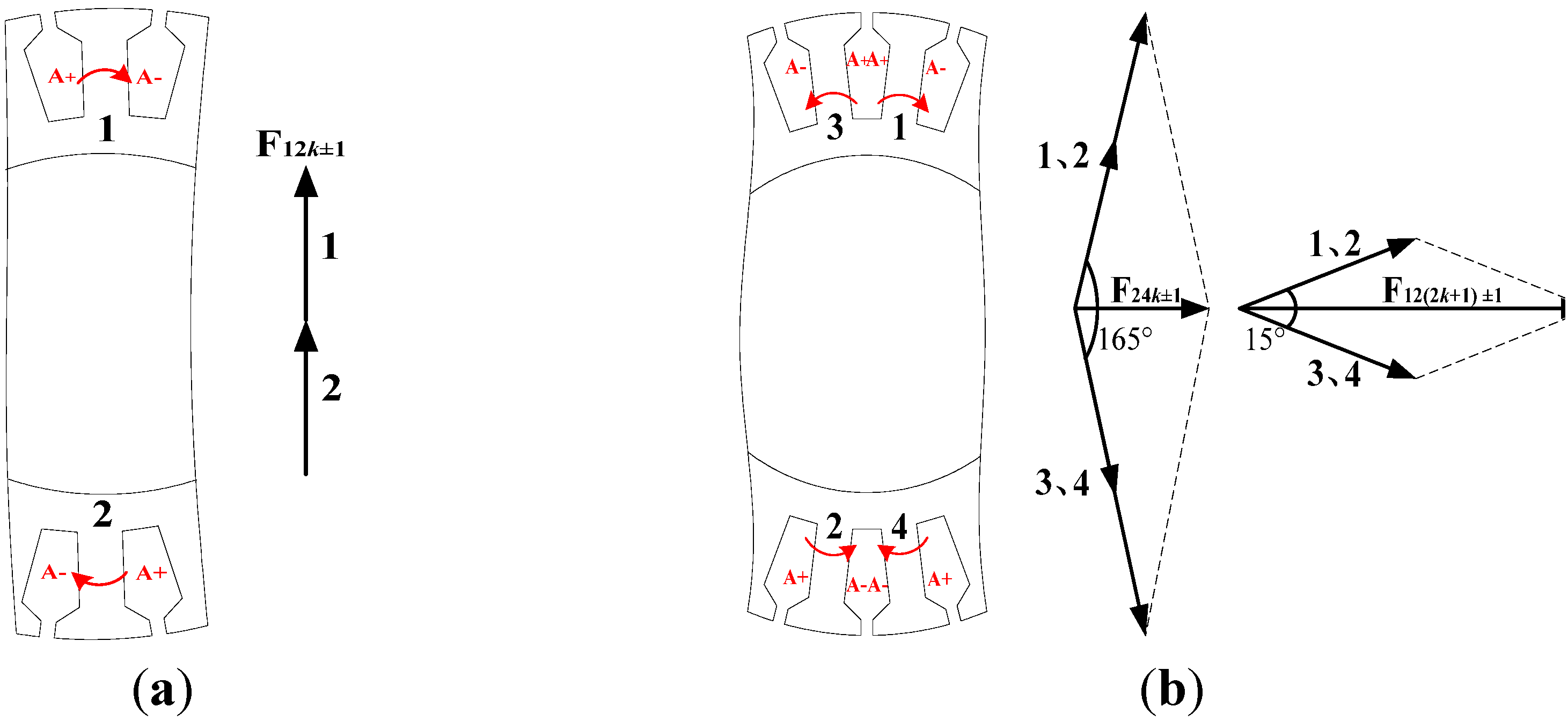
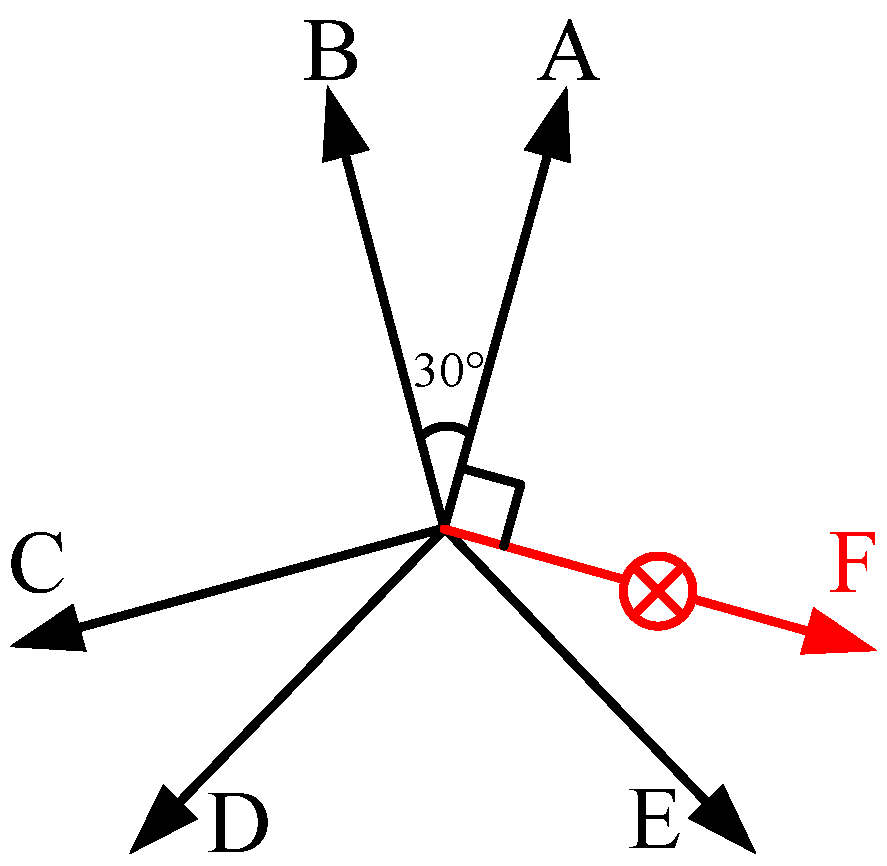
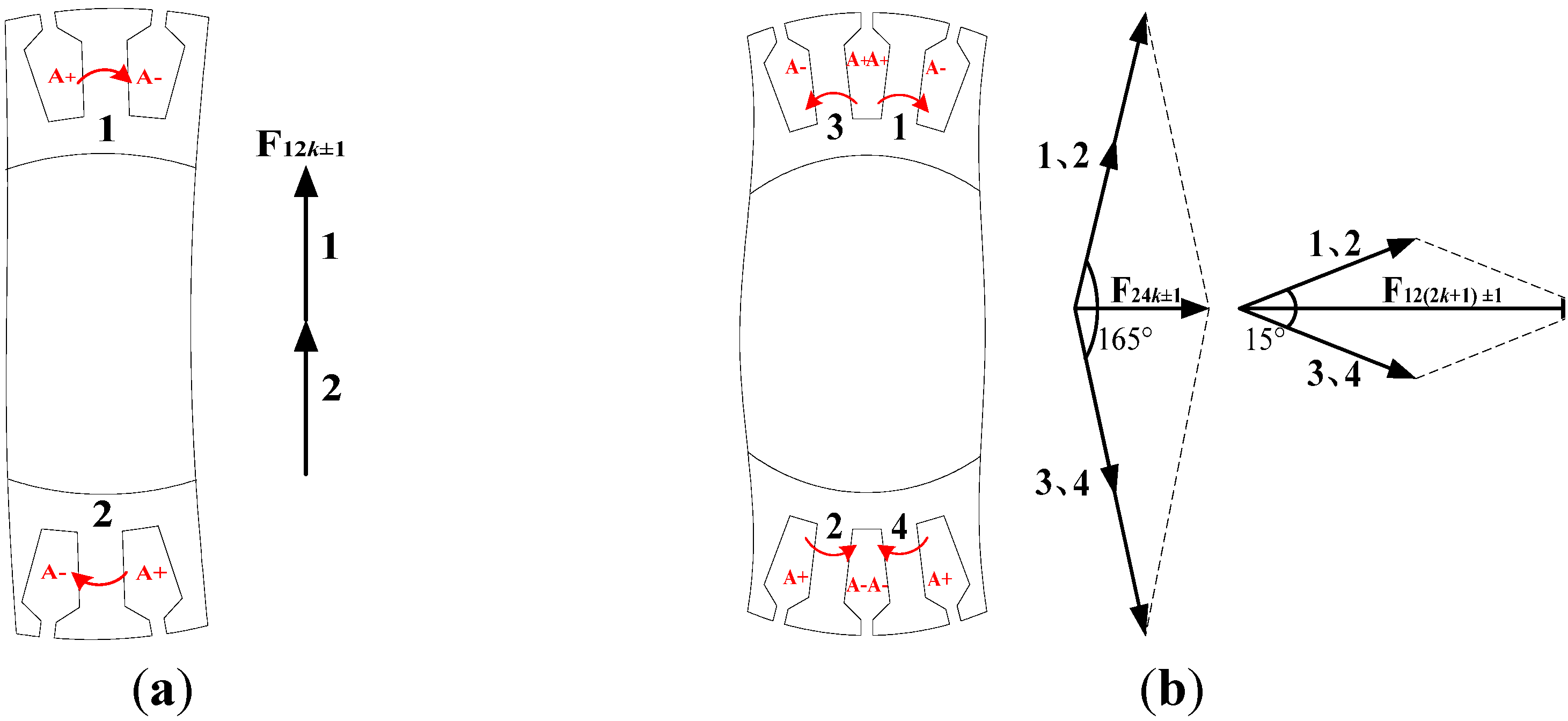
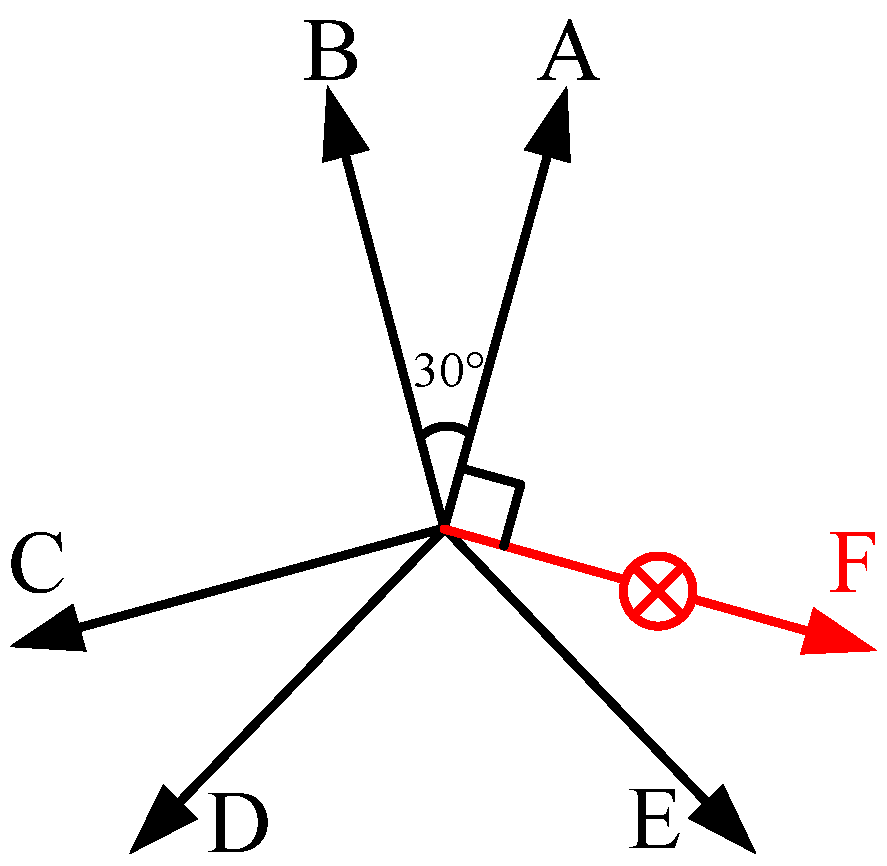
More details are shown in the following analysis. First, we consider the derivation of air-gap MMF. The angle between the two MMF vectors of arbitrary phase is 165 degree rather than zero or 180, as is shown in
Figure 4(b). Such a winding disposition changes the winding factor of each harmonics to achieve the goal of harmonic suppression. The (24
k ± 1)th (
k = 0, 1, 2…) harmonic contents are suppressed, as shown in
Table 2.
Figure 4.
MMF vector composition of phase A winding: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
Figure 4.
MMF vector composition of phase A winding: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
Table 2.
Derivation of air-gap MMF for all-teeth-wound windings.
Table 2.
Derivation of air-gap MMF for all-teeth-wound windings.
| Harmonic Order | Calculation of MMF |
|---|
| 1 | F1cosωt + F1cos(ωt + 165°) = 0.13·2F1cos(ωt + 82.5°) |
| 11 | F11cos11ωt + F11cos11(ωt + 165°) = −0.99·2F11cos(11ωt + 187.5°) |
| 13 | F13cos13ωt + F13cos13(ωt + 165°) = 0.99·2F13cos(13ωt − 7.5°) |
| 23 | F23cos23ωt + F23cos23(ωt + 165°) = −0.13·2F23cos(23ωt + 97.5°) |
| 25 | F25cos25ωt + F25cos25(ωt + 165°) = 0.13·2F25cos(25ωt − 97.5°) |
| 24k ± 1 | 0.13·2F24k±1cos[(24k ± 1)ωt + 82.5·(24k ± 1)°] |
| 12(2k + 1) ± 1 | 0.99·2F12(2k+1)±1cos[(12(2k + 1) ± 1)ωt + 82.5·(12(2k + 1) ± 1)°] |
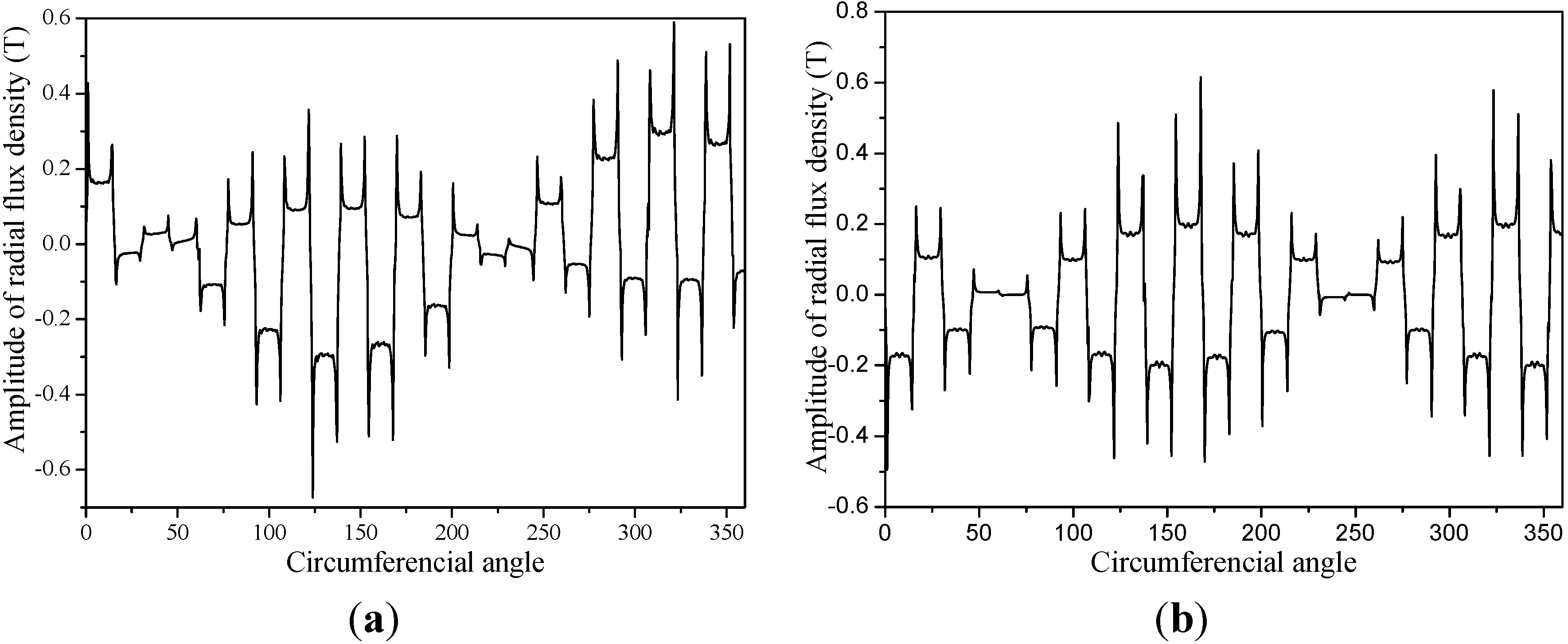
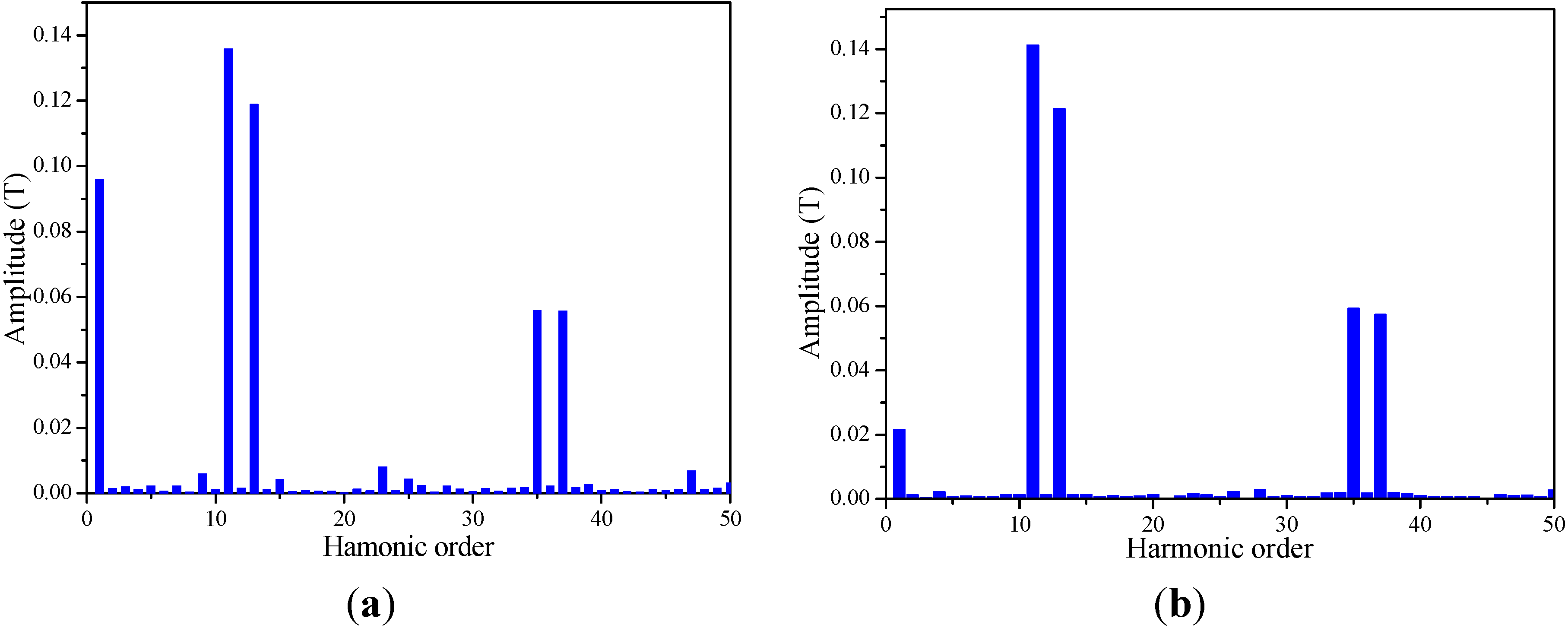
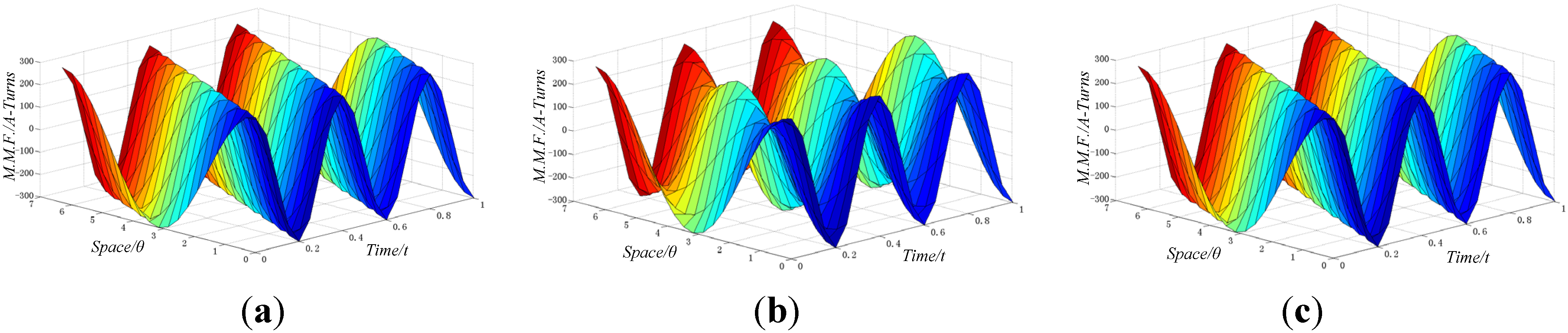
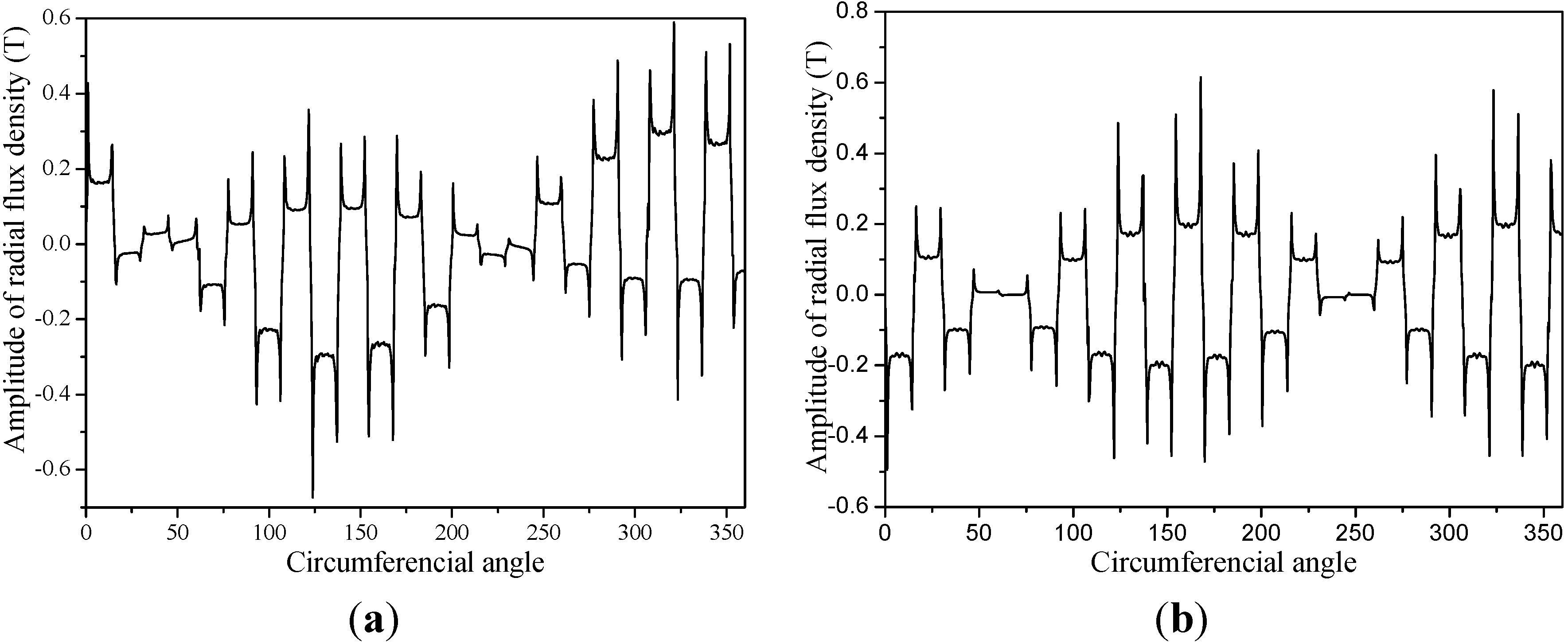
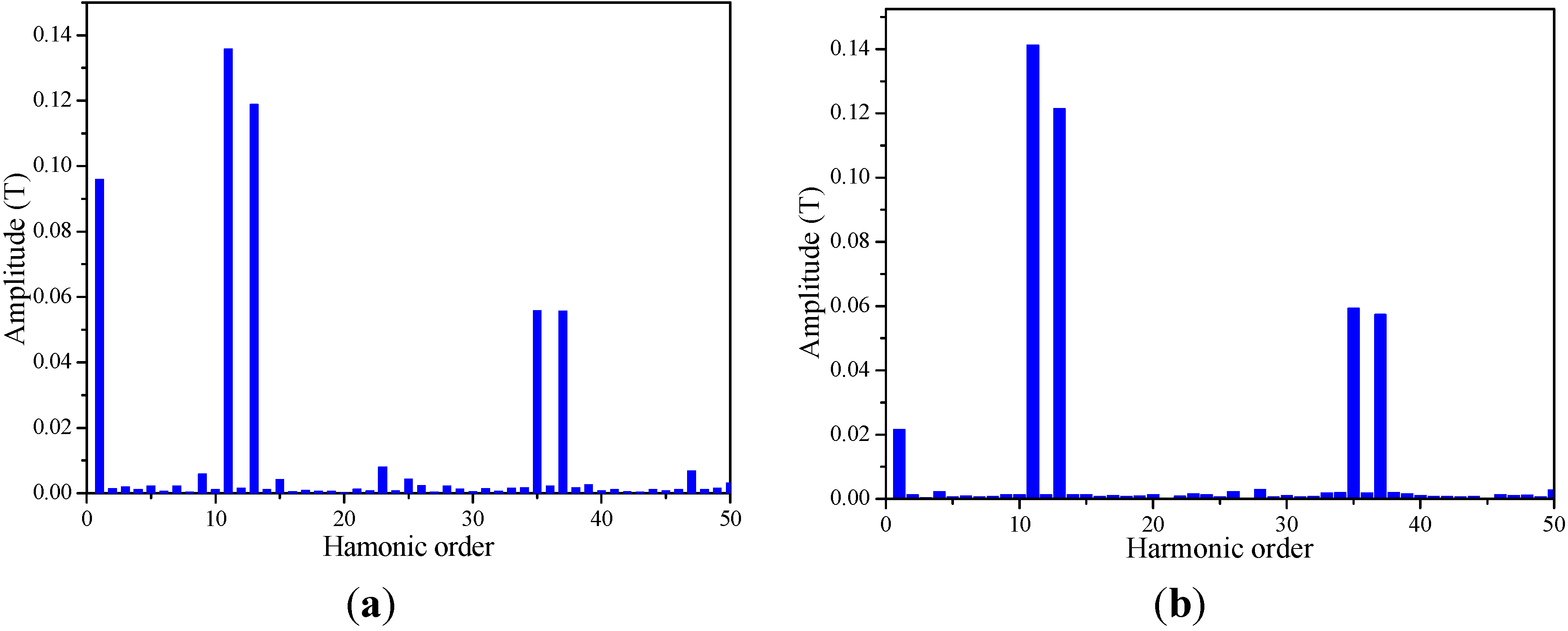
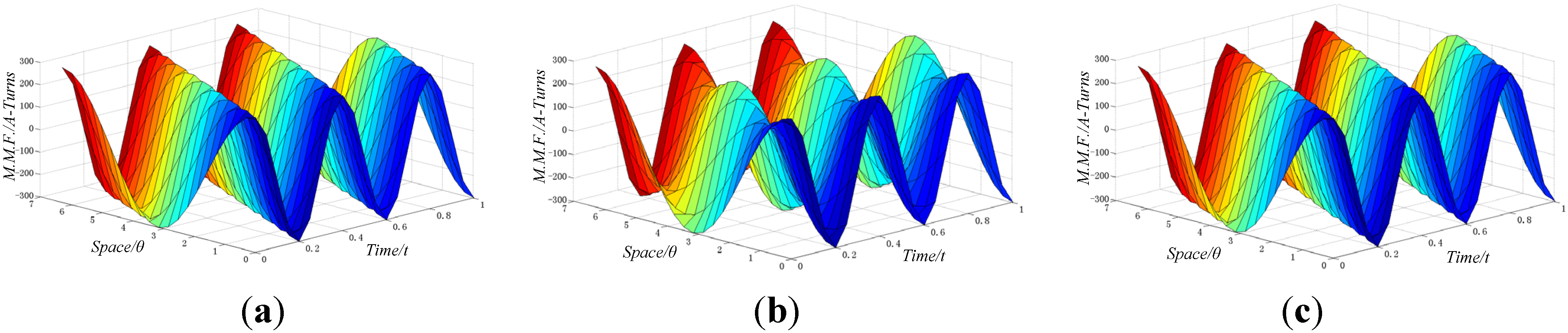
The effectiveness of harmonic suppression can be seen in
Figure 5 and
Figure 6 without considering the effect of rotor PMs. The amplitudes of 1st, 11th and 13th MMF harmonics are close to each other in a 24-slot/22-pole PMSM. However, the magnetic permeance of the 1st harmonic is lower than that of the 11th and 13th harmonics due to stator slotting. Thus, we could see the 1st air-gap flux density harmonic component which has lower amplitude than the 11th and 13th one in
Figure 6(a). Besides, the 2-pole sub-harmonic component is prominently decreased by employing all-teeth-wound windings.
For the 24-slot/22-pole scheme, the 11th MMF harmonic is the fundamental component. The eddy-current loss of rotor magnets is determined by the relative velocity (
versus the fundamental component) and amplitude of the harmonic. As can be seen in
Figure 6, the 1st, 13th, 35th, 37th,
etc. are serious harmonics. The rotating speeds of the harmonics are inversely proportional to the order they have. Thus, the 1st harmonic has highest relative velocity with respect to the fundamental component (twelvefold the machine speed), which makes it become the most serious and dangerous harmonic to the eddy-current loss of rotor magnets. While, the relative speed of 13th harmonic component to the fundamental one is less than double machine speed. Thus, the impact of the 13th harmonic component on eddy-current loss is much more alleviative than that of the 1st one. Besides, the 13th harmonic has the same distributed factor with the fundamental component (11th). Thus, it cannot be eliminated. Besides, all the harmonic components in the 24-slot/22-pole machine lead to a large harmonic leakage inductance. On one hand it increases the inductance of the machine which is essential for flux-weakening operation and short-circuit current suppression, and on the other hand it lowers the power factor of the machine.
Figure 5.
Air-gap flux density of 24-slot/22-pole PMSM: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
Figure 5.
Air-gap flux density of 24-slot/22-pole PMSM: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
Figure 6.
Air-gap flux density harmonic analysis of 24-slot/22-pole PMSM: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
Figure 6.
Air-gap flux density harmonic analysis of 24-slot/22-pole PMSM: (a) Alternate teeth wound scheme; (b) All teeth wound scheme.
In the following a calculation method of harmonic leakage inductance is presented. The relationship between the
hth harmonic and main inductance is given by [
25]:
where
Lh is
hth harmonic leakage inductance;
Kωh is the
hth harmonic winding factor (
h = 12
k ± 1,
k = 0, 1, 2, 3…);
Lm is the main inductance. The
hth harmonic leakage inductance can be reduced through changing its winding factor. The total harmonic leakage inductance equals to the sum of all harmonic leakage inductances minus the main inductance:
where
Ll is total harmonic leakage inductance. Σ
S is harmonic leakage coefficient. All-teeth-wound FSCW diminishes the harmonic leakage coefficient and reduce the harmonic leakage inductance. The winding factor is the determinants of harmonic leakage coefficient Σ
S:
where
Kph is the pitch factor;
Kdh is the distribution factor;
Kskh = 1 is the skewing factor:
where
y = 1 is the pitch of FSCW. The slot number per pole per phase is:
Equation (5) can be expressed as:
The distribution factor of FSCW is:
where:
The meaning of
q´ is 11 poles occupying two slots per phase. The phase belt is 30°. For the PMSM equipped with all-teeth-wound FSCWs shown in
Figure 3(b), the winding factor can be written as:
where the two coefficients in Equation (10) are added to take harmonic suppression into account. Finally, the harmonic leakage coefficient is given by:
while for alternate-teeth-windings:
It should be noted that the harmonic leakage coefficient is prominently decreased after applying all-teeth-wound winding. However, the harmonic leakage inductance should still be taken into account due to the comparable value with main inductance. The semi-12-phase machine has been simulated using finite-element method, as shown in
Table 3.
Table 3.
Results of finite element analysis.
Table 3.
Results of finite element analysis.
| Slot/pole Combination | Torque (N·m) | Torque Ripple (%) | Iron Loss (W) | PM Loss (W) | Power Factor | Efficiency (%) |
|---|
| 24S/22P/AT | 245.88 | 0.512 | 92.51 | 38.61 | 0.870 | 94.3 |
| 24S/22P/AL | 245.79 | 0.615 | 86.31 | 35.86 | 0.916 | 95.6 |
| 24S/26P/AT | 245.99 | 0.810 | 112.6 | 48.91 | 0.935 | 94.4 |
| 24S/26P/AL | 245.92 | 0.747 | 109.1 | 46.03 | 0.946 | 95.0 |
All of the four configurations compared in
Table 3 have a very smooth torque. For the 24-slot/22-pole combination, the iron loss and PM loss of all-teeth-wound machine are 6.7% and 7.1% less than for the alternate-teeth-wound one, respectively. For the 24-slot/26-pole combination, the iron loss and PM loss of all-teeth-wound machine are 3.1% and 5.9% less than the alternate-teeth-wound one, respectively. The efficiencies of the machines equipped with all-teeth-wound FSCWs are higher than that with alternate-teeth-wound FSCWs.
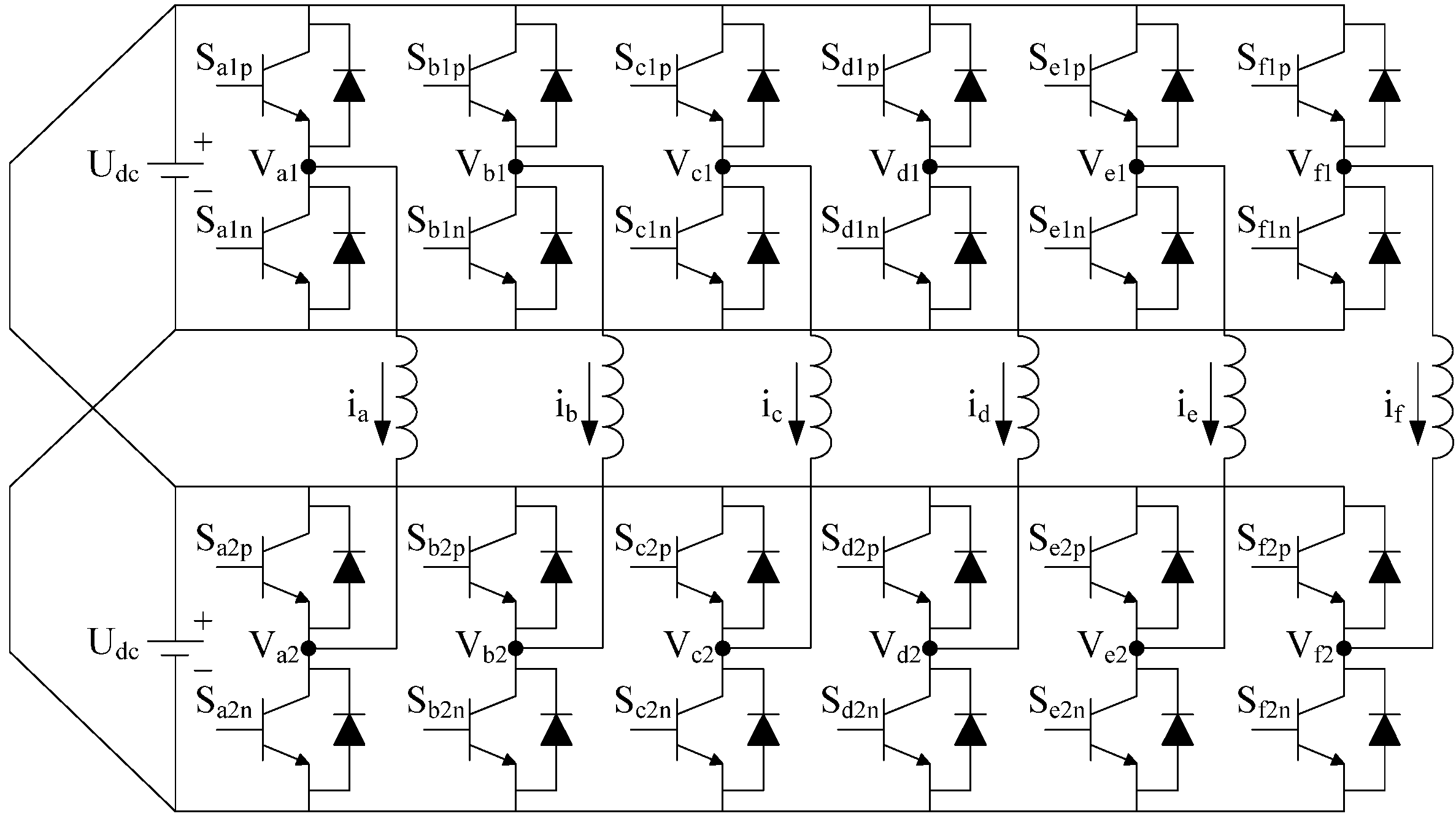
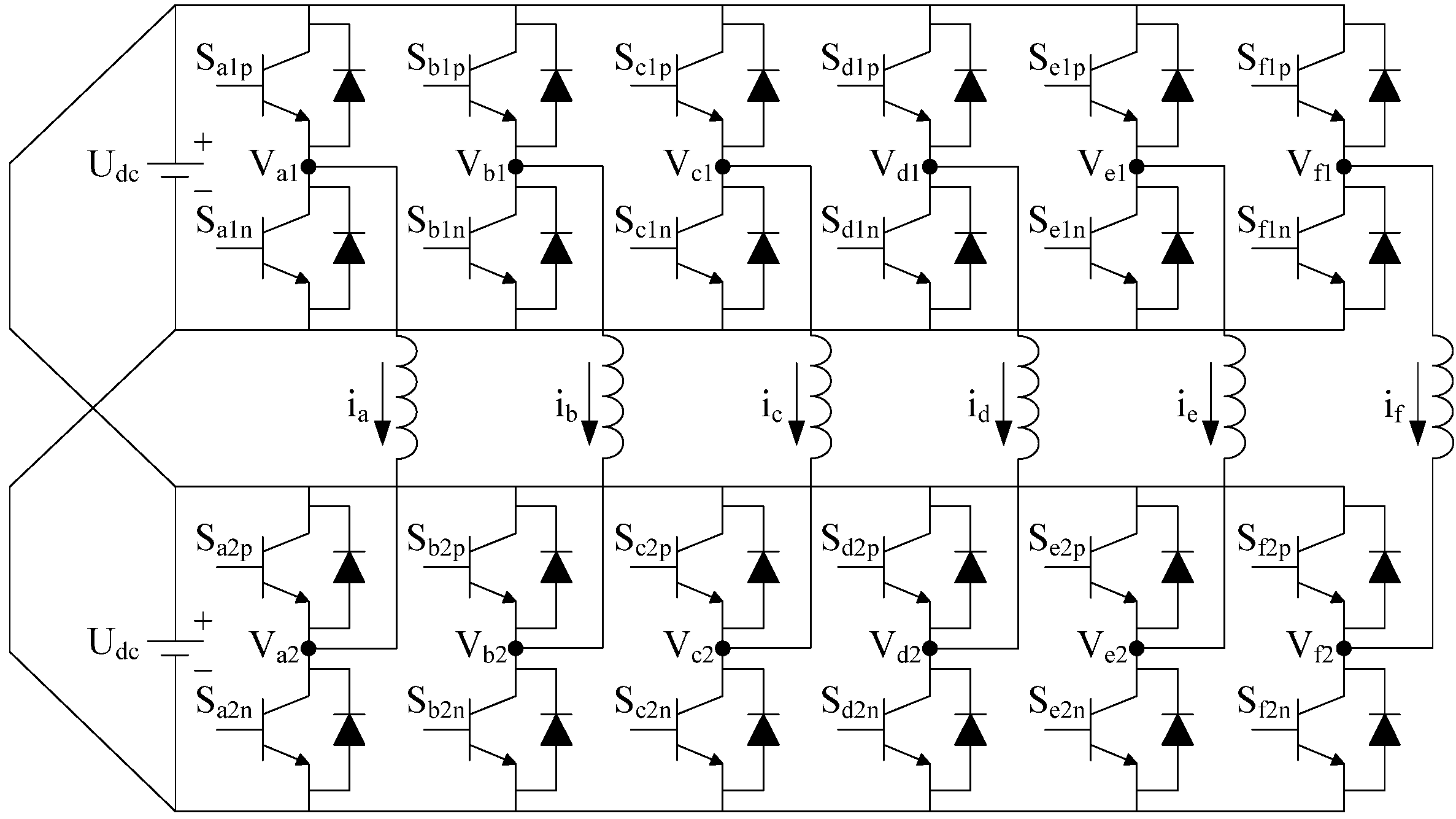
A 24-slot/22-pole all-teeth-wound scheme has been chosen for further study, since it has the highest efficiency among the four schemes. And, an outer-rotor type machine is employed to accommodate wheel-driving electric vehicles. The semi-twelve-phase open-winding PMSM is supplied with a cascaded voltage source convertor which consists of six four-switch full-bridge inverters, as shown in
Figure 7. Additionally, the electromagnetic characteristics are shown in
Table 4.
Figure 7.
Cascaded VSC feeding the semi-twelve-phase open-winding PMSM.
Figure 7.
Cascaded VSC feeding the semi-twelve-phase open-winding PMSM.
Table 4.
Key parameters and dimensions of the 24-slot/22-pole all-teeth-wound scheme.
Table 4.
Key parameters and dimensions of the 24-slot/22-pole all-teeth-wound scheme.
| Parameters/Dimensions | Units | Value |
|---|
| Number of slots/poles | | 24/22 |
| Slots per pole per phase | | 2/11 |
| Stator outer diameter | mm | 290 |
| Rotor outer diameter | mm | 310 |
| Stack length | mm | 50 |
| Material of rotor magnets | | N45SH |
| Pole arc coefficient | | 0.75 |
| Magnet height | mm | 5 |
| Air-gap thickness | mm | 0.8 |
| Rated/Peak power | kW | 12/24 |
| Rated per phase current | Arms | 25 |
| Rated/Maximum back-EMF | Vpk | 167/288 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}